步进电动机及其控制
步进电动机的控制

1.工作原理 2.接线 3.控制方式 4.其他
一、步进电动机的简介
步进电动机(stepping motor)是将电脉冲激励 信号转换成相应的角位移或线位移的离散值控制 电动机,这种电动机每当输入一个电脉冲就动一 步,所以又称脉冲电动机。 urage the signal for the electric pulses to the displacement or the displacement of discrete values control motors, motor when entering a electric pulses will move a step, also called a pulse the motor.
由上述分析可知,要使磁阻式步进电机具有工作能力,最起码的条件是定子极分度 角不能被齿距角整除,且应满足下列方程: 极分度角/齿距角= R + k· 1/m 进一步化简得齿数z: z = q (mR + k) (2-3) 式中:m──相数; q──每相的极数; k──≤ (m - 1)的正整数; R──正整数,为0、1、2、3……。 按选定的相数和不同的极数,由上式就可推算出转子齿数。 因为三相双三拍步进电机不易失步,控制精度比较高,所以本文对三相双三拍步 进电机进行控制,定子有三对磁极,运行时两相同时通电,循环带动转子转动。 4、转速控制 控制步进电机的运行速度,实际上是控制系统发出时钟脉冲的频率或换相的周 期,即在升速过程中,使脉冲的输出频率逐渐增加;在减速过程中,使脉冲的输出频 率逐渐减少。脉冲信号的频率可以用软件延时和硬件中断两种方法来确定。 采用软件延时,一般是根据所需的时间常数来设计一个子程序,该程序包含一定 的指令,设计者要对这些指令的执行时间进行严密的计算或者精确的测试,以便确 定延时时间是否符合要求。每当延时子程序结束后,可以执行下面的操作,也可用 输出指令输出一个信号作为定时输出。采用软件定时, CPU一直被占用,因此CPU 利用率低。 可编程的硬件定时器直接对系统时钟脉冲或某一固定频率的时钟脉冲进行计 数,计数值则由编程决定。当计数到预定的脉冲数时,产生中断信号,得到所需的延 时时间或定时间隔。由于计数的初始值由编程决定,因而在不改动硬件的情况下, 只通过程序变化即可满足不同的定时和计数要求,因此使用很方便。
步进电机工作原理及控制电路

//按键标志变量
flag1=0;
//步进数标志变量
init();
//液晶初始化子程序
while(1)
{
keyscan();
//键盘扫描子程序
if(flag==1)
{
zz();
//正转子程序
}
else if(flag==3) {
fz(); } writebjs(8,count); } }
//反转子程序
it 动机正转,其励磁顺序如图所示。若励磁信号反向传送,则步进电动机反转。励
磁顺序: A→AB→B→BC→C→CD→D→DA→A
A-B 表4.3 1-2 相励磁法
步进电动机的负载转矩与速度成反比,速度愈快负载转矩愈小,当速度快至 其极限时,步进电动机即不再运转。所以在每走一步后,程序必须延时一段时间。 下面介绍的是国产20BY-0型步进电机,它使用+5V直流电源,步距角为18度。电 机线圈由四相组成,即A、B、C、D四相,驱动方式为二相激磁方式,电机示意图 和各线圈通电顺序如图4.2和表4.1所示:
6
法增大起动电流,以提高步进电机转动力矩,即提高其工作频率。由于步进电机
是感性负载,所以进入绕组的电流脉冲是以指数形式上升,即这时电流脉冲i为:
i = IH (1 − e−1/Tj )
(4.4)
公式
其中:i是电流脉冲瞬时值;
IH 是在开关回路电压为u时的电流稳态值;
Tj 是开关回路的时间常数,Tj = L / ( RL + RC )
θ s = 2Π / Nrk
公式(4.1) 或
θ s = 360o / Nrk
公式(4.2)
其中:k是步进电机工作拍数,Nr是转子的齿数。
步进电机运动规律及速度控制方法
步进电机运动规律及速度控制方法姓名:吴良辰班级:10机设(2)学号:201010310206学期我们专业开设了机电传动控制这么课,它是机电一体化人才所需要知识结构的躯体,由于电力传动控制装置和机械设备是一个不可分割的整体,所以我么能从中了解到机电传动控制的一般知识,要掌握电机、电器、晶闸管等工作原理、特性、应用和选用的方法。
了解最新控制技术在机械设备中的应用。
在现代工业中,机电传动不仅包括拖动生产机械的电动机,而且还包括控制电动机的一整套控制,以满足生产过程自动化的要求。
也就是说,现代机电传动是和各种控制元件组成的自动控制系统联系在一起。
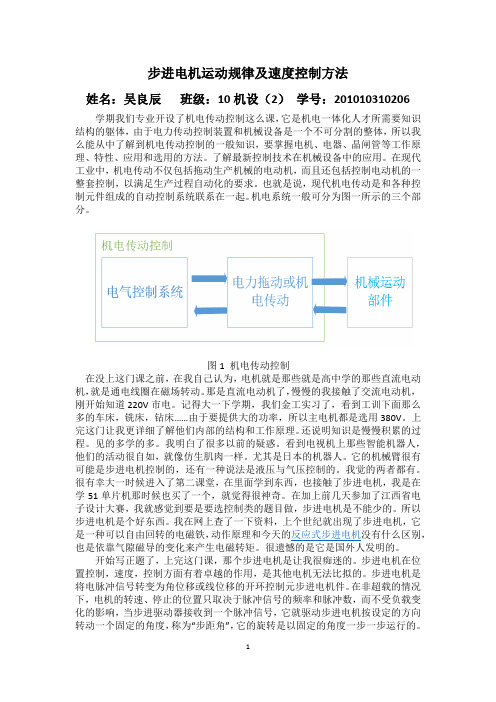
机电系统一般可分为图一所示的三个部分。
图1 机电传动控制在没上这门课之前,在我自己认为,电机就是那些就是高中学的那些直流电动机,就是通电线圈在磁场转动。
那是直流电动机了,慢慢的我接触了交流电动机,刚开始知道220V市电。
记得大一下学期,我们金工实习了,看到工训下面那么多的车床,铣床,钻床……由于要提供大的功率,所以主电机都是选用380V。
上完这门让我更详细了解他们内部的结构和工作原理。
还说明知识是慢慢积累的过程。
见的多学的多。
我明白了很多以前的疑惑。
看到电视机上那些智能机器人,他们的活动很自如,就像仿生肌肉一样。
尤其是日本的机器人。
它的机械臂很有可能是步进电机控制的,还有一种说法是液压与气压控制的。
我觉的两者都有。
很有幸大一时候进入了第二课堂,在里面学到东西,也接触了步进电机,我是在学51单片机那时候也买了一个,就觉得很神奇。
在加上前几天参加了江西省电子设计大赛,我就感觉到要是要选控制类的题目做,步进电机是不能少的。
所以步进电机是个好东西。
我在网上查了一下资料,上个世纪就出现了步进电机,它是一种可以自由回转的电磁铁,动作原理和今天的反应式步进电机没有什么区别,也是依靠气隙磁导的变化来产生电磁转矩。
很遗憾的是它是国外人发明的。
开始写正题了,上完这门课,那个步进电机是让我很痴迷的。
电气控制技术 (4)

任务三 交流伺服电动机及其控制器的使用与故障排除
交流伺服电动机是自动控制系统中的一种执行元件。通过这一工作任务的训练,
熟悉交流伺服电动机的结构,掌握交流伺服电动机的选择方法,学会交流伺服电动
机及其控制器的使用方法,进一步学会交流伺服电动机及其控制器的接线与故障排 除方法。
பைடு நூலகம்
相关资讯
• 交流伺服电动机结构类似单相异步电动机,在定子铁心槽内嵌放两相绕组, 一个是励磁绕组Nf ,由给定的交流电压Uf以励磁;另一个是控制绕组Nc,输 入交流控制电压Uc。
2
相关资讯 三、步进电动机绕组的连接
图
步进电机控制器结构
2
相关资讯 三、步进电动机绕组的连接
步进电动机与控制器的使用
图 步进电机与控制器接线示意图
2
任务实施 1.目的要求
• 掌握步进电动机及控制器的使用与 检修方法。
2.步进电动机与控制器的接线
• (1)连接步进电动机电源接线: • (2)接线面板中的轴专用信号 “HOME,LIMIT+, LIMIT-, OVCC, OGND”分别和运动控制器接线板中 的“HOME,LIMIT+, LIMIT-, OVCC, OGND”信号相连。 • (3)将“+5V,DIR+,PUL+”信号 与控制器面板的接线相连。 • (4)接线,确认无误后,给系统 上电。 • (5)步进电动机的控制
4.注意事项
• (1)微型直流伺服电动机允许带负 载启动,但不允许长时间运行在堵 转状态。 • (2)对永磁式直流伺服电动机,在 使用时应避免受到过大浪涌电流的 冲击,即使这种浪涌脉冲持续时间 仅为微秒级,也可能导致主磁极去 磁,使电动机失去原有的特性。 • (3)拆卸永磁式伺服电动机时,应 当用铁磁材料把永磁磁极短路,以 防退磁而影响电动机的性能。
第3章 步进电动机的控制-1

这种反应式步进电动机的步距角较大,不适合一般用途的要求。
4.小步距角步进电动机
图3-1所示为三相反应式步进电动机。设m为相数,z为 转子的齿数则齿距:
tb 360 z
因为每通电一次(即运行一拍),转子就走一步,各 相绕组轮流通电一次,转子就转过一个齿距。故步距角:
b
齿距 拍数 齿距 Km 360 Km z
通电方式: 从一相通电改换成另一相通电,即通电方式改变一次叫 “一拍”。步进电动机有单相轮流通电、双相轮流通电和单 双相轮流通电的方式。
3.多段反应式步进电机结构及工作原理
前面介绍的单段反应式步进电机是按 径向分相的,此外,还有一种反应式 步进电机是按轴向分相,这种步进电 机又称为多段反应式步进电机。 多段反应式步进电机是沿轴向分成磁 性相对独立的几段,每一段都有一组 励磁绕组,形成一相,因此,三相电 动机有三段,其结构如图3-2所示。 图3-2 三段三相反应式步进电动 机结构原理图
一、步进电动机的种类
1.按运动方式来分:分为旋转运动、直线运动、平面运动(印刷绕组式)和 滚切运动式步进电机。 2.按工作原理来分:分为反应式(磁阻式)、电磁式、永磁式、永磁感应式 (混合式)步进电机。 3.按其工作方式来分:分为功率式和伺服式。前者输出转矩较大,能直接带 动较大的负载;后者输出转矩较小,只能带动较小的负载,对于大负载需通 过液压放大元件来传动。 4.按结构来分:分为单段式(径向式)、多段式(轴向式)、印刷绕组式。 5.按相数来分:分为三相、四相、五相、六相等。 6.按使用频率来分:分为高频步进电机和低频步进电机。 不同类型步进电机其工作原理、驱动装臵也不完全一样,但其工作过程 基本是相同的。
(3-2)
若通电方式和系统的传动比已初步确定,则步距角应满足:
第九章-步进电动机传动控制系统

是电机作单步运动
所能带动的极限负载,也称为极限启动转矩。实际电机所 带的负载转矩TL必须小于极限启动转矩才能运行,即电机 所带负载的阻转矩 TL<
Tst
步距角减少可使相邻矩角特性位移减少, 就可提高极限
启动转矩Tst,增大电机的负载能力。三相六拍时,矩角特
性幅值不变,而步距角小了一半,故极限启动转矩。
(b) (c) 图 三相六拍运行 (a) A相通电; (b) A、 B相通电;(c) B相通电 第8 页
(a)
③三相双三拍运行
通电方式AB→BC→CA→AB‥,一拍转过30 °。
9
步进电动机的结构
10
转子齿数 齿距角
z表示.
转子相邻两齿间的夹角,用θ z 表示。 z 拍和步距角
Tst 时,A相通电时,转子处于a”点;改由B相通电 情况2:负载转矩 TL
时,转子不能前进。
图9.6 最大负载能力的确定
25
•最大负载转矩(起动转矩)
步进电动机在步进运行时所能带动的最大负载,可由相邻
Tst
两条矩角特性交点所对应的电磁转矩
相邻矩角特性的交点所对应的转矩
Tst
来确定。
T A T sm sin e
则B通电时,距角特性为
T B T sm sin( e 120 )
图 A相、B相定子齿相对转子齿的位置
21
当A、B两相同时通电时合成矩角特性应为
T A B T A T B T sm sin e T sm sin( e 120 ) T sm sin( e 60 )
使各相电流平衡。
VD2及Rf2作用是构成续流电路。
这种电源效率较高,起动和运行频 率也比单一电压型电源要高。
第3章步进电动机的控制
升速 恒速 减速 低速
起点
终点
(时间) t
图3-24
点、位控制中的加减速控制
15
变速控制的方法有:
改变控制方式的变速控制:最简单的变速控制可利用改变步进电 机的控制方式实现。例如:对于三相步进电机系统,启动或停止时 用三相六拍,大约0.1s以后,改用三相三拍,快到达终点时再采用 三相六拍,以达到减速控制的目的。 均匀地改变脉冲时间间隔的变速控制:步进电机的加速(或减速) 控制,可以用均匀地改变脉冲时间间隔来实现。 采用定时器的变速控制:单片机控制系统中,用单片机内部的定 时器来提供延时时间。方法是将定时器初始化后,每隔一定的时间, 由定时器向CPU申请一次中断,CPU响应中断后,便发出一次控制脉 冲。此时只要均匀地改变定时器时间常数,即可达到均匀加速(或 减速)的目的。这种方法可以提高控制系统的效率。
脉冲 方向控制
步进控制器
功率放大器
步进电机
负载
图3-19 步进电机控制系统的组成
2
随着电子技术的发展,除功率驱动电路之外,其它硬件电路均可由软 件实现。采用计算机控制系统,由软件代替步进控制器,不仅简化了 线路,降低了成本而且可靠性也大为提高,同时,根据系统的需要可 灵活改变步进电机的控制方案,使用起来很方便。典型的微型机控制 步进电机系统原理图如图3-20所示。 使用微型机对步进电机进行控制有串行和并行两种方式。 步 进 电 机
6
二、步进电动机的闭环控制
在开环步进电动机系统中,电动机的输出转矩在很大程度上取决于驱 动电源和控制方式。对于不同的步进电动机或同一种步进电动机而不 同负载,励磁电流和失调角发生改变,输出转矩都会随之发生改变, 很难找到通用的控速规律,因此,也很难提高步进电机的技术指标。 闭环系统是直接或间接地检测转子的位置和速度,然后通过反馈和适 当处理自动给出驱动脉冲串。因此采用闭环控制可以获得更精确的位 置控制和更高、更平稳的转速,从而提高步进电动机的性能指标。 步进电动机的输出转矩是励磁电流和失调角的函数。为了获得较高的 输出转矩,必须考虑到电流的变化和失调角的大小,这对于开环控制 来说是很难实现的。
步进电动机驱动控制原理

步进电机控制步进电动机一、步进电动机的组成和种类二、步进电动机的工作原理2.1.1B'B'C'C'这种工作方式下这种工作方式下,,三个绕组依次通电一次为一个循环周期个循环周期,,一个循环周期包括三个工作脉冲一个循环周期包括三个工作脉冲,,所以称为三相单三拍工作方式以称为三相单三拍工作方式。
按A →B →C →A →……的顺序给三相绕组轮流通电轮流通电,,转子便一步一步转动起来转子便一步一步转动起来。
每一拍转过30°(步距角步距角)),每个通电循环周期每个通电循环周期(3(3(3拍拍)转过90°(一个齿距角一个齿距角))。
2.1 2.1 步进电动机步进电动机步进电动机结构与工作原理结构与工作原理2.1.2 三相六拍按A →AB →B →BC →C →CA 的顺序给三相绕组轮流通电序给三相绕组轮流通电。
这种方式可以获得更精确的控制特性获得更精确的控制特性。
4123齿与A、A' 对齐对齐。
对齐,,又转324齿与B、B´对齐三相反应式步进电动机的一个通电循环周期如下期如下::A →AB →B →BC →C →CA ,每个循环周期分为六拍环周期分为六拍。
每拍转子转过15°(步距角步距角),),),一一个通电循环周期环周期((6拍)转子转过90°(齿距角齿距角))。
与单三拍相比与单三拍相比,,六拍驱动方式的步进角更小,更适用于需要精确定位的控制系统中更适用于需要精确定位的控制系统中。
2.1.3 三相双三拍按AB→BC→CA的顺序给三相绕组轮流通每拍有两相绕组同时通电。
电。
每拍有两相绕组同时通电。
B'C'B'C'B'C'360°电机转动的电机转动的工作原理演示工作原理演示总结总结::错齿是步进电动机旋转的根本原因齿距角是齿距角是99°;定子仍是6个磁极个磁极,,但每个磁极表面加工有五个和转子一样的齿面加工有五个和转子一样的齿。