北航adams实验报告-四足机器人
基于ADAMS的液压驱动四足机器人步态规划与仿真

tr a ba e . es l o eut eie tefaiit o eg i pa nn ds u tr ds , esv o t n dT i  ̄i rsl v r s h e bly f t at l ig a t cue ei e i h mu n f s i h n n r g n w i r ie f rn ef rh eet no h da l y n e de g e hc po d s eeec s o esl i y r i cl d r n / . h v r t co f u c i a n n
Ke r sQu d u e b tHy rui Dr e ; iPa nn ; DA yWo d : a r p dRo o ; d a l i d Gat ln ig A MS c v
ቤተ መጻሕፍቲ ባይዱ
中图分 类号 :H1 ,P 4 文 献标识 码 : T 6T 22 A
1 引言
四足机器人可以通过选择合适 的落地点 ,既能以静态 步行
机 械 设 计 与 制 造
10 0 Ma h n r De in c iey sg & M a fc u e nu a t r
第 7期 21 0 2年 7月
文章编 号:0 13 9 (0 2 0 — 10 0 10 — 9 7 2 1 )7 0 0 — 3
. T ● t ● t t
【 btat orai erbt i a n i dpait o a igo euee ruda A s c】T elet oo ̄hg l dadhg aat ly fw kn nt nvngon , r z h ho h b i l h
h da l r e udu e o o i d s nd w ohs tes u tr o s l it ad m r m t n y rui di n q arp d rb t s ei e , h a h t cue f l s e j ns n oe oi c v g r e g o o sae.nteb eo n ls tem c aia s utr , ido dao a g i i ds e n ed — pcs a O h s fa a i o h eh nc t cueakn i n ats ei da dt y ys f l r f g l g n h n m cw kn e air eq a r e b t ntego n i l e sn D MST edsl e e t a i a igb h v t u u dr o o u di s  ̄ dui A A . i a m n l oo h f d p o hr s mu g h pc Q rbtScne asteh da l y n e r i fre w l 厂 o o’ e tr m s, y rui c l d r i n oc el f o h c i dvg tecnatoc e e nte h o t reb t e cf w h
北航adams实验报告-四足机器人
成绩采用ADAMS和MATLAB建立机械装置或机电装置虚拟样机——四足机器人建模与仿真实验报告院(系)名称自动化科学与电气工程专业名称控制工程学生学号0学生姓名0指导教师02016年4月一、实验背景1. 参照自然界四足哺乳动物如猫狗的运动形式,对四足机器人进行建模,结合虚拟样机技术软件ADAMS,对四足机器人进行步态规划、运动学和动力学分析,使四足机器人模型良好运行。
2. 利用拉格朗日能量法建立四足机器人坐标系并对四足机器人进行运动学分析。
3.在Solidworks中建立四足机器人三维模型,之后将三维模型导入至虚拟样机软件ADAMS中,在ADAMS中建立虚拟样机模型,并利用样条曲线来规划机器人的运动轨迹,进行仿真,实现机器人的直线行走。
二、实验原理2.1 研究对象背景分析移动机器人按移动方式大体分为两大类;一是由现代车辆技术延伸发展成轮式移动机器人(包括履带式);二是基于仿生技术的运动仿生机器人。
运动仿生机器人按移动方式分为足式移动、蠕动、蛇行、游动及扑翼飞行等形式,其中足式机器人是研究最多的一类运动仿生机器人。
自然环境中有约50%的地形,轮式或履带式车辆到达不了,而这些地方如森林,草地湿地,山林地等地域中拥有巨大的资源,要探测和利用且要尽可能少的破坏环境,足式机器人以其固有的移动优势成为野外探测工作的首选,另外,如海底和极地的科学考察和探索,足式机器人也具有明显的优势,因而足式机器人的研究得到世界各国的广泛重视。
现研制成功的足式机器人有1足,2足,4足,6足,8足等系列,大于8足的研究很少。
曾长期作为人类主要交通工具的马,牛,驴,骆驼等四足动物因其优越的野外行走能力和负载能力自然是人们研究足式机器人的重点仿生对象。
因而四足机器人在足式机器人中占有很大的比例,四足机器人的研究深具社会意义和实用价值。
2.2 研究对象数学模型分析四足机器人整体结构由躯体、左前腿、右前腿、左后腿、右后腿五部分组成。
四足机器人的设计为两腿包含两个关节,分别为髋关节和膝关节,在关节位置添加驱动,这两个驱动为主动自由度,小腿为被动自由度。
基于ADAMS的四足机器人上下坡运动仿真
基于 A D A M S的 四足 机 器人 上 下坡 运动 仿 真
马 宗利 ,王建 明,李华 ,赵彦 ,刘延俊
( 山 东大学机械 学 院 ,山 东济 南 2 5 0 0 6 1 )
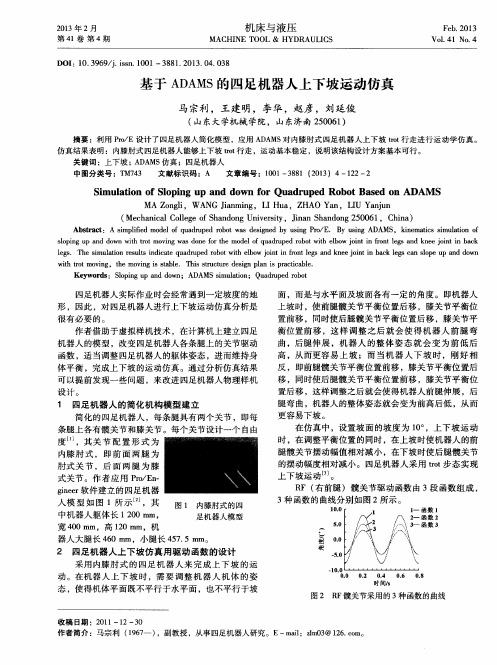
摘要 :利用 P m/ E设计 了四足机器人 简化模型 ,应用 A D A MS 对 内膝肘 式 四足机器人 上下坡 t r o t 行走进行 运动学仿 真。 仿真结果表明 :内膝肘 式四足机器人 能够 上下坡 t r o t 行走 ,运动基本稳定 ,说 明该结构设计方案基本可行 。 关键词 :上下坡 ; A D A M S仿真 ;四足机器人 中图分类号 :T M 7 4 3 文献标 识码 :A 文章编 号 :1 0 0 1 — 3 8 8 1( 2 0 1 3 )4— 1 2 2— 2
S i mu l a t i o n o f S l o p i n g u p a n d d o w n f o r Qu a d r u p e d R o b o t B a s e d o n AD A MS
MA Z o n g l i ,WA N G J i a n m i n g ,L I Hu a ,Z H A 0 Y a n ,L I U Y a n j u n ( Me c h a n i c a l C o l l e g e o f S h a n d o n g U n i v e r s i t y ,J i n a n S h a n d o n g 2 5 0 0 6 1 ,C h i n a )
l e g s .T h e s i m u l a t i o n r e s u l t s i n d i c a t e q u a d up r e d r o b o t w i t h e l b o w j o i n t i n f r o n t l e g s a n d k n e e j o i n t i n b a c k l e g s c a n s l o p e u p a n d d o w n
基于ADAMS平台的四足机器人越障仿真与测试
d o i :1 0 . 1 1 8 2 3 / j . i s s n . 1 6 7 4— 5 7 9 5 . 2 0 1 4 . 0 3 . 0 5
理论 与 实践
・ 1 9・
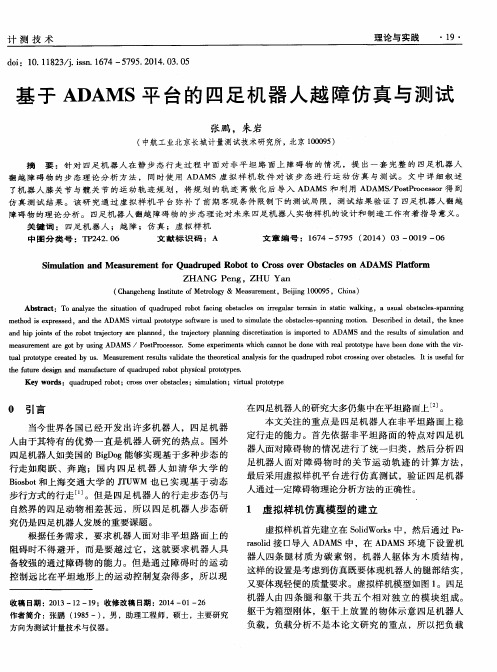
基于 A DA MS平 台 的 四 足 机 器 人 越 障 仿 真 与 测 试
张鹏 ,朱岩
S i mu l a t i o n a n d Me a s u r e me n t f o r Qu a d r u p e d Ro b o t t o C r o s s o v e r Ob s t a c l e s o n AD A MS P l a t f o r m
ZH ANG Pe ng.ZHU Ya n
( C h a n g c h e n g I n s t i t u t e o f Me t r o l o g y& Me a s u r e m e n t , B e i j i n g 1 0 0 0 9 5 ,C h i n a )
nd a h i p j o i n t s o f he t r o b o t t r a j e c t o r y r a e p l nn a e d , t h e t r a . " e c t o y r p l a n n i n g d i s c r e t i z a t i o n i s i m p o t r e d t o A D A MS nd a t h e r e s u l t s f o s i mu l a t i o n a n d
me a s u r e me n t a r e g o t b Y u s i n g ADAMS/ P o s t P oc r e s s o r .S o me e x p e i r me n t s wh i c h c a n n o t b e d o n e w i h t r e l a p r o t o t y p e h a v e b e e n d o n e w i t h he t v i r - t u l a p r o t o t y p e c r e a t e d b y U S . Me a s u r e me n t r e s u l t s v li a d a t e he t he t o r e t i c l a na a ly s i s f o r t h e q u a d up r e d r o b o t c r o s s i n g o v e r o b s t a c l e s .I t i s u s e f u l f o r
《2024年一种新型四足仿生机器人性能分析与仿真》范文
《一种新型四足仿生机器人性能分析与仿真》篇一一、引言四足仿生机器人是一种以自然界生物为蓝本,具有高度仿生学和动态稳定性的机器人技术。
随着科技的不断发展,新型四足仿生机器人的设计与研究越来越受到重视。
本文旨在深入分析一种新型四足仿生机器人的性能,并通过仿真实验来验证其设计及功能实现的可行性。
二、新型四足仿生机器人设计与技术概述该新型四足仿生机器人设计采用了先进的机械结构设计、高性能的驱动系统和精确的控制系统。
机器人具备高度仿真的四足运动能力,能够在复杂地形中实现稳定行走和灵活运动。
此外,该机器人还具备较高的环境适应性,能够在不同环境下进行作业。
三、性能分析1. 运动性能:该新型四足仿生机器人采用先进的运动控制算法,使机器人能够快速、准确地完成各种动作。
在复杂地形中,机器人能够保持动态平衡,实现稳定行走。
此外,机器人还具备快速反应能力,能够在短时间内完成紧急动作。
2. 负载能力:该机器人具备较高的负载能力,能够在不同环境下承载重物进行作业。
通过优化机械结构和驱动系统,提高了机器人的负载能力,从而拓宽了其应用范围。
3. 环境适应性:该机器人具备较高的环境适应性,能够在多种环境中进行作业。
例如,在室外环境中,机器人能够应对不同的地形和气候条件;在室内环境中,机器人能够进行精确的定位和操作。
4. 能源效率:采用高效能电池和节能控制算法,使机器人在保证性能的同时,实现了较低的能源消耗。
这有助于延长机器人的工作时间,提高其使用效率。
四、仿真实验为了验证该新型四足仿生机器人的性能,我们进行了仿真实验。
仿真实验中,我们模拟了不同地形和环境条件,对机器人的运动性能、负载能力和环境适应性进行了测试。
实验结果表明,该机器人在各种环境下均能实现稳定行走和灵活运动,且具备较高的负载能力和环境适应性。
此外,机器人的能源效率也得到了显著提高。
五、结论通过对一种新型四足仿生机器人的性能分析与仿真实验,我们得出以下结论:1. 该机器人具备高度仿真的四足运动能力,能够在复杂地形中实现稳定行走和灵活运动。
基于ADAMS和Pro/MECHANICA的四足步行机器人机身底板的优化设计
C HANI A 的 结 合 可 以 有 效 地 提 高优 化 设 计 的 效 率 。 C 关 键词 : 器人 ; 机 四足 ; r/ P o MEC HAN C ADAMS; 化 设 计 ; 板 I A; 优 底
中图分 类号 :G 5 T 6
文献 标识 码 : A
Op i z d Dein o e B c pa eo a r p d W akn b tBae n ADAMS a d P o MECHANI t e sg ft a k ln fQu d u e lig Ro o sd o mi h n r/ CA
Pr /M o ECH AN I CA .S u y h s pr v d t tt e w a ih t e c m bia i n o DA M d Pr /M t d a o e ha h y w t h o n to fA Sa o n ECHAN I - CA a n a c f ce c f o i a e i . cn e h n e e in y o pt i m ld sg n
静 态分析 , 通过 灵敏 度 分析 确定 底板 的 重要设 计 参数 。以质 量 最 轻 为 目标 函数 , 满 足 工作 状 态 强度 的 在 条件下, 完成 了底 板 结 构 的优 化设 计 , 实现 了对 该 零 件 的 轻 量 化 设 计 。 研 究表 明 , D S和 Po ME A AM r / —
四足机器人研究报告
四足机器人研究报告
报告摘要:
本报告对四足机器人的研究进行了综合分析和评估。
首先介绍了四足机器人的发展历程和应用领域,并分析了目前研究的热点和难点。
然后,报告针对四足机器人的运动控制、感知和导航、智能算法等关键技术进行了深入探讨。
在运动控制方面,研究重点是如何实现高效稳定的步态控制和机器人姿态调整。
在感知和导航方面,研究重点是如何实现机器人对环境的感知和理解,以及路径规划和避障等导航任务。
在智能算法方面,研究重点是如何通过机器学习和人工智能等方法,提升四足机器人的智能水平和自主决策能力。
报告同时对国内外四足机器人研究的进展和成果进行了梳理和总结。
指出了目前四足机器人研究存在的问题和挑战,例如机器人的能源管理、机械结构的优化、系统的鲁棒性等。
最后,报告对未来四足机器人研究的发展趋势进行了展望,提出了一些可能的解决方案和研究方向,包括机器人的智能化、机器人的多任务协同、机器人的实时学习等。
综上所述,四足机器人研究具有广阔的应用前景和深远的意义。
然而,要实现四足机器人的高效稳定运动和智能决策,需要进一步攻克一系列技术难题。
相信在不久的将来,随着技术的不断突破和研究的不断深入,四足机器人必将在各个领域展现出更广阔的应用潜力。
四足机器人的动力学分析与仿真
四足机器人的动力学分析与仿真张锦荣1,王润孝2(1长安大学,西安 710064,2西北工业大学,西安 710072)摘要:针对四足机器人的结构特点,利用拉格朗日法导出其简化结构多刚体系统的动力学方程组。
同时利用ADAMS建立了四足机器人的虚拟样机,采用规划好的步态,对其进行动力学仿真,仿真结果验证了动力学数学建模的正确性及结构设计的可行性,为提升控制品质的后续研究工作提供有价值的数据信息。
关键词:四足机器人;动力学;仿真Dynamic analysis and simulation on quadruped robotZhang Jinrong1,Wang Runxiao2(Chang'an University,Xi an 7100764;Northwestern Polytechnical University,Xi an 710072) Abstract: Based on the structural characteristics of quadruped robot, dynamic equation group for simplified-structure of the quadruped robot’s multi-rigid body system is educed using Lagrange principle. A virtual prototypes is established using ADAMS, and simulated in using its planned gait. Simulation results tested the exactness of dynamics model and the rationality of structure design as well as provide valuable data information for further research on improving control quality of the quadruped robot.Key word: quadruped robot; dynamics; simulation与传统的轮式、履带式机器人相比,四足机器人有很强的环境适应性和运动灵活性,既可以进入相对狭窄的空间,也可以跨越障碍、上下台阶、上下斜坡甚至在不平整地面上运动,因此,对四足机器人的研究已成为机器人研究领域的重要课题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
成绩采用ADAMS和MATLAB建立机械装置或机电装置虚拟样机——四足机器人建模与仿真实验报告院(系)名称自动化科学与电气工程专业名称控制工程学生学号0学生姓名0指导教师02016年4月一、实验背景1. 参照自然界四足哺乳动物如猫狗的运动形式,对四足机器人进行建模,结合虚拟样机技术软件ADAMS,对四足机器人进行步态规划、运动学和动力学分析,使四足机器人模型良好运行。
2. 利用拉格朗日能量法建立四足机器人坐标系并对四足机器人进行运动学分析。
3.在Solidworks中建立四足机器人三维模型,之后将三维模型导入至虚拟样机软件ADAMS中,在ADAMS中建立虚拟样机模型,并利用样条曲线来规划机器人的运动轨迹,进行仿真,实现机器人的直线行走。
二、实验原理2.1 研究对象背景分析移动机器人按移动方式大体分为两大类;一是由现代车辆技术延伸发展成轮式移动机器人(包括履带式);二是基于仿生技术的运动仿生机器人。
运动仿生机器人按移动方式分为足式移动、蠕动、蛇行、游动及扑翼飞行等形式,其中足式机器人是研究最多的一类运动仿生机器人。
自然环境中有约50%的地形,轮式或履带式车辆到达不了,而这些地方如森林,草地湿地,山林地等地域中拥有巨大的资源,要探测和利用且要尽可能少的破坏环境,足式机器人以其固有的移动优势成为野外探测工作的首选,另外,如海底和极地的科学考察和探索,足式机器人也具有明显的优势,因而足式机器人的研究得到世界各国的广泛重视。
现研制成功的足式机器人有1足,2足,4足,6足,8足等系列,大于8足的研究很少。
曾长期作为人类主要交通工具的马,牛,驴,骆驼等四足动物因其优越的野外行走能力和负载能力自然是人们研究足式机器人的重点仿生对象。
因而四足机器人在足式机器人中占有很大的比例,四足机器人的研究深具社会意义和实用价值。
2.2 研究对象数学模型分析四足机器人整体结构由躯体、左前腿、右前腿、左后腿、右后腿五部分组成。
四足机器人的设计为两腿包含两个关节,分别为髋关节和膝关节,在关节位置添加驱动,这两个驱动为主动自由度,小腿为被动自由度。
因此四足机器人整体包含4个髋关节自由度、4个膝关节自由度、以及4个小腿位置的被动自由度。
选其中一条腿进行动力学分析。
机器人动力学分析常用的方法有牛顿-欧拉方程和拉格朗日法。
拉格朗日法是一种功能平衡法,它只需要速度而不必求内作用力,是一种直截了当和简便的方法。
利用拉格朗日法来分析和求解了三自由度步行足的动力学方程。
四足机器人的肢体结构如图2.1所示,侧摆关节在YOZ 平面转动, 1m 、2m 和3m 分别为侧摆、大腿和小腿的质量,且以腿末端的点质量表示, 1θ、2θ和3θ是关节转角,g 为重力加速度。
图2.1 四足机器人的肢体结构机械系统的拉格朗日动力学方程为i P i K i K q E q E q E dt d ∂∂+∂∂-∂∂= i T (1) 式(1)中,K E 为系统的总动能,P E 为系统的总势能,i q 是为关节的角度坐标,i q为关节的角速度,i T 称为关节力矩。
杆件i 质心的线速度和角速度可表示成:q J q J q J i L i i Li i L =++=11i v (2)q J q J q J i A i i Ai i A =++=11i ω (3)式(2)、式(3)中Li J 和Ai J 分别是与第i 个连杆重心位置的平移速度和转动速度相关的雅可比矩阵,则:系统的平动动能 ∑==n i i L T i L T i K q J J q m E 1)()(121 (4) 系统的转动动能 ∑==n i i A i T i A T K q J I J q E 1)()(221 (5) 系统的总动能为平动动能和转动动能之和,为∑=+=+=n i i A i T i A T i L T i L T i K K K q J I J q q J J q m E E E 1)()()()(21)(21 q H q T 21= (6) 式(6)中H 由公式(7)获得∑=+=n i i A i T i A i L T i L iJ I J J J m H 1)()()()()( (7)系统的总势能为: i ni T i p r g m E ,01∑== (8)式(8)式中的i r ,0是第i 根杆件的质心在参考坐标系中的位置由(1)、(6)、(8)式,得各关节力矩j Li n j nj T j n k k j ijk n j j ij J g m q q h q H∑∑∑∑====++=1111i T (9) 式(9)中,i jk k ijijk q H q H h ∂∂-∂∂=5.0 (10)2.3 ADAMS 专项技术原理分析在 ADAMS 中建立模型的方法有2种:一种是利用ADAMS 自己的零件库建立虚拟样机模型;一种是在其他三维建模软件建立模型,导入到ADAMS中,通过添加约束、运动函数和力等建立虚拟样机模型。
虽然ADAMS有强大的仿真分析功能,但在实体建模功能比较薄弱,因此采用第2种方法,即在SolidWorks中建立三维模型,保存为*.x_t格式再导入(import)到ADAMS中。
再加上相应的驱动和约束,就能实现模型在ADAMS中的仿真。
研究的四足机器人的足部结构为面接触式,同时抬起2条腿足以保证其稳定性,因此,在提高机器人爬行速度的考虑下,规划了机器人的爬行步态为以对角线的2条腿同时抬起行走;机器人重心在地面投影为直线;抬腿过程中,脚底板始终与地面平行;运动过程中四足爬行机器人机体始终保持与地面平行。
这种步态可以在保证机器人平稳行走的同时,提高机器人的行走速度及效率。
在1个周期内,机器人相当于迈步2次。
机器人腿部抬起向前摆动,落地时通过脚面摩擦力使2条腿恢复原状同时带动机器人向前位移,2条腿同时抬起、同时恢复原位的方案也可以大大提高向前的动力。
根据四足机器人的独立驱动参数能够计算机体的运动位置和速度。
机器人四条腿依次“抬起一摆动一放下”构成一个步态周期,一个步态周期需要分成若干个阶段以对应于每条腿“抬起一摆动一放下”。
需要合理控制每条腿来保证行走的稳定性。
基于MATLAB建立其逆运动学分析运动曲线,将MATLAB生成的各个关节的变化曲线作为四足爬行机器人虚拟样机上各个相应舵机的输入量来控制舵机的变化,所以将MATLAB中得到的关节运动轨迹进行离散化,离散后的数据保存为文本文件。
将离散后的数据(选择输入的.txt文件格式为TextData格式)导入到ADAMS中生成样条曲线(Spline)指定到相应的关节驱动中,这样,机器人各个关节就能够按照规划的轨迹运动。
2.4 ADAMS建模过程1.三维建模首先根据模型的相关尺寸在SolidWorks中建立四足机器人的零件进行三维模型,并最后装配成一个装配体。
如图2.2所示。
图2.2 四足机器人三维模型然后保存在自己指定的目录(英文目录)下,文件名自定义,这里我定义为robotWmy1223,注意保存格式为parasolid(*.x_t),点击确定。
打开adams,进入界面后在菜单栏点击[file/import],然后选择File Type为Parasolid(*.xmt_txt,*.x_t…),在File To Read中双击选择自己之前保存的目录(英文目录),File Type不用管,在Model Name右边栏目里右键,依次点击[Model/Create],然后点击ok,再点击ok。
选择钢铁为模型的主要材料,ADAMS软件会自动为各个部件生成相应的质量、质心、转动惯量等其他相关参数。
定义完成后的模型如图2.3所示。
图2.3 定义材料属性之后2.调整工作网格调整网格宽度为750mm×500mm,网格间距为50mm×50mm,调整方向为YZ平面,使工作网格与四足机器人躯体平行,便于后期添加约束。
添加质量后,要设置重力大小及方向。
重力大小设置为标准重力9.85,方向沿着Y轴负方向。
3.添加约束和驱动在躯体和髋关节处添加固定约束,保证髋和躯体同步运动。
在髋关节添加旋转约束,保证大腿绕躯体旋转;在膝关节处添加旋转约束,保证小腿绕大腿旋转。
添加一块2000 X 100mm的板作为地面,在板与地面之间添加固定约束,使板固定于地面上。
在髓关节和膝关节的旋转约束上添加旋转驱动,作为四足机器人的动力。
4.建立状态变量膝关节和骸关节总共有八个驱动,与之相对应要建立八个状态变量。
从build菜单中选择system elements,再选择state variable选项,创建8个变量,分别命名为RHKV,LHKV,RFKV,LFKV,RHHV,LHHV,RFHV,LFHV。
状态变量建立完成之后,要将这8个状态变量与驱动相关联。
将MATLAB 中得到的关节运动轨迹进行离散化,离散后的数据保存为文本文件。
将离散后的数据(选择输入的.txt文件格式为TextData格式)导入到ADAMS中生成样条曲线(Spline)指定到相应的关节驱动中。
在ADAMS中的模型上创建motion的位置,打开各个motion进行修改,选择样条函数CUBSPL( time , 0 , LFx3, 0)。
5.接触力及摩擦力设定足端与地面间断性接触,产生了接触力和摩擦力,使得四足机器人正常前进,并对稳定性有相当大的影响。
所以对四个足端与地面进行力设置。
接触力设定采用solid to solid,采用基于碰撞函数的接触算法Impact计算接触力,参数设定如图2.4。
图2.4 接触力参数设定三、实验过程与结果3.1 仿真过程打开simulation仿真参数设置,设置结束时间为5s,步长为0.01,点击start 进行仿真。
3.2 实验结果四足机器人基本能稳定地向前行走,由于与地面之间存在一定的滑动,所以行走路线偏移了规划好的直线。
四、结果分析与实验结论1. 观察膝关节和髋关节的运动曲线如图3.1所示(以左前腿LF为例)。
图3.1 膝关节和髋关节角位移可知:1)行走的过程中,同一腿的髋关节、膝关节具有固定的相位关系;基本上膝关节优先于髋关节半个周期;2)腿在摆动相时,髋关节前摆,髋关节和膝关节同步运动。
2.质心坐标变化如下图3.2 质心的X坐标变化曲线图3.3 质心的Y坐标变化曲线图3.4 质心的Z坐标变化曲线由质心坐标的运动曲线可知,四足机器人基本上保持400mm/s的速度,由于步态和先后抬腿的原因,质心向X方向会出现左右摆,Y方向出现上下摆,基本上可以判定四足机器人的运动比较稳定。
结论:对四足哺乳类动物观察、测量,建立了简化的四足机器人结构模型,确定了初始结构参数;对四足机器人关节运动进行轨迹规划,并利用ADAMS软件建立四足机器人的虚拟样机,在可视化仿真的基础上观察四足机器人行走过程,使结构设计方案和运动学分析得到了充分的验证。