武汉理工大学机械原理复习
武汉理工大学考研《机械原理》往年内部综合测试

《机械原理》综合测试综合测试一一、填空、选择题(15分)1、设螺纹的升角为λ,接触面的当量摩擦系数为v f,则螺旋副自锁的条件是.2、在设计滚子从动件盘状凸轮廓线时,若发现工作廓线有变尖现象,则在尺寸参数改变上应采取的措施是3、基本杆组的自由度应为。
(A) -1 ; (B) +1 ; (C) 12R 。
4、对心曲柄滑块机构以曲柄为原动件时,其最大传动角γ为。
A)α;B)45 ;C)ω1。
5、曲柄滑块机构是改变曲柄摇杆机构中的而形成的。
在曲柄滑块机构中改变而形成偏心轮机构。
在曲柄滑块机构中以而得到回转导杆机构。
6、高副低代中的虚拟构件及其运动副的自由度应为。
(A) v5; (B) +1 ; (C) 0 ; (D) 6。
7、对于绕固定轴回转的构件,可以采用的方法使构件上所有质量的惯性力形成平衡力系,达到回转构件的平衡。
若机构中存在作往复运动或平面复合运动的构件应采用方法,方能使作用于机架上的总惯性力得到平衡。
8、渐开线齿廓的形状完全取决于。
9、为了减少飞轮的质量和尺寸,应将飞轮安装在轴上。
10、蜗轮的螺旋角应蜗杆的升角,且它们的旋向应该11、图示4 个分图中,图所示构件系统是不能运动的。
二、(15分)计算图示机构的自由度,拆杆组并确定机构的级别,如有复合铰链、局部自由度和虚约束,需明确指出。
画箭头的构件为原动件。
图中DE | |FG。
L三、(10分)一对心直动尖顶从动件偏心圆凸轮机构,O为凸轮几何中心,O1为凸轮转动中心,直线rM⊥BD,O1O=0。
5OA,圆盘半径R=60 mm。
(1)根据图a及上述条件确定基圆半径r0、行程h,C点压力角ϕ和D点接触时的位移d M、压力角αD。
(2)若偏心圆凸轮几何尺寸不变,仅将从动件由尖顶改为滚子,见图b,滚子半径z 115=mm。
试问上述参数z230=、h、z z2430==和z540=、z620=有否改变?如认为没有改变需明确回答,但可不必计算数值;如有改变也需明确回答,并计算其数值。
机械原理基础知识点总结,复习重点
机械原理知识点总结第一章平面机构的结构分析3一. 基本概念31. 机械: 机器与机构的总称。
32. 构件与零件33. 运动副34. 运动副的分类35. 运动链36. 机构3二. 基本知识和技能31. 机构运动简图的绘制与识别图32.平面机构的自由度的计算及机构运动确定性的判别33. 机构的结构分析4第二章平面机构的运动分析6一. 基本概念:6二. 基本知识和基本技能6第三章平面连杆机构7一. 基本概念7(一)平面四杆机构类型与演化7二)平面四杆机构的性质7二. 基本知识和基本技能8第四章凸轮机构8一.基本知识8(一)名词术语8(二)从动件常用运动规律的特性及选用原则8三)凸轮机构基本尺寸的确定8二. 基本技能9(一)根据反转原理作凸轮廓线的图解设计9(二)根据反转原理作凸轮廓线的解析设计10(三)其他10第五章齿轮机构10一. 基本知识10(一)啮合原理10(二)渐开线齿轮——直齿圆柱齿轮11(三)其它齿轮机构,应知道:12第六章轮系14一. 定轴轮系的传动比14二.基本周转(差动)轮系的传动比14三.复合轮系的传动比15第七章其它机构151.万向联轴节:152.螺旋机构163.棘轮机构164. 槽轮机构166. 不完全齿轮机构、凸轮式间歇运动机构177. 组合机构17第九章平面机构的力分析17一. 基本概念17(一)作用在机械上的力17(二)构件的惯性力17(三)运动副中的摩擦力(摩擦力矩)与总反力的作用线17二. 基本技能18第十章平面机构的平衡18一、基本概念18(一)刚性转子的静平衡条件18(二)刚性转子的动平衡条件18(三)许用不平衡量及平衡精度18(四)机构的平衡(机架上的平衡)18二. 基本技能18(一)刚性转子的静平衡计算18(二)刚性转子的动平衡计算18第十一章机器的机械效率18一、基本知识18(一)机械的效率18(二)机械的自锁19二. 基本技能20第十二章机械的运转及调速20一. 基本知识20(一)机器的等效动力学模型20(二)机器周期性速度波动的调节20(三)机器非周期性速度波动的调节20二. 基本技能20(一)等效量的计算20(二)飞轮转动惯量的计算20第一章平面机构的结构分析一. 基本概念1. 机械: 机器与机构的总称。
机械原理复习资料(题解)
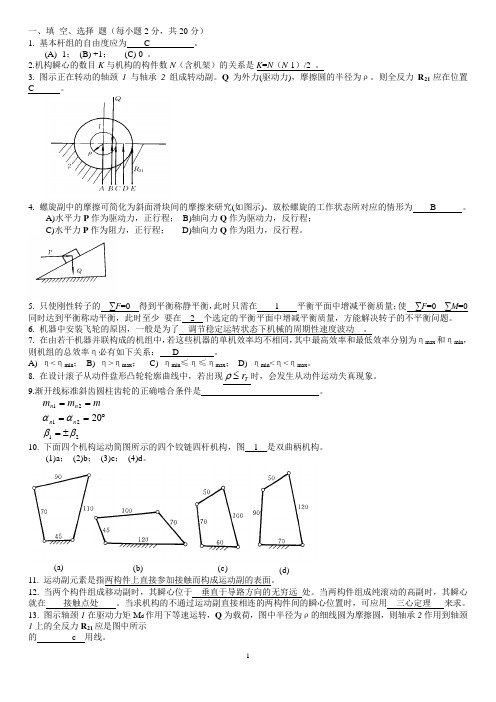
一、填 空、选择 题(每小题2分,共20分)1. 基本杆组的自由度应为 C 。
(A) -1; (B) +1; (C) 0 。
2.机构瞬心的数目K 与机构的构件数N (含机架)的关系是K =N (N -1)/2 。
3. 图示正在转动的轴颈1与轴承2组成转动副。
Q 为外力(驱动力),摩擦圆的半径为ρ。
则全反力R 21应在位置C 。
4. 螺旋副中的摩擦可简化为斜面滑块间的摩擦来研究(如图示)。
放松螺旋的工作状态所对应的情形为 B 。
A)水平力P 作为驱动力,正行程; B)轴向力Q 作为驱动力,反行程;C)水平力P 作为阻力,正行程; D)轴向力Q 作为阻力,反行程。
5. 只使刚性转子的 ∑F =0 得到平衡称静平衡,此时只需在 1 平衡平面中增减平衡质量;使 ∑F =0 ∑M =0同时达到平衡称动平衡,此时至少 要在 2 个选定的平衡平面中增减平衡质量,方能解决转子的不平衡问题。
6. 机器中安装飞轮的原因,一般是为了 调节稳定运转状态下机械的周期性速度波动 。
7. 在由若干机器并联构成的机组中,若这些机器的单机效率均不相同,其中最高效率和最低效率分别为ηmax 和ηmin ,则机组的总效率η必有如下关系: D 。
A) η<ηmin ; B) η>ηmax ; C) ηmin ≤η≤ηmax ; D) ηmin <η<ηmax 。
8. 在设计滚子从动件盘形凸轮轮廓曲线中,若出现T r ≤ρ时,会发生从动件运动失真现象。
9.渐开线标准斜齿圆柱齿轮的正确啮合条件是 。
21212120ββαα±=︒====n n n n mm m10. 下面四个机构运动简图所示的四个铰链四杆机构,图 1 是双曲柄机构。
(1)a ; (2)b ; (3)c ; (4)d 。
(a)(b)(c)(d)11. 运动副元素是指两构件上直接参加接触而构成运动副的表面。
12. 当两个构件组成移动副时,其瞬心位于 垂直于导路方向的无穷远 处。
武汉理工机械制造技术基础重点总结
武汉理工机械制造基础复习重点,市面上太贵,这个实惠.切削运动:用刀具切除工件上多余的金属,刀具和工件之间必须具有一定的相对运动,该运动称为切削运动。
切削运动包含主运动和进给运动。
主运动:使刀具和工件产生主要相对运动,以切除工件上多余金属的基本运动称为主运动。
主运动速度最高,消耗功率最大。
在车削时,工件的旋转运动是主运动;在钻削、铣削和磨削时,刀具或砂轮的旋转运动是主运动;在刨削时,刀具或工作台的往复直线运动是主运动.进给运动:与主运动配合,连续不断地切除工件上多余金属,以切削出整个工件已加工表面的运动称为进给运动。
合成切削运动:由同时进行的主运动和进给运动的合成运动称为合成切削运动。
切削用量:在切削加工过程中,需要针对不同的工件材料、刀具材料和其他加工要求来选定适宜的切削速度v、进给量f 或进给速度vf 值,还要选定适宜的背吃刀量ap 值.切削速度、进给量和背吃刀量通常称为切削用量三要素.切削速度v:它是刀刃上选定点相对于工件的主运动线速度。
当主运动是旋转运动时,切削速度由下式确定:dw—工件最大直径(mm) nw—工件主运动的转速(r/min 或r/s)。
进给量f:进给量f 是工件或刀具的主运动每转或每一行程时,两者在进给运动方向上的相对位移量.进给速度vf:进给速度vf 是刀刃上选定点相对于工件的进给运动的速度,单位为mm/s。
背吃刀量ap:对车削和刨削而言,背吃刀量ap 是工件上待加工表面和已加工表面间的垂直距离。
刀具切削部分的结构要素有三个刀面、两个刀刃和一个刀尖构成。
1)前刀面Aγ:刀具上切屑流过的表面。
2)主后刀面A2:与工件过渡表面相对的刀面。
3)副后刀面A2':与工件已加工表面相对的刀面。
4)主切削刃S:前刀面与主后刀面的交线,它承担主要的切削工作,并形成工件上的过渡表面. 5)副切削刃S':前刀面与副后刀面的交线,协助主切削刃切除多余金属,形成已加工表面。
6)刀尖:主切削刃和副切削刃相交部分。
武汉理工大学《机械设计》复习题库

2.设计一对外啮合的标准直齿圆柱齿轮传动,要求传动比 i=n1/n2=Z2/Z
a=78mm。若根据强度要求,取模数 m=3mm。采用标准齿形,齿顶高系数 ha 的齿数 Z2,Z1,并计算这对齿轮的各部分尺寸 d、 db 、da 、df 、ha s 、e 。(cos200=0.94; π滑动和打滑区别。
一直齿锥齿轮一斜齿圆柱齿轮减速器,已知 1 轮为主动轮,其转动方向如图所示。为使 II 3 轮的轴向力能相互抵消一部分,要求:确定 3、4 轮的螺旋线方向。(在图上直接标出)
II
III
13
4
I 2
n
题(共 41 分)
下图所示机构的自由度,指出局部自由度、复合铰链和虚约束,并说明机构运动是否确定(标 构件为原动件)。(7 分)
线齿轮的标准压力角为( ) 。
B 30°
C 60°
D 40°
保证 v 带与带轮的槽面很好的接触,则 V 带带轮的轮槽角( )。
B ≥ 40° C <40°
D >40°
传动的中心距大于标准中心距时,其传动比( )。
B 减小
C 不变
D 不确定
线齿轮基圆上的压力角( )。
A 是 10°
B 是 0°
C 大于分度圆上的压力角
)
5.标准正常齿轮其齿形渐开线能延伸至基圆以内。( )
6.角接触轴承既使受纯径向载荷,也会产生轴向分力。故角接触轴了必须成对
轴向力。(
)
7.行程速比系数 K 取决于极位夹角,极位夹角θ越大,行程速比系数 K 越小
8.当齿面硬度≥350HBS 时,该齿轮称为软齿面齿轮( )
9.渐开线齿轮上任一点的受力方向线一定与基圆相切( )
绕上主动轮的 D 点
(NEW)武汉理工大学《839机械原理》历年考研真题汇编(含部分答案)

2014年武汉理工大学机械原理考研真题(回忆版) 2010年武汉理工大学841机械原理考研真题(含答案) 2009年武汉理工大学404机械原理考研真题 2008年武汉理工大学841机械原理考研真题 2007年武汉理工大学404机械原理考研真题 2006年武汉理工大学404机械原理考研真题 2005年武汉理工大学404机械原理考研真题 2004年武汉理工大学404机械原理考研真题
2006年武汉理工大学404机械原理考研真题
2005年武汉理工大学404机械原理考研真题
2004年武汉理工大学404机械原理考研真题
2014年武汉理工大学机械原理考研真题 (回忆版)
2010年武汉理工大学841机械原理考研真题 (含答案)
2009年武汉理工大学404机械原来自考研真题2008年武汉理工大学841机械原理考研真题
2007年武汉理工大学404机械原理考研真题
机械原理模拟试卷2及参考答案
9.若凸轮实际轮廓曲线出现尖点或交叉,可滚子半径。
( A增大 B减小 C不变)10.平面连杆机构急回运动的相对程度,通常用来衡量。
( A 极位夹角θ B 行程速比系数K C 压力角α)二、填空题(每空1分共10分)1.标准渐开线直齿圆锥齿轮的标准模数和压力角定义在端。
2.图(a),(b),(c)中,S为总质心,图中转子需静平衡,图中转子需动平衡。
3.移动副自锁条件是,转动副自锁条件是。
4.周期性速度波动和非周期性速度波动的调节方法分别为和。
5.惰轮对并无影响,但却能改变从动轮的。
6.平面连杆机构是否具有急回运动的关键是。
三、简答题(每小题6分共24分)1.什么是运动副、低副、高副?试各举一个例子。
平面机构中若引入一个高副将带入几个约束?若引入一个低副将带入几个约束?2.何谓曲柄?铰链四杆机构有曲柄存在的条件是什么?当以曲柄为主动件时,曲柄摇杆机构的最小传动角将可能出现在机构的什么位置?3.什么是渐开线齿廓的根切现象?产生根切原因是什么?标准直齿圆柱齿轮不根切的最小齿数是多少?4.如图所示平面四杆机构,试回答:(1) 该平面四杆机构的名称;(2) 此机构有无急回运动,为什么?(3) 此机构有无死点,在什么条件下出现死点;(4) 构件AB为主动件时,在什么位置有最小传动角。
四、计算题(共36分)1、图所示穿孔式计算机中升杆和计算卡停止机构,有箭头标记的为原动件,试判断此机构运动是否确定。
(若有复合铰链、局部自由度、虚约束请指出来)(8分)2. 在电动机驱动的剪床中,作用在剪床主轴上的阻力矩M r的变化规律如图所示,等效驱动力矩M d等于常数,电动机的转速为n = 1500r/min,系统运转的不均匀系数δ≤0.05。
试求:(1)求出驱动力矩M d,作功能指示图,求最大盈亏功△W max。
(2)求安装在电动机轴上的飞轮转动惯量J F。
(8分)M e(N·m)1600200π/2 φ2π3π/43.如图所示轮系机构中,Z1=Z3=16,Z2=40,Z4=80,Z5=42,Z6=Z7=14,Z8=46,试求:(1)该轮系为何类型轮系;(2)图示轮系是如何组成的;(3)求该轮系的传动比i18。
武汉理工大学《机械原理》考试复习题库
考试复习重点资料(最新版)资料见第二页封面第1页第二章 平面机构的结构分析思考题及练习题1.何谓构件?何谓运动副、运动副元素、高副、低副?运动副是如何进行分类的?2.机构运动简图有何用处?它能表示出原机构哪些方面的特征?如何绘制机构运动简图?3.机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况?4.在计算机构的自由度时,应注意哪些事项?通常在哪些情况下存在虚约束?5.试判定图2-1a、b的构件组合体能否运动?若使它们成为具有确定运动的机构,在结构上如何改进?图2-16.如图2-2所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动筒图。
分析其是否能实现设计意图?并提出修改方案。
图2-27.试绘出图图2-3偏心油泵机构的运动简图 (其各部分尺寸由图上量取)。
该油泵的偏心轮1 绕固定轴心A转动,外环2上的叶片a在可绕轴心C转动的圆柱3中滑动。
当偏心轮1按图示方向连续回转时,可将右侧输入的油液由左侧泵出。
图2–3 图2-48.如图图2-4所示活塞泵机构中,3为扇形齿轮,4为齿条活塞,5为缸体。
当轮1回转时,活塞在气缸中往复运动。
试绘制该机构的运动简图,并计算其自由度。
9.图2-5所示油泵机构中,1为曲柄,2为活塞杆,3为缸休,4为机架。
试绘制该机构的运动简图,并计算其自由度。
10.图2-6所示冲床刀架机构中,当偏心轮2绕固定中心4转动时,构件2绕活动中心C摆动,同时带动刀架3上下移动。
B点为偏心轮的几何中心。
试绘制该机构的运动简图,并计算其自由度。
图2–5 图2-611.如图2–7所示为一小型压力机。
图中齿轮1与偏心轮1'为同—构件,绕固定轴心O连续转动。
在齿轮5上开有凸轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C轴上下摆动。
武汉理工大学【机械设计+机械原理】试卷及答案
武汉理工大学2014年《机械设计+机械原理》考研模拟试题一编写:亿研考研团队一.判断题(正确的在题后括号内填“T”,错误的填“F”,共15分)1、在铰链四杆机构中,通过取不同构件作为机架,则可以分别得到曲柄摇杆机构、双曲柄机构和双摇杆机构。
( F )杆长和条件2、在转动副和移动幅中都存在复合铰链。
(F )只有转动副中有3、槽轮机构的运动系数 不会等于零或1。
(T )0和1之间4、一只直齿轮和一只斜齿轮,只要满足两者的模数和压力角相等就可以正确啮合。
(F )5、渐开线上个点的压力角不同,其中基圆上的压力角为0 。
(T )6、硬齿面齿轮只可能产生轮齿折断,不会产生齿面点蚀。
( F )7、带速越高,产生的离心应力越大,因此应将带传动布置在多级传动的低速级。
(F )带传动要考虑载荷8、平键连接结构简单、装拆容易、对中性好,但不能够同时承受径向力和轴向力。
(T )9、设计圆柱齿轮传动时,通常使小齿轮的尺宽略大于大齿轮的尺宽,主要是为了提高小齿轮的强度。
(F )10、滚动轴承内座圈与轴颈的配合,通常采用基孔制。
(T )11、万向联轴器既能用于两轴线有较大位移的场合,也能用于有较大径向位移的场合。
(T )12、螺纹联接中,有时在一个螺栓上拧上两个螺母,目的是为了增加受载螺纹的圈数,有利于提高螺栓的强度。
( F )提高螺母强度。
13、实际的轴多做成阶梯形,主要是为了减轻轴的重量,降低制造费用。
(F )14、在多根三角带传动中,当一根带失效时,应将所有带更换。
(T )15、链传动中,当主动链轮匀速转动时,链速是变化的,但链传动的平均传动比恒定不变(T)二.选择题(每小题2分,共20分)1.下面哪种情况下,存在死点 D 。
A、双曲柄机构;B、对心曲柄滑块机构,曲柄主动;C、曲柄摇杆机构,曲柄主动;D、曲柄摇杆机构,摇杆主动。
2.最适合凸轮高速运转的从动件运动规律是 C 。
A、等速运动;B、等加速运动与等减速运动;C、简谐运动;D、摆线运动。
武汉理工机械制造复习课
x, y, x, y x, y, z x, y
该定位方案属过定位,重复限制了 改进措施: 1)去掉三爪卡盘;
不合理。 x, y,
2)将三爪卡盘与工件短夹持,右顶尖改为平头支承钉,共
限制
x, y, z
。
第二章 制造工艺装备
图d
习题讲解
在圆盘零件上钻孔,保证孔与外圆同轴。
d w jb j . y
第二章 制造工艺装备 第六节 机床夹具
3. 结论
定位误差: 基准不重合误差和基准位移误差在加工尺寸方向上投影
d w jb cos j . y cos
、 定位误差方向与工序尺寸方向的夹角
第四章 习题讲解
4-3 试分析转塔车床上将车刀垂直安装加工外圆时,影响直 径误差的因素中,导轨在垂直平面内和水平面内的弯曲,那个影
x,
定位不合理。
该定位方案属于过定位,重复限制
改进措施:应将固定V型块改为移动V型块,限制 z 。
第二章 制造工艺装备 第六节 机床夹具
3. 结论 (1)工件定位时,不仅要限制工件的自由度,使工件在加工
尺寸方向上有确定的位置,还必须减少定位误差。
(2)产生工件定位误差的原因有两个: ①定位基准与设计基准不重合,产生基准不重合的定位误差 Δj.b 。 ②定位副制造不准确,引起定位基准相对夹具定位元件的起 始基准发生位移,产生基准位移的定位误差Δj.y 。 (3)总定位误差为:
L4
L3
L2 L1
课 程 复 习
3.计算测量尺寸L4及其上下偏差 因
L3 L2 L4 L1
故
L4 L3 L1 L2 20 70 60 30mm
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
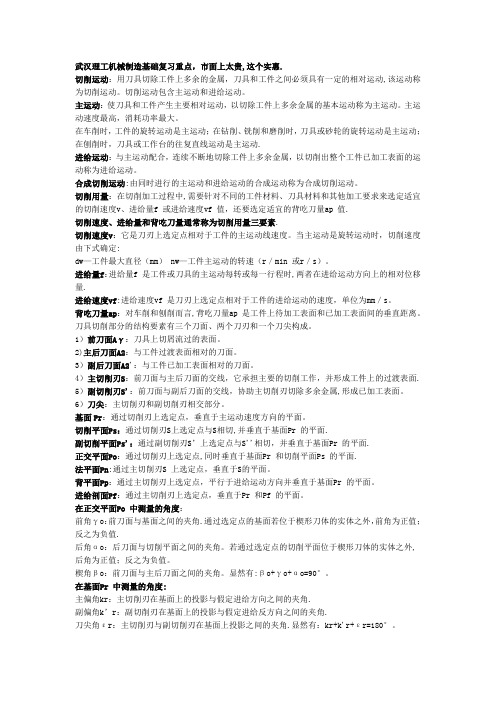
试求:
① F5的大小; ② 装在等效构件上飞轮的转动惯量;
③ 指出wmin和wmax出现的位置。 M(N·m)
Mre
Mrd
F5
F1
F2
F3
F4
a
b
c
d
j ea
李刚炎
11
9
第六章 机械的平衡
WHUT
李刚炎
mPrP
mBrB mArA
10
第七章 机械的运转及其速度波动的调节 WHUT
3. 某机组在一个稳定运动循环中的等效驱动力矩Mde和等效 阻力矩Mre如图所示。由Mde和Mre所组成的各块面积代表功的 大小,分别为F1=1500 N·m,F2=1000 N·m,F3=400 N·m,
李刚炎
6
第三章 平面机构的运动分析
WHUT
解:所有瞬心如图所示。P13和P24各2分,其它瞬心个1分
w3=w1×LP14P13/ LP34P13(1分),转向1分。
李刚炎
7
第四章 平面机构的力分析
4-14
WHUT
解:
李刚炎
8
第四章 平面机构的力分析
WHUT
(b)所示
李刚炎
(c)所示 (c)所示
第二章 平面机构的结构分析
WHUT
1. 试计算图示机构的自由度(写出计算公式;若有复合铰 链、局部自由度和虚约束请指出),其中:lJK= lMK = lNK。
H G
I J
解:
D
N
F=3n-2Pl-Ph=3*8-2*11-1=1 (4分) E处为复合铰链(1分); B处有局部自由度(1分);
C
E
F B
第十章 齿轮机构及其设计
WHUT
李刚炎
18
第十一章 轮系及其设计
WHUT
李刚炎
19
第十一章 轮系及其设计
WHUT
李刚炎
20
A
K M
在H或I及M处有虚约束(1分)。
李刚炎
1
第三章 平面机构的运动分析
WHUT
解:
李刚炎
2
第三章 平面机构的运动分析
WHUT
(2)
李刚炎
3
第三章 平面机构的运动分析
WHUT
李刚炎
4
第三章 平面机构的运动分析
WHUT
李刚炎
5
第三章 平面机构的运动分析
WHUT
在图示机构中,已知w1,试标出所有瞬心,并按瞬心法求w3 (用符号表示)。
第七章 机械的运转及其速度波动的调节 WHUT
2. 解:
① 因为:F1-F2+F3-F4+F5=0,所以:
F5=100N·m(3分) ② JF =ΔWmax/ ( δw2m )=12.8kg·m(2分) ③ wmin和wmax分别出现在e和b处。(2分)
李刚炎
12
Hale Waihona Puke 第八章 平面连杆机构及其设计
WHUT
李刚炎
13
第八章 平面连杆机构及其设计
WHUT
李刚炎
14
第九章 凸轮机构及其设计
WHUT
李刚炎
15
第九章 凸轮机构及其设计
WHUT
解:(1) 导路线、s、h、r0、a各1分;(2) 导路线、s、h、 a、偏距圆各1分,r0-2分。如图所示。
李刚炎
16
第十章 齿轮机构及其设计
WHUT
李刚炎
17