验证角动量守恒定律的简易实验
验证角动量守恒定律的一演示实验方法

验证角动量守恒定律的一演示实验方法1 角动量的定义在物理学中,角动量是描述刚体旋转运动状态的物理量。
刚体的角动量定义为其质量中心固定不动时,其每个质点与质心的位置矢量的叉积与其质量之积的总和。
2 角动量守恒角动量守恒是物理学中的一个重要定律,指的是一个系统在没有外部力矩作用下,其角动量的大小和方向不会发生改变。
如果外部有力矩作用,则角动量会发生改变,但总的角动量仍会守恒。
一个系统的角动量可以表示为L=r x p,其中r为质心到质点的位置矢量,p为质点的线性动量。
当外部没有力矩作用时,由于角动量的定义可以推导出L1=L2,即系统在某一时刻角动量的大小和方向等同于另一时刻。
这个定律在许多领域中都有应用,例如航天制造、医学等。
3 角动量守恒定律的演示实验验证角动量守恒定律的演示实验并不复杂,可以采用以下实验步骤:步骤1:准备实验器材。
需要准备一个旋转转台、一个重锤、一只指南针和一只卡尺。
步骤2:调整旋转转台。
将旋转转台放在水平平面上,向上竖起一个铁筒,将指南针放在铁筒上,观察指针是否停留在同一方向上。
如果指南针不在同一方向上,则需要重新调整旋转转台。
步骤3:实验操作。
将重锤与卡尺固定在旋转转台的边缘上,以重锤为起点,拉起旋转转台使其旋转起来。
记录旋转转台的角速度、角动量、角动量的大小等数据。
步骤4:改变实验条件。
可以通过改变旋转转台的角速度或者改变重锤的位置来改变实验条件。
步骤5:数据比对。
在实验过程中,可以将旋转转台的角速度、角动量、角动量的大小等数据与理论计算值进行比对,验证角动量守恒定律的正确性。
4 实验结果与分析在实验过程中,我们可以发现,当旋转转台在旋转过程中,重锤所在的位置发生变化时,旋转转台的角动量大小会相应发生变化,但总的角动量仍保持不变。
这就验证了角动量守恒定律的正确性。
总的来说,在数学计算过程中,角动量守恒定律的应用非常广泛,不仅可以让我们更好地理解物理规律,还可以为科学技术的发展提供科学依据。
角动量守恒定律实验报告
角动量守恒定律实验报告实验报告:角动量守恒定律一、实验目的1.通过实验验证角动量守恒定律。
2.掌握角动量守恒定律的应用。
二、实验仪器与材料1.光滑水平桌面2.旋转台3.旋转陀螺4.弹簧秤5.指针装置6.计时器7.视频摄像机三、实验原理与方法1.剛體的角动量定义为角动量,即L=Iω,其中L为角动量,I为转动惯量,ω为角速度。
2.根据角动量守恒定律,当没有外力或外力矩作用于系统时,系统的总角动量保持不变。
3.实验将利用旋转陀螺、弹簧秤和指针装置进行验证。
首先将旋转陀螺放在旋转台的中央位置,然后用弹簧秤的钩子钩住旋转陀螺上的一个点,使陀螺开始匀速旋转。
接着用指针装置在旋转陀螺的表面标注两个刻度线,以便观察角动量的变化。
最后,通过视频摄像机记录旋转陀螺的旋转过程。
四、实验步骤1.打开视频摄像机并将其对准旋转台上的旋转陀螺。
2.将旋转陀螺放在旋转台的中央位置,并使其开始匀速旋转。
3.用弹簧秤的钩子钩住旋转陀螺上的一个点,使陀螺旋转速度发生变化,并记录下来。
4.使用指针装置在旋转陀螺的表面标注两个刻度线,并通过视频摄像机记录下来。
5.观察视频记录,分析旋转陀螺的角动量变化。
五、实验结果与分析根据实验记录和观察视频,可以看出在实验过程中旋转陀螺的角动量一直保持不变。
当弹簧秤的钩子钩住陀螺后,陀螺的角速度有所改变,但是由于系统没有外力或外力矩作用,所以陀螺的角动量保持不变。
六、误差分析在实验过程中,可能存在以下误差:1.视频观测误差:视频摄像机可能存在帧率限制,导致角动量变化的细节难以观察清楚。
2.实验操作误差:在标注刻度线和钩住陀螺时,存在人为的误差,可能会对实验结果产生一定的影响。
七、实验结论通过本次实验的观测与分析,可以得出结论:在没有外力或外力矩作用的情况下,旋转陀螺的角动量保持不变,实验结果验证了角动量守恒定律的正确性。
八、实验体会通过本次实验,我深刻理解了角动量守恒定律的概念和应用。
实验过程中,要注意精确操作和观测,避免误差的产生,并合理利用现代技术手段来加强实验的观测和分析,提高实验结果的可靠性。
角动量守恒定律实验报告

角动量守恒定律实验报告实验目的本实验旨在通过观察并分析旋转物体的角动量守恒定律,探究在没有外力矩作用下,旋转体系的角动量是否守恒,并验证角动量守恒定律在实验中的适用性。
实验原理角动量是描述旋转物体运动状态的物理量,它定义为质点的质量乘以其角速度,公式表示为: \[L = I\omega\] 其中,L 表示角动量,I表示质点的转动惯量,\(\omega\)表示角速度。
根据角动量守恒定律,如果在旋转体系中没有外力矩作用,则旋转体系的总角动量将保持不变,即: \[L_{\text{initial}} = L_{\text{final}}\]实验步骤1.准备一个可旋转的物体和一个恒定角速度的电动机。
2.将电动机连接到旋转物体上,并保证电动机能够提供恒定的角速度。
3.开始实验前,通过测量旋转物体的质量和尺寸估算转动惯量。
4.打开电动机,并记录旋转物体的初始角速度和角动量。
5.在没有外力矩作用的情况下,观察旋转物体的运动情况并记录。
6.停止电动机,记录旋转物体的最终角速度和角动量。
7.比较实验前后的角动量,验证角动量守恒定律。
数据记录与分析本实验中,我们使用了一个旋转物体和一个恒定角速度的电动机进行实验。
实验前,我们通过质量和尺寸测量估算了旋转物体的转动惯量为\(I_{\text{initial}}\)。
实验开始时,我们记录了旋转物体的初始角速度\(\omega_{\text{initial}}\)和初始角动量\(L_{\text{initial}}\)。
在实验过程中,我们观察到旋转物体在没有外力矩作用的情况下,保持了恒定的角速度,并且始终保持旋转状态。
实验结束时,我们记录了旋转物体的最终角速度\(\omega_{\text{final}}\)和最终角动量\(L_{\text{final}}\)。
通过对实验数据的分析,我们可以计算出实验前后的角动量差,即: \[\Delta L = L_{\text{final}} - L_{\text{initial}}\]根据角动量守恒定律,如果实验中没有外力矩作用,则角动量的差应当接近于0。
动量守恒定律的实验验证与应用
动量守恒定律的实验验证与应用动量守恒定律是一个非常重要的物理定律,用于描述物体运动过程中动量的守恒关系。
简单来说,动量守恒定律可以被解释为“一个封闭系统中,所有相互作用的物体的总动量保持不变”。
为了验证动量守恒定律,我们可以进行一些实验。
一种简单的实验是通过利用弹性碰撞现象来观察动量守恒。
我们可以准备两个球体,分别用绳子悬挂起来。
首先,通过测量两个球的质量和初始高度,我们可以计算出它们的初始动量。
然后,我们让其中一个球静止不动,用另一个球进行碰撞。
通过观察和测量碰撞后两个球的运动情况,我们可以计算出碰撞后两个球的动量。
在实验中,我们可以发现碰撞前后两个球的总动量是守恒的。
也就是说,碰撞前后两个球的动量之和保持不变。
这验证了动量守恒定律的正确性。
动量守恒定律不仅在物理实验中得到了验证,而且在日常生活中也有很多应用。
例如,在交通事故中,动量守恒定律可以帮助我们解释事故发生后车辆的运动情况。
根据动量守恒定律,当两辆车发生碰撞时,它们的总动量保持不变。
如果一辆车速度很快,另一辆车速度较慢,那么碰撞后速度较慢的车辆会获得部分速度,而速度较快的车辆会减慢。
这有助于我们评估事故的严重程度和伤害情况,并为事故的调查提供依据。
另外,动量守恒定律还可以用于设计和改进各种交通工具和体育器材。
例如,在制造汽车时,设计师们可以通过调整车辆的质量和速度来保证驾驶安全性。
在制造体育器材时,设计师们可以根据动量守恒定律来确保器材的使用安全和运动效果。
此外,动量守恒定律还可以应用于航天技术领域。
在火箭发射过程中,火箭会喷出高速气体,从而产生一个向下的动量。
而火箭本身会受到一个向上的动量作用,从而推动火箭上升。
这种基于动量守恒定律的推进原理被广泛应用于航天器的发射和航行中。
总结起来,动量守恒定律通过实验验证,成为一个基本的物理定律。
它不仅在物理学中有重要地位,还可以应用于日常生活和各种领域的实际问题中,为我们解释和研究现象提供了强大的工具。
20版:实验七 验证动量守恒定律(创新设计)
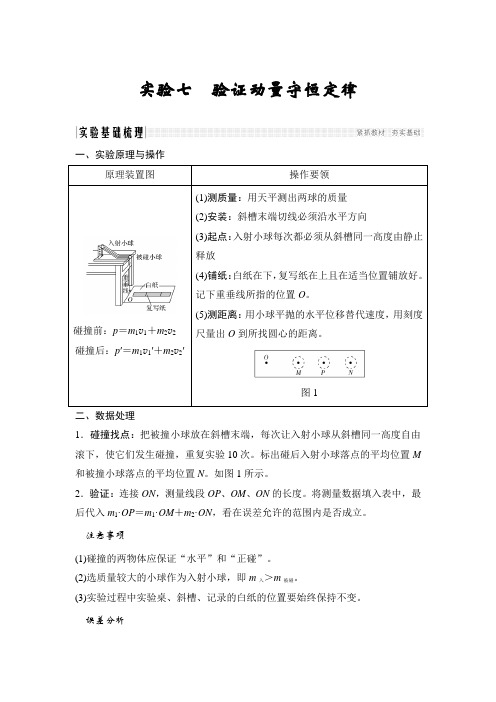
实验七验证动量守恒定律一、实验原理与操作原理装置图操作要领碰撞前:p=m1v1+m2v2碰撞后:p′=m1v1′+m2v2′(1)测质量:用天平测出两球的质量(2)安装:斜槽末端切线必须沿水平方向(3)起点:入射小球每次都必须从斜槽同一高度由静止释放(4)铺纸:白纸在下,复写纸在上且在适当位置铺放好。
记下重垂线所指的位置O。
(5)测距离:用小球平抛的水平位移替代速度,用刻度尺量出O到所找圆心的距离。
图1二、数据处理1.碰撞找点:把被撞小球放在斜槽末端,每次让入射小球从斜槽同一高度自由滚下,使它们发生碰撞,重复实验10次。
标出碰后入射小球落点的平均位置M 和被撞小球落点的平均位置N。
如图1所示。
2.验证:连接ON,测量线段OP、OM、ON的长度。
将测量数据填入表中,最后代入m1·OP=m1·OM+m2·ON,看在误差允许的范围内是否成立。
注意事项(1)碰撞的两物体应保证“水平”和“正碰”。
(2)选质量较大的小球作为入射小球,即m入>m被碰。
(3)实验过程中实验桌、斜槽、记录的白纸的位置要始终保持不变。
误差分析(1)主要来源于质量m1、m2的测量。
(2)小球落点的确定。
(3)小球水平位移的测量。
热点一教材原型实验命题角度实验原理及操作步骤【例1】如图2,用“碰撞实验器”可以验证动量守恒定律,即研究两个小球在轨道水平部分碰撞前后的动量关系。
图2(1)实验中,直接测定小球碰撞前后的速度是不容易的,但是,可以通过仅测量________(填选项前的符号),间接地解决这个问题。
A.小球开始释放高度hB.小球抛出点距地面的高度HC.小球做平抛运动的射程(2)图中O点是小球抛出点在地面上的垂直投影。
实验时,先将入射球m1多次从斜轨上S位置由静止释放,找到其平均落地点的位置P,测量平抛射程OP。
然后,把被碰小球m2静止于轨道的水平部分,再将入射小球m1从斜轨上S位置由静止释放,与小球m2相撞,并多次重复。
深圳大学-角动量守恒定律实验报告
深圳大学实验报告课程名称:大学物理实验(三)
实验名称:验证角动量守恒定律及误差分析
学院:物理科学与技术学院
组号25 指导教师:
报告人:学号:
实验地点科技楼B109 实验时间:2014.06.03
实验报告提交时间:
2.1.3、在空载情况下,承物台在质量不同的砝码作用下的角速度图像如图3:
2.1.4、经修正过后的角加速度的真实值如下表一所示:
表一:不同情况下的角加速度β
砝码m(g) g(m/s 2) 滑轮r(mm) mgr(kg*m 2/s 2) 负载
β1(kg/m2) 空载
β2(kg/m2) 40 9.8 14.5 0.005684 0.2598 0.4265 50 9.8 14.5 0.007105 0.3420 0.5558 60 9.8 14.5 0.008526 0.4265 0.6827 图2 负载时不同砝码质量下角速度
图3 空载时不同砝码质量下角速度
从图6中可以整理出如表二所示的数据:
表二:合外力矩为零,将圆环落在转动的盘上的角速度变化情况
序号 1 2 3 4 5
空载转动惯量J
=0.0109kg
·m2角速度ω
(rad/s)
27.58 27.14 26.1 25.42 24.82
角速度ω
1
(rad/s)
18.06 17.68 16.89 16.56 16.07
图6 角速度变化情况。
角动量守恒实验报告
角动量守恒实验报告角动量守恒实验报告引言:角动量守恒是物理学中的一个重要概念,它描述了一个物体在没有外力作用下,角动量的大小和方向保持不变。
本实验旨在通过探究不同物体在旋转过程中的角动量变化,验证角动量守恒定律。
实验目的:1. 理解角动量守恒定律的基本原理;2. 通过实验验证角动量守恒定律。
实验器材:1. 旋转平台2. 陀螺仪3. 弹簧秤4. 直尺5. 实验记录表格实验步骤:1. 将旋转平台放置在平稳的桌面上,并确保其处于水平状态。
2. 将陀螺仪置于旋转平台上,并使其保持平衡。
3. 用直尺测量陀螺仪的初始半径,并记录在实验记录表格中。
4. 启动旋转平台,使其以适当的角速度旋转。
5. 用弹簧秤测量陀螺仪在旋转过程中的转动力矩,并记录在实验记录表格中。
6. 停止旋转平台,记录陀螺仪停止旋转后的半径,并记录在实验记录表格中。
实验结果分析:根据角动量守恒定律,当没有外力作用时,物体的角动量保持不变。
在本实验中,陀螺仪在旋转过程中受到的转动力矩可以通过弹簧秤测量得到。
根据实验记录表格中的数据,可以计算出陀螺仪在旋转过程中的角动量。
实验讨论:1. 在实验中,我们观察到陀螺仪在旋转过程中的半径发生了变化。
这是因为陀螺仪在旋转过程中受到了摩擦力的作用,导致其逐渐失去能量,从而使半径减小。
2. 在实验中,我们还观察到陀螺仪在停止旋转后的半径与初始半径不完全相同。
这是因为在陀螺仪停止旋转后,由于摩擦力的作用,它仍然受到了一定的转动力矩,导致半径不再保持恒定。
3. 实验中的转动力矩可以通过弹簧秤测量得到,但由于弹簧秤的精度限制,测量结果可能存在一定的误差。
结论:通过本实验,我们验证了角动量守恒定律。
在没有外力作用下,物体的角动量保持不变。
同时,我们也观察到陀螺仪在旋转过程中的半径和停止旋转后的半径会发生变化,这是由于摩擦力的作用。
实验结果与理论相符合,验证了角动量守恒定律的有效性。
实验的局限性和改进:1. 实验中使用的陀螺仪可能存在一定的制造误差,导致实验结果的不准确性。
深圳大学角动量守恒定律实验报告
深圳大学角动量守恒定律实验报告
部门: xxx
时间: xxx
整理范文,仅供参考,可下载自行编辑
学实验
告
课程名称:大学物理实验<三)
实验名称:验证角动量守恒定律及误差分析
学院:物理科学与技术学院
组号 25 指导教师:
报告人:学号:
实验地点科技楼B109 实验时间:2018.06.03
实验报告提交时间:
统的角动量守恒
图2 负载时不同砝码质量下
2.1.3、在空载情况下,承物台在质量不同的砝码作用下的角速度图
图 3 空载时不同砝码质量下
像如图3:
2.1.4、经修正过后的角加速度的真实值如下表一所示:
表一:不同情况下的角加速度β
砝码g(m/s2>滑轮r(mm>mgr(kg*m2/s2>负载空载
图 4 负载时的转动
从图6中可以整理出如表二所示的数据:
表二:合外力矩为零,将圆环落在转动的盘上的角速度变化情况
序号 1 2 3 4 5 空载转动惯量J 0=0.0109kg
角速度
ω0<rad/s> 27.58
27.14 26.1 25.42 24.82 角速度
ω<rad/s> 18.06
17.68
16.89
16.56
16.07
图6 角速度变化情况
申明:
所有资料为本人收集整理,仅限个人学习使用,勿做商业用途。