激光测振原理及应用
激光振动测试仪在振动测试教学中的应用
Advances in Education教育进展, 2019, 9(6), 650-659Published Online November 2019 in Hans. /journal/aehttps:///10.12677/ae.2019.96106Application of Laser VibrationInstrument in Vibration TestTeachingShuyong Liu1, Yongbao Liu1, Jinfang Lu2, Kai Chai3*, Pan Su11College of Power Engineering, Naval University of Engineering, Wuhan Hubei2College of Civil Engineering, Hunan University, Changsha Hunan3College of Naval Architecture and Ocean, Naval University of Engineering, Wuhan HubeiReceived: Oct. 3rd, 2019; accepted: Oct. 17th, 2019; published: Oct. 24th, 2019AbstractThe application of a novel laser vibration tester in vibration monitoring experimental teaching is discussed. Firstly, the main characteristics and use occasions of the instrument are analyzed. Se-condly, the experimental bench and experimental steps are designed. Thirdly, the different para-meters under the condition of the test results are compared. Then, the time domain curve and the frequency domain characteristic curve of the vibrating body are obtained. Finally, the factors af-fecting the test results and the precautions are discussed, which lays a foundation for the applica-tion of laser vibration tester in engineering practice.KeywordsLaser Vibration Instrument, Vibration Monitoring, Experimental Teaching激光振动测试仪在振动测试教学中的应用刘树勇1,刘永葆1,卢锦芳2,柴凯3*,苏攀11海军工程大学,动力工程学院,湖北武汉2湖南大学,土木工程学院,湖南长沙3海军工程大学,舰船与海洋学院,湖北武汉收稿日期:2019年10月3日;录用日期:2019年10月17日;发布日期:2019年10月24日*通讯作者。
激光测振原理及应用
(17—16)
由(17—15)式、(17—16)式解得速度分量为
Vx
= Vzx
− Vz cosθ sin θ
(17—17)
475
PDF created with pdfFactory Pro trial version
Vy
=
Vzy
− Vz cosψ sin ψ
图 17—7 用时间平均法 ESPI 测量传统乐器 Veena 振动的图像
涉条纹不随振幅增加而衰减,缺点是振动节线不明显。该方法对非正弦振动也可以进行测量。 随着激光技术的飞速发展,多脉冲激光器发出的脉冲激光的光脉冲时间极短,约为几十
纳秒,可以用来做全息振动测量的光源。
473
PDF created with pdfFactory Pro trial version
v x
u
个位移分量的时间函数, u(x, y, z, t), v(x, y, z,t), w(x, y, z,t) 。 在 非 接触式测量方法中,各种激光测量方法, 因原理不同,可以分别实现物体表面的点
w z
图 17—1 物体的振动及坐标系
测量或物体表面的面(场)测量,并且激
光束的入射方向与物体的表面法线方向应满足一定的几何要求。
间隔δt 中,假定 P 移动到 P′ 的距离为 Vδt。 在光程中周期数将减少为
− δn
=
PN λ
+
PN ′ λ ′′
(17—7)
其中 PN 和 PN′分别是向 SP 和 PO 作的垂线,PP′为无限小,λ 和λ″ 是散射前后的波长。
(17—7)可表示为
− δn
=
Vδt
cos θ1 λ
+
激光测振仪基础激励模态
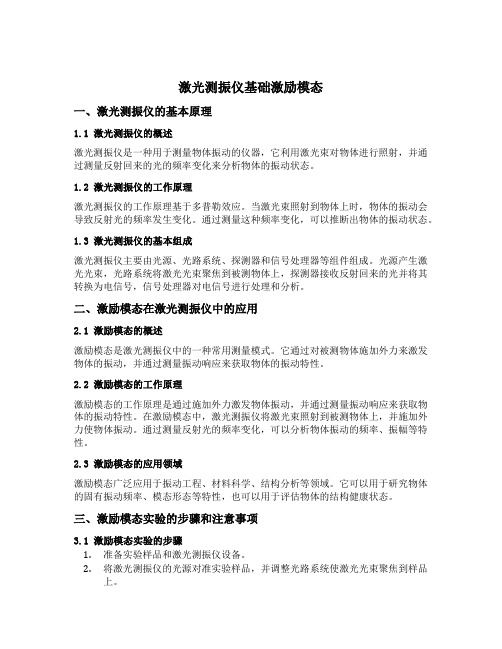
激光测振仪基础激励模态一、激光测振仪的基本原理1.1 激光测振仪的概述激光测振仪是一种用于测量物体振动的仪器,它利用激光束对物体进行照射,并通过测量反射回来的光的频率变化来分析物体的振动状态。
1.2 激光测振仪的工作原理激光测振仪的工作原理基于多普勒效应。
当激光束照射到物体上时,物体的振动会导致反射光的频率发生变化。
通过测量这种频率变化,可以推断出物体的振动状态。
1.3 激光测振仪的基本组成激光测振仪主要由光源、光路系统、探测器和信号处理器等组件组成。
光源产生激光光束,光路系统将激光光束聚焦到被测物体上,探测器接收反射回来的光并将其转换为电信号,信号处理器对电信号进行处理和分析。
二、激励模态在激光测振仪中的应用2.1 激励模态的概述激励模态是激光测振仪中的一种常用测量模式。
它通过对被测物体施加外力来激发物体的振动,并通过测量振动响应来获取物体的振动特性。
2.2 激励模态的工作原理激励模态的工作原理是通过施加外力激发物体振动,并通过测量振动响应来获取物体的振动特性。
在激励模态中,激光测振仪将激光束照射到被测物体上,并施加外力使物体振动。
通过测量反射光的频率变化,可以分析物体振动的频率、振幅等特性。
2.3 激励模态的应用领域激励模态广泛应用于振动工程、材料科学、结构分析等领域。
它可以用于研究物体的固有振动频率、模态形态等特性,也可以用于评估物体的结构健康状态。
三、激励模态实验的步骤和注意事项3.1 激励模态实验的步骤1.准备实验样品和激光测振仪设备。
2.将激光测振仪的光源对准实验样品,并调整光路系统使激光光束聚焦到样品上。
3.施加外力激发实验样品的振动,并保持振动状态稳定。
4.启动激光测振仪的探测器和信号处理器,开始采集和分析振动信号。
5.根据实验需求,调整激光测振仪的参数,如采样频率、测量时间等。
6.完成实验后,关闭设备并进行数据分析和结果展示。
3.2 激励模态实验的注意事项1.在实验过程中要注意安全,避免激光直接照射到人眼。
激光测振仪工作原理
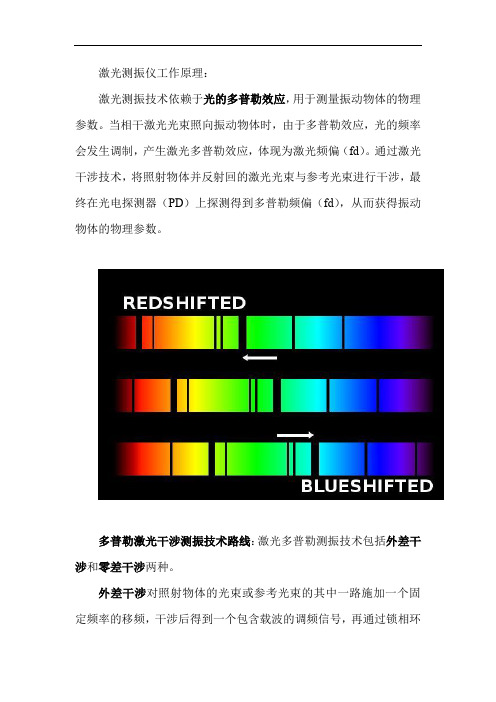
激光测振仪工作原理:
激光测振技术依赖于光的多普勒效应,用于测量振动物体的物理参数。
当相干激光光束照向振动物体时,由于多普勒效应,光的频率会发生调制,产生激光多普勒效应,体现为激光频偏(fd)。
通过激光干涉技术,将照射物体并反射回的激光光束与参考光束进行干涉,最终在光电探测器(PD)上探测得到多普勒频偏(fd),从而获得振动物体的物理参数。
多普勒激光干涉测振技术路线:激光多普勒测振技术包括外差干涉和零差干涉两种。
外差干涉对照射物体的光束或参考光束的其中一路施加一个固定频率的移频,干涉后得到一个包含载波的调频信号,再通过锁相环
技术或正交混频得到多普勒频偏或相位,直接对应振动物体的振动速度或相对位移。
零差干涉则对照射物体的光束和参考光束进行零频率处理,直接干涉得到一个零频附近(不包含载波)的调频信号,通过光学方式同时得到I和Q的信号,后续通过鉴相解调方式,得到相位,直接对应振动物体的相对位移。
激光多普勒测振技术及方案
1.1 多普勒频移概念
多普勒频移效应是为了纪念克里斯琴·多普勒·约翰而命名的,他于 1842 年提出这一理论, 主要内容为: 物体辐射的波长因为光源和观测者的相对运动而 产生变化。在运动的波源前面,波被压缩,波长变得较短,频率变得较高。在运 动的波源后面,波被拉长,波长变得较长,频率变得较低。波源的速度越高,产 生的频移效应越大。 多普勒效应是速度测量中所用到的最主要的物理效应。假设一个固定波源发 出频率为 f s 的单频波,波的传播速度为 c ,波长为 ,观测者相对于波源的运动 速度为 v ,观测者接收到的波频率为 f ,产生的频移量为 f 。下面我们做一个 简单的推导: 如果波源和观测者都不动,那么时间 t 内观测者接收到 tf s 个波长。如果观测 者相对于波源以速度 v 运动(向波源方向运动为正,相反为负) ,那么相当于在 vt 时间 t 内,观测者多接收到了 个波长。
一个参数,就可以得到物体的振动频率。因此,可以利用激光多普勒技术测量叶 片的瞬时振动位移、速度来得到叶片的振动频率。
方案一:激光干涉法测量叶片振动位移
1. 光路如下图:
角锥反射镜
PBS 激光器 角锥反射镜
信号处理
光敏二极管
图 2.1 激光干涉法测位移光路一
图 2.2 激光干涉法测位移光路二
2.测量原理 (1)光的干涉:干涉现象是光的波动性独有的特性,两列或几列光波在空 间相遇时相互叠加,在某些区域始终加强,在另一些区域始终削弱,形成稳定的 强弱分布的现象,称之为光的干涉现象。明与暗的间隔为半个波长,即 。 2 干涉产生的条件: 只有两列光波的频率相同, 相位差恒定, 振动方向一致 (光 具有偏振现象)的相干光源,才能产生光的干涉。 (2)利用光的干涉测量位移的原理:如图 2.1 和 2.2,如果被测物体位置改 变时,反射光路的长度发生变化,干涉时相位会发生改变,反映在干涉条纹上的 现象是, 明暗交替的干涉条纹会沿着一个方向运动。通过光探测器来检测通过某 个点的光强变化,可以“数”出条纹的移动距离,来推算出物体的移动距离。 如图 2.1,一个角锥反射镜紧紧固定在分光镜上,形成固定长度参考光束。 另一个角锥反射镜相对于分光镜移动,形成变化长度测量光线。从激光头射出的 激光光束具有稳定的单一频率, 当此光束到达偏振分光镜时,被分成两束光—— 反射光束和透射光束。 两束光被传送到各自的角锥反射镜中,然后反射回分光镜 中,在探测器中形成干涉光束。如果两光光程差不变化,探测器将在相长干涉和 相消干涉的两端之间的某个位置观察到一个稳定的信号(即干涉条纹不动) 。如 果两光程差发生变化, 每次光路变化时探测器都能观察到相长干涉和相消干涉两 端之间的信号变化,这些条纹被数出来,用于计算光程差的变化,测量的长度等 于条纹数乘以激光波长的一半,即 s n 。 2 图 2.2 的光路,与图 2.1 类似,因为接收器的位置与激光器相差 90 度,因 此角锥反射镜可被反射镜代替,但系统占用空间较大。 3.系统组成 激光器、 半透半反镀银分光镜 PBS、 反射镜 (或角锥反射镜) 、 光敏二极管 (或 光电倍增管) 、示波器(或信号处理与采集系统) 4.系统适用范围 低频大振幅或高频小振幅的振动情况。由于多普勒频移的存在,使得测量结 果受到一定影响,如果振动速度不大,对于测量平均位移来说仍有较高的精度。
激光干涉原理在振动测量中的应用讲解
激光干涉原理在振动测量中的应用激光干涉原理在振动测量中的应用0 引言振动量值的计量是计量科学中一个非常重要的方面。
在现实中,描述振动特性的最常用的量值是位移、速度、加速度。
常用的测振技术是接触式测量。
在测量物体上安装加速度传感器,利用加速度传感器的电荷输出信号实现加速度- 速度- 位移的相关测量。
如果测量较小物体的振动,附加的传感器质量往往影响被测物体的振动,从而产生测量误差;而且一些工作场合因被测物体表面影响或是测量条件的限制往往激光干涉原理在振动测量中的应用0 引言振动量值的计量是计量科学中一个非常重要的方面。
在现实中,描述振动特性的最常用的量值是位移、速度、加速度。
常用的测振技术是接触式测量。
在测量物体上安装加速度传感器,利用加速度传感器的电荷输出信号实现加速度-速度-位移的相关测量。
如果测量较小物体的振动,附加的传感器质量往往影响被测物体的振动,从而产生测量误差;而且一些工作场合因被测物体表面影响或是测量条件的限制往往不允许在被测物体表面安装测振传感器。
因此设计和开发新型的非接触式、高精度、实时性的测振技术一直是工程科学和技术领域中的重要任务。
由于激光的方向性、单色性和相干性好等特性,使激光测量技术广泛应用于各种军事目标的测量和精密民用测量中,尤其是在测量各种微弱振动、目标运动的速度及其微小的变化等方面。
1激光干涉测振原理激光干涉测振技术是以激光干涉原理为基础进行测试的一门技术,测试灵敏度和准确度高,绝大部分都是非接触式的。
激光干涉原理如图1 所示。
光源S处发出的频率为f、波长为入的激光束一部分投射到记录介质H(比如全息干板)上,光波的复振幅记为E1,另一部分经物体0表面反射后投射到记录介质H上,光波的复振幅记为E2。
其中:式中:A1和A2分别为光波的振幅;(T 1和(T 2分别是光波的位相;当E1和E2满足相干条件时,其光波的合成复振幅E为:光强分布I 为:式(4)的四项中前三项均为高频分量,只有第四项为低频分量,且与物体表面的状态有关。
激光测振仪
激光测振仪
激光测振仪简介
激光测振仪是基于光学干涉原理,采用非接触式的测量方式,可以应用在许多其他测振方式无法测量的任务中。
频率和相位响应都十分出色,足以满足高精度、高速测量的应用。
使用非接触测量方式,还可以检测液体表面或者非常小物体的振动,同时,还可以弥补接触式测量方式无法测量大幅度振动的缺陷。
激光测振仪原理
He-Ne 激光器发出一定频率的偏振光(设频率为F0)由分光镜分成两路,一路作为测量,一路用于参考。
测量光通过声光调制器具有一定频移(F),再被聚焦到被测物体表面,物体振动引起多普勒频移(f)。
系统再收集反射光与参考光汇聚在传感器上,这样两束光产生在传感器表面产生干涉,干涉信号的频率为F+f,携带了被测物体的振动信息。
信号处理器将频移信号转换为速度和位移信号。
应用领域
激光测振仪采用非接触式动态干涉测量技术,在以下各方面有广泛的应用:
l 马达回转动态精度测试;
l 机床动态精度测试;
l 生命科学、医学、动物学研究;
l 汽车工业:发动机、齿轮、制动器、轮胎、排气系统、车身等;
l 微机电系统(MEMS)动态测试;
l 桥梁、建筑振动测试。
激光测振仪主要技术参数
操作温度
3°C~45°C
操作湿度
<90% 电源
100~230Vrms 50-60hz 激光
氦氖激光632.8nm 工作距离
0.35m~20m 最大速度范围
10m/s 频率范围
DC~2.5MHz 典型精度 1% 激光测振仪光学头 激光测振仪控制箱。
激光测震的原理与应用
激光测震的原理与应用1. 激光测震的原理激光测震是一种利用激光技术来测量地震震动的方法。
其原理基于光学干涉的原理和地震产生的地面振动,利用激光器发出的激光束在受振动的地面上产生干涉信号,通过测量干涉信号的变化来获取有关地震的信息。
1.1 光学干涉原理光学干涉是指两束或多束光线在空间中相互叠加而产生的干涉现象。
在激光测震中,主要利用的是Michelson干涉仪的原理。
Michelson干涉仪由一束激光束穿过分束器被分成两束,分别经由两条光路到达合束器再被接收器接收。
当地面发生振动时,其中一束光线经过地面的干涉信号发生变化,通过探测器可以得到与地震相关的信号。
1.2 地面振动与信号解读地面振动是地震产生的最主要特征之一。
当地面发生震动时,产生的振幅和频率会导致干涉信号的变化,通过测量干涉信号的强度和频率变化,可以得到地震的信息。
激光测震可以精确地测量地震的振幅、频率和方向等信息,从而帮助科学家更好地理解地震现象并提供相关的数据支持。
此外,激光测震还可以对地下水位、地壳沉降、水库湖泊水位等地质现象进行观测,具有广泛的应用价值。
2. 激光测震的应用2.1 地震监测与研究激光测震在地震监测和研究方面发挥着重要的作用。
传统的地震观测方法需要设置大量的传感器和测量设备,而激光测震只需要设置一个激光器和接收器,可以实现对地震波的精确测量和记录。
通过对地震数据的分析和解读,可以帮助科学家们更好地预测地震的发生和发展趋势,为地震灾害的防范和减轻提供重要的参考依据。
2.2 地质勘探与矿产开发激光测震在地质勘探和矿产开发方面也具有广泛的应用前景。
通过对地面振动的测量和解读,可以获取地下结构的信息,包括地层的变化、岩石层的厚度和密度等。
这些信息对于地质勘探和矿产开发来说非常重要,可以帮助科学家们确定矿产资源的分布和储量情况,提高勘探的效率和准确性。
2.3 建筑结构安全监测激光测震可用于建筑结构的安全监测。
在大型建筑物或桥梁等基础设施工程中,地震波对结构的震动影响是一个重要的安全因素。
激光测振仪内外测振原理
激光测振仪内外测振原理激光测振与人类的生产生活是息息相关的,在材料探伤、机械系统的故障诊断、噪声消除、结构件的动态特性分析及振动的有限元计算结果验证等方面广泛应用。
此项测量技术方法促使人类的生产生活质量向着更好更完善的方向发展,随着激光振动测量技术的成熟与完善,高精度、高效率、低成本的测量方案必将实现并走向成熟。
面外测振偏振光从氦氖激光分束器分裂成两束,一个用于测量,一个用于参考。
前者通过调制提供频移F,并且集中在样品表面。
系统收集物体的反射光束和在传感器表面干涉的参考光束。
由于多普勒效应,干涉频率是F+f,f是将要测量的样品振动频率。
由于多普勒频移与速度成正比,也就是f = 2v/λ,f是频率。
从传感器出来的信号与输出电压信号成线性比例关系。
也就是U=k×(F+f)+L=k×f+L‘, U是输出电压L, L’是常数,电压信号的直流部分被高通滤波器除去,所以输出信号是U=k×f=2kv/ λ.因此电压和振动速度成比例,也就是说v=k‘×U,k’是常数.面内测振激光内测振仪测量的是垂直于两个汇聚激光探针平分线平面内的表面移动速度。
背散色激光的频移(多普勒效应)决定了速度。
信号处理把振动(交流电源)组件和连续运动(直流电源,平均速度)分开。
在测量头里面,输出激光被分成两束。
探测光离开测量头,在待测移动表面,以一个已知的角度Φ汇聚和交叠。
两束交叠的光作用在由平行光和暗条纹构成的干涉图样的3D区域(测量范围)将要测量的表面切割了测量体积,显示和散色条纹的中间部分。
边缘间距d仅由交叉半角Φ和光的波长λ决定。
波长的稳定,产品的设计与生产对保持两个变量不变是很重要的.多普勒频移和速度直接成正比例.嘉兆公司拥有40年测试测量行业经验,专业的销售、技术、服务团队,在众多领域都非常出色,包括:通用微波/射频测试、无线通信测试、数据采集记录与分析、振动与噪声分析、电磁兼容测试、汽车安全测试、精密可编程测量电源、微波/射频元器件、传感器等并分别在深圳、北京、上海、武汉、西安、沈阳、珠海、成都设有全资分公司、生产工厂、办事处。
激光振动测试仪在振动测试教学中的应用
Advances in Education教育进展, 2019, 9(6), 650-659Published Online November 2019 in Hans. /journal/aehttps:///10.12677/ae.2019.96106Application of Laser VibrationInstrument in Vibration TestTeachingShuyong Liu1, Yongbao Liu1, Jinfang Lu2, Kai Chai3*, Pan Su11College of Power Engineering, Naval University of Engineering, Wuhan Hubei2College of Civil Engineering, Hunan University, Changsha Hunan3College of Naval Architecture and Ocean, Naval University of Engineering, Wuhan HubeiReceived: Oct. 3rd, 2019; accepted: Oct. 17th, 2019; published: Oct. 24th, 2019AbstractThe application of a novel laser vibration tester in vibration monitoring experimental teaching is discussed. Firstly, the main characteristics and use occasions of the instrument are analyzed. Se-condly, the experimental bench and experimental steps are designed. Thirdly, the different para-meters under the condition of the test results are compared. Then, the time domain curve and the frequency domain characteristic curve of the vibrating body are obtained. Finally, the factors af-fecting the test results and the precautions are discussed, which lays a foundation for the applica-tion of laser vibration tester in engineering practice.KeywordsLaser Vibration Instrument, Vibration Monitoring, Experimental Teaching激光振动测试仪在振动测试教学中的应用刘树勇1,刘永葆1,卢锦芳2,柴凯3*,苏攀11海军工程大学,动力工程学院,湖北武汉2湖南大学,土木工程学院,湖南长沙3海军工程大学,舰船与海洋学院,湖北武汉收稿日期:2019年10月3日;录用日期:2019年10月17日;发布日期:2019年10月24日*通讯作者。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
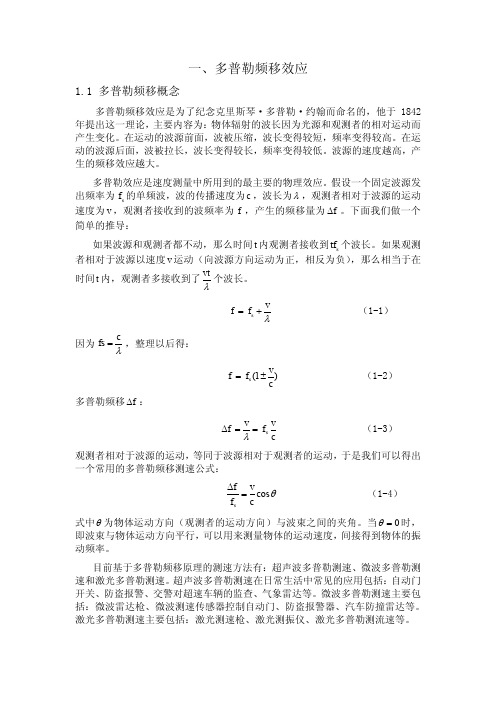
时间平均法的实验过程简单,节 线清晰,因此在振动分析中广泛使用。
(a)Mode I
(b) Mode II
(c) Mode I + Mode II
图 17—5 圆板的振动模态
472
PDF created with pdfFactory Pro trial version
17.4 激光多普勒效应
当波源向着接收器移动时,波源和接收器之间传递的波将发生变化,波长缩短,频率升 高;反之,当波源背着接收器移动时,波源和接收器之间传递的波的波长将变长,频率会降 低;这一现象是奥地利的物理学家 J. C. Doppler 于 1842 年首先发现的,称为多普勒效应。 发生多普勒效应的波可以是声波,也可以是电磁波。利用激光多普勒效应,不仅能测量固体 的振动速度,而且也能测量流体(液体和气体)的流动速度。
E2 = A2 cos(2πft + ϕ2 )
(17—2)
式中,A1 和 A2 分别为光波的振幅。ϕ1 和ϕ2 则分别是光波的位相。当 E1 和 E2 满足相干条件
470
PDF created with pdfFactory Pro trial version
时,其光波的合成复振幅为 E E = E1 + E2 = A2 cos(2πft + ϕ2 ) + A2 cos(2πft + ϕ2 )
上是物体振动的节点。 当 V(x, y)= 0.19λ,0.43λ,
0.68λ ...,I = 0 时;也就是干涉暗条 纹。在该条纹的位置上是物体振动
激光束
V(x, y) θ2
θ1
全息干板
的最大振幅。 干涉图中其余点处的振幅值也
可按照(17—6)式所示的规律相应
物体
图 17—3 激光全息测振
地确定下来。
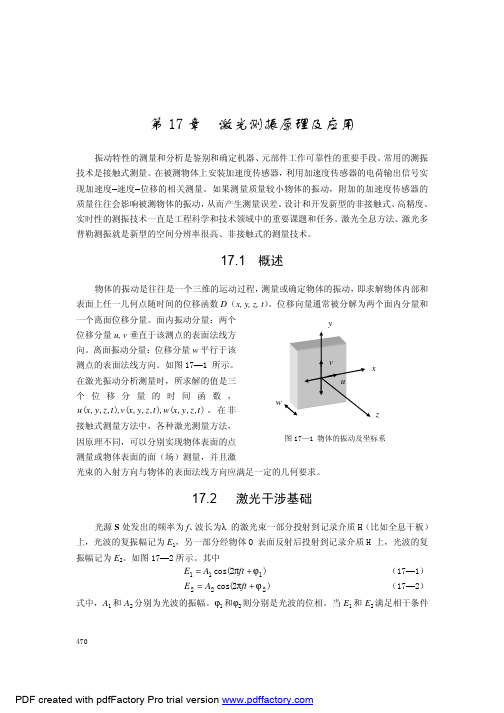
17.1 概述
物体的振动是往往是一个三维的运动过程,测量或确定物体的振动,即求解物体内部和
表面上任一几何点随时间的位移函数 D(x, y, z, t)。位移向量通常被分解为两个面内分量和
一个离面位移分量。面内振动分量:两个
y
位移分量 u, v 垂直于该测点的表面法线方
向。离面振动分量:位移分量 w 平行于该 测点的表面法线方向。如图 17—1 所示。 在激光振动分析测量时,所求解的值是三
17.2 激光干涉基础
光源 S 处发出的频率为 f、波长为λ 的激光束一部分投射到记录介质 H(比如全息干板)
上,光波的复振幅记为 E1,另一部分经物体 O 表面反射后投射到记录介质 H 上,光波的复
振幅记为 E2。如图 17—2 所示。其中
E1 = A1 cos(2πft + ϕ1 )
(17—1)
在传统的全息方法中,将振动信 息记录在全息干板上,进而做分析和 处理。从式(17—5)式和(17—6) 式可知:当 ρ = 0 时,I 值取极大值, 即振幅为零的地方光强最亮,也就是 振动节线处最亮。随着振幅变大,光 强衰减开始很快,后来变得缓慢,同 时,条纹的对比度也变差。
图 17—4 第一类零阶贝塞尔函数的平方分布
间隔δt 中,假定 P 移动到 P′ 的距离为 Vδt。 在光程中周期数将减少为
− δn
=
PN λ
+
PN ′ λ ′′
(17—7)
其中 PN 和 PN′分别是向 SP 和 PO 作的垂线,PP′为无限小,λ 和λ″ 是散射前后的波长。
(17—7)可表示为
− δn
=
Vδt
cos θ1 λ
+
Vδt
cos θ 2 λ ′′
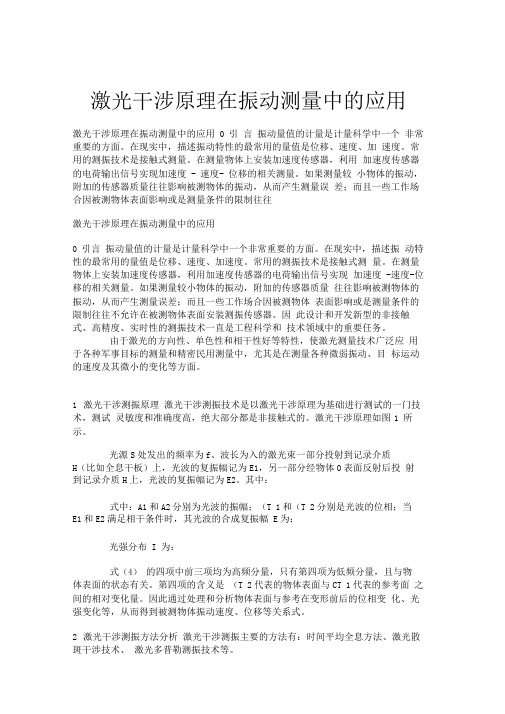
本节中介绍的两个应用实例如下,图 17—5 表示的是周边固支圆板 I 型、II 型和 I II 混合型 振型。其中的亮条纹为节线位置。图 17—6 所示的是吉它的振型。
图 17—6 吉它的振动模态
为了克服时间平均全息法的缺点,激光全息频闪方法采用与振动物体频率同步的激光频 闪照明方法,在全息记录过程中,只记录物体的两个状态(振幅的极大值和极小值)。再现 时,使这两个状态干涉产生相对位移分布,获得按余弦平方分布的等振幅线干涉条纹。该干
(17—12)
对于光波沿反向散射时,即光源和光波接收器件为一体时(如图 17—9 所示),S=O,θ 1= -θ 2。
因此:
S
fNP
θ1 V
P′ θ2
N′ f + ∆fD
O
f
S f + ∆fD
P
θ 1=θ 2 V
图 17—8 散射多普勒频移
图 17—9 激光多普勒(Doppler)效应
V O λ为激光波长,当θ = 0 时,
电子散斑干涉技术(ESPI-electronic speckle pattern interferometry)测振在图像记录和自 动化处理方面具有明显的优势。ESPI 测量振动时采用的最方便的方法也是时间平均法,但 时间平均法得到的由第一类零阶贝塞尔函数表征的散斑干涉条纹,由于贝塞尔函数随自变量 的增加迅速衰减的特征和散斑噪音的存在,振动条纹的质量明显低于静态变形的余弦条纹。 数字散斑(DSPI)测振仪存在抗干扰能力差,测量质量不高,难以小型化,难以用于复杂 工作环境等缺点。图 17—7 所示的是用时间平均法 ESPI 测量传统乐器 Veena 振动的图像。
光强分布为 I I = E 2 = A12 cos 2 (2πft + ϕ1 ) + A2 2 cos 2 (2πft + ϕ2 ) + 2 A1 A2 cos(2πft + ϕ1 ) cos(2πft + ϕ2 ) = A12 cos 2 (2πft + ϕ1) + A2 2 cos 2 (2πft + ϕ2 ) + A1 A2 cos(4πft + ϕ1 + ϕ2 ) + A1 A2 cos(ϕ1 − ϕ2 )
v x
u
个位移分量的时间函数, u(x, y, z, t), v(x, y, z,t), w(x, y, z,t) 。 在 非 接触式测量方法中,各种激光测量方法, 因原理不同,可以分别实现物体表面的点
w z
图 17—1 物体的振动及坐标系
测量或物体表面的面(场)测量,并且激
光束的入射方向与物体的表面法线方向应满足一定的几何要求。
图 17—2 激光干涉原理
相变化、光强变化等,从而实现高精
度的振动位移测量。
17.3 时间平均全息方法
(17—3) (17—4)
激光测振以其非接触测量、精度高等优点,已在振动测量领域得到广泛应用。在全息干
涉计量学中,时间平均全息方法首先在 1965 年由 Powell 提出。可以测量和分析物体的微
幅振动。对于在某一稳定频率下作简谐振动的物体,用连续激光照射,并在比振动周期长得
因此,直接测量多普勒频率∆fD 是不可能的。而是当多普勒频移足够大时,可以借助于高分 辨率的法布里-珀罗干涉仪 ( Fabry-Perot ) 进行测量。在一般情况下,大多数物体的振动速
度所引起的多普勒频移在几十千赫—几十兆赫,超出了光谱仪的分辨率。这时需要借助于光
学差拍及参考光技术来测量。
光束 ZZ
式(17—4)的四项中,前三项均为高
频分量。只有第四项为低频分量,且 与物体表面的状态有关。第四项的含 义是ϕ2 所代表的物体表面与ϕ1 所代表 的参考面之间的相对变化量。在激光 位移测量方法 ( 全息干涉、激光散 斑、云纹干涉、激光多普勒测振等 )
S E1
O E2
H
中,都是通过处理和分析物体表面与 参考面(物体表面)在变形前后的位
(17—16)
由(17—15)式、(17—16)式解得速度分量为
Vx
= Vzx
− Vz cosθ sin θ
(17—17)
475
PDF created with pdfFactory Pro trial version
Vy
=
Vzy
− Vz cosψ sin ψ
∆f D
=
2Vf c
cos θ
= 2V λ
cos θ
∆f D= 2Vf c= 2V λ(17—13) (17—14)
由此可知,激光多普勒测振原理就是基于测量从物体表面微小区域反射回的相干激光光波的
多普勒频率∆fD, 进而确定该测点的振动速度 V。
17.4.2 激光三维测振原理
工程中的许多结构和部件的振动是三维的。即物体表面某一点的振动(速度)可被分解
PDF created with pdfFactory Pro trial version
往设置成
θ 1=θ 2=0,则(7—5)式变为
I
=
KJ
0
2
(
4π λ
V (x,
y))
当 V(x, y)=0, I = Imax 时,
对应的是亮条纹。在该条纹的位置
(17—6)
多的时间内在全息干版上曝光,可将物体表面所反射的光与未作位相调制的参考光相叠加,
将两束光的干涉图记录在全息干版上。其再现像由反映节线和等振幅线组成的干涉条纹来表
示振幅分布。这就是时间平均全息方法的测振原理。其时间平均全息图的重现像的光强度按
零阶贝塞尔函数的平方分布。
I = KJ 02 (ρ)
(17—5)
成两个面内分量(Vx,Vy )和一个离面分量 Vz。当进行三维激光振动测量时,需要使用三
束激光照射被测点。如图 17—10 所示。在光路布置中,光束 ZZ 沿 Z 轴方向,用于测量 Vz ,
从而可得
Vzx = Vz cosθ + Vx sin θ
(17—15)
Vzy = Vz cosψ + Vy sinψ