四旋翼飞行器的结构形式和工作原理
四轴 原理

四轴原理
四轴原理即为四旋翼飞行器的工作原理。
四旋翼飞行器由四个相对对称的旋翼组成,每个旋翼都由一个电动机驱动,并通过控制电路进行精确的调节。
四轴飞行器的飞行原理是通过对四个旋翼的转速进行精确控制,实现悬停、上升、下降、前进、后退、向左、向右平移以及旋转等多种飞行动作。
具体原理如下:
1. 升力平衡原理:四个旋翼产生的升力将飞行器维持在空中,飞行器的重力与升力平衡,实现悬停状态。
2. 空气动力学平衡原理:四个旋翼的转速可以通过电机转速控制器进行精确调节,进而调节各个旋翼产生的升力大小,实现空气动力学平衡。
3. 控制算法原理:通过搭载的传感器(如加速度计、陀螺仪、磁力计等)实时监测飞行器的姿态信息,将监测到的数据传输给飞行控制器。
飞行控制器根据姿态信息计算出相应的控制指令,通过电调调节四个旋翼的转速,控制飞行器的姿态。
如需向前飞行,则增加后面两个旋翼的转速,减小前面两个旋翼的转速,使飞行器倾斜向前。
类似地,对其他方向的飞行也是通过对相应旋翼转速的调节实现的。
4. 电源与电路原理:四轴飞行器通过电池为电动机提供能量,电路控制系统将飞行器的控制信号转化为电流和电压输出供电给电动机。
通过对四个旋翼的转速进行精确控制,在合适的气动力学平衡和姿态控制下,四轴飞行器能够实现精确悬停、稳定飞行及各种飞行动作,具有广泛的应用前景。
四旋翼飞行器结构和原理

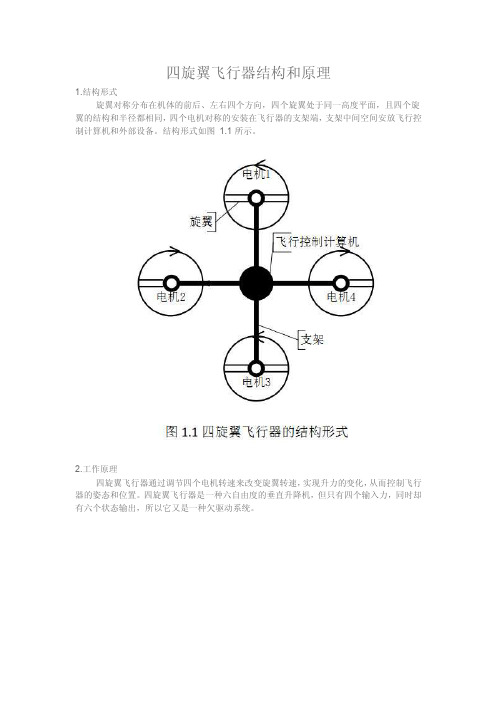
四旋翼飞行器结构和原理1.结构形式旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。
结构形式如图1.1所示。
.工作原理四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。
四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
四旋翼飞行器的电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
在上图中,电机1和电机3作逆时针旋转,电机2和电机4作顺时针旋转,规定沿x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
(1)垂直运动:同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。
当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。
(2)俯仰运动:在图(b)中,电机1的转速上升,电机3 的转速下降(改变量大小应相等),电机2、电机4 的转速保持不变。
由于旋翼1 的升力上升,旋翼3 的升力下降,产生的不平衡力矩使机身绕y 轴旋转,同理,当电机1 的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
(3)滚转运动:与图b 的原理相同,在图c 中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕x 轴旋转(正向和反向),实现飞行器的滚转运动。
(4)偏航运动:旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。
四轴飞行器的飞行原理

四轴飞行器的飞行原理四轴飞行器,作为一种现代飞行器形式,具有独特的设计和飞行原理。
其飞行原理主要基于空气动力学和控制理论。
四轴飞行器采用四个旋翼组件来产生升力和推力,并通过控制这些旋翼的转速和角度来实现飞行动作。
升力产生四轴飞行器的主要飞行模式是垂直起降,因此需要产生足够的升力来使其脱离地面并维持空中飞行。
四轴飞行器的四个旋翼通过旋转产生气流,这些气流在旋翼叶片的空气动力学作用下产生升力。
旋翼的升力与其旋转的速度成正比,因此控制旋翼的转速可以调节飞行器的升力。
姿态控制除了产生升力,四轴飞行器还需要控制其姿态,即控制其在空中的方向和倾斜角度。
四轴飞行器通过调节各个旋翼的推力和速度来实现姿态控制。
例如,如果要向前飞行,可以增加后方旋翼的推力或减小前方旋翼的推力,以产生向前的倾斜力矩。
稳定性控制为了保持飞行器在空中的稳定性,四轴飞行器需要进行实时的稳定性控制。
通常采用陀螺仪和加速度计等传感器来监测飞行器的姿态和运动状态,然后通过飞行控制系统来计算并调节旋翼的转速和姿态,使飞行器保持平稳飞行。
飞行模式四轴飞行器可以实现多种飞行模式,如手动控制飞行、自动悬停和自动返航等。
在手动控制模式下,飞行器由操纵员通过遥控器进行操控。
在自动悬停和自动返航模式下,飞行器通过预先设定的飞行控制算法和传感器数据来实现自主飞行。
综上所述,四轴飞行器的飞行原理基于空气动力学和控制理论,并通过旋翼产生升力、姿态控制和稳定性控制来实现飞行动作。
其独特的设计和飞行原理使其成为一种灵活多用途的飞行器形式,广泛应用于航拍、搜救、科研等领域。
四旋翼飞行器结构

四旋翼飞行器结构1. 概述四旋翼飞行器是一种利用四个对称排列的旋翼进行垂直起飞、悬停和操纵的飞行器。
其优势包括垂直起降、悬停能力强、灵活机动、飞行稳定等。
在无人机领域中,四旋翼飞行器已经得到了广泛应用,如航拍摄影、应急救援、农业植保等。
2. 结构组成四旋翼飞行器的结构组成主要包括机身、四个旋翼、电池、控制系统等组件。
2.1 机身四旋翼飞行器的机身是整个飞行器的主体部分,起到支撑和连接其他组件的作用。
通常由轻质材料制成,如碳纤维、玻璃纤维等,以提高飞行器的强度和降低重量。
机身的设计通常考虑空气动力学性能、结构强度和易制造性。
2.2 旋翼四旋翼飞行器通过四个对称排列的旋翼进行飞行。
旋翼包括电动机、螺旋桨和支撑梁等部分。
电动机作为旋翼的动力源,驱动螺旋桨旋转产生升力。
螺旋桨通过变化旋转速度和角度来控制飞行器的悬停、升降、前进、转向等动作。
支撑梁连接旋翼和机身,起到支撑和传递动力的作用。
2.3 电池四旋翼飞行器的电池是提供动力的重要组成部分。
通常使用锂电池作为飞行器的能源来源,具有高能量密度和长飞行时间的优势。
电池的选择应考虑飞行器的重量和飞行时间的需求,并且要遵循安全使用和充电的原则。
2.4 控制系统四旋翼飞行器的控制系统包括飞行控制器和遥控器。
飞行控制器是飞行器的大脑,通过接收遥控器的信号和传感器的数据,计算出飞行器的状态和控制指令,并控制旋翼的转速和角度。
遥控器是操作飞行器的手持装置,通过无线信号与飞行控制器进行通信,传输操纵指令。
3. 工作原理四旋翼飞行器通过控制旋翼的转速和角度来产生升力和推力,从而实现飞行。
通过改变旋翼的转速差异,可以实现飞行器的前进、转向和悬停动作。
飞行控制器根据遥控器输入和传感器反馈的数据,计算出适当的转速和角度,并通过电调调节电动机的输出,控制旋翼的运动。
4. 稳定性控制四旋翼飞行器的稳定性控制是实现飞行器平稳飞行的关键。
通过加速度计、陀螺仪、磁力计等传感器,飞行控制器可以感知飞行器的姿态和运动状态。
四旋翼飞行器的工作原理
四旋翼飞行器的工作原理
四旋翼飞行器,作为一种无人机类型,由四个电动马达驱动,每个马达带动一
个螺旋桨,通过旋转螺旋桨产生的升力和推力来实现飞行。
在四个螺旋桨的作用下,四旋翼飞行器可以进行上升、下降、前进、后退、向左、向右移动等各种飞行动作。
结构组成
四旋翼飞行器的主要结构包括机架、电机、螺旋桨、飞控以及电池等部件。
其中,电机和螺旋桨的组合负责提供飞行器的动力,飞控系统则控制着电机的转速,从而操控四旋翼飞行器的姿态和飞行方向。
工作原理
四旋翼飞行器的工作原理主要是通过控制四个电动马达的转速,来调节四个螺
旋桨产生的推力大小和方向,在空气中形成动力平衡,从而实现飞行。
当四个电动马达以相同的速度旋转时,四旋翼飞行器将悬停在空中;当电机转速有所不同时,四旋翼飞行器就会产生倾斜,从而实现前进、后退、向左或向右移动。
升力和推力
四旋翼飞行器的飞行靠的是螺旋桨产生的升力和推力。
当四个螺旋桨以适当的
速度旋转时,它们将向下推动大量的空气,产生向上的升力。
通过协调四个螺旋桨的转速和方向,四旋翼飞行器可以在空中保持平衡,实现稳定的飞行。
飞控系统
飞控系统是四旋翼飞行器的大脑,负责控制电机的转速和姿态,以实现飞行器
的稳定飞行。
飞控系统通过传感器感知四旋翼飞行器的姿态和环境信息,然后通过内置的控制算法计算出最优的控制指令,控制电机的运行状态,确保飞行器能够稳定飞行。
结语
总的来说,四旋翼飞行器的工作原理是通过控制螺旋桨产生的升力和推力来实
现飞行。
通过合理设计机身结构和配备飞控系统,四旋翼飞行器能够实现各种复杂的飞行动作,是一种十分便捷和灵活的无人机类型。
四旋翼飞行器无人机结构和原理
四旋翼飞行器结构和原理1.结构形式旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。
结构形式如图 1.1所示。
2.工作原理四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。
四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
四旋翼飞行器的电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
在上图中,电机1和电机3作逆时针旋转,电机2和电机4作顺时针旋转,规定沿x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
(1)垂直运动:同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。
当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。
(2)俯仰运动:在图(b)中,电机1的转速上升,电机 3 的转速下降(改变量大小应相等),电机2、电机 4 的转速保持不变。
由于旋翼1的升力上升,旋翼 3 的升力下降,产生的不平衡力矩使机身绕y 轴旋转,同理,当电机1 的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
(3)滚转运动:与图b 的原理相同,在图 c 中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕x 轴旋转(正向和反向),实现飞行器的滚转运动。
四轴旋翼式无人机工作原理
四轴旋翼式无人机工作原理四轴旋翼式无人机是一种常见的无人机类型,其工作原理基于四个旋翼的旋转产生升力和推力,从而实现飞行。
本文将从以下几个方面详细介绍四轴旋翼式无人机的工作原理:旋翼的构造、飞行控制系统、动力系统、悬停与平稳飞行、转向与翻滚等。
一、旋翼的构造四轴旋翼式无人机的四个旋翼分别安装在飞行器的四个角落,每个旋翼都由一个电机驱动。
旋翼的叶片通常采用碳纤维材料制成,以减轻重量并提高强度。
旋翼的叶片数量可以根据实际需求进行调整,常见的有4片、6片、8片等。
旋翼的旋转方向可以是顺时针或逆时针,但四个旋翼的旋转方向必须保持一致,以保证飞行器的稳定性。
二、飞行控制系统飞行控制系统是四轴旋翼式无人机的核心部分,它负责接收遥控器发出的控制信号,并将其转换为电机的控制信号。
飞行控制系统通常包括以下几个部分:1. 接收机:接收遥控器发出的无线电信号,并将其转换为电信号。
2. 飞控板:对接收到的信号进行处理,生成电机的控制信号。
3. 电机:根据飞控板的控制信号,驱动旋翼旋转。
4. 传感器:实时监测飞行器的姿态、高度、速度等信息,并将这些信息反馈给飞控板。
三、动力系统四轴旋翼式无人机的动力系统主要包括电机和电池。
电机负责驱动旋翼旋转,产生升力和推力;电池为电机提供电能。
电机的选择需要考虑飞行器的重量、尺寸、飞行速度等因素。
常见的电机有无刷电机和有刷电机,其中无刷电机具有更高的效率和更长的使用寿命。
电池的选择需要考虑飞行器的续航时间、重量等因素。
常见的电池有锂聚合物电池和锂离子电池,其中锂聚合物电池具有更高的能量密度和更好的安全性能。
四、悬停与平稳飞行四轴旋翼式无人机在起飞前需要进行悬停测试,以确保飞行器的稳定性。
悬停测试的方法是将飞行器放置在地面上,使其四个旋翼的升力之和等于重力,从而使飞行器保持静止。
在悬停状态下,飞行器的高度可以通过调整四个旋翼的升力来实现。
平稳飞行是指飞行器在飞行过程中保持稳定的姿态和速度。
四旋翼飞行器原理及实现
四旋翼飞行器原理及实现四旋翼飞行器(Quadcopter)是一种通过四个螺旋桨提供推力来实现垂直起降和水平飞行的飞行器。
它具有灵活性高、悬停稳定和机动能力强等特点,因此在航拍、农业喷洒、抢险救援等领域得到广泛应用。
原理四旋翼飞行器的原理基于螺旋桨提供的升力和扭矩。
四个螺旋桨分别固定在飞行器的四个支架上,两个螺旋桨按照同一方向旋转,另外两个按照相反方向旋转。
通过控制每个螺旋桨的转速,可以实现飞行器的上升、下降、向前、向后、向左、向右的运动。
四旋翼飞行器的飞行控制系统通常由飞控模块、传感器(加速度计、陀螺仪、磁力计)、遥控器和电调等部件组成。
飞控模块接收传感器信息和遥控器指令,经过算法计算得出螺旋桨的转速,从而实现对飞行器的控制。
实现材料准备搭建四旋翼飞行器需要准备以下材料: - 四个无刷直流电机 - 四个螺旋桨 - 电调- 飞控模块 - 电池 - 遥控器 - 机架 - 电子速度控制器搭建步骤1.将四个无刷直流电机安装在机架的四个支架上。
2.安装螺旋桨在每个电机上,确保两个螺旋桨按照同一方向旋转,另外两个按照相反方向旋转。
3.连接电调和电机,确保正确连接。
4.将飞控模块安装在机架上,并连接传感器和电调。
5.安装电池和遥控器,确保电路连接正确。
6.完成搭建后,对四旋翼飞行器进行调试和校准。
飞行控制控制四旋翼飞行器飞行的关键在于飞控系统的控制。
通过遥控器发送指令给飞控模块,调整螺旋桨的转速,可以实现飞行器的姿态控制、高度控制和位置控制。
同时,传感器也可以提供飞行器的姿态信息,帮助飞控系统实时调整螺旋桨的转速,保持飞行器的稳定飞行。
结语四旋翼飞行器的原理和实现涉及到力学、电子、控制等多方面的知识,在搭建和飞行过程中需要仔细操作和谨慎调试。
通过不断学习和实践,可以更好地理解四旋翼飞行器的运作原理,实现更加灵活、稳定的飞行。
愿四旋翼飞行器爱好者们在探索飞行器世界的过程中获得乐趣和成长!。
四旋翼飞行原理
四旋翼飞行原理四旋翼是一种多旋翼飞行器,由四个旋翼组成,每个旋翼都由一个电动机驱动,通过变速器和螺旋桨传动力量,从而产生升力和推力,使飞行器能够在空中悬停、上升、下降、前进、后退、左右移动等多种飞行动作。
四旋翼飞行器具有结构简单、稳定性好、操控灵活、适应性强等优点,被广泛应用于航拍、物流、农业、救援等领域。
四旋翼飞行原理主要涉及到空气动力学、力学、电子技术等多个学科,下面将从以下几个方面进行介绍。
一、旋翼的升力和推力旋翼是四旋翼飞行器的核心部件,它通过旋转产生升力和推力,使飞行器能够在空中飞行。
旋翼的升力和推力与旋翼的转速、叶片的形状、叶片的数量、叶片的角度等因素有关。
一般来说,旋翼的转速越快,产生的升力和推力就越大;叶片的形状和数量也会影响旋翼的性能,一般采用空气动力学优化设计的叶片能够提高旋翼的效率;叶片的角度也会影响旋翼的性能,一般来说,叶片的攻角越大,产生的升力和推力就越大,但是过大的攻角会导致旋翼失速或者失控。
二、四旋翼的稳定性四旋翼飞行器的稳定性是其能够在空中悬停、上升、下降、前进、后退、左右移动等多种飞行动作的基础。
四旋翼的稳定性主要涉及到飞行器的重心、旋翼的转速、旋翼的位置、旋翼的控制等因素。
一般来说,飞行器的重心应该位于四个旋翼的中心位置,这样才能够保证飞行器的稳定性;旋翼的转速应该保持一定的平衡,避免出现旋翼失速或者失控的情况;旋翼的位置也会影响飞行器的稳定性,一般来说,旋翼的位置越高,飞行器的稳定性就越好;旋翼的控制也是保证飞行器稳定性的关键,通过控制旋翼的转速和角度,可以实现飞行器的各种动作。
三、四旋翼的操控四旋翼飞行器的操控主要涉及到遥控器、飞控系统、传感器等多个方面。
遥控器是操控飞行器的主要工具,通过遥控器可以控制飞行器的上升、下降、前进、后退、左右移动等动作;飞控系统是飞行器的大脑,通过飞控系统可以实现飞行器的自动控制、姿态稳定、高度控制等功能;传感器是飞行器的感知器,通过传感器可以感知飞行器的姿态、高度、速度等信息,从而实现飞行器的自动控制和稳定。
四旋翼飞行器结构和原理
四旋翼飞行器结构和原理1.结构形式旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。
结构形式如图1.1所示。
.工作原理四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。
四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
四旋翼飞行器的电机 1和电机 3逆时针旋转的同时,电机 2和电机 4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
在上图中,电机 1和电机 3作逆时针旋转,电机 2和电机 4作顺时针旋转,规定沿 x 轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
(1)垂直运动:同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。
当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。
(2)俯仰运动:在图(b)中,电机1的转速上升,电机3 的转速下降(改变量大小应相等),电机2、电机4 的转速保持不变。
由于旋翼1 的升力上升,旋翼3 的升力下降,产生的不平衡力矩使机身绕y 轴旋转,同理,当电机1 的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
(3)滚转运动:与图b 的原理相同,在图c 中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕x 轴旋转(正向和反向),实现飞行器的滚转运动。
(4)偏航运动:旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
四旋翼飞行器的结构形式和工作原理
1.结构形式
直升机在巧妙使用总距控制和周期变距控制之前,四旋翼结构被认为是一种最简单和最直观的稳定控制形式。
但由于这种形式必须同时协调控制四个旋翼的状态参数,这对驾驶员认为操纵来说是一件非常困难的事,所以该方案始终没有真正在大型直升机设计中被采用。
这里四旋翼飞行器重新考虑采用这种结构形式,主要是因为总距控制和周期变距控制虽然设计精巧,控制灵活,但其复杂的机械结构却使它无法再小型四旋翼飞行器设计中应用。
另外,四旋翼飞行器的旋翼效率相对很低,从单个旋翼上增加拉力的空间是非常有限的,所以采用多旋翼结构形式无疑是一种提高四旋翼飞行器负载能力的最有效手段之一。
至于四旋翼结构存在控制量较多的问题,则有望通过设计自动飞行控制系统来解决。
四旋翼飞行器采用四个旋翼作为飞行的直接动力源,旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,旋翼1和旋翼3逆时针旋转,旋翼2和旋翼4顺时针旋转,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。
四旋翼飞行器的结构形式如图1.1所示。
图1.1四旋翼飞行器的结构形式
2.工作原理
典型的传统直升机配备有一个主转子和一个尾桨。
他们是通过控制舵机来改变螺旋桨的桨距角,从而控制直升机的姿态和位置。
四旋翼飞行器与此不同,是通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。
由于飞行器是通过改变旋翼转速实现升力变化,这样会导致其动力部稳定,所以需要一种能够长期保稳定的控制方法。
四旋翼飞行器是一种六自由度的垂直升降机,因此非常适合静态和准静态条件下飞行。
但是四旋翼飞行器只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
图1.2四旋翼飞行器沿各自由度的运动
四旋翼飞行器结构形式如图所示,电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
与传统的直升机相比,四旋翼飞行器有下列优势:各个旋翼对机身所施加的反扭矩与旋翼的旋转方向相反,因此当电机1和
电机3逆时针旋转的同时,电机2和电机4顺时针旋转,可以平衡旋翼对机身的反扭矩。
四旋翼飞行器在空间共有6个自由度(分别沿3个坐标轴作平移和旋转动作),这6个自由度的控制都可以通过调节不同电机的转速来实现。
基本运动状态分别是:(1)垂直运动;(2)俯仰运动;(3)滚转运动;(4)偏航运动;(5)前后运动;(6)侧向运动。
在图3.2中,电机1和电机3作逆时针旋转,电机2和电机4作顺时针旋转,规定沿x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
(1)垂直运动:垂直运动相对来说比较容易。
在图中,因有两对电机转向相反,可以平衡其对机身的反扭矩,当同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿z轴的垂直运动。
当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。
保证四个旋翼转速同步增加或减小是垂直运动的关键。
(2)俯仰运动:在图(b)中,电机1的转速上升,电机3的转速下降,电机2、电机4的转速保持不变。
为了不因为旋翼转速的改变引起四旋翼飞行器整体扭矩及总拉力
改变,旋翼1与旋翼3转速该变量的大小应相等。
由于旋翼1的升力上升,旋翼3的升力下降,产生的不平衡力矩使机身绕y轴旋转(方向如图所示),同理,当电机1的转速下降,电机3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
(3)滚转运动:与图b的原理相同,在图c中,改变电机2和电机4的转速,保持电机1和电机3的转速不变,则可使机身绕x轴旋转(正向和反向),实现飞行器的滚转运动。
(4)偏航运动:四旋翼飞行器偏航运动可以借助旋翼产生的反扭矩来实现。
旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的来年各个旋翼转动方向相同。
反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。
在图d中,当电机1和电机3的转速上升,电机2和电机4的转速下降时,旋翼1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在富余反扭矩的作用下绕z轴转动,实现飞行器的偏航运动,转向与电机1、电机3的转向相反。
(5)前后运动:要想实现飞行器在水平面内前后、左
右的运动,必须在水平面内对飞行器施加一定的力。
在图e 中,增加电机3转速,使拉力增大,相应减小电机1转速,使拉力减小,同时保持其它两个电机转速不变,反扭矩仍然要保持平衡。
按图b的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动。
向后飞行与向前飞行正好相反。
当然在图b图c 中,飞行器在产生俯仰、翻滚运动的同时也会产生沿x、y 轴的水平运动。
(6)倾向运动:在图f中,由于结构对称,所以倾向飞行的工作原理与前后运动完全一样。