兆瓦级风电机组偏航系统的设计
兆瓦级风电机组变桨系统的设计与实现

兆瓦级风电机组变桨系统的设计与实现武汉数字工程研究所、湖北宜昌供电局的研究人员李晓斌、李国成,在2015年第1期《电气技术》杂志上撰文,详细分析了变桨距系统的设计原理和组成,并在此基础上以非线性PID算法为控制核心,以Profibus总线和CAN总线作为通讯, 以超级电容作为后备电源,设计了兆瓦级风电机组变桨距系统,对变桨系统软件开发所涉及的运行模式划分为五类,并将研究结果应用于国内某风场,结果表明该系统满足风电机组对变桨系统位置和精度控制的要求。
1概述风力发电作为一种成熟的新型清洁能源,已经更多地被实际电网所吸纳。
但由于风能具有动态和不确定性,因此要求风力发电机组对所获取的风能进行实时控制,风电变桨距系统用来对风能进行控制,如何设计快速响应、高效可靠的变桨距系统就成为整机设计和运行的关键所在。
为了保障风力发电机组运行的安全,风电机组必须对获取的风能进行控制,传统定桨距风机是通过设计变桨叶片的失速特性来控制风机对风能的获取。
随着风机向大型化方向发展,现场总线控制技术、交直流电机数字控制技术的发展,风电机组风能获取控制已逐步转向为变桨距,即由过去的定桨失速控制转为变桨变速控制,变桨距控制技术已经成为大型风电机组控制的主流技术。
2风电变桨距系统原理(略)3变桨系统总体组成(略)变桨距系统载荷具有一定的不稳定特性。
系统要求变桨距角度改变响应快,变桨距静态起动力矩大,并要求能承受可能在运行过程中呈现的突发载荷。
一般变桨距系统由变桨电机、减速箱、变桨控制器、变桨驱动器、备用电源以及辅助接近开关,限位开关等组成。
根据上述要求,本文所设计的变桨系统采用三桨叶独立控制方式,如图2所示。
变桨电机的末端安装绝对值编码器,变桨系统每个叶片设置2度和88度的接近开关,91度和96度的限位开关。
主控安全链和变桨轮毂安全链之间具有硬接口连接,主控安全链通过1对24VDC信号与变桨轮毂安全链连接,一旦主控安全链失电,就会通过24VDC信号缺失告知每个变桨距柜主控安全链故障。
风力发电机偏航传动系统的设计与分析
湘潭大学兴湘学院毕业设计说明书题目:风力发电机偏航传动系统的设计与分析专业:机械设计制造及其自动化学号:15*名:***指导教师:***完成日期:湘潭大学兴湘学院毕业论文(设计)任务书论文(设计)题目:风力发电机偏航传动系统的设计与分析学号:15 姓名:李超众专业:机械设计制造及其自动化指导教师:彭锐涛系主任:刘柏希一、主要内容及大体要求偏航系统是风力发电机组特有的伺服系统。
它主要有两个功能:一是使风轮跟踪变化稳定的风向;二是当风力发电机组由于偏航作用,机舱内引出的电缆发生缠绕时,自动解缆。
偏航系统是一个随动系统,风向仪将收集的信号传送给机舱柜的PLC的I/O 板,计算10分钟平均风向,与偏航角度绝对值编码器比较,输出指令驱动四台偏航电机(带失电制动),将机头朝正对的风向调整,并记录当前调整的角度,调整完毕电机停转并启动偏航制动。
主要内容:1. 了解大中型风力发电机系统的结构和原理;2. 熟悉风力发电机偏航系统的工作原理及结构;3. 基于三维设计软件SolidWorks 完成减速箱偏航齿轮及轴承的设计,并运用SolidWorks/motion模块对包括这些零部件的偏航系统进行动力学仿真。
大体要求:字数要求:8000字以上图纸在两张A0以上。
二、重点研究的问题该设计的重点在于设计行星轮减速器;对内部零部件如行星轮、太阳轮、轴、内齿圈等进行设计计算并对轴承键等进行安全校核。
运用SolidWorks对其进行三维造型并运用三维造型对其进行运动仿真。
三、进度安排四、应搜集的资料及主要参考文献[1].程乃士主编.减速器和变速器设计与选用手册[M].北京:机械工业出版社,2007.[2].廖念钊,古莹蓭,莫雨松等主编.互换性与技术测量[M].北京:中国计量出版社,2007.[3].濮良贵,纪名刚主编.机械设计(第八版)[M].北京:高等教育出版社,2006.[4].徐灏主编.机械设计手册[M].北京:机械工业出版社,2006.[5].成大先主编.机械设计手册单行本[M].化学工业出版社,2004.[6].宫靖远主编.风电工程技术手册[M].北京:机械工业出版社,2007.[7].Erich Hau 编著.Wind [M].2005.[8].陈超祥主编.SolidWorks Motion运动仿真教程[M].北京:机械工业出版社,2012.[9].陈超祥主编.SolidWorks Simulation基础教程[M].北京:机械工业出版社,2012.[10].CAD\CAM\CAE技术联盟主编.SolidWorks 2012中文版从入门到精通[M].北京:清华大学出版社,2012.[11].姚兴佳主编.风力发电技术讲座[M].沈阳工业大学风能技术研究所,2006.湘潭大学兴湘学院毕业论文(设计)评阅表学号15 姓名李超众专业机械设计制造及其自动化毕业论文(设计)题目:风力发电机偏航传动系统的设计与分析湘潭大学兴湘学院毕业论文(设计)鉴定意见学号:15 姓名:李超众专业:机械设计制造及其自动化毕业论文(设计说明书)40 页图表15 张目录[摘要]本次毕业设计的任务是风力发电机偏航传动系统的设计与分析,通过设计计算和校核计算,完成了所有的数据,并绘制出了图纸。
兆瓦级风机偏航系统仿真分析与优化
仿 真结 果为依 据 , 进 行铺 层优 化设 计 , 降低 了叶 片应 力 , 提 高 了使 用寿命 。 关键 词 : 风机 ; 玻璃 钢 叶片 ; 疲 劳寿 命 ; 铺 层优 化
中图分 类号 : T K 8 3 文 献标识 码 : A 文章 编号 : 2 0 9 5— 5 0 9 X( 2 0 1 4 ) 0 8— 0 0 1 8— 0 4
随着全 球 温室效 应 的 1 3 益 严重 和石 油 、 煤 炭等
不可再 生 资源 的 1 3益 匮乏 , 世界 各 国正 1 3益重 视新 兴绿 色能源 的 发 展 。风 力 发 电 以其 无 污 染性 和可 再 生 性受 到普 遍重 视 … 。 由于风 向总 是 时 刻变 化
的, 因此偏 航控 制 系统是 风 电机 组实 现高 效稳 定运 行 的关 键 。主 动偏 航 控 制 系统 能 够 控 制 风 电机 组 始终 跟踪 变化 的风 向来 实现最 佳对 风 , 提 高风 力发
D O I : 1 0 . 3 9 6 9 / j . i s s n . 2 0 9 5— 5 0 9 X . 2 0 1 4 . 0 8 . 0 0 5
兆 瓦 级 风 机 偏 航 系 统 仿 真 分 析 与 优 化
袁 溟‘ , 杨 俊 , 武 美萍
2 0 0 4 3 6 )
2 1 4 1 2 2 )
收 稿 日期 2 0 1 4—0 7— 0 3
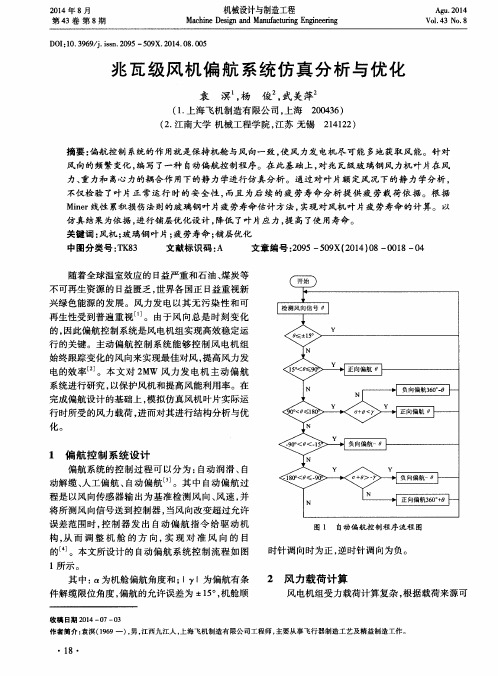
图1 自动 偏 航 控 制 程 序 流程 图
时针 调 向时为 正 , 逆 时针 调 向为负 。
2 风力载荷计算
风 电机组 受力 载荷 计算 复杂 , 根据 载荷 来源可
作者简介 : 袁溟( 1 9 6 9 一) , 男, 江西九江人 , 上海飞机制造有限公 司工程师 , 主要从事飞行器制造工艺及精益制造 工作 。
MW级风力发电机组偏航控制系统设计开题报告(可编辑修改word版)
本科生毕业设计(论文)开题报告题目:MW 级风力发电机组偏航控制系统设计姓名:陈晓学号:200806040201指导教师:陈景文班级:电气工程及其自动化081所在院系:电气与信息工程学院毕业设计(论文)开题报告表本课题的研究内容、方法、手段及预期成果1、本课题的研究内容:(1)熟悉风力发电机组系统的基本组成及功能。
(2)深入了解偏航控制系统的功能和原理,掌握偏航控制系统的结构和驱动机构。
(3)分析偏航过程并推导算法流程。
(4)对偏航控制系统分别进行软件和硬件设计。
2、本课题的研究方法与手段:(1)通过对风力发电机组尤其是偏航控制系统功能能和原理的研究,深入了解偏航控制系统在风力发电机组中的作用及其结构。
(2)为有效地设计偏航控制系统,还需比较各种对风控制器的优缺点,从而找出一种比较适当的控制算法,设计控制器,画出流程图。
并采用仿真软件,针对双馈风力发电机组进行仿真实验,从而对比此方法是否有效。
(3)由于启动和并网的需要,大型风力发电机组需要根据风速仪、风向标等传感器数据,对风、制动、开闸并确定启动,达到同步转速一段时间后,进行并网操作,开始发电。
这就要求只有在风向变化时,才需要偏航,而风速变化引起功率变化时,偏航系统不需要动作。
所以风速变化在程序设计时需要考虑。
(4)随着系统的控制性能不断提升,采用单片机作为偏航控制系统已经逐渐被性能更好、处理速度更快、是实行更高的DSP 和嵌入式系统所代替。
因此本设计硬件电路系统准备采用DSP 作为系统偏航控制器。
3、本课题的预期成果:(1)熟悉风力发电技术。
(2)基于新型算法综合考虑后进行偏航控制系统的软件设计。
(3)偏航控制系统与风力发电机组的控制系统相互配合,使风轮始终处于迎风状态,提高风力发电机的发电效率,保障风力发电机组的安全运行。
究类;理论研究类;软件工程类。
2、此表由学生填写,交指导教师签署意见后方可开题。
本科生毕业设计(论文)开题报告考核一、指导教师对开题报告的评语:指导教师2013 年 月 日二、开题报告答辩评语及成绩:答辩小组负责人2013 年 月 日成绩。
MW级风力发电系统偏航控制器的硬件设计

MW级风力发电系统偏航控制器的硬件设计关 开(华北电力大学,河北石家庄 050000) 摘 要:本文中利用PLC 作为偏航控制器,单片机为主的外围电路作为P LC 的信号转换和处理单元。
通过对各种信号的转换、处理,匹配成PLC 能够接受的信号,再通过P LC 实现的偏航控制程序,输出相应的控制信号控制执行机构,来达到自动对风的目的。
关键词:风能;偏航控制器;单片机 中图分类号:T K83 文献标识码:A 文章编号:1006—7981(2012)12—0074—02 风能作为一种清洁的可再生能源,越来越受到世界各国的重视。
其蕴量巨大,全球的风能约为2×107MW,其中可利用的风能为2.74×109MW 。
如何有效、高效的利用风能就是偏航控制系统所要解决的问题。
偏航控制器是偏航控制系统的控制机构,在偏航控制系统的信号下,做相应的动作。
由于风力机所处的工作环境比较特殊,一般情况下都是些恶劣的自然气候如大风,冰雹等,所以对控制器的抗扰动要求就比较严格。
在恶劣环境中不受影响的或能把影响限制在最小范围是偏航控制器最基本要求。
1 偏航控制系统简介偏航系统是水平轴式风力发电机组必不可少的组成系统之一。
偏航系统的主要作用有两个:其一是与风力发电机组的控制系统相互配合,使风力发电机组的风轮始终处于迎风状态,充分利用风能,提高风力发电机组的发电效率;其二是提供必要的锁紧力矩,以保障风力发电机组的安全运行。
偏航系统一般由偏航轴承、偏航驱动装置、偏航制动器、偏航计数器、纽缆保护装置、偏航液压回路等几个部分组成。
偏航控制系统主要具备以下几个功能:风向标控制的自动偏航;风向标控制的90°侧风;自动解缆;人工偏航,按其优先级别由高到低依次为:顶部机舱控制偏航、面板控制偏航、远程控制偏航。
图1 偏航控制系统框图偏航控制系统是一个随动系统,是风力发电机组电控系统的重要组成部分。
偏航控制系统可实现在规定风速范围内自动准确对风,在非可用风速范围内能够90°侧风,在连续跟踪风向可能造成电缆缠绕的情况下自动解缆,从而使风力发电机能够平稳可靠的运转,高效地利用风能,节约了大量能源,进一步降低发电成本并且有效地保护风力发电机。
风力发电机偏航控制系统的设计
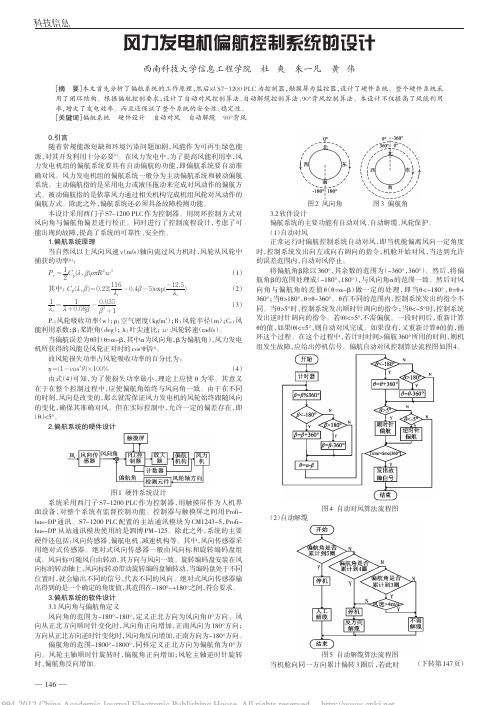
图 6 90°背风的控制算法流程图 当有特大强风发生时,需停机并释放叶尖扰流器或将桨距角调到
参考文献 [1]许凌峰.变桨距风力发电机组智能控制研究[D].北京:华北电 力大学,2008. [2]金长生.风力发电机偏航控制系统的研究[D].大连:大连理工大 学,2010. [3]马小英.MW 级双馈风电机组偏航控制系统的优化及仿真[D]. 兰州:兰州理工大学,2010. [4]张嘉英,王文兰,蔡永刚.风力发电机组偏航控制系统[J].兵工 自动化,2009,28(11):54-55. [5]魏列江,张振华,胡晓敏等.中小型风力机偏航控制系统设计 [J].西华大学学报,2011,30(2):75-77. [6]常杰,孟彦京,朱玉国等.MW 级风力发电机组偏航控制系统的 设计[J].陕西科技大学学报,2009(, 4):76-79.
参考文献 [1]叶澜.教育研究方法论初探.上海人民教育出版社 [2]高等数学研究.高等数学编辑部,2010 年 11 月 [3]张顺燕.数学的思想、方法和应用.北京大学出版社,2011 年 1 月 [4]刘家访.教育学.四川大学出版社,2004 年 7 月
(上接第 146 页) 风速小于风力发电机组启动风速 4m/s 且无功率输 出,则停机,控制系统使机舱反方向旋转 3 圈解绕;若此时机组有功率 输出,则暂不自动解绕;若机舱继续向同一方向偏转累计达 4 圈时,则 控制停机,解绕;若因故障自动解绕未成功,在扭缆达 5 圈时,扭缆机械 开关将动作,此时报告扭缆故障,自动停机,等待人工解缆操作。具体 的自动解缆控制算法流程图如图 5。
— 147 —
的时刻,风向是改变的,那么就需保证风力发电机的风轮始终跟随风向
的变化,确保其准确对风。但在实际控制中,允许一定的偏差存在,即
风电机组偏航电机驱动能力的分析与设计
关键词:风电机组;偏航系统;偏航电机;跳闸;驱动能力
中图分类号:TK83
文献标志码:A
0 引言
风电机组偏航系统主要负责让机舱绕塔架轴
线旋转及停止在指定位置。目前兆瓦级风电机组
的偏航系统主要由偏航电机、减速器、偏航轴承、
相关电气设备和控制系统等组成。偏航电机的驱
动能力对于风电机组是否能够安全可靠地偏航、
典型偏航电机大电流过程进行分析,测量数据如
图 3 所示。图中:塔顶偏航扭矩载荷的正、负表
示扭矩方向不同。
从图 3 可以看出:在偏航一开始的阶段,偏
航电机的转速在 900 rpm 左右轻微波动,4 台偏
2000
Mz/(kN•m)
0
-2000
-4000
-6000
0
10
20
30
40
50
60
้क़/s
a. Mz
供的总驱动扭矩;m 为偏航系统从偏航电机到
偏航轴承的总传动比;η 为偏航系统的总传动效 率;Mz 为塔顶偏航扭矩荷载,该值在风电机组 运行过程中持续波动;Md 为偏航轴承及刹车阻 尼系统的总摩擦阻力矩,其是关于 Mz 的函数。
如果设计时偏航电机的最大驱动扭矩不能超 过最大外部荷载,则风电机组实际运行中会存在 偏航电机无法驱动偏航的可能性。当塔顶的偏航 扭矩荷载增大,偏航电机转速会下降,偏航系统 中所有偏航电机能提供的总驱动扭矩会增大并伴 随电流的增加。当大电流导致的热效应累积到一 定程度时,偏航马达保护开关会断开电路以保护 偏航电机,此时偏航功能丧失,风电机组停止发 电并报出故障,直到保护开关重新合闸。因此, 通过对故障进行分析,摸清偏航电机运行特性与 塔顶偏航扭矩荷载之间的关系,有助于改进偏航 电机驱动能力的评估及进行偏航电机选型,从而
风力发电机组偏航系统自动控制设计
理工学院毕业设计学生姓名:学号:专业:电气工程及其自动化题目:风力发电机组偏航系统自动控制设计指导教师:(教授)评阅教师:2013 年 6 月河北科技大学理工学院毕业设计成绩评定表注:该表一式两份,一份归档,一份装入学生毕业设计说明书(论文)中。
毕业设计中文摘要毕设计外文摘要目录1 绪论 (1)1.1风能的意义 (1)1.2国际风电技术的发展现状和趋势 (1)1.3我国风电技术的发展现状和趋势 (2)1.4风力发电控制技术现状 (4)2 风力发电机组系统构成及功能简介 (5)2.1风电机简介 (5)2.2风力发电的原理 (7)2.3风力发电机系统组成部分简介 (8)3 偏航控制系统功能和原理 (14)3.1偏航系统概述 (14)3.2偏航系统的组成 (14)3.3偏航控制机构 (15)3.4偏航驱动机构 (17)4 偏航控制系统设计及结果分析 (22)4.1偏航系统控制过程分析 (22)4.2 偏航控制系统整体方案设计 (25)4.3 结果分析 (41)5 结论 (42)致谢 (43)参考文献 (44)1 绪论1.1 风能的意义世界经济的快速发展和激烈的竞争,新能源发电尤其是风力发电技术日趋受到世界各国的普遍重视。
除水力发电技术外,风力发电是新能源发电技术中最成熟、最具大规模开发和最有商业化发展前景的发电方式。
由于在改善生态环境、优化能源结构、促进社会经济可持续发展等方面的突出作用,目前世界各国都在大力发展和研究风力发电及其相关技术。
风能取之不尽,用之不竭,是非常重要的一种洁净的可再生能源,是人类能源结构的转变中一个非常重要的部分。
风力发电是人们有效利用风能的方法之一,其技术在可再生能源利用中的运用也是比较成熟的。
风力发电是一项高新技术,它涉及到气象学、空气动力学、结构力学、计算机技术、电子控制技术、材料学、化学、机电工程、电气工程、环境科学、等十几个专业学科,是一项系统技术。
风力发电作为现在新能源利用的重要技术之一,电气工程和它是息息相关,密不可分的。
MW级双馈风力发电机组偏航控制系统研究及优化
MW级双馈风力发电机组偏航控制系统研究及优化摘要:在典型偏航控制系统中,基于单片机语言设计的偏航控制器负责偏航控制系统的中运算和控制,本文介绍双馈风力发电机组中目前国内应用最多的基于PLC控制的偏航控制系统,研究其系统特点及计算原理和控制原理,并针对该系统选用的偏航控制器在实际运用中调整角度困难及过零位检测存在的软件缺陷提出了新的角度调整方法和新的过零位检测控制逻辑。
关键词:风力发电机组;偏航系统;偏航控制系统;优化Abstract:In a typical yaw control system based on single chip computer language design, the yaw controller is responsible for yaw control system operation and control, this paper introduces the doubly-fed wind power generation units in the domestic application of the most based on PLC control yaw control system, studies its system characteristics and calculation principle and control principle, and the system selects the yaw controller in the practical application of angle adjustment difficulties and zero cross detection in the presence of software defect presents new angle adjustment method and a new zero cross detection control logic.Keywords: Double-fed Induction Generator; yaw system; yaw controller system; Optimization0引言在我国,兆瓦级风力发电机组在风能的开发中得到了大规模发展和应用。
兆瓦级风力发电机组偏航系统主动偏航特性分析
2 0 1 4 年
湖
南
大
学
学
报 (自 然 科 学
J o u r n a l o f Hu n a n Un i v e r s i t y ( Na t u r a l S c i e n c e s )
Ab s t r a c t :Th e y a w s y s t e m o f t h e me g a wa t t — c l a s s wi n d t u r b i n e p r o d u c e d s e v e r e v i b r a t i o n i n t h e p r o c e s s
r a d , 振 动衰 减的 时 间超过 了 2 0 S , 通过 在 主 机 架 上加 反 馈 控 制 可快 速 消 除 兆 瓦级 风机 偏 航
系 统 来 回 振 荡现 象.
关键 词 : 风 力发 电机 组 ; 偏航 系统 ; 主 动偏航 ; 固有频 率
中图分 类号 : TK8 3 文献标 识码 : A
J a n .2 0 1 4
文章 编号 : 1 6 7 4 — 2 9 7 4 ( 2 0 1 4 ) 0 1 — 0 0 5 7 — 0 6
兆 瓦级 N - t ;  ̄发 电 机 组 偏 航 系 统 主 动 偏 航 特 性 分 析
鄂 加 强 , 陈 燕 , 李振 强, 钱 承
E J i a — q i a n g 。CHEN Ya n。LI Z h e n — q i a n g,QI AN C h e n g
( Co l l e g e o f Me c h a n i c a l a n d Ve h i c l e E n g i n e e r i n g-Hu n a n Un i v 。C h a n g s h a 。Hu n a n 4 1 0 0 8 2 .Ch i n a )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
兆瓦级风电机组偏航系统的设计自动化 K031241720 李江摘要风能是绿色能源。
我国在风力发电上的投入和研究也正进入一个快速发展的时期。
偏航控制一直未能取得有效的发展。
针对这方面的问题,本论文展开了相应的设计。
在设计过程主控制器选用了德国beckhoff的软PLC,文中对其硬件模块的组态和编程环境TwinCA T 以及现场通讯协议Profibus-DP做了详细介绍和设计说明。
偏航电机的控制选用了西门子G120变频器实现了变频调速,在恶劣环境下减小了偏航系统的振动。
运用TwinCAT编程软件对偏航系统的四个部分:自动偏航、自动解缆、自动润滑、人工偏航的程序进行了编写。
最后,在个人计算机进行了编译、下载和运行,在联机模式下,通过TwinCAT实时可视化的画面对各种状态进行了模拟运行,该偏航系统在各种状态下呈现出很好的控制效果。
关键词风力发电;偏航控制系统;软PLCAbstract Wind energy is a green energy. Wind power will fleetly develop in China,too. the technology for yaw syste m wasn’t still developed for a long time.Therefore,aim at this subject,related research and design will be reported in this thesis.Master controller used the German beckhoff soft PLC in the design process, Paper, the hardware modules to their configuration and programming environment TwinCAT and PROFIBUS-DP communication protocol site a detailed description and design specification. Electric motor control yaw selected Siemens G120 frequency converter frequency control in harsh environments reduces the yaw system vibration. TwinCAT programming software using the four parts of the yaw system: automatic yaw, automatic Cable release ,automatic lubrication, artificial yaw program was written. Finally, in the personal computer to compile, download and run, in online mode, real-time visualization by TwinCAT picture of the various state simulation run, the yaw system in various states shows good control effect.Key words Wind Power Generation; Yaw Control System; soft PLC前言能源是人类生存的基本要素,国民经济发展的主要物质基础。
由于化石资源的日益枯竭和人类对全球环境恶化的倍加关注,风力发电技术也随之得到迅猛发展。
偏航控制机构是风力机特有的伺服系统,用于控制风电机组跟踪变化的风向,并且当电缆发生缠绕时,能够自动解缆的功能,并能够定时润滑偏航机械机构。
1 偏航控制系统硬件设计及选型风力机的偏航系统由偏航检测机构、偏航控制机构和偏航驱动机构三大部分组成,其中偏航检测机构包括:风传感器、机舱位置传感器;偏航控制机构包括:偏航控制器、变频器;机械驱动机构包括:偏航轴承、偏航润滑系统、偏航驱动装置、偏航制动器。
1.1偏航检测机构风向信号作为偏航控制系统中最关键的输入信号,对其准确的测量将影响整个控制系统的性能。
风作为矢量,既有大小,又有方向,其测量包括风向和风速两项。
设计中测风感器采用的Thies Clima公司测风传感器,风向传感器型号:4.3519.00.141。
风速传感器型号:4. 3129.60.141。
由于风力机总是选择最短距离最短时间内偏航对风,由于风向的变化随意性,风力机有可能长时间往一个方向偏航对风,这样就会造成电缆的缠绕,如果缠绕圈过多,超过了规定值,将造成电缆的损坏。
为了防止这种现象的发生,通常安装有机舱位置编码器。
设计中采用了绝对值编码器,选型为HEIDENHAIN公司ROQ425的绝对型多转编码器。
1.2 偏航控机构偏航控制平台拥有四层结构,包括网络层,主站层,从站层和现场层。
网络层通过TCP/IP协议可以实现远程操作、资源共享及网络化;主站层由嵌入式PC、电源模块、现场总线模块以及其他I/O模块等组成,完成对整个系统的控制;从站层是智能化I/O模块,带内置Profibus-DP接口的总线耦合器,完成现场数据采集、数据交换、控制信号输出等功能;现场层由变频器、偏航电机、风向传感器及电磁阀等组成,完成物理量的检测与变送、接收并执行控制量、实现对偏航电机的控制。
偏航控制平台结构图如图1.1所示。
控制器和通讯模块配置数量如表1.1所示。
表1.1 控制器和通讯模块置表这些功能模块可以通过现场总线Profibus-DP与上位机进行通信及数据交换;接收控制量,并将控制量送给控制对象的执行机构;采集现场过程值送入上位机运算,实现实时控制等功能。
图1.1 偏航控制平台结构图为了使偏航系统达到很好的控制效果,为避免在不同的风速下风力发电机组在偏航过程中产生过大的振动而造成整机的共振,设计中选用的变频器,实现了在不同风速下的变频控制,风速与频率对应的关系曲线如图1.2图1.2 风速与频率对应的关系曲线设计中选用了SINAMICS G120变频器,该变频器是一个由多种不同功能单元组成的模块化变频器。
两种主要的单元是:控制单元(CU)、功率模块(PM)。
在设计中选用CU240S DP-F型号的控制单元。
功率模块选用了PM240功率模块具体型号为6SL3224-0BE31-5AA0。
由于在偏航系统中采用Bonfiglioli公司4个100LB电磁抱闸一体化的三相异步电动机,额定电流为5.2A。
在选择变频器时,依据电流相加计算,总电流i=5.2×4=20.8A,考虑 1.2倍的裕量i=20.8×1.2=25A,同时考虑了输出功率的问题,最终选择型号为6SL3224-0BE31-5AA0的功率模块。
同时,根据设计要求以及制动电阻的选型手册,选用了选型为6SE6400-4BD16-5CA0的制动电阻。
1.3 偏航驱动机构设计针对的偏航轴承采用的是回转轴承是一种特殊结构的大型轴承,必须定时给轴承润滑。
针对轴承的润滑,设计了自动润滑系统,其由润滑泵、油脂分配器、润滑小齿轮、润滑管等组成如图,主要用于偏航轴承滚道及齿面的润滑,润滑系统原理图如图1.3所示。
选型:电机选用了单相交流电动机,为力士德YL8014型号的电机,额定功率:0.75kw;额定电压: 220V ;额定电流:4A 额定转速: 1400rpm。
交流220V偏航润滑电机液压泵溢流阀油箱图1.3 自动润滑系统原理图偏航驱动装置包括偏航电机和偏航减速齿轮机构。
偏航电机:为电磁制动三相异步电动机,在三相异步电动机的基础上附加一个直流电磁铁制动器组成,电磁铁的直流励磁电源由安放在电机接线盒内的整流装置供给,制动器具有手动释放装置。
偏航时,电磁刹车通电,刹车释放。
偏航停止时,电磁刹车断电,刹车释放将电机锁死。
附加的电磁刹车手动释放装置,在需要时可将手柄抬起刹车释放。
设计中选用了Bonfiglioli公司100LB电磁抱闸一体化的三相异步电动机。
为了得到对称的驱动扭矩,在设计中用四台电机驱动偏航系统。
通过行星齿轮减速机得到合适的输出转速和扭矩,由于偏航速度很慢,减速器传动比很大,通常在1:1000左右,因此采用多级减速器,在设计中选用Bonfiglioli 700T系列的711T行星齿轮减速机。
为了保证风力机停止偏航时不会因叶片受风载荷而被动偏离风向的情况,风力机上多装有偏航制动器,在设计中采用了电磁抱闸制动和液压制动两套制动系统,以防止停止偏航时机舱被动偏离风向。
液压制动系统的原理图如图1.4所示。
制动器在液压驱动管路上一般装有一个预压阀,以使在松闸状态时,制动液压缸仍保持有很小的压力,使偏航过程中仍有一定的阻力,以保证偏航的稳定性。
图1.4 液压制动系统的原理设计中机组选用用10台制动器,每台制动器由上下两个闸体组成。
刹车闸为液压卡钳形式,在偏航刹车时,电磁K1关闭,先导溢流阀溢流值设定为150bar的压力,此时刹车盘约具有150bar的压力,使刹车片紧压在刹车盘上,提供制动力。
当需要偏航时,电磁阀K1得电打开,先导溢流阀维持在23 bar 左右的一个设定值,产生一定的阻尼力矩,使偏航运动更加平稳,减小机组振动。
液压泵电机为三相异步电机,品牌:恒硕;型号:Y80M2 ;电流:2.5 A ;极数:2 ;额定转速:2830 r/min ;额定功率:1.1KW 。
电磁抱闸制动有两部分组成:闸片部分和电磁部分,原理图如1.5所示,安装在电动机的主轴上,当需要偏航时,电磁部分通电闸片松开,停止偏航时电磁线圈断开,闸片抱住电动机主轴进行制动。
在设计中也选用Bonfiglioli 的抱闸系统,该抱闸系统通过整流模块线圈最终得到24V 的直流电来开启闸片。
同时在闸片上联动了一个常开开关,将电磁抱闸分合状态反馈给控制系统,来确保电机在电磁抱闸打开情况下启动运转,使设备的安全性和可靠性得到大大提高。
开启反馈交流220V图1.5 电磁抱闸制动原理图2 风力机偏航软件设计风力机偏航控制系统工作原理是通过测风传感器检测风向、风速,并将检测到的风向信号送到控制器。
当需要调整方向时,控制器发出信号给偏航驱动机构,以调整机舱的方向,达到对准风向的目的,偏航控制系统框图如图2.1所示。
2.1典型的偏航控制系统框图为了实现这样的伺服控制,通过对整个偏航系统的控制过程进行分析。
偏航系统的控制过程可以分为:自动润滑、自动解缆、人工偏航、自动偏航。
2.1测量值滤波由于大自然中风的随机性,风传感器的测量值随机干扰很大,为了消除干扰,保证系统的可靠性,综合考虑各种滤波的优缺点,设计中选用了一阶滞后滤波法,器程序设计如下(结构文本语言编写)函数体:out := (old_value * (1.0 - ( 1.0 / time_factor))) + ( in / time_factor) ;old_value := out ;根据风向和风速的特性和经验值,在调用该函数块滤波时,风向测量值的滤波平滑系数取300,风速测量值的滤波平滑系数取60。