Harris角点特征提取
基于图像噪声检测的Harris角点提取方法

R ) ( 。Y ) 为 z ,。 的一个邻 域 。 灰 度 I x, 在 ( 。Y ) 沿 着某 一 方 向的灰 度变 ( ) z ,。处 化 可表示 为 :
入 研究 , 出多种 经典 算法 。 提 这些算 法大体 上可分 为两 类: 一类是基 于 图像边 缘信息 的角点 提取 , 通过 图像 分
g a e y s fe e r m ma e n ie a d so c lu a in s e d,t e n w mp o e l o ih i r s n e a e n n ie d t c in r v l u f r d fo i g o s n l w ac l t p e o h e i r v d a g rt m s p e e td b s d o o s e e to
a o g wi o e r d e to e a o .Fu t e ,t e e f c i e e s a d f a i i t ft e a g rt m r r v d a d t r u h c nto ld l n t S b lg a in p r t r h r h r h fe tv n s n e s bl y o h l o i i h a ep o e n h o g o r l e
.
角点是 图像 的一 个重 要 的局部 特 征 , 从基 元 图 在
W ( oY , 一 { , ∈R。 ( z ) + ( x , oR) ( ) , z— o — Y )≤ o
中提取符 号化 图像 的过程 中 , 具有 重要意义 。 角点 提取 在 图像 匹配 、 相机标 定 、 目标 描述与 识别和 三维重建 等 方 面有 着极 其重 要 的应 用 , 已有大 量学 者对 其进 行 深
基于harris角点特征提取的matlab全景拼接程序
基于Harris角点特征提取的MATLAB全景拼接程序马飞龙计算机系媒体所2014210854[摘要] 基于Harris角点特征提取的MATLAB图像拼接程序,根据Harris角点法,提取2张图像的特征点,然后匹配2图像特征点,找到正确位移量,进行图像拼接。
[关键词] Harris角点,图像拼接一、Harris角点1、不同类型的角点在现实世界中,角点对应于物体的拐角,道路的十字路口、丁字路口等。
从图像分析的角度来定义角点可以有以下两种定义:i) 角点可以是两个边缘的角点;ii)角点是邻域内具有两个主方向的特征点;前者往往需要对图像边缘进行编码,这在很大程度上依赖于图像的分割与边缘提取,具有相当大的难度和计算量,且一旦待检测目标局部发生变化,很可能导致操作的失败。
早期主要有Rosenfeld和Freeman等人的方法,后期有CSS等方法。
基于图像灰度的方法通过计算点的曲率及梯度来检测角点,避免了第一类方法存在的缺陷,此类方法主要有Moravec算子、Forstner算子、Harris算子、SUSAN 算子等。
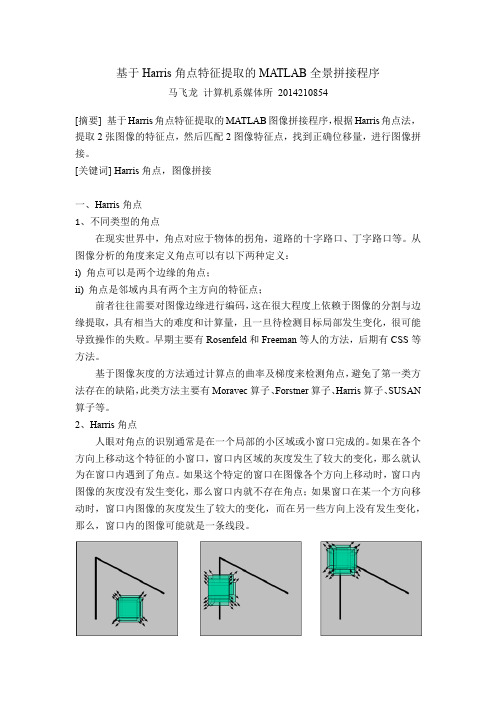
2、Harris角点人眼对角点的识别通常是在一个局部的小区域或小窗口完成的。
如果在各个方向上移动这个特征的小窗口,窗口内区域的灰度发生了较大的变化,那么就认为在窗口内遇到了角点。
如果这个特定的窗口在图像各个方向上移动时,窗口内图像的灰度没有发生变化,那么窗口内就不存在角点;如果窗口在某一个方向移动时,窗口内图像的灰度发生了较大的变化,而在另一些方向上没有发生变化,那么,窗口内的图像可能就是一条线段。
3、算法的实现:将Harris 图像角点检测算法归纳如下,共分以下五步:(1)计算图像I(x,y)在X 和Y 两个方向的梯度I x 和I y ;(2)计算图像两个方向梯度的乘积;(3)使用高斯函数对I x 2、I y 2和I xy 进行高斯加权(取σ=1),生成矩阵M 的元素A 、B 和C ;(4)计算每个像素的Harris 响应值R ,并对小于某一阈值t 的R 置为零;(5)在3×3或5×5的邻域内进行非最大值抑制,局部最大值点即为图像中的角点。
机器视觉处理算法中特征点匹配常用方法

一、介绍在机器视觉处理算法中,特征点匹配是一个重要的环节,它是指在两幅图像中找到相对应的特征点的过程。
特征点匹配的准确度会直接影响到后续的物体识别、目标跟踪、三维重建等任务的效果。
特征点匹配的算法选择和设计是至关重要的。
本文将针对机器视觉处理算法中特征点匹配常用方法进行全面评估,并提供个人观点和理解。
二、常用的特征点匹配方法1. Harris角点检测Harris角点检测是一种常用的特征点提取方法,通过计算图像的灰度变化来检测角点。
通过非极大值抑制和角点响应函数来筛选出最具代表性的角点。
2. SIFT特征匹配SIFT是一种基于局部特征的描述符,它通过在不同尺度空间和不同方向上寻找局部极值来检测图像的关键点,然后使用特征描述符进行匹配。
3. SURF特征匹配SURF是对SIFT算法的改进,它使用了快速Hessian矩阵检测关键点,并使用加速的Haar小波特征描述符进行匹配。
4. ORB特征匹配ORB是一种同时具备SIFT和SURF的优点的算法,它结合了FAST角点检测和BRIEF描述符,具有更快的速度和更好的性能。
5. 其他方法除了上述常用的特征点匹配方法,还有基于深度学习的方法、基于颜色直方图的方法、基于形状上下文的方法等,这些方法根据具体任务和应用场景选择的灵活性更强。
三、个人观点和理解在特征点匹配的方法中,不同的算法适用于不同的场景和要求。
对于实时性要求较高的场景,可以选择ORB特征匹配算法;对于精度要求较高的场景,可以选择SIFT或SURF特征匹配算法。
结合深度学习的方法可以在特定数据集上取得更好的效果。
在实际应用中,需要根据具体情况进行选择和组合使用。
四、总结回顾特征点匹配在机器视觉处理算法中起着至关重要的作用,不同的方法都有各自的优势和局限性。
通过本文的介绍,可以看出特征点匹配算法的发展已经非常成熟,并且在不断地向着更加快速、精确以及适用于更多场景的方向发展。
对于我个人而言,特征点匹配算法的研究不仅是对图像处理技术的挑战,更是对计算机视觉领域的探索。
harris方法
harris方法Harris方法是一种经典的计算机视觉算法,被广泛应用于图像特征提取和图像匹配问题中。
它由Harris和Stephens于1988年提出,主要用于检测图像中的角点。
本文将从原理、特点和应用三个方面介绍Harris方法。
一、原理Harris方法的核心思想是通过计算图像像素的灰度值变化来判断是否存在角点。
角点是图像中灰度值变化显著的点,通常对应着物体的边缘或角落。
Harris方法通过计算图像中每个像素点的Harris响应函数来确定角点的位置。
Harris响应函数的计算公式为:R = det(M) - k(trace(M))^2其中,M是一个2x2的矩阵,表示每个像素点附近的灰度值变化情况。
det(M)表示矩阵M的行列式,trace(M)表示M的迹,k是一个常数。
二、特点Harris方法具有以下特点:1. 不受图像旋转和尺度变化的影响,对于图像的平移和旋转具有很好的鲁棒性;2. 对于噪声和光照变化具有一定的抗干扰能力;3. 可以检测出图像中的角点,并将其与其他特征点进行区分。
三、应用Harris方法在计算机视觉领域具有广泛的应用,主要包括以下几个方面:1. 特征点提取:Harris方法可以用于提取图像中的角点作为特征点,用于图像配准、目标跟踪等任务。
2. 特征匹配:通过计算两幅图像中的特征点之间的距离和相似度,可以实现图像的匹配和对齐。
3. 三维重建:通过对多幅图像进行特征点提取和匹配,可以实现三维场景的重建和建模。
4. 目标检测:通过检测图像中的角点,可以实现目标的检测和识别。
总结:Harris方法是一种经典而有效的图像特征提取算法,具有鲁棒性和抗干扰能力,广泛应用于计算机视觉领域。
它通过计算图像像素的灰度值变化来检测角点,可以用于特征点提取、特征匹配、三维重建和目标检测等任务。
在实际应用中,我们可以根据具体需求选择合适的参数和方法,以提高算法的性能和效果。
以上就是关于Harris方法的介绍,希望对读者对该方法有所了解,并能在实际应用中加以运用。
特征匹配-Harris角点检测
特征匹配-Harris⾓点检测⼀、harris算法简介1.⾓点概述⾓点是图像很重要的特征,对图像图形的理解和分析有很重要的作⽤。
⾓点在保留图像图形重要特征的同时,可以有效地减少信息的数据量,使其信息的含量很⾼,有效地提⾼了计算的速度,有利于图像的可靠匹配,使得实时处理成为可能。
从图像分析的⾓度来定义⾓点可以有以下两种定义:⾓点可以是两个边缘的⾓点;⾓点是邻域内具有两个主⽅向的特征点;前者往往需要对图像边缘进⾏编码,这在很⼤程度上依赖于图像的分割与边缘提取,具有相当⼤的难度和计算量,且⼀旦待检测⽬标局部发⽣变化,很可能导致操作的失败。
基于图像灰度的⽅法通过计算点的曲率及梯度来检测⾓点,避免了第⼀类⽅法存在的缺陷,此类⽅法主要有Moravec算⼦、Forstner算⼦、Harris算⼦、SUSAN算⼦等。
本⽂主要介绍的Harris⾓点检测的算法原理。
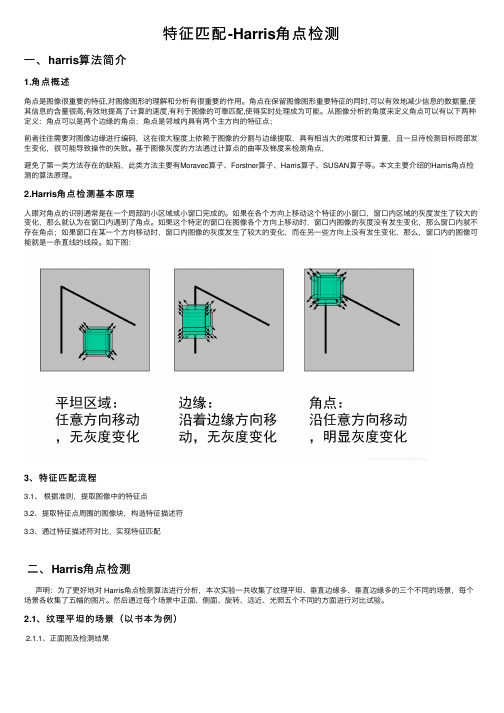
2.Harris⾓点检测基本原理⼈眼对⾓点的识别通常是在⼀个局部的⼩区域或⼩窗⼝完成的。
如果在各个⽅向上移动这个特征的⼩窗⼝,窗⼝内区域的灰度发⽣了较⼤的变化,那么就认为在窗⼝内遇到了⾓点。
如果这个特定的窗⼝在图像各个⽅向上移动时,窗⼝内图像的灰度没有发⽣变化,那么窗⼝内就不存在⾓点;如果窗⼝在某⼀个⽅向移动时,窗⼝内图像的灰度发⽣了较⼤的变化,⽽在另⼀些⽅向上没有发⽣变化,那么,窗⼝内的图像可能就是⼀条直线的线段。
如下图:3、特征匹配流程3.1、根据准则,提取图像中的特征点3.2、提取特征点周围的图像块,构造特征描述符3.3、通过特征描述符对⽐,实现特征匹配⼆、Harris⾓点检测声明:为了更好地对 Harris⾓点检测算法进⾏分析,本次实验⼀共收集了纹理平坦、垂直边缘多、垂直边缘多的三个不同的场景,每个场景各收集了五幅的图⽚。
然后通过每个场景中正⾯、侧⾯、旋转、远近、光照五个不同的⽅⾯进⾏对⽐试验。
2.1、纹理平坦的场景(以书本为例)2.1.1、正⾯图及检测结果2.1.2、侧⾯图及检测结果2.1.3、旋转图及检测结果2.1.4 、远距离图及检测结果2.1.5 、光照图及检测结果实验结果分析与总结:Harris⾓点检测算⼦具有旋转不变性。
角点特征提取

角点特征提取角点特征是图像中最重要的特征之一。
它在计算机视觉和图像处理领域具有广泛的应用。
角点特征能够用来进行图像匹配、目标跟踪、图像分割等任务,具有很高的应用价值。
什么是角点特征?角点特征是指在图像中具有明显的角落或者边缘的点。
这些点通常是图像中灰度值发生明显变化的地方,例如物体边缘、拐角等。
对于角点特征,其周围的像素也会是角点或者接近角点的像素,这使得它们非常适合作为图像匹配的特征点。
角点特征是图像特征中最具有鲁棒性和稳定性的一种。
与其他特征点不同,角点特征不受图像尺度和旋转的影响。
这意味着无论图像发生多少变化,角点特征都能被准确、稳定地检测出来。
这种特性使得角点特征在目标跟踪、图像匹配等领域中得到广泛应用。
角点特征有很多种检测方法,其中比较常用的有如下几种:1. Harris角点检测Harris角点检测是一种常用的角点检测方法。
该方法通过计算图像每个像素点的邻域之间的差异,得到角点响应值,从而实现角点的检测。
该方法简单、高效,并且具有旋转和缩放不变性,稳定性良好。
2. Shi-Tomasi角点检测Shi-Tomasi角点检测是Harris角点检测的一种改进方法,主要是通过改变角点响应值的计算方法来实现更好的角点检测。
该方法计算图像每个像素点的特征值,从中选取最小的一组,以此作为每个像素点的角点响应值。
该方法检测出来的角点数量比Harris角点检测要少,但是能够提取出更准确的角点特征。
3. FAST角点检测FAST角点检测是一种非常快速的角点检测算法。
该算法通过比较像素点与其邻域之间的灰度差异,判断该像素点是否为角点,从而实现角点的检测。
该算法速度非常快,但是对于噪声较大的图像,容易产生误检和漏检。
总结角点特征是图像特征中非常重要的一种。
它具有旋转、缩放不变性,鲁棒性强,可以用于目标跟踪、图像匹配等各种图像处理任务。
通过不同的角点检测算法,可以准确、快速地检测出图像中的角点特征,从而实现更好的图像处理效果。
图像中角点提取与匹配算法
图像中角点提取与匹配算法角点提取与匹配算法是计算机视觉领域中的一项重要技术,用于在图像中寻找具有明显角度变化的特征点,并将这些特征点进行匹配。
这些算法在很多应用中都起到了关键作用,如图像配准、目标跟踪、三维重建等。
角点是图像中具有明显角度变化的点,它们在不同尺度和旋转下具有稳定性,因此可以用来作为图像的特征点。
在角点提取算法中,常用的方法有Harris角点检测算法、Shi-Tomasi角点检测算法、FAST角点检测算法等。
Harris角点检测算法是最早提出的角点检测算法之一,它通过计算图像中每个像素点周围区域的灰度变化来判断该点是否为角点。
具体来说,该算法计算每个像素点的特征值,通过特征值的大小来确定角点。
如果特征值较大,则该点为角点;反之,则该点为平坦区域或边缘。
Shi-Tomasi角点检测算法是对Harris角点检测算法的改进,它使用特征值中较小的一个来表示角点的稳定性,从而提高了检测的准确性和稳定性。
该算法首先计算每个像素点的特征值,然后选择特征值较小的一部分像素点作为角点。
FAST角点检测算法是一种高效的角点检测算法,它通过比较像素点周围的相邻像素点的灰度值来判断该点是否为角点。
该算法通过快速地检测像素点的灰度值变化来提高检测的速度,同时保持了较高的准确性。
在角点匹配算法中,常用的方法有基于特征描述子的匹配算法,如SIFT(尺度不变特征变换)算法、SURF(加速稳健特征)算法、ORB (Oriented FAST and Rotated BRIEF)算法等。
SIFT算法是一种基于尺度不变特征变换的特征描述子算法,它通过检测图像中的关键点,并计算每个关键点周围区域的特征描述子。
这些特征描述子具有尺度不变性和旋转不变性,因此可以用来进行图像匹配。
SURF算法是一种加速稳健特征算法,它通过使用快速哈尔小波变换来计算图像中的特征点,并使用加速积分图像来加速特征点的计算。
这些特征点具有尺度不变性和旋转不变性,可以用来进行图像匹配。
计算机视觉中的角点提取与描述技术
计算机视觉中的角点提取与描述技术角点是指在图像或视觉场景中具有明显变化或特征的位置。
在计算机视觉中,角点提取与描述技术是一种重要的图像处理方法,用于检测和描述图像中的角点。
本文将介绍计算机视觉中的角点提取与描述技术的原理、方法和应用。
一、角点提取技术的原理和方法1. Harris角点检测算法Harris角点检测算法是最早的角点检测算法之一。
它基于图像灰度在不同方向上的变化,通过计算像素点周围的灰度变化来判断是否为角点。
该算法通过计算图像中每个像素的梯度矩阵,再计算矩阵的特征值来判断是否为角点。
2. Shi-Tomasi角点检测算法Shi-Tomasi角点检测算法是对Harris算法的改进。
它使用了特征值的最小值来判断像素是否为角点,相比于Harris算法更稳定且具有更好的鲁棒性。
该算法计算了图像中每个像素的特征点得分,然后选择得分最高的像素作为角点。
3. FAST角点检测算法FAST角点检测算法是一种高效的角点检测算法。
它通过比较周围像素的灰度值来检测角点。
该算法快速地选择候选角点并进行特征点检测,具有较快的速度和较好的鲁棒性。
4. 角点描述算法角点的描述是指将检测到的角点进行特征描述,以便后续的匹配和识别。
常用的角点描述算法包括SIFT(Scale-Invariant Feature Transform)、SURF(Speeded Up Robust Features)和ORB(Oriented FAST and Rotated BRIEF)等。
二、角点提取与描述技术的应用1. 物体识别与跟踪角点提取与描述技术在物体识别与跟踪中发挥了重要作用。
通过提取图像中的角点,并进行描述和匹配,可以实现对物体的识别和跟踪。
例如,在机器人导航中,可以利用角点提取与描述技术来实现对环境中的障碍物进行识别和跟踪。
2. 图像配准与拼接在图像拼接和图像配准中,角点提取与描述技术也是关键的步骤。
通过提取图像中的角点,并进行特征描述和匹配,可以对多幅图像进行配准和拼接。
基于Harris算子的彩色数码影像角点特征提取
度 . 字 图像 中 的特 征 可 分 为 点状 特 征 、 状 特 征 数 线 和面 状特征 . 中点状 特 征也就 是通 常所 说 的角 点 其
是 二维 图像 亮度 变化 剧烈或 图像边缘 曲线 上 曲率极
大值 的点 , 它决 取 点状 特 征 的 算子 称 为兴 趣 算 子 或 有 利 算 子, 目前 已经提 出了很 多兴趣 算子 , 根据他 们的性 质 可分 为三类 .第 一 类 是基 于 形 状 的兴 趣 算 子 : 征 特
Ab t a t s r c :W ih t e de eo me t o lc r n c tc n l g h o — e s e c m e a b c me h i t h v l p n f ee to i e h o o y t e n n m a ur a r e o s t e man
10 4 004
40 7 ) 3 09
摘
要 :随着 电子技术 的发 展, 量测 数码 相 机 以 其镜 头 可 更换 、 作 灵 活 、 便 、 格 低 廉 等优 非 操 方 价
点, 渐成 为数 字近 景摄 影测量 影像 获取 的主 要设 备 .但 近 景摄 影 测 量在 工程 应 用 中仍 存在 精度 逐
第2 4卷 第 4期
20 0 8年 1 2月
北 京 建 筑 工 程 学 院 学 报
J un l fB in iest f vlE gn eiga dArhtcu e o r a o e ig Unv riyo i n ier n c i tr j Ci n e
v0 . 4 NO. 12 4 De .20 c 08
低 、 率低 的缺 陷.现研 究一 种基 于 Har 算 子的 非量测数 码影像 角点提 取方 法, 效 ri s 可提 高 角点提取 的精 度, 而可 为近 景摄 影测 量在工程 中的进 一 步应 用提 高精度 . 从 关键 词 : r s Har 算子 ;角点特 征提 取 ;非量 测相机 i 中图分 类号 : 2 8 P 0 文献 标志码 : A
Harris角点检测
Harris⾓点检测⽬录OpenCV可以检测图像的主要特征,然后提取这些特征、使其成为图像描述符,这类似于⼈的眼睛和⼤脑。
这些图像特征可作为图像搜索的数据库。
此外,⼈们可以利⽤这些关键点将图像拼接起来,组成⼀个更⼤的图像,⽐如将许多图像放在⼀块,然后形成⼀个360度全景图像。
这⾥我们将学习使⽤OpenCV来检测图像特征,并利⽤这些特征进⾏图像匹配和搜索。
我们会选取⼀些图像,并通过单应性,检测这些图像是否在另⼀张图像中。
⼀特征检测算法有许多⽤于特征检测和提取的算法,我们将会对其中⼤部分进⾏介绍。
OpenCV最常使⽤的特征检测和提取算法有:Harris:该算法⽤于检测⾓点;SIFT:该算法⽤于检测斑点;SURF:该算法⽤于检测⾓点;FAST:该算法⽤于检测⾓点;BRIEF:该算法⽤于检测斑点;ORB:该算法代表带⽅向的FAST算法与具有旋转不变性的BRIEF算法;通过以下⽅法进⾏特征匹配:暴⼒(Brute-Force)匹配法;基于FLANN匹配法;可以采⽤单应性进⾏空间验证。
⼆特征定义那么,究竟什么是特征呢?为什么⼀副图像的某个特定区域可以作为⼀个特征,⽽其他区域不能呢?粗略的讲,特征就是有意义的图像区域,该区域具有独特特征和易于识别性。
因此⾓点及⾼密度区域都是很好的特征,⽽⼤量重复的模式或低密度区域(例如图像中的蓝⾊天空)则不是很好的特征。
边缘可以将图像分为两个区域,因此也可以看做好的特征。
斑点是与周围有很⼤差别的像素区域,也是有意义的特征。
⼤多数特征检测算法都会涉及图像的⾓点、边和斑点的识别,也有⼀些涉及脊向的概念,可以认为脊向是细长物体的对称轴,例如识别图像中的⼀条路。
⾓点和边都好理解,那什么是斑点呢?斑点通常是指与周围有着颜⾊和灰度差别的区域。
在实际地图中,往往存在着⼤量这样的斑点,如⼀颗树是⼀个斑点,⼀块草地是⼀个斑点,⼀栋房⼦也可以是⼀个斑点。
由于斑点代表的是⼀个区域,相⽐单纯的⾓点,它的稳定性要好,抗噪声能⼒要强,所以它在图像配准上扮演了很重要的⾓⾊。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % Harris角点提取算法 % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% clear;
%filename = 'Lena.jpg';filename='object0024.view01.png';
X = imread(filename); % 读取图像
% imshow(X);
Info = imfinfo(filename); %获取图像相关信息
if (Info.BitDepth > 8)
f = rgb2gray(X);
end
%《基于特征点的图像配准与拼接技术研究》
%计算图像亮度f(x,y)在点(x,y)处的梯度
-----------------------------------------------% fx = [5 0 -5;8 0 -8;5 0
-5]; % 高斯函数一阶微分,x方向(用于改进的Harris角点提取算法)ori_im = double(f) / 255; %unit8转化为64为双精度double64fx = [-2 -1 0 1
2]; % x方向梯度算子(用于Harris角点提取算法)Ix = filter2(fx, ori_im); % x方向滤波
% fy = [5 8 5;0 0 0;-5 -8 -5]; % 高斯函数一阶微分,y方向(用于改进的Harris 角点提取算法)fy = [-2; -1; 0; 1; 2]; % y方向梯度算子(用于Harris角点提取算法)Iy = filter2(fy, ori_im); % y方向滤波
%构造自相关矩阵
---------------------------------------------------------------Ix2 = Ix .^ 2;
Iy2 = Iy .^ 2;
Ixy = Ix .* Iy;
clear Ix;
clear Iy;
h= fspecial('gaussian', [7 7], 2); % 产生7*7的高斯窗函数,sigma=2
Ix2 = filter2(h,Ix2);
Iy2 = filter2(h,Iy2);
Ixy = filter2(h,Ixy);
%提取特征点
---------------------------------------------------------------height =
size(ori_im, 1);
width = size(ori_im, 2);
result = zeros(height, width); % 纪录角点位置,角点处值为1
R = zeros(height, width);
Rmax = 0; % 图像中最大的R值k = 0.06; %k为常系数,经验取值范围为0.04~0.06
for i = 1 : height
for j = 1 : width
M = [Ix2(i, j) Ixy(i, j); Ixy(i, j) Iy2(i, j)]; % auto correlation matrix
R(i,j) = det(M) - k * (trace(M)) ^ 2; % 计算R
if R(i,j) > Rmax
Rmax = R(i, j);
end;
end;
end;
%T = 0.01 * Rmax;%固定阈值,当R(i, j) > T时,则被判定为候选角点T = 0.1 * Rmax;%固定阈值,当R(i, j) > T时,则被判定为候选角点
%在计算完各点的值后,进行局部非极大值抑制-------------------------------------cnt = 0;
for i = 2 : height-1
for j = 2 : width-1
% 进行非极大抑制,窗口大小3*3 if (R(i, j) > T && R(i, j) > R(i-1, j-1) && R(i, j) > R(i-1, j) && R(i, j) > R(i-1, j+1) && R(i, j) > R(i, j-1) && ... R(i, j) > R(i, j+1) && R(i, j) > R(i+1, j-1) && R(i, j) > R(i+1, j) && R(i, j) > R(i+1, j+1))
result(i, j) = 1;
cnt = cnt+1;
end;
end;
end;
i = 1;
for j = 1 : height
for k = 1 : width
if result(j, k) == 1;
corners1(i, 1) = j;
corners1(i, 2) = k;
i = i + 1;
end;
end;
end;
[posc, posr] = find(result == 1);
figure,imshow(ori_im);
hold on;
plot(posr, posc, 'r+');
实验结果如图所示。