一种改进的角点提取方法
基于改进Hough变换的角点提取
基于改进Hough变换的角点提取
陈洪波;徐晓蓉
【期刊名称】《计算机应用与软件》
【年(卷),期】2008(025)002
【摘要】提出了一种有效的角点提取的方法.在该方法中,角点将被定义为二条(或二条以上)直线的交点,并利用Hough变换来检测直线.若存在二条(或二条以上)直线经过某点,则该点就被认为是角点(角点候选点).对Hough变换中的映射方式作了改进,在传统的映射中采用的是"一对多"或"多对一"的映射方式,而在改进方式中采用的是"多对多"的映射方式.在这种映射方式下,Hough变换的参数空间不会发生峰值扩散的现象,这样会更有利于峰值的检测(直线检测),从而更有利于角点的检测.实验证明,该方法能精确有效地提取出图像中的角点.
【总页数】5页(P57-60,76)
【作者】陈洪波;徐晓蓉
【作者单位】湖南文理学院计算机科学与技术系,湖南,常德,415000;湖南文理学院计算机科学与技术系,湖南,常德,415000
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于改进Harris角点提取算法的网格图像破损检测 [J], 高庆吉;徐萍;杨璐
2.基于MIC的快速角点提取改进算法研究 [J], 刘文辉;王琰
3.基于改进Harris角点提取的摄像机神经网络标定技术 [J], 崔岸;袁智;王丹;张海鹏
4.基于改进Hough变换算法的圆形零件检测 [J], 熊保玉
5.基于改进Hough变换的红外图像直线检测 [J], 喻小龙;肖永生;聂江华;毛聪因版权原因,仅展示原文概要,查看原文内容请购买。
改进的SUSAN角点提取算法

改进的SUSAN角点提取算法
吕海霞;陈红林
【期刊名称】《电光与控制》
【年(卷),期】2008(015)003
【摘要】采用了一种改进的SUSAN角点提取算法.SUSAN角点提取算法主要利用了角点周边的纹理分布特性,即在角点的某个区域内的像素灰度与角点的相似性来完成角点的提取.在此理论基础上,研究了一种新的基于SUSAN理论的改进的SUSAN角点提取算法,该算法利用了角点附近像素灰度的纹理特征来完成角点的提取,即通过控制与核心点相似的点的连通性与数量来确定该点是否为角点.并且针对阚值T固定选取的问题,采用了一种自动选取阈值的新方法.为了进一步验证所提取角点的实用性,利用特征点匹配对其进行了匹配验证.并通过仿真实验对其进行了检验.
【总页数】4页(P45-48)
【作者】吕海霞;陈红林
【作者单位】西北工业大学电子信息学院,西安,710072;西北工业大学电子信息学院,西安,710072
【正文语种】中文
【中图分类】V271.4
【相关文献】
1.一种改进的SUSAN角点提取算法 [J], 张帆;肖阳辉
2.双边几何阈值SUSAN角点提取算法 [J], 钟金荣;顾夏华;林嘉宇
3.一种改进的快速SUSAN棋盘格角点检测算法 [J], 夏海英;刘伟涛;朱勇建
4.利用SUSAN算子提取影像角点的改进方法 [J], 胡东平;周天顺;蒋丹妮
5.一种改进的SUSAN角点检测算法 [J], 郑昊;林玉娥
因版权原因,仅展示原文概要,查看原文内容请购买。
一种改进的SUSAN角点检测算法
一种改进的SUSAN角点检测算法摘要提出了一种改进的SUSAN角点检测算法,在原有的SUSAN算子的基础上,针对原算子需要人为的提供阈值的不便,提出了一种自动阈值的检测方法。
同时,在角点检测完成后,根据角点的形状特点,进一步的对角点进行了判断,提高了角点的识别效果。
关键词角点检测;SUSAN算法;角点形状;自适应阈值0 引言SUSAN算法是1997年英国牛津大学的Smith等人提出的一种处理灰度图像的方法。
探测算子的基本原理是:与每一图像点相关的局部区域具有相同的亮度。
下面介绍SUSAN角点检测准则。
1 SUSAN算子将位于圆形窗口模板中心等待检测的象素点称为核心点。
假设图像中无纹理存在,称与核心点具有一样的灰度值的区域为USAN(Univalue Segment Assimilting Nucleus)。
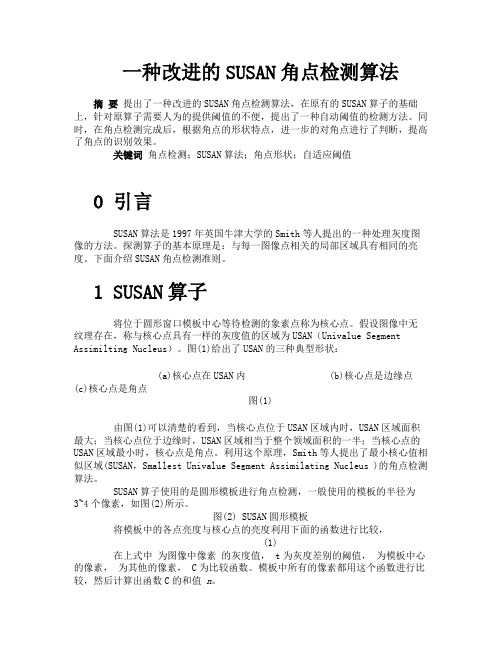
图(1)给出了USAN的三种典型形状:(a)核心点在USAN内 (b)核心点是边缘点(c)核心点是角点图(1)由图(1)可以清楚的看到,当核心点位于USAN区域内时,USAN区域面积最大;当核心点位于边缘时,USAN区域相当于整个领域面积的一半;当核心点的USAN区域最小时,核心点是角点。
利用这个原理,Smith等人提出了最小核心值相似区域(SUSAN,Smallest Univalue Segment Assimilating Nucleus )的角点检测算法。
SUSAN算子使用的是圆形模板进行角点检测,一般使用的模板的半径为3~4个像素,如图(2)所示。
图(2) SUSAN圆形模板将模板中的各点亮度与核心点的亮度利用下面的函数进行比较,(1)在上式中为图像中像素的灰度值, t为灰度差别的阈值,为模板中心的像素,为其他的像素, C为比较函数。
模板中所有的像素都用这个函数进行比较,然后计算出函数C的和值n。
(2)和值n就是USAN(univalue segment assimilating nucleus)区域的像素个数,就是USAN区域的面积,然后把这个面积和几何阈值进行比较,得到最后的响应函数:(3)上式中,R为响应函数,g为阈值,通常在探测角点时取值为1/2模板的像素个数,当采用7×7的模板时,g=37×1/2。
一种改进的多尺度Harris角点检测算法
KEYW ORDS c r e e e t n,mu t- c l ,DOG p r t r D G y a d, i g n a c me t o n rd t c i o li a e s o e ao , O p r mi ma e e h n e n
e t e o n f h e t r o n sn a h o c n r s , v i h r d t n l r y s a e t a s o ma i n t c n l g i g l rt x r me p i to e f a u e p i t e rt el w- o ta t To a o d t et a i o a a - c l r n f r to e h o o y sn u a i t i g y,
响, 但这 种角 点提取 的缺 点是对 噪声 比较 敏感 。 ri Har s
廓 作 为一种 特征 向量 , 实现 边缘 、 点检 测和 不 同分辨 角 率 上 的特征 提取 等 。
尺度 空 间表 示是 一种基 于 区域 而不是 基 于边缘 的 表 达 , 度空 间核被 定 义为 : 尺
/ 一 k* () 1
对 于所 有 的信号 , 它 与变换 核 k卷 积后 得 到 若
的 信 号 中的极 值 ( 阶微 分 过零 点 数 ) 一 不超 过 原 图 像 的极值 , 称 k为尺度 空 间核 , 进 行 的卷积 变换 称 则 所 为 尺度 变换 。
I r v d t n a c h t b l y o r c s e ma e . Ex e i e t lr s ls s o t a h m p o e mp o e o e h n e t e s a i t f p o e s d i g s i p r n a e u t h w h t t e i r v d mu t— c l r i c r e m lis a e Ha rs o n r d t c in me h d h s t e c a a e itc o ma lr e r r e e t t o a h h r t r i f s l r o ,p e d — o n r p i t l s ,e r r r t o r a d t e ma k d y i p o e o s e s u o c r e o n e s r o a e l we n h r e l m r v d
一种改进的Harris角点检测算法
1 算 法改进 思想
通 常情 况 下 , ri角点 检测 需 要 根据 Hars 图像 的特 性 ( 如尺 寸 , 理 、 度 等 )对 其 所 纹 灰 , 涉及到 的阈值( h e od V le、 T rs l au )局部 极大 h 值 的 邻 域 大小 ( i t 、 斯 窗 口 的 大 小 W d h) 高 ( a s dh ¥ 高 斯方 差( ) G u s t )a Wi 四个参数 进行 手动 调 整…。 文 所 研究 处 理 的 对 象具 有 角 本 点分 布 均 匀 , 个数 确 定 的 特 点 , 以提 取 图 所 像 角 点需 要 满 足 以 下 两 个 准 则 :1 每 个 角 () 点的附 近 邻域 内避 免 出现 多个 角 点 ; ) ( 角点 2 数 目和 图 像 的 长 、 宽有 关 , 此得 出 角点 区 据 间 。 角点 不 满 足 上述 准则 时 , 取 分 步方 当 采 法对 相应 的 参数 进 行调 整 。 同时 用二 分 法赋 值的思想对T rs o le h e l Va 和W it 进行调 h d u dh 整 , 到 角 点 数 位 于规 定 的 区 间范 围 内 。 直
中图 分 类号 : 6 G4
文 献标 识码 : A
文章 编 号 : 6 2 3 9 ( 0 o I () O 1 -0 1 7 - 7 12 1 ) 2b - 0 0 1
时 , 入 循 环 ,T rsodV le ri, x 进 heh l au e( nma), a
在 计 算 机 视 觉 研 究 领 域 , 体 的 轮 廓 物 特 征 点的 提 取 有 着 十分 重 要 的 意 义 。目前 , 常 用 的 角 点检 测 方 法 主 要 包 括 : 于 轮 廓 基 曲线 的 角 点检 测 方 法 、 于 灰 度 图 像 的 角 基 点 检 测 方 法 。 文 基 于 第 二 类 方 法 提 出一 本 种改 进 的 自适 应 Ha rs 点检 测 算 法 。 r i角
一种改进的Harris角点检测方法
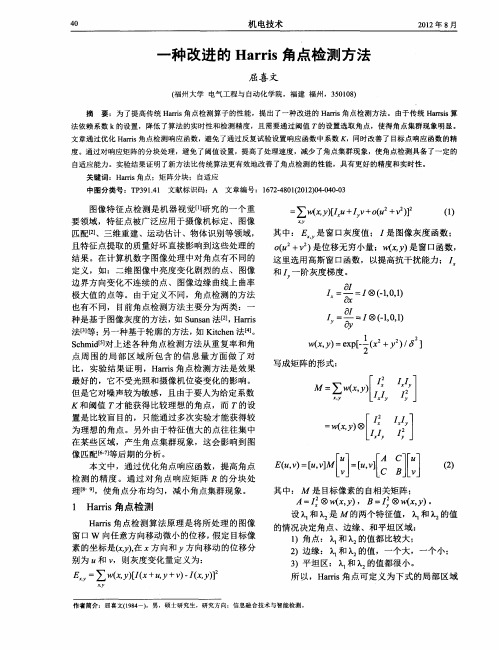
图 2 改进 算 法
检 测准 确率 定义 为 :
=
( 检测 到 的角 点数 目/ 角 点数 目) 10 总 × 0%
( 失 的 角 点 数 目 +错 检 的 角 点 数 丢
xy ,
,
( 1 )
其中:
是 窗 口灰度 值 ; 1是 图像 灰度 函数 ;
ou +1) ( , 是位移无穷小量 ;w xy 是窗 口函数, ( ) ,
这 里选 用高斯 窗 口函数 , 以提高抗 干扰 能力 ; 和 一阶 灰度梯 度 。
O /
:_
0
:
结果。在计算机数字 图像处理中对角点有不同的 定 义 ,如 :二 维 图像 中亮度变 化剧 烈 的点 、 图像 边 界方 向变 化不 连续 的 点、 图像边 缘 曲线上 曲率 极大值的点等。由于定义不同,角点检测的方法 也 有不 同, 目前角 点检测 方法 主要 分为 两类 :一 种 是基 于 图像 灰度 的方 法 ,如 S na 法 【, rs u sn、 Har 】 i 法 [等 ; 3 】 另一 种基 于轮廓 的方 法 , K thn法[。 如 i e c 4 1 S h d 1 上 述各 种 角 点检测 方 法从 重 复率 和 角 c mit对 5 点周 围 的 局 部 区 域所 包 含 的信 息 量 方 面 做 了对 比 ,实验 结 果证 明 ,Har 角 点 检测 方 法 是效 果 rs i 最 好 的 ,它不 受光 照和 摄像机 位 姿变化 的影响 。 但 是它 对噪 声较 为敏感 ,且 由于 要人 为给 定系数 和 阈值 才 能获得 比较 理想 的角 点 ,而 的设 置 是 比较 盲 目的 ,只能 通过 多次 实验才 能 获得 较 为理 想 的角点 。另 外 由于特 征值 大 的点往 往集 中 在 某 些 区域 ,产 生 角点集 群现 象 ,这会 影 响到 图 像 匹配 【7 后期 的分 析 。 6】 _等 本 文 中 ,通 过优 化 角点 响应 函数 ,提 高角 点 检 测 的 精度 。通 过 对 角 点 响应 矩 阵 R的 分 块 处 理[ 9 8] I ,使角 点分 布均 匀 ,减 小角 点集 群现 象 。
一种改进的线搜索式角点检测方法
ali mag a co n r pr r y s i n tf n t i pr os d n hi p er d om bn t e, r e i i dicr ot mian u c i on s op e i t s ap , c an ie wi ada tv n -ma m a s ppr — h p ie on xi l u es
so A in( NMS n e o d ftrt o t lh u e n e sy o e trs i h ma e )a d a s c n i o c nr e n mb ra d d n i ffaue n te i g . l e ot t
K y rsc re ee t nfaue e t cinle s ac ,d pi o — x i ls p rs in ( MS e wod :on rd tci . tr xr t , e rha a t e n n ma ma u pe s o e a o i n v o AN )
3 0 . 4
3 0 5
3 0 6
—
—
—
.
一
..
.
— — — — — — —
J
E/ ( N
5 0
k%) (
图 3 5 % S CO2 体 混 合 物 的漂 移 速 度 0 F 气
3
25 .
r
图 5 S JCO: 合 气 体 的 临 界 击 穿场 强 F 混
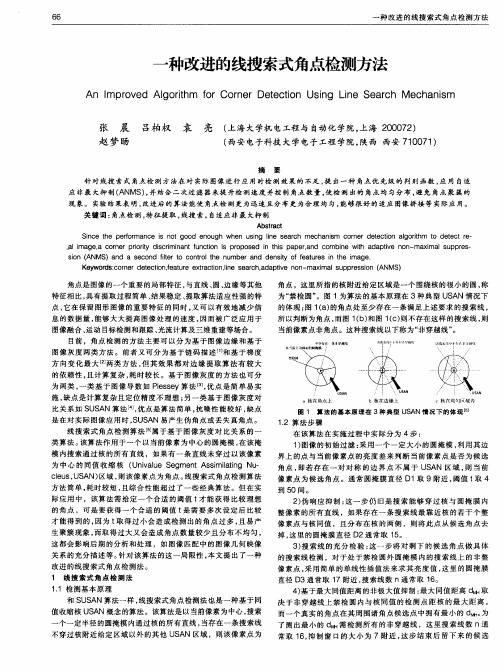
a 核在 角 点上
b梭 仵 边缘 上
c 核 _ 均 匀 城 内 仟
图 1 算 法 的 基 本 原 理在 3种 典 型 US AN情 况 下 的体 现 [ 5
1 算 法 步骤 . 2 在 该 算 法 在实 施 过 程 中实 际 分 为 4步 :
一种新的遥感影像角点提取方法

一种新的遥感影像角点提取方法摘要:遥感影像角点提取是图像处理和计算机视觉中的重要问题之一。
传统的角点提取方法在一些场景下存在一定的局限性,如遇到复杂的背景、低对比度和噪声干扰等。
本文提出了一种基于深度学习的新型遥感影像角点提取方法,通过引入卷积神经网络(CNN)和特征匹配算法,有效地解决了传统方法的局限性,并取得了较好的实验结果。
1. 引言遥感影像角点提取是计算机视觉领域的一个热门研究方向,其在图像匹配、三维重建、目标跟踪等方面具有广泛的应用。
传统的角点提取方法主要基于局部特征检测和描述子匹配,但在一些复杂场景下存在一定的问题。
为了克服这些问题,本文提出了一种新的遥感影像角点提取方法,基于深度学习和特征匹配的思想,通过构建卷积神经网络(CNN)模型来提取角点。
2. 方法2.1 数据预处理对遥感影像进行预处理,包括图像去噪、图像增强和图像分割等步骤。
去噪可以采用传统的滤波算法,如中值滤波和高斯滤波,以去除图像中的噪声。
图像增强可以采用直方图均衡化等方法,以提高图像的对比度和清晰度。
图像分割可以使用分水岭算法或基于区域的方法,以将图像分割为不同的区域。
2.2 卷积神经网络模型本文构建了一个基于卷积神经网络(CNN)的模型来提取遥感影像中的角点。
该模型包括多层卷积层、池化层和全连接层。
通过训练样本集,我们可以得到一个具有较强特征提取能力的CNN模型。
在测试阶段,我们将待提取角点的遥感影像输入到CNN模型中,通过卷积和池化运算,得到角点的位置和特征。
2.3 特征匹配算法为了进一步提高角点提取的准确性和稳定性,本文引入了特征匹配算法。
首先,将提取到的角点特征进行描述子编码,如SIFT或ORB等。
然后,通过计算描述子之间的相似度,采用最近邻或随机抽样一致性(RANSAC)等方法进行特征匹配。
最后,通过筛选匹配点对和求解几何变换模型,得到最终的角点提取结果。
3. 实验与结果为了验证本文提出的方法的有效性,我们在多个遥感影像数据集上进行了实验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
)
Ai
总的 CR F 就是上面 4 个值的最小值: R = m in ( r1 (x ) , r2 (x ) , r3 (x ) , r4 (x ) )
角点是图像的重要特征, 通常定义为在图像边 界上曲率足够高的点. 由于角点对应于图像中信息 含量高的位置, 相对于原图而言, 使用角点进行匹配 计算能够大大减少计算量. 因此它在图像匹配中能 够有很大的应用, 此外, 在光流计算、三维场景重建、 运动估计以及目标跟踪等方面也具有广泛的应用. 大部分角点检测算法都是直接对灰度图像进行操 作. 这些方法可分为基于方向导数的方法[1~ 3] 和直 接基于图像亮度的对比关系, 如 SU SAN 算法[4] 和 基于数学形态学的方法[5]. 后一类方法计算较为简 单, 抗噪声的能力较强.
图 3 在方形窗上的插值示意图 F ig. 3 T he in terpo la tion on the side
of squa re w indow
为了克服上述问题, 本文提出了一个新的算法, 它既能克服上述方法中插值不准的问题, 又能保证 对角方向的反应函数是一个二次函数, 从而可很方 便地求极值. 在本方法中, 图像窗不采用圆窗口而用 了方形窗. 这主要是基于如下的考虑: ①如果将图 1 中的图像窗改为方形窗, 所得结果并不会受到影响;
同理可得: QQ ′方向上
r2 (x ) = A 2x 2 + B 2x + C 2
A 2 = rC - rB - 2B 2
B 2 = (f C - f B ) (f B - f O ) f B ′) (f B ′- f O )
C 2 = rB R R ′方向上
r3 (x ) = A 3x 2 + B 3x + C 3
收稿日期: 1999209229 作者简介: 王建琦 (1974~ ) , 男, 硕士生.
图 1 几种U SAN 的代表形状 F ig. 1 R ep resen ta tive shap es of U SAN
914
上 海 交 通 大 学 学 报
第 34 卷
图 1 (a) 表示某点在一块亮度相同的区域中心;
应函数定义为
r1 (x ) = (f P - f C ) 2 + (f P ′- f C ) 2
r2 (x ) = (f Q - f C ) 2 + (f Q ′- f C ) 2
(5)
式中: P 与 P ′、Q 与Q ′关于点 C 对称. f P , f P′, f Q , f Q ′
的值可近似由线性插值求得 (见图 2 (b) 所示) :
第 7 期
王建琦, 等: 一种改进的角点提取方法
915
②如果将插值改在方形窗的边界上, 可使插值的计 算更加准确. 在图 3 中, P 点在直线 A B 上, 其灰度 值为
f P = (1 - x ) f A + x f B 可见, P 点的灰度值只与A 和 B 有关. 此时在水平、 竖直方向上的灰度变化为
B 4 = (f A ′- f D ) (f D - f O ) +
(11)
(f A - f D ′) (f D ′- f O )
C 3 = rD
当 B i≤0 和 A i+ B i≥0 时, ri (x ) 取得最小值, 此
时 x = - B i A i, 对应的最小值为
Ri=
(C i -
B
2 i
(b) 表示某点在边界上; (c) 代表了角点.
设想任意一条穿过中心的直线, 它与该圆形窗
口有两个交点 P 和 P ′, 如图 2 (a) 所示. 定义如下的
角点反应函数 (Co rner respon se funct ion, CR F ) :
R N = m in ( (f P - f C ) 2 + (f P ′- f C ) 2) (1)
f P = (1 - x ) f A + x f B
f P ′= (1 - x ) f A ′+ x f B ′ (6)
f Q = (1 - x ) f A ′+ x f B
f Q ′= (1 - x ) f A + x f B ′ 将式 (6) 代入式 (5) , 得
r1 (x ) = A 1x 2 + 2B 1x + C
in terp ixel po sition s
若此时 R 小于一个预先设定的阈值, 则此时的 中心点不是角点. 如果 R 大于该阈值, 则利用插值 方法计算在对角方向的灰度变化, 此时的 CR F 为
R=
m in
x ∈ (0, 1)
( r1
(x
)
,
r2
(x
)
)
(4)
式中 x 是一个参数, 它决定点在圆周上的位置. 反
rB = (f B - f C ) 2 + (f B ′- f C ) 2
(2)
则 CR F 可这样计算:
R = m in ( rA , rB )
(3)
图 2 线性插值与圆周插值的示意图 F ig. 2 R ep resen ta tion of the linea r and circu la r
第 34 卷 第 7 期 2000 年 7 月
上海交通大学学报
JOU RNAL O F SHAN GHA I J IAO TON G U N IV ER S IT Y
文章编号: 100622467 (2000) 0720913204
一种改进的角点提取方法
V o l. 34 N o. 7 J u l. 2000
r2 (x ) = A 2x 2 + 2B 2x + C
(7)
式中:
A 1 = rB - rA - 2B 1
A 2 = rB - rA - 2B 2
B 1 = (f B - f A ) (f A - f C) +
(f B ′- f A ′) (f A ′- f C )
B 2 = (f B - f A ′) (f A ′- f C ) +
1 快速算法
T ra jkovic 等[6] 提出了一种快速算法. 该算法借 用了 SU SAN 中U SAN (U n iva lue Segm en t A ssim i2 la ting N ucleu s) 的定义: 对于图像中非纹理区域的 任一点, 在以它为中心的图像窗中存在一块亮度与 其相同的区域, 这块区域就称为 U SAN (见图 1).
(f B ′- f A ) (f A - f C )
C = rA
定义: B = m in (B 1, B 2 ) 和 A = rB - rA - 2B . 如
B < 0且 A + B > 0, 则 CR F 在正方形上有最小值:
R = C - B2 A
(8)
2 改进后的算法
2. 1 计算 CRF 本文的分析主要集中于图像的 3×3 邻域, 但其
A 3 = rD - rC - 2B 3
B 3 = (f D - f C) (f C - f O ) +
(10)
(f D ′- f C′) (f C′- f O )
C 3 = rC S S ′方向上
r4 (x ) = A 4x 2 + B 4x + C 4
A 4 = rA - rD - 2B 4
结论很容易推广到更大的邻域. 当采用线性插值时, 每一点的灰度值实际上同与其相邻的 4 个点的灰度 值有关, 如图 3 所示. 点W 的灰度值为 f W = (1 - x ) (1 - y ) f A + x (1 - y ) f B +
(1 - x ) y f O + x y f C 如果仅用两点来计算该点的灰度值就会带来偏 差, 影响对角点提取的正确性. 但如果用W 点周围 的 4 个点来对W 点的灰度值进行插值计算, 上述的 在对角方向利用二次函数求反应函数的最小值的方 法就不适用了. 文献[ 6 ]中采用圆周插值时, 其实验 结果不好, 插值中出现的偏差可能是一个重要的原 因.
王建琦, 邓雁萍, 李介谷
(上海交通大学 图像处理与模式识别研究所, 上海 200030)
摘 要: 提出了一种改进的角点提取算法, 该算法是基于角点的性质, 即在角点的某个邻域内, 图像 灰度的变化在任意一条通过该点的直线上都很大. 为了便于对最后的灰度变化值求取极值, 同时兼 顾灰度变化值计算的准确性, 采用了在方形窗边界上的线性插值. 在插值的基础上, 可计算出边缘 角, 通过它来对角点候选点作进一步的筛选. 测试表明该方法比改进前取得了更好的效果. 关键词: 图像匹配; 角点检测; 边缘角 中图分类号: TN 911. 73 文献标识码: A
A n Im p rove d A pp roa ch fo r C o rne r D e te c tion
W A N G J ian2qi, D EN G Y an2p ing , L I J ie2g u ( In st. of Im age P rocessing & Pa t tern R ecogn it ion, Shangha i J iao tong U n iv. , Shangha i 200030, Ch ina)
rA = (f A - f O ) 2 + (f A ′rC = (f C - f O ) 2 + (f C′在两条对角线方向上的灰度变化为
f O)2 f O)2
rB = (f B - f O ) 2 + (f B ′- f O ) 2 rD = (f D - f O ) 2 + (f D ′- f O ) 2 在其他方向 (P P ′) 上的灰度变化为 r1 (x ) = (f P - f O ) 2 + (f P ′- f O ) 2 类似上节的推导, 可得