飞思卡尔智能车电磁组信号采集
飞思卡尔电磁组
智能车简介
飞思卡尔智能车大赛分三种赛组:
摄像头组
光电组
电磁组
调试视频
调试视频
电磁组原理概述
车模直立行走比赛是要求仿照两轮自平衡电动车的行进模式,让车模以两
个后轮 驱动进行直立行走。 在电磁组比赛中,利用 车模双后轮驱动的特点,实现两轮自平衡行走。相 对于传统的四轮行走的车 模竞赛模式,车模直立行走在硬件设计、控制软件开发 以及现场调试等方面提出了更高 的要求。
原理篇
原理篇
• 1.路径检测 • 2.直立控制 • 3.算法设计
• 路径检测的整体思路流程:
• 磁场感应 选频 放大 检波 A/D采集(单片机萨法尔定律可求得通电的导线周 围空间上某一定点的磁场强度。
• 再由法拉利定律和楞次定律可得处在该点处磁感线圈的感应 电动势大小
算法设计
• 在车模控制中的直立、速度和方向控制三个环节中,都使用 了比例微分(PD)控制,这三种控制算法的输出量最终通过 叠加通过电机运动来完成。 • (1)车模直立控制:使用车模倾角的PD(比例、微分)控 制;
• (2)车模速度控制:使用PD(比例、微分)控制; • (3)车模方向控制:使用PD(比例、微分)控制。
单 管 共 射 交 流 放 大 电 路
检波电路
• 测量放大后的感应电动势的幅值E可以有多种方法。最简单的 方法就是使用二极管检波电路将交变的电压信号检波形成直 流信号,然后再通过单片机的AD采集获得正比于感应电压幅 值的数值。
A/D输入
单片机
检测部分的系统框图
直立行走的原理
• 车模直立行走比赛是要求仿照两轮自平衡电动车的行进模式, 让车模以两个后轮驱动进行直立行走。
车模控制任务分解图
• 三个分解后的任务各自独立进行控制。由于最终都是对同一 个控制对象(车模的电机)进行控制,所以它们之间存在着 耦合。这三个任务中保持车模平衡是关键。由于车模同时受 到三种控制的影响,从车模平衡控制的角度来看,其它两个 控制就成为它的干扰。因此对车模速度、方向的控制应该尽 量保持平滑,以减少对于平衡控制的干扰
第五届飞思卡尔智能车大赛华中科技大学电磁组技术报告
第五届飞思卡尔杯全国大学生智能汽车竞赛技 术 报 告学校:华中科技大学队伍名称:华中科技大学五队参赛队员:方华启张江汉诸金良带队教师:何顶新罗惠关于技术报告和研究论文使用授权的说明本人完全了解第五届全国大学生“飞思卡尔”杯智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:目录第1章引言 (1)1.1 概述 (1)1.2 全文安排 (2)第2章电路设计 (3)2.1 电路系统框图 (3)2.2 电源部分 (4)2.3 电机驱动部分 (5)2.4 电磁传感器 (6)第3章机械设计 (8)3.1 车体结构和主要参数及其调整 (8)3.2 舵机的固定 (10)3.3 传感器的固定 (11)3.4 编码器的固定 (11)第4章软件设计 (12)4.1 程序整体框架 (12)4.2 前台系统 (13)4.3 后台系统 (13)4.4 软件详细设计 (14)第5章调试 (15)第6章全文总结 (16)6.1 智能车主要技术参数 (16)6.2 不足与改进 (16)6.3 致谢与总结 (17)I参考文献 (18)附录A 源代码 (18)II第1章引言第1章引言教育部为了加强大学生实践、创新能力和团队精神的培养,在已举办全国大学生数学建模、电子设计、机械设计、结构设计等4大竞赛的基础上,委托教育部高等学校自动化专业教学指导分委员会主办每年一度的全国大学生智能汽车竞赛(教高司函[2005]201号文)[1]。
为响应教育部的号召,本校积极组队参加第五届“飞思卡尔”杯全国大学生智能汽车竞赛。
从2009 年12 月开始着手进行准备,历时近8 个月,经过设计理念的不断进步,制作精度的不断提高,经历 2 代智能车硬件平台及相关算法的改进,最终设计出一套完整的智能车开发、调试平台。
(整理)飞思卡尔智能车比赛电磁组路径检测设计方案
精品文档电磁组竞赛车模路径检测设计参考方案(竞赛秘书处2010-1,版本 1.0)一、前言第五届全国大学生智能汽车竞赛新增加了电磁组比赛。
竞赛车模需要能够通过自动识别赛道中心线位置处由通有100mA 交变电流的导线所产生的电磁场进行路径检测。
除此之外在赛道的起跑线处还有永磁铁标志起跑线的位置。
具体要求请参阅《第五届智能汽车竞赛细则》技术文档。
本文给出了一种简便的交变磁场的检测方案,目的是使得部分初次参加比赛的队伍能够尽快有一个设计方案,开始制作和调试自己的车模。
本方案通过微型车模实际运行,证明了它的可行性。
微型车模运行录像参见竞赛网站上视频文件。
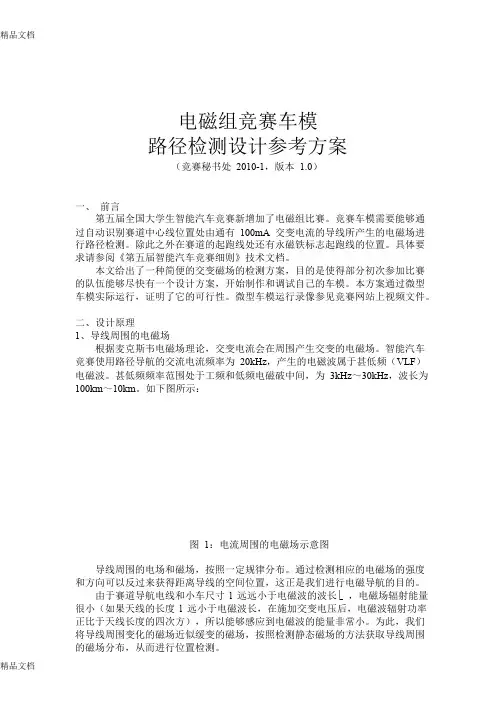
二、设计原理1、导线周围的电磁场根据麦克斯韦电磁场理论,交变电流会在周围产生交变的电磁场。
智能汽车竞赛使用路径导航的交流电流频率为20kHz,产生的电磁波属于甚低频(VLF)电磁波。
甚低频频率范围处于工频和低频电磁破中间,为3kHz~30kHz,波长为100km~10km。
如下图所示:图1:电流周围的电磁场示意图导线周围的电场和磁场,按照一定规律分布。
通过检测相应的电磁场的强度和方向可以反过来获得距离导线的空间位置,这正是我们进行电磁导航的目的。
由于赛道导航电线和小车尺寸l远远小于电磁波的波长 ,电磁场辐射能量很小(如果天线的长度l远小于电磁波长,在施加交变电压后,电磁波辐射功率正比于天线长度的四次方),所以能够感应到电磁波的能量非常小。
为此,我们将导线周围变化的磁场近似缓变的磁场,按照检测静态磁场的方法获取导线周围的磁场分布,从而进行位置检测。
精品文档由毕奥-萨伐尔定律知:通有稳恒电流I长度为L的直导线周围会产生磁场,距离导线距离为r处P点的磁感应强度为:精品文档图 2 直线电流的磁场⎝1 4 r由此得: B = cos⎝4 r对于无限长直电流来说,上式中⎝1 = 0 ,⎝ 2 = ,则有B = (1)。
图3:无限长导线周围的磁场强度在上面示意图中,感应磁场的分布是以导线为轴的一系列的同心圆。
飞思卡尔智能车摄像头组新手指南(5)--让车跑起来篇

飞思卡尔智能车摄像头组新⼿指南(5)--让车跑起来篇舵机、电机控制策略让车跑起来彭岸辉控制器设置了快速的控制周期,在每个运算周期内,控制器即时地得到智能车车速以及传感器采样来的道路信号,经过控制算法的计算后,控制单元输出相应的前轮控制转⾓以及电机占空⽐的值,其输出值再经过函数映射关系转换为 PWM 脉宽信号传⾄前轮舵机以及驱动电机,从⽽实现⼀个周期的控制。
由于摄像头的信号是具有周期性的,可以直接采⽤摄像头采集⼀幅图像的周期作为控制周期。
舵机控制采⽤ PD 控制,控制跟随性较好,P可以及时对赛道的变化作出反应,当然舵机的 P 项值也是跟随赛道情况变化的,直道和较⼩的弯道时控制较弱,90 度弯道或 270 度⼤弯道控制量较强,D有预测道路类型的作⽤,也就是能使舵机提前打⾓。
电机控制采⽤ PID 控制,可以减⼩动态误差并且跟随性能较好。
当然也可以使⽤其他控制,很多⼈舵机采⽤P控制,电机采⽤PD或PI控制。
对⽐他们的优缺点⾃⼰选择适合⾃⼰⼩车的PID。
这⾥不进⾏深⼊讲解。
前⾯的⼯作完成后懂得基本的图像处理算法就差不多可以使⼩车跑起来了!要使⼩车跑起来其实不难的,很多初学者最希望的就是看⾃⼰的车跑起来,因为当初我也是这样的,很理解师弟师妹们此刻的想法!最基本的图像处理算法就是:图像中间往两边搜索⿊线注意:初学者在初学时不知道偏差是怎样计算的。
这⾥就提⼀下:偏差就是计算出的中线即图中赛道中的⿊线与摄像头所看到的中线即图中赛道中的竖直红线(例如采集到的图像是100列的,那么摄像头看到的中线就是50)做差得到的值就是偏差。
它表⽰车当前位置与期望位置的偏离程度。
再看个图吧:⽤两⾏来说明,其他的⼀样。
第⼀⾏左边坐标(0,1)右边坐标(0,99),得出的中线就是(0,50),那么50所在的那⼀列就是摄像头所看到的中线(就是图中竖直的红线)。
这⾥再提⼀下,很多⼈提出中线后发现上位机上或LCD上没显⽰出中线,其实显⽰出中线很简单的:根据RGB,⼀个像素点的像素值为255时显⽰出来的是⽩⾊,像素值为0时显⽰出来的是⿊⾊。
飞思卡尔智能车信息采集
飞思卡尔智能车信息采集摘要本文首先对智能车的硬件进行设计,达到了低重心、大前瞻、高稳定性。
其次对系统的软件部分进行设计,利用阀值对赛道进行判断,从而得到智能车的偏航角。
综合偏航角控制量实现舵机控制,入弯道切内道,大大提高了智能车的弯道运行速度。
用光电编码盘检测智能车的运行速度,再根据赛道信息给定智能车的运行速度,运用一些算法调节驱动电机转速,实现了电机的快速响应。
经过大量测试,最终确定系统结构和各项控制参数。
关键词:单片机;舵机控制;速度控制【中图分类号】u293.2+50 引言智能车有着极为广泛的应用前景。
结合传感器技术和自动驾驶技术可以实现汽车的自适巡航并把车开得开得又快又稳、安全可靠;汽车夜间行驶时,如果装上红外摄像头,就能实现夜晚汽车的安全辅助驾驶;他也可以工作在仓库、码头、工厂或危险、有毒、有害的工作环境里,此外他还能担当起无人值守的巡逻监视、物料的运输、消防灭火等任务。
在普通家庭轿车消费中,智能车的研发也是有价值的,比如雾天能见度差,人工驾驶经常发生碰撞,如果用上这种设备,激光雷达会自动探测前方的障碍物,电脑会控制车辆自动停下来撞车就不会发生了。
提高安全性和系统效率。
这种新型车辆控制方法的核心,就是实现车辆的智能化。
1 智能车机械结构设计机械结构是控制算法和软件程序的执行机构,对机械结构性能的了解和改造有利于对控制算法和软件程序的实现。
因此对车体机械结构的调整是非常必要的。
1.1 车体机械参数调整前轮参数的调整包括前轮主销后倾角,主销内倾角,前轮外倾角,前轮前束。
这几个参数对车体直线行驶的平稳性和转弯的灵活性有很重要的影响[1]。
1.2 舵机的安装舵机转向是整个控制系统中延迟较大的一个环节,在相同的舵机转向条件下,转向连杆在舵机一端的连接点离舵机轴心距离越远,转向轮转向变化越快。
这样安装的优点是:改变了舵机的力臂,使转向更灵敏;舵机安装在正中央,使左右的转向基本一致;重心相对来说靠后,减轻舵机的负载[2]。
飞思卡尔智能车摄像头边线、黑线提取方法分析
飞思卡尔智能车摄像头边线、黑线提取方法分析
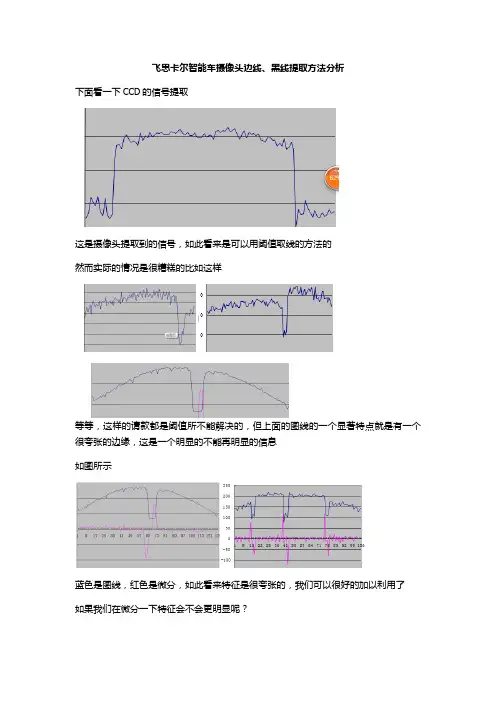
下面看一下CCD的信号提取
这是摄像头提取到的信号,如此看来是可以用阈值取线的方法的
然而实际的情况是很糟糕的比如这样
等等,这样的请款都是阈值所不能解决的,但上面的图线的一个显著特点就是有一个很夸张的边缘,这是一个明显的不能再明显的信息
如图所示
蓝色是图线,红色是微分,如此看来特征是很夸张的,我们可以很好的加以利用了
如果我们在微分一下特征会不会更明显呢?
蓝色是原图想,红色是微分,黄色是微分后再微分,如此看来,再微分已经没有什么明显的效果了,还是一次微分比较的好,
现在理一下思路,
第一步取图像
第二步微分
第三步求绝对值
第四步把一些小的值去掉
对于这样的东西我们就很很很容易处理了
但是我们还要注意这样的情况
即便是去掉了一些很小的信号但是还有一些稍大一点的信号这是值得关注的事情
注意:如果是线性ccd的话灰度值的平均水平有时会很低,为了好看可以采用软件放大的做法,个人认为加运放的效果不好,软件放大还可以加入一些智能的判断和操作,12位的AD转换进度完全够用,图像处理其实八位就完全够用啦。
飞思卡尔智能车电磁组分区算法介绍
飞思卡尔智能车电磁组分区算法介绍写在之前的话:1、⽬前我是⼀名在校学⽣,这也是我第⼀次写博客,不周之处,请多谅解;2、此算法并⾮原创,借鉴⾃⼭东德州学院第⼋届⽩杨队(PS:个⼈看法,对于⼀些⼈把别⼈的开源东西改头换⾯⼀下就说是⾃⼰的原创⾏为⼗分鄙视);3、对于此算法的理解和说明并⾮纸上谈兵,算法已经被我运⽤到了⼩车⽐赛中并取得好的成绩(具体就不多说了,⽐赛时车莫名其妙坏了,⽐赛前调试的速度绝对能进国赛,⽐较遗憾),总之这算法是我尝试过的最好的算法;4、这⼀次所介绍的只是路径算法和⼀些知识普及,后⾯有时间会介绍其余部分算法及许多好的思路(舵机电机控制思路(不只是简单的PID),双车策略);5、希望对于这⽅⾯有涉及的⼈能与我联系并交流或指出不⾜之处。
---------------------------------------------------------------分割线-----------------------------------------------------------------------------⼀、没有这⽅⾯了解的可以看看 飞思卡尔智能车分为三组:摄像头、光电、电磁,我做的是电磁车,三种车队区别在于传感器的不同,所以获得路径信息的⽅法也不⼀样,摄像头和光电识别的是赛道上的⿊线(⽩底赛道),⽽电磁车则是检测埋在赛道下的通⼊100mh电流的漆包线,摄像头和光电采⽤的是摄像头和ccd作为传感器,电磁则是⽤电感放在漆包线周围,则电感上就会产⽣感应电动势,且感应电动势的⼤⼩于通过线圈回路的磁通量成正⽐,⼜因为漆包线周围的磁感应强度不同,因此不同位置的电感的感应电动势就不同,因此就可以去确定电感位置;因此在车⼦前⾯设置了50cm的前瞻,电感布局如下(怎么发不了图⽚):分为两排,前排3个,编号0,1,2(前期还加了两个竖直电感⽤来帮助过直⾓弯,后来改为了⼋字电感);后排2个,编号3,4;现在车⼦获得了不同位置的感应电动势的⼤⼩了,但这些值是不能处理的:1、感应电动势太微弱;2、是模拟信号,信号太微弱就放⼤它;这就涉及到模拟电路的知识了,就不多说了(因为要把这讲完到PCB绘制的篇幅就⾜够写另开⼀号专门写这些⽅⾯来(PS:题外话(我的题外话⽐较多)):放⼤部分外围你设计的再好也抵不过⼀个更好的芯⽚,有两个例⼦,⼀个是我⾃⼰的:之前⽤的是NE5532,但是效果不理想,加了好多什么滤波,补偿,都⽤上,没⽤,软件⾥处理后⾯再说,后来⼀狠⼼换了AD620,感觉像是春天来了,因为它是仪⽤放⼤器,还有就是贵。
智能车无线实时数据采集系统
智能车无线实时数据采集系统飞思卡尔智能车设计大赛是全国170余所高校广泛参与的全国大学生智能汽车竞赛。
飞思卡尔智能车大赛提出制作一个能够自主识别道路的模型汽车,按照规定路线行进,以完成时间最短者为优胜。
在制作和调试智能车关键的过程中,需要动态地跟踪赛车的各种参数并实时地传输给上位机。
最佳的选择是采用无线传输数据给上位机,可见能够制作出无线实时数据采集系统是取得优异比赛成绩的关键。
标签:飞思卡尔智能车;无线通信;上位机飞思卡尔智能车大赛提出制作一个能够自主识别道路的模型汽车,按照规定路线行进,以完成时间最短者为优胜。
在调试智能车关键的过程中,要使用算法对智能车的方向和速度进行控制,选择最佳算法是取胜的关键。
比较和分析各种算法的优劣,需要动态地跟踪赛车的各种参数并实时地传输给上位机。
在不妨碍赛车运行的情况下,最佳的选择是采用无线的方式发送数据给上位机,由上位机进行保存和处理,这方便我们进行实时地观看跟踪。
在2014年飛思卡尔智能车第九届比赛中,有很多赛车冲出赛道而无法取得比赛成绩,分析赛车采集到的赛道信息和智能车控制算法的缺陷是解决赛车冲出赛道的唯一途径。
要分析智能车采集到的大量赛道信息,由于BDM在线调试存在不足和不便之处,高速率数据传输的无线上位机几乎是唯一的选择。
能够制作出高速率数据传输的无线上位机是取得优异比赛成绩的关键。
1 无线上位机的选材采用的通信模块是XL24LD01无线收发模块。
XL24LD01是挪威NORDIC 公司推出的一款高性能 2.4G无线收发IC模块,采用GFSK调制,工作在2400-2483M的国际通用ISM 频段,最高数据速率可达2Mbps。
XL24L01-D01集成了所有与RF协议相关的高速信号处理部分,如:自动重发丢失数据包和自动产生应答信号等,模块的SPI接口可以利用单片机的硬件SPI口连接或用单片机的I/O口进行模拟,内部有FIFO可以与各种高低速微处理器接口,便于使用低成本单片机。
第五届飞思卡尔智能车电磁组程序
第五届飞思卡尔智能车电磁组获奖程序MC9S12XS128单片机、用前置线圈检测磁感线、用无线蓝牙采集数据、干簧管检测起跑线磁铁。
#include <hidef.h> /* common defines and macros */#include "derivative.h" /* derivative-specific definitions */#include <stdio.h>/****************************************************************************** ******一·全局变量声明模块******************************************************************************* ******/typedef unsigned char INT8U;typedef unsigned int INT16U;typedef int INT32;typedef struct {INT8U d; //存放这一次AD转换的值}DATA;/****************************************************全局变量声明区*****************************************************/DA TA data[6]={0}; //全局变量数组,存放赛道AD转换最终结果INT8U a[6][8]={0}; //全局变量用来存放赛道AD转换中间结果INT8U cross0,cross1; //记录十字叉线#define LED PORTA_PA7#define LED_CS PORTA_PA0byte START ;INT16U dianji0;//用来存放上次电机转速PWM,来判断是否减速#define duojmax 9200 //向左转向最大值#define duojmid 8400 //打在中间#define duojmin 7600 //向右转向最小值#define duojcs 8000;#define dianjmax 1200#define dianjmin 10#define dianjmid 600static INT8U look=0,look1=0;int road_change[100]={0}; //判断赛道情况数组int roat_change0;int *r_change0; //指向数组最后一位int *r_change1; //指向数组倒数第二位int sum_front=0,sum_back=0; //分别存储数组前后两部分的和INT16U waittime=0;INT8U choise; //读拨码开关数值/******************************速度测量参数定时********************************/#define PIT0TIME 800 //定时0初值:设定为4MS 测一次速度,采一次AD值#define PIT1TIME 1390 //定时1初值:设定为7ms定时基值/*******************************脉冲记数变量*******************************/ static INT16U PulseCnt;//最终的脉冲数/******************************电机PID变量*********************************/float speed_return_m ;struct {int error0;int error1;int error2;int speed;int chage;float q0,q1,q2,Kp,Kd,Ki;}static SpeedPid;/********************************速度变量设定*******************************/ INT8U speedmax ; //直道加速INT8U speedmin ; //急转弯刹车INT8U speedmid ; //弯道内部限速INT8U speedaveg ; //INT8U breaktime ; //刹车时间////////////////////////////////////////////////////////////////////////////#define speederror_min 2 //允许的最小误差static int NowSpeed;static int speed_control; //存储pid输出值static int speed_return;/*******************************舵机PID参数******************************/struct{int error0;int error1;int error2;int chage;float Kp,Kd,Ki;}PositionPid;int change;static INT16U angle_left [52]={8550,8562,8574,8586,8598,8610,8622,8634,8646,8658,8670,8682,8694,8706,8718,8730,8 742,8754,8766,8778,8790,8802,8814,8826,8838,8850,8862,8874,8886,8898,8910,8922,8934,894 6,8958,8970,8982,8994,9006,9018,9030,9042,9054,9066,9078,9090,9102,9114,9126,9138,9150,9 150};static INT16U angle_right[52]={8250,8238,8226,8214,8202,8190,8178,8166,8154,8142,8130,8118,8106,8094,8 082,8070,8058,8046,8034,8022,8010,7998,7986,7974,7962,7950,7938,7926,7914,7902,7890,787 8,7866,7854,7842,7830,7818,7806,7794,7782,7770,7758,7746,7734,7722,7710,7698,7686,7674,7 662,7650,7650};static INT16U *angle_l=angle_left ,*angle_r=angle_right;static INT16U angle_control=duojmid; //舵机PWM最终控制量static INT16U angle_control0=duojmid;static INT16U angle_control1=duojmid;static INT16U break_pwm=0;INT16U angle_return;/****************************lcd液晶显示变量定义**************************/#define LCD_DATA PORTB#define LCD_RS PORTA_PA4 //PA6#define LCD_RW PORTA_PA5 //PA7#define LCD_E PORTA_PA6 //PA7INT8U start[]={"WELCOME TO LZJTU"};INT8U date[]={"2011-3-15 TUS"};INT8U time[]={"00:00:00"};INT16U Counter=0;INT8U Counter0=0,select=0,min=0;INT8U Counter1=0;INT8U LCD_choice;/**************************标志变量区*************************************/INT8U stop_flag=0;INT8U start_flag=0;INT8U backflag=0;INT8U AD_start ;INT8U zhijwan=0 ;INT8U shizi=0;/****************************************************************************** ******二·初始化函数模块******************************************************************************* ******//**************************************************************1. 芯片初始化--------MCUInit()**************************************************************/void MCUInit(void){//////////////////////////////////////////////////////////////////////////////////////////// ********总线周期计算方法******** //// fBUS=fPLL/2 //// fvoc=2*foscclk*(synr+1)/(refdv+1) //// PLL=2*16M*(219+1)/(69+1)=96Mhz /////////////////////////////////////////////////////////////////////////////////////////////////CLKSEL=0X00;PLLCTL_PLLON=1; //锁相环控制SYNR = 0X40|0X05;REFDV =0X80|0X01;POSTDIV=0X00;while( CRGFLG_LOCK != 1); //等待锁相环时钟稳定,稳定后系统总线频率为24MHz CLKSEL_PLLSEL = 0x01; //选定锁相环时钟PLLCTL=0xf1; //锁相环控制//时钟合成fpllclk=2*foscclk*(synr+1)/(refdv+1)//synr=2;refdv=1;外部时钟foscclk=16mb//fpllclk=48mb 总线时钟24mb// CRGFLG=0x40; //时钟复位控制// CRGINT=0x00 ; //时钟复位中断使能// CLKSEL =0xc0; //时钟选择//COPCTL =0x00;// ARMCOP =0x00; //看门狗复位// RTICTL =0x00; //实时中断}/**************************************************************2. AD转换初始化--------ADCInit()**************************************************************/void ADCInit(void){A TD0CTL1=0x00;A TD0CTL2=0x40; //0100,0000,自动清除使能控制位,忽略外部触发//转换结束允许中断,中断禁止A TD0CTL3=0xA4; //0100,0100,转换序列长度为4;FIFO模式,冻结模式下继续转换A TD0CTL4=0x05; //00001000,8位精度,PRS=5,ATDCLOCK=BusClock(24mb)/(5+1)*2,约为2MHz,采样周期位4倍AD周期A TD0DIEN=0x00; //输入使能禁止}/**************************************************************3. PWM初始化--------PWMInit()**************************************************************/void PWMInit(void) //PWM初始化{//总线频率24mb//1. 选择时钟:PWMPRCLK,PWMSCLA,PWMSCLB,PWMCLKPWME=0x00; //PWM通道关闭PWMPRCLK=0x01; //00010011时钟源A=BusClockA/2=48M/2=24MB;//低位clockA:01,45;高位clockB:23,67 时钟源B=48/1=48MBPWMSCLA =2; //ClockSA=ClockA/2/2=24MB/4=6MBPWMSCLB =2; //ClockSB=ClockB/2/2=12MBHzPWMCLK =0xFF; //通道均级联,均用SA,SB ,且都为6MB//2. 选择极性:PWMPOLPWMPOL =0xff; //电机正反转寄存器(PWMPOL)起始输出为高电平//3. 选择对齐方式:PWMCAEPWMCAE=0x00; //输出左对齐//4.PWMCTL PWM控制寄存器PWMCTL=0xF0; //01,23,45,67通道都级连,输出风别由1,3,5,7口控制//5. 使能PWM通道; PWME//6. 对占空比和周期编程//周期计算公式:输出周期=通道时钟周期*(PWMPERX+1)//占空比:=(PWMPERYX+1)/(PWMPERX+1)//开始时刻应使舵机打直,电机不转//1.通道45用来控制舵机PWMPWMPER45=60000-1; //PWM01=6MB/(60000)=100HzPWME_PWME5 =0; //舵机PWM通道开//2.通道23用来控制电机PWM1,通道01用来作为电机PWM2PWMPER23=1200-1;//电机正转PWM周期初始化。
飞思卡尔智能车比赛电磁组路径检测设计方案
电磁组竞赛车模路径检测设计参考方案(竞赛秘书处2010-1,版本 1.0)一、前言第五届全国大学生智能汽车竞赛新增加了电磁组比赛。
竞赛车模需要能够通过自动识别赛道中心线位置处由通有100mA 交变电流的导线所产生的电磁场进行路径检测。
除此之外在赛道的起跑线处还有永磁铁标志起跑线的位置。
具体要求请参阅《第五届智能汽车竞赛细则》技术文档。
本文给出了一种简便的交变磁场的检测方案,目的是使得部分初次参加比赛的队伍能够尽快有一个设计方案,开始制作和调试自己的车模。
本方案通过微型车模实际运行,证明了它的可行性。
微型车模运行录像参见竞赛网站上视频文件。
二、设计原理1、导线周围的电磁场根据麦克斯韦电磁场理论,交变电流会在周围产生交变的电磁场。
智能汽车竞赛使用路径导航的交流电流频率为20kHz,产生的电磁波属于甚低频(VLF)电磁波。
甚低频频率范围处于工频和低频电磁破中间,为3kHz~30kHz,波长为100km~10km。
如下图所示:图1:电流周围的电磁场示意图导线周围的电场和磁场,按照一定规律分布。
通过检测相应的电磁场的强度和方向可以反过来获得距离导线的空间位置,这正是我们进行电磁导航的目的。
由于赛道导航电线和小车尺寸l远远小于电磁波的波长 ,电磁场辐射能量很小(如果天线的长度l远小于电磁波长,在施加交变电压后,电磁波辐射功率正比于天线长度的四次方),所以能够感应到电磁波的能量非常小。
为此,我们将导线周围变化的磁场近似缓变的磁场,按照检测静态磁场的方法获取导线周围的磁场分布,从而进行位置检测。
由毕奥-萨伐尔定律知:通有稳恒电流I长度为L的直导线周围会产生磁场,距离导线距离为r处P点的磁感应强度为:B = +sin ⎝ d ⎝ (⎧0 = 4 ⋅10 7 TmA 1 ) ( cos ⎝1 2 ) 。
4 r图 2 直线电流的磁场⎝1 4 r 由此得: B = cos ⎝ 4 r对于无限长直电流来说,上式中⎝1 = 0 ,⎝ 2 = ,则有 B = (1)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ㅢпㄖ 㜳䖜㌱㔕 ṾⲺ䘿⭫ 䟽䳼Ӛ ⭫⍷ Ⲻ ⨼1ǃ 㓯 Ⲵ⭥⻱ṩ 哖 世⭥⻱ ⨶䇪ˈӔ ⭥⍱Պ ӗ⭏Ӕ Ⲵ⭥⻱ DŽ 㜭⊭䖖ㄎ䎋 ⭘䐟 㡚ⲴӔ⍱⭥⍱仁⦷Ѫ20kHzˈӗ⭏Ⲵ⭥⻱⌒ Ҿ⭊վ仁˄VLF˅ ⭥⻱⌒DŽ⭊վ仁仁⦷㤳 Ҿ 仁 վ仁⭥⻱⌒ѝ䰤ˈѪ3kHz̚30kHzˈ⌒䮯Ѫ 100km̚10kmDŽ ⽪˖3.1⭥⍱ Ⲵ⭥⻱ ⽪㓯 Ⲵ⭥ ⻱ ˈ ➗а 㿴 DŽ䙊䗷Ự⍻ Ⲵ⭥⻱ Ⲵԕ 䗷 㧧 䐍 㓯Ⲵオ䰤ս㖞DŽǃ⭥⻱ ⲴỰ⍻ ⌅⻱ ⲴỰ⍻ ⌅ ˈ ⭘⢙䍘о⻱ ѻ䰤Ⲵ ⿽⢙⨶ ˈӪԜ Ҷ ⻱ Ր ˈ ˖⻱ Ҽ ㇑ˈ⻱ й ㇑ˈ⭥⻱㓯⻱ Ր DŽ ⿽⻱ Ր ⭡Ҿ⍻䟿 ⨶н ˈ⍻䟿Ⲵ⻱ ㋮ 㤳 наṧⲴDŽն 䘉Ӌ⻱ Ր ҾӔ ⻱ Ⲵ ⧠䎧 а 䳮 DŽӾԧṬ 䘲⭘ 㘳㲁ˈ Ԝ䘹 Ҷ Ⲵ⭥⻱ 㓯 Ⲵ Ṹˈ ⨶ㆰ ǃԧṬ ǃփ〟 ˄ ˅ǃ仁⦷ ǃ⭥䐟 ⧠ㆰ ㅹ⢩⛩DŽ⭡⭥⻱ ⨶ˈ Ⲵ⻱ 㓯ѝӗ⭏⭥ ˈ䰝 Ⲵ 㓯ѝ Պӗ⭏⭥⍱ˈ ↓ 㿴 Ⲵ⻱ ӗ⭏ ↓ 㿴 Ⲵ⭥ DŽ⭡ ⸕ˈ 㓯䎺䘌⻱ 䎺 ˈỰ⍻ Ⲵ⭥ 䎺 ˈ ⭡Ҿ Ⲵ ↓ Ⲵ⭥ ˈ⭥ Ⲵ ⭥ Ⲵ DŽѪҶ っ Ⲵ⭥ ˈ䟷⭘/& 㦑⭥䐟䘋㹼 䟷䳶DŽⲺ ⨼䙊䗷/&䉀 ⭥䐟 Ⲵ DŽㅜйㄐ 㜭䖖㌫㔏 Ṹ䘹ӾLC䉀 ⭥䐟 Ⲵ Ӕ Ⲵ⭥ ˈ⭥ ˈ 㜭䗮 Ⲯ∛Կˈ䴰䘋㹼 ˈ㾱ⴤ 㜭⭡AD䟷䳶ˈ䘈 享 䍏⭥ 儈Ѫ↓⭥ фн㜭䇙 ⵏˈ 㜭䙊䗷ADⴤ 䟷䳶䘋㹼 Ⲵ ⨶DŽ ⭥䐟 3.3 ⽪DŽ⭥䐟䈕⭥䐟䟼Ⲵ⭥䱫䜭 䙊䗷 傼 Ҷˈн Ⲵ⭥䱫 䝽 Պ н Ⲵ ˈն ⭥䱫 䝽н ⨶ н㜭 ⨶ Ⲵ ˈҏՊ ˈ ⧠∋ ǃнっ ㅹ⧠䊑DŽ䙊䗷↔⭥䐟䗷 ˈ ф⭥ 儈Ⲵ ˈ DŽㅜӄ ⭏ 㜭⊭䖖䚰䈧䎋⨶⭫ ⭫ ㊱ Ⲻ䘿Ҿ䉀 ⭥䐟ˈ⭥ ⭥ Ⲵ䘹 䴰┑䏣 f0=ଵଶξେ=20kHZDŽ Ԝ䘹 Ҷ10mhⲴ⭥ 6.8nfⲴ⭥ DŽ ⭥ ⭥ Ⲵ 䝽кˈ 㾱┑䏣䘹 ˈ н DŽն ⭥ ⭥ ㊫ Ⲵ䘹 Պ Ⲵっ ˈ Ⲵ ӗ⭏ Ⲵ DŽ10mhⲴ⭥ 䶒к ㊫ ˈѫ㾱 㔅㓯Ⲵ㋇㓶ˈ㋇Ⲵ㔅㓯 ԕ ˈ っ Ⲵ ˈ㘼㓶Ⲵ㔅㓯⭥ փ〟 ˈ䟽䟿䖫ˈфӗ⭏Ⲵ ҏ っ DŽ ԕӾ 䶒㘳㲁ˈ Ԝ䘹 Ҷ㓶㔅㓯Ⲵ⭥ DŽ⭥ Ⲵ㊫ Ҷ䉀 ⭥䐟䘹仁㜭 Ⲵ儈վDŽ Ԝ䘹⭘⬧⡷⭥ ˈ Ⲵ Պ䲿 ⭼ Ԧ㘼 ⭏ ˈф Ⲵє ⭥䐟 〠 վˈ ѻ䰤 Ⲵ DŽ ⭘Ӂ⇽⭥ ˈ Ҷ䘉ṧⲴ⧠⣦ˈ っ ф⭥䐟ѻ䰤Ⲵ 〠 儈DŽ⭡↔ˈ Ԝ ⲭˈн Ⲵ⭥ Պ ⭥䐟䙐 Ⲵ DŽㅢ ㄖ 䎑䖜 Ủ㔉 䈹㾱 䇱䎋䖖Ⲵっ Ⲵ㹼傦ˈ㘼фⴤ䚃 䙏䱫 䖳 ˈ䖜 ∄䖳⚥ ˈ䲔Ҷ Ⲵ䖟Ԧ ⺜Ԧ⭥䐟Ⲵ䇮䇑ѻ ˈ䎋䖖Ⲵ Ỡ㔃 ҏ 䟽㾱Ⲵ DŽ ㄐ ӻ㓽䎋䖖Ⲵ Ỡ㔃 ⢩⛩ 䈳 ṸDŽӺ 䖖 䟷⭘վ䟽 ㍗ 䇮䇑ˈ䱽վ㡥 䈳 㟲䮯 ԕ 儈 䙏 DŽ㘼ф⭡Ҿ傡 ⭥䐟Ⲵ 䘋ˈ⭥ 儈Ⲵ ✝䍏㦧ҏ 㪇 Ҷˈ 儈Ҷ䎋䖖 㔝䈳䈅 ∄䎋Ⲵ㜭 DŽ 䱽վ 䖖䟽 䶒䟷⭘Ҷվսѫ Ⲵ ˈ 䟿 䖫 䟷䳶⭥䐟 Ⲵ䟽䟿DŽ䎋䖖 փ 4.1 ⽪DŽ4.1䎋䖖 փ䎋䖖 㺘4.1 ⽪DŽѠゴ 㛑䔺⹀ӊ 䆒䅵ϟ Ў㒘 Ӯ 㤤 Ḝ⬉䏃 ˖Ẕ⊶⬉䏃⬅Ѣ 偠⦃ ϡ ˈЎњ䗖 Ӏ 㕂Ӵ ⱘⱘ催 ˈ㒣䖛ϡ 偠䇗 ˈ䞡 䗝 њ䚼 ˈԚ ϝ ㅵ ⬉䏃ⱘ ӏ✊ Ͼ䲒ҹ㾷 ⱘ䯂乬ˈϔ㑻 ⱘ 䕗 ˈ䕧 ⬉ 㛑䖒ϡ ⠛ Ẕ⌟ⱘ㽕∖ˈϸ㑻 Ӯ ⳳⱘ⦄䈵ˈ㒣䖛ϔ↉ 䯈ⱘ⌟䆩 Ӏ䖬 䗝 њϔ㑻 ˈ 㒜⬉䏃 ϟ ⼎DŽѨ ⫳ 㛑≑䔺ゲ䌯Ӵ ⬉䏃⬅ѢⳌ ӊⱘ 㛑 㛑Ӯ Ў⫳ѻ 㡎 ⱘϡ 㗠 ϡ ˈЎњ㾷 ⌟䆩 䙓 Ӵ ⬉䏃 ϡ 䜡 ⱘϡ ˈ Ӏ䞛⫼њ ϔ ⱘӴ PCBˈ Ў1.2cm*1.5cmDŽ ㅵ Ўњ 䗝 ˈ Ͼ⬉ ӊ䛑 䆹㒣䖛Ҩ㒚ⱘ 䗝ˈ 㛑 䆕 ӊ 䑿䖒 ϔ㟈 ⱘ㽕∖ˈ㗠 Ӏ Ў 䯈 ≵ 䗝ˈ䖭ḋ њ䆌 Ӵ ✊ Ё 䗝ϔѯ 㛑䕗 ⱘDŽϟ 2.4Ў ӀⱘӴ ˖2.4Ӵ 2.2.3Ẕ⌟ Ḝⱘ䗝Ӏ䞛⫼ ∈ 㒓 Ẕ⌟ ḜˈϸϾ㒓 ∈ Ⳍ䎱/ ⳈѢѸ⌕⬉⑤㒓ˈ䎱⾏䎥䘧催 Kˈϸ㒓 ⿄ 䔺 ϞDŽ⬅Ѣ㒓 ⱘ䕈㒓 ∈ ⱘˈ ҹ ⬉ њ⺕ ⱘ∈ 䞣DŽ䅵ㅫϸϾ㒓 ⬉ ⱘ ˖䰙Ẕ⌟ ˈ㢹 䖍Ӵ Ѣ 䖍 䇈 Ѹ⌕⬉⑤㒓ԡѢ 䔺 ջˈѠゴ 㛑䔺⹀ӊ 䆒䅵П ջˈ Ӏ ⌟䆩 ⦄䆹 ӊϟ 㕂ⱘⱘӴ ⳈѢ䎥䘧ˈ㗠 䰙 䎥䘧Ϟ 䘧 Ӵ 䕈㒓 ϡ ⳈѢ䎥䘧ˈẔ⌟ ϔ 䇃 ˈ㟈䕀 ϡ䎇ˈ㒣 䌯䘧DŽ 䡈Ѣℸˈ Ӏ 䆩 Ҫⱘ 㕂 ⊩ˈ ⦄ⱘӴ ϔ ⱘ ⶏˈ㒣䖛ϔ↉ 䯈ⱘ⌟䆩 㒜⹂ ϟњϟ⼎ Ḝ˖Ӵ䆹 ḜЁˈ 㸠Ѣ 䔺㒉䕈㒓ⱘӴ ϔ ⱘ ⶏ ˈ䗮䖛 䞣ⱘ偠 ⦄ˈ ϔ 㣗 ˈ䆹 ⱘӴ Ā ā ЎϞ ⶏӮˈ FP Ѹ ˈԚℷ ℸӴ ⱘ ⶏ ⊩䖒 FPⱘˈ Ў䖭ḋ ⱘӴ Ϣ 䖥 Ѹ ⱘ ⱘ 䍟 Ⳍⱘˈ Ӏ䯳 њ䆌 ӏ✊≵ ⱘ 䖭ϸ ⱘ ˈ㗠 ϔⱘ↨䕗 ⱘ⡍ 䆹 Ѹ Ӵ ⱘ 䗳 䕗 DŽ2.3⌟䗳2.3.1⌟䗳ⱘϔ㠀 ϟˈ⌟䗳ⱘ ˈ 㓪ⷕ ǃ ⬉ ǃ ⬉ ǃㅢпㄖ 㜳䖜⺢Ԭ Ⲻ3.1 ⺢Ԭ⭫䐥 䇴䇗3.1.1⁗⺜ԦⲴ⭥䐟䇮䇑 㜭⁑ 䘋㹼 н Ⲵ кˈ ⭥ 傡 ǃ ㌫㔏 ǃՐ ⭥䐟ǃ⭥Ⓚ㇑⨶⭥䐟ㅹˈ䘉ṧнն ԕ 㻵 䈳䈅ˈ ⤜ ԕ ⭥䐟Ⲵ㓴 ˈӾ㘼䘹 ṸDŽ3.1.2⭥䐟 Ⲵ䇮䇑䟷⭘ Ⲵ ˈ ԕ 㜭Ⲵ㢲㓖オ䰤ˈ њ⭥䐟䟷⭘ Ⲵ 䘎 ˈ䘉ṧ ỠкҏՊ∄䖳 ˈ ԕ䟽 〫ˈ 䖖Ⲵっ ˈ⏢ Ⲵ ⽪ 䈳䈅Ր Ⲵ ㅹ ˈ 㓯 䖖 䖖 㜭 䖖 䈳䈅 㜭 ˈ㢲ⴱ 䰤DŽ3.1.3䘸Ⲵ⭥䐟 ԕ Ḁ ⭥䐟 ⧠䰞仈 䙏㔤 ԓˈ䘉⛩ ∄䎋⧠ 䟽㾱ⲴˈՐ Ⲵ Ⲵ 䈳㤳 䖳 ˈ䘉ṧ 䎋䚃 㡚⻱ н 䜭㜭 ↓ Ự⍻䎋䚃DŽ3.2 㜳⁗ ⭫䐥䇴䇗3.2.1ѣ ⭫䐥⁗ѝ ⭥䐟 њ㌫㔏ⲴṨ ˈ䖖⁑ ⭥䐟䟷⭘伎 փ ⲴMCU Ѫ аⲴ DŽ Ԝ䎵㓗 ⭥⻱㓴䟷⭘Ⲵ 16սⲴ9S12XS128 ⡷ DŽѝ ⭥䐟㜭 ⧠ ⭥ 䖜䙏ǃ㡥 ǃ䙏 䟷䳶ǃ䐟 䇶 ㅹ 㜭DŽ ㌫㔏 ѝˈ 㝊䙊䗷 䪸 ˈ кⴤ ˈ䘉ṧⲴ䇮䇑 Ҿ ⡷ ˈ䚯 䈳䈅AD䟷䳶ǃ⭥Ⓚ⁑ ⡷ ✗⇱DŽ ㌫㔏 к ҶMCU↓ Ⲵ⭥䐟 䫏⭥䐟ǃ ս⭥䐟ǃ⭥Ⓚ12ㅜйㄐ 㜭䖖⺜Ԧ Ⲵ ⽪⚟ǃ䬱⧟└⌒⭥䐟 BDM䈳䈅 ㅹˈ ⧠Ҷ њ⺜Ԧ⭥䐟⁑ Ⲵ DŽ9S12XS128Ⲵ⡷к䍴Ⓚ Ѡ ˈ AǃBǃEǃHǃKǃJǃMǃPǃSǃTㅹ I/O ˈ䘈 єњA/D䗃 ㄟ DŽ ㄟ 䝽кˈ Ԝ ⭘3( ㄟ AD0-AD7ㄟ 䟷䳶䎋䚃Ự⍻Ր ˈ ѝPE0⭘ ӗ⭏ѝ ˈỰ⍻䎋䚃䎧→㓯ˈA/Dㄟ ⭘ 䟷䳶㓯 Ր Ⲵ ˗PBㄟ ⭘ ӗ⭏5110⏢ ˗PT ㄟ 䙏 Ự⍻Ր Ⲵ䇑 㜭˗PK PPㄟ ⭥ 䖜䙏ǃ 㡥 傡 ˗PMㄟ ⧠ 㓯Ր䗃⁑ ˗PAㄟ Ѫ ⸱ 䟿Ⲵ䗃 DŽ3.2.2䐥 䇼 ⁗⭥⻱㓴䖖⁑䴰㾱㜭 䙊䗷㠚 䇶 䎋䚃ѝ 㓯ս㖞 ⭡䙊 100mA Ӕ ⭥⍱Ⲵ 㓯 ӗ⭏Ⲵ⭥⻱ 䘋㹼䐟 Ự⍻DŽ䲔↔ѻ 䎋䚃Ⲵ䎧䐁㓯 䘈 ≨⻱䫱ḷ 䎧䐁㓯Ⲵս㖞DŽ㔬 㘳㲁Ự⍻⻱ Ⲵ㋮ ǃỰ⍻⻱ ⲴՐ Ⲵ仁⦷ ǃ ǃԧṬǃ 㙇ԕ ⧠Ⲵ䳮 〻 ˈ Ԝ䘹 ⭥⻱ 㓯 䘋㹼䐟 ⲴỰ⍻ˈ ⨶ㆰ ǃԧṬ ǃփ〟 ˄ ˅ǃ仁⦷ ǃ⭥䐟 ⧠ㆰ ㅹ⢩⛩˗ ㉗㇑Ự⍻䎧→㓯нӵ ǃ⚥ 儈㘼фっ 䖳 DŽ ⭘⭥ 㓯 ԕ ⲴӔ ⻱ ⭥ DŽ䈕 ⭥ ˈ ⭥ њ∛Կˈ ⭡Ҿ オ䰤 н ǃ仁⦷Ⲵ⻱ ˈ 䖳 DŽ ԕˈ䪸 ∄䎋䘹 Ⲵ .+]ⲴӔ ⻱ Ѫ䐟 㡚 ˈ Ԝ䟷⭘/&䘹仁㖁㔌 䘋㹼䘹仁 ˈ䘉ṧ 䲔Ҷ Ԇ Ⲵ ˈ Ⲵ 䘋㹼Ҷ DŽ13ㅜӄ ⭏ 㜭⊭䖖䚰䈧䎋14 ⽪ˈL 㓯 ˈC Ѫ 㚄䉀 ⭥ DŽṩLC f S 21㓯 ⭥ L=0.63mH ˈ䉀 ⭥ C=0.1uF ˈ ԕ䇑㇇ ⭥䐟Ⲵ䉀 仁⦷ѪKHz LC f 2021|S䘉䙊䗷䘹仁 Ⲵ Պ 㜭Ⲵ ⭼⻱ 䐟 㡚 Ⲵ ˈˈ 䉀 ⭥ ѻ ˈ 㓯 єㄟ䗃 20KHz ⭥ нӵ Ҷˈ㘼ф ҏ䶎 ˈ⭥䐟ѝ䲔Ҷ ⌒ ѻ Ⲵ儈⅑䉀⌒ 㻛└⌒䲔 ˈ ⌒20kHz 㜭 ⭏䉀 ˈ䗃 20KHz ↓ ⌒DŽӵ 䘹仁ˈ 䘈н ˈ䘈䴰㾱 䘋㹼 ˈ⭡Ҿ䎋䚃ѝ 唁㢢㓯л䬪䇮 ⴤ 0.1-0.3mm ┶ 㓯ˈ ѝ䙊 20KHz ˈ100 mA ⲴӔ ⭥⍱DŽ仁⦷㤳 20K±2K ˈ⭥⍱㤳 (50-150mA)ˈ⭥⍱㤳 䗷 ˈѪҶ䘲 н Ⲵ ˈ䴰㾱䟷⭘ 䖳儈ф 䈳Ⲵ 䘋㹼 Ⲵ ˈй ㇑є㓗 ⭥䐟Ⲵ䶉 ⛩䖳䳮䈳ˈ ԕ䟷⭘ 䖳儈Ⲵ ⭥Ⓚ䘀㇇ 䘋㹼 ˈ ѝ䍏⭥Ⓚ⭡LTC660㣟⡷ DŽѪҶՐ Ⲵ䘲 ˈ 䇮䇑ѝˈ ⭘Ҷє㓗 ˈ 䖖 ⲴՐ 䟷⭘ ˈ Ⲵ 䗃 㓗 ѝˈ䙊䗷䈳㢲 㓗⭥䐟Ⲵ ⧠ Ⲵ 䈳ˈ ⭥䐟Ⲵ䘲 DŽ 㓗Ր ⭥䐟Ⲵ ⨶ ˖ㅜйㄐ 㜭䖖⺜Ԧ Ⲵ㓗 ⭥䐟 ⨶ ˖ѝ䘀㇇ 1( 䗮 0+]ˈ㜭 ┑䏣 ⭥䐟Ⲵ㾱≲ˈ ⭡Ҿ ⭥Ⓚ ⭥ˈ⭥ Ⲵ䗃 㤳 ҏ㜭┑䏣 ⡷ $'䟷䳶Ⲵ㾱≲ˈ㔬кˈ1( 䘀 Ⲵ 㜭 ┑䏣 Ԝ⭥䐟Ⲵ䴰㾱ˈ䇮䇑ⲴՐ Ⲵ⭥䐟 ┑䏣 䎋Ⲵ⭥⍱㤳 DŽ唁㢢䇑 䎧 㓯ѝ䰤 㻵 ≨ѵ⻱䫱ˈ⇿а䗩 й DŽ⻱䫱ⴤ 7.5-15mmˈ儈 1-3mmˈ㺘䶒⻱ 3000-5000GsDŽ Ҿ䎧 㓯ⲴỰ⍻ 䙊䗷 ㉗㇑䀖 ѝ ⧠ 䖖Ⲵˈ 6䐟 ㉗㇑ 㚄 䇶 䎧 㓯㜭 ⺞DŽ15Ѩ ⫳Ā亲 ā 㛑≑䔺ゲ䌯OUT2OUT1VCC0.1uF VCCC Cap 0.1uF OUTC2Cap 0.1uF OUTC1Cap GND10K R1Res210K R2Res210KR4Res2 3.3.1⬉⑤ ⧚3.4Ӵ Ӵ 䆒䅵 ㋏ Ͼ乍Ⳃⱘ 䋹DŽ⬉⺕㒘ⱘ 㒓Ў䗮 20KHZ ǃ100mA ⬉⌕ⱘⓚ 㒓˄㒓 0 1mm a 0 3mm ˅ˈ ℸ 㒓 䕤 ⬉⺕⊶DŽ ԩ ⬉⺕⊶㛑䞣䕀 Ў⬉ կAD 䞛ḋ њ 䔺Ё Ў 䬂ⱘ䚼 DŽҹϟ䆺㒚ҟ㒡њ Ӏ 䔺Ӵ Ḝ䗝 ǃӴ 䆒䅵ǃ⹀ӊ ǃӴ Ӭ ⱘ Ͼ䖛DŽϔǃ Ḝ䗝ӀЏ㽕⍝ ⬉⺕Ẕ⌟ⱘ ⊩Џ㽕 ҹϟϝ⾡˖1ǃ⬉⺕ ⺕ ⌟䞣 ⊩˖⬉⺕㒓⺕ Ӵ ˈ⺕䰏 ⺕ Ӵ DŽ2ǃ䳡 ⺕ ⌟䞣 ⊩˖ ԧ䳡 Ӵ ǃ⺕ Ѡ ㅵˈ⺕ ϝ ㅵDŽ3ǃ ⬉䰏 ˄AMR ˅⺕ ⌟䞣 ⊩DŽϞ䗄ϝ⾡Ẕ⌟ ⊩ Ӏ䛑䖯㸠䖛 偠ˈ 㒜䗝 Ḝ1ˈ Ў Ḝ1 ⦄ ˈ䳔∖ⱘ ӊ ⫼ˈẔ⌟♉ 催DŽ Ḝ2䗝 䳡 Ӵ ˈЏ㽕 Ў♉ Ԣǃ ӊϡ 䗝 ㄝ ˈ㗠 Ѣ Ḝ3ˈ Ӏ䗝⫼䳡 䶺 ⱘ2㓈ϝゴ 㛑䔺⹀ӊ㋏㒳⺕䰏Ӵ HMC1022ˈԚ HMC1022 ˈ䳔㽕Ҿ㸼 㕂ԡ ԡ⬉䏃ˈ㗠Ϩ ӊӋḐϡ㧆DŽѠǃ Ḝ1⬉⺕Ẕ⌟ ⧚> @ḍ ⬉⺕ⶹ䆚ˈ 䗮 Ѹ ⬉⌕ⱘⳈ 㒓 ⬉⺕ DŽ 㛑䔺ゲ䌯Ё䏃 㟾Փ⫼ⱘѸ ⬉⌕Ў20KHZˈ100mA⬉䏃ˈѻ⫳ⱘ⬉⺕⊶ Ѣ⫮Ԣ乥˄VLF˅⬉⺕⊶DŽ⫮Ԣ乥乥⥛㣗 Ѣ 乥 Ԣ乥⬉⺕⸈Ё䯈ˈЎ3kHz̚30kHzˈ⊶䭓Ў100km̚10kmDŽ 3 4 1 ⼎DŽ3.4.1⬉⌕ ⬉⺕ ⼎⬅Ѣ䌯䘧 䖰䖰 Ѣ⬉⺕⊶⊶䭓ˈ ℸ 㒓䰘䖥㛑 ⱘ⬉⺕㛑䞣䴲 Ϩ ҹ 㾚Ў㓧 ⺕ ˈҢ㗠 ✻䴭 ⺕ ⱘ ⧚ ⊩ 㦋 㒓 ⱘ⺕ ˈҢ㗠 ⦄ԡ㕂Ẕ⌟DŽḍ ↩ -㧼Ӥ ⬉⺕ ⶹ˖ 䗮 ⬉⌕I䭓 LⱘⳈ 㒓 ⬉⺕ ˈ䎱⾏ 㒓r P⚍˄ 3.4.2 ⼎˅⬉⺕ Ў˖1˖2Ѩ ⫳Ā亲 ā 㛑≑䔺ゲ䌯3.4.2䭓LⱘⳈ 㒓⬉⺕Ԍ 䰤䭓Ⳉ 㒓ϞˈϞ ©1=0ˈ©2=±ˈ33.4.3 ⼎DŽ3 4 3 䰤䭓Ⳉ 㒓⬉⺕䰤䭓Ⳉ 㒓 ⱘ⬉⺕ Ўϔ ϔ ⱘ ˈ Ϩ 䱣r ⱘ䍟 DŽḍ 䖭Ͼ⡍ ˈ Ӏ ҹ䅵ㅫ ⬉⺕Ӵ 䎱⾏Ё Ⳉ 㒓ⱘ䎱⾏ˈҢ㗠⹂ 䔺 䌯䘧Ϟⱘԡ㕂DŽϝゴ 㛑䔺⹀ӊ㋏㒳ϝǃӴ 䗝⬉⺕Ӵ ҹ㒓 Ў 䗖DŽ ⫼ⱘ⬉ 㒓 㡆⦃⬉ ǃ ⬉ ˈ Ϩ ҹ ✻䳔∖䖯㸠⬉ 䅶 DŽԚ ˈЎњㅔ 䍋㾕ˈ Ӏ䗝 ⬉ 㡆⦃⬉ ЎẔ⌟㒓 DŽ Ӏ䗝⫼10mH⬉ ЎẔ⌟Ӵ DŽ10mH⬉ ⾡㾘Ḑˈ 㾕ⱘ㾘Ḑ 6x8ǃ8x10ǃ10x12ˈ㸼⼎ⱘ ⬉ Ⳉ 催 DŽⳈ 䍞 催 䍞催ˈ Ⳉ 㒓 ϔԡ㕂㦋 ⱘ⬉⺕㛑䞣 䍞 ˈӴ 㦋 ⱘ 䍞 ˈԚ ⱘ⬉ Ӯ Ӵ 䞡䞣ˈ 䍋 Ẅ㒧 䯂乬DŽ 㒣 ӫ 䗝 П ˈ Ӏ䗝 њ6x8 ⬉ ˈ100mAⳈ 㒓⬉⌕ 㛑Ẕ⌟ Ў40mV ⱘ⬉ ˈ㛑 ⒵䎇 Ӏⱘ㽕∖DŽ ˈ ѯӴ ӀгՓ⫼њ8x10ⱘ ⬉ 10mH㡆⦃⬉ ˈ䖭㽕㾚 偠 Փ⫼ ⾡⬉ DŽ Ӏ䗝⫼ⱘ⬉ 3 4 4 ⼎DŽ3 4 410mH⬉ ḋǃ䗝乥ǃ ǃ ⌕䗝乥 Ӏ䗝 њ㒘 Ӯ 㤤 Ḝ> @ˈ ⫼10mH⬉ 6 8nF⬉ 㒘 RLC 㘨䇤 䏃䖯㸠䗝乥ˈ ⧚ϡ 䆺䗄DŽ Ӏⱘ䞡⚍ Ѣ 䚼 ˈ ԩ䗝 Ḝ Ўӏ ⱘ 䬂DŽϝ ㅵԧ⿃ ˈ ӫ Ѣ䗝 ˈӋḐⳌ Ԣ DŽ Ḝ ˈ Ӏ 䖭 䴶ϟ䖛䆌 ˈԚ ⱘ ϡ ⧚ DŽ ⧚Ѩ ⫳Ā亲 ā 㛑≑䔺ゲ䌯⧚ˈ ⱘ ⸔Ϟˈ Ӏ⏏ 䖛䆌 ↨ 作ǃ Ⓒ⊶⬉䏃ㄝˈԚ Ў ⱘ⬉䏃䕗Ў ˈ Ϩ ⬉䏃䋼䞣㽕∖䕗催㗠 DŽП Ӏ 䕀 䞛⫼䖤ㅫ DŽⱘӬ Ѣ ⫼ˈ 䕗 DŽ䆒䅵П ˈ Ӏ ӫ 䖤 Ё䗝 њϔ 䖤ㅫ DŽ䗝 ⱘ Ў˖ ⬉⑤ǃԢ⬉ ǃԢ ǃ !20KHZDŽ 㸼3 4 1 ⼎˄ ӫ ˈҙ Ё ӊ˅DŽ㸼3 4 1䖤 䗝ӊ ㅔ䗄ӋḐ_QuantityƻOPA365Ԣ⬉ 2 2V Ԣ ⬉⑤䔼㟇䔼䖤 ˈ 50MHZ0 80㕢 _1ku˄ ˅TLV2262Ԣ⬉ ˄2 7V 8V˅Ԣ 㗫䔼㟇䔼䖤 ˈ 0 67MHZ0 65㕢 _1ku˄ ˅TLV2472Ԣ⬉ ˄2 7V 6V˅ 䏃Ԣ 㗫䔼㟇䔼䕧 䕧 ˈ 2 8MHZ1 45㕢 _1ku˄ ˅TLC2272Ԣ⬉ ˄4 4V 16V˅ 䏃Ԣ 䔼㟇䔼䖤 ˈ 2 18MHZ6 PCSINA322Ԣ⬉ ˄2 5V 5 5V˅Ԣ 㗫䔼㟇䔼Ҿ㸼 ˈ 500KHZ1 10㕢 _1ku˄ ˅AD8629䳊ⓖ⿏ǃ ⬉⑤˄2 7V 5 5V˅ǃ䔼㟇䔼䕧 䕧 䖤ㅫ 1 47㕢 _1ku˄ ˅AD620Ԣⓖ⿏ǃԢ 㗫Ҿ㸼 ǃⲞ䆒㕂㣗 1㟇100004 01㕢 _1ku˄ ˅MC33502Ԣ⬉ ˄1V 7V˅䔼㟇䔼䖤 ˈ5MHZ˄5 0V˅16 82 PCSLM358 ⬉⑤ǃ ⬉ ˄3V 32V˅䲚䖤0 6 PCSLM386Ԣ⬉ ˄4V 12V˅⬉ Ⲟ20 2000 35 PCSLM324N ⬉ ˄3V 32V˅ 䖤ㅫ 0 65 PCS⊼ƻ1˖㸼3.4.1ЁӋḐϔ ҙկ 㗗DŽӀӴ 䖤 䗝 䇧ϔ⊶ϝ ˈҢ 㾕ⱘLM358 ⱘ䲚 䖤 ˈҢ䗮⫼䖤 Ҿ㸼 ˈ⫮㟇 Ā Пⱛā㕢⿄ⱘĀ SāNE5532䛑 䖛⍝ DŽԚ 㒣䖛 Ͼ ⱘ䗝 ⌟䆩ˈ Ӏ䖬 њ 䗖ⱘ䖤 DŽ䩜 ҹϞ ӊˈ Ӏ䗝 њTLC2272ǃAD8629ǃLM358ǃLM386䖯㸠 ⌟䆩DŽϟ䴶 Ӏҙ TLC2272 LM386ⱘ⌟䆩 䖯㸠䇈 DŽϝゴ 㛑䔺⹀ӊ㋏㒳TLC2272ЎTI ⬉⑤䔼㟇䔼䖤 ㋏ ˈ䔼㟇䔼䕧 ҹՓ䖤 䕧 䖒 ˈ ℸ㛑 Ӵ 䕧 䎇 ˈ⒵䎇AD䞛ḋ䳔∖ⱘ㊒ DŽ 偠Ё Ӏ䞛⫼ⱘ⬉䏃 3 4 5 ⼎DŽ3 4 5ISIS7Professionalӓⳳ⦃ ϟTLC2272⬉䏃䕧 Ў20KHZǃ20mV ˈ⬉⑤⬉ 6Vⱘ ϟˈ䇗㡖 作⬉ԡ RV1 ҹ㦋 䕧 ⬉ 5.6VDŽ ⫼ 䔺㋏㒳Ё ˈ 䳔㽕䇗㡖 ˈՓ䕧 ϡ㛑䍙䖛5VDŽ 3.4.6 ⼎DŽ3.4.6ISIS7Professionalӓⳳ⦃ ϟTLC2272ӓⳳ⊶Ѩ ⫳Ā亲 ā 㛑≑䔺ゲ䌯⬉ 㛑 㕢 ˈ ⴔ 䅽AD䞛ḋDŽ Ўㅔ ⱘ ⊩ 䅽ADⳈ 䞛ḋ䕧 ℷ ⊶ˈԚ 䖭ḋӮ㒭 䋳 ˈ Ё䳔㽕䖯㸠 䞛ḋ䅵ㅫ 㛑 䔺ˈ Ϩ ⊶ DŽ ℸˈ Ӏ ✻㒘 Ӯ կⱘ 㗗 Ḝ> @ˈ Ѡ ㅵ ⌕⬉䏃 ⫼䖛 ˈ ⱘ⬉䏃 3 4 7 ⼎DŽ3 4 7ISIS7Professionalӓⳳ⦃ ϟTLC2272⬉⺕Ӵ ⬉䏃ӓⳳ⊶ 3.4.8 ⼎DŽ3.4.8ISIS7Professionalӓⳳ⦃ ϟTLC2272⬉⺕Ӵ ӓⳳ⊶ϝゴ 㛑䔺⹀ӊ㋏㒳Ң 3 4 8Ё ҹ ⦄ˈ㒣䖛Ѡ ㅵẔ⊶ Ϟ䋳䕑П ˈ 㒜㦋 ⱘⳈ⌕ ⊶ ㉏Ԑ䬃啓⊶ˈ䖭 ⬅Ѡ ㅵ ⌕⬉䏃 ⧚ ⱘDŽ 3 4 7 ⼎ˈC4ǃD1ǃD2ǃR3ǃC3 Ѡ ⌕⬉䏃ˈ ЁR3Ў䋳䕑⬉䰏ˈC3䍋Ⓒ⊶ ⒥ ⱘ⫼DŽ㱑✊ 䕧 ⱘ ㉏Ԑ䬃啓⊶ˈԚ ϡ ˈҙЎ150mVˈ 䳔㽕䕃ӊ ⧚ˈ ℸ䖭 Ӏ㛑 㒇ⱘDŽ ↨ 3 4 6 3 4 8ϸ ˈ Ӏ ҹ ⦄ ⱘ䕧 ℷ ⊶ˈ Ϟ ⌕⬉䏃 ⭌ њˈ AD ⱘAD8629г ⦄䖛䖭⾡ DŽ䖭 ⬅Ѣ䔼㟇䔼䖤 䕧 㑻 ⱘDŽ 䰙⹀ӊ Ёˈ Ӏ 䳔 催䋳䕑⬉䰏㟇100k ¡ 500K¡㣗 ⱘ ˈ ҹ 䆕TLC2272䕧 ϡ ˈ Ϩ䰡Ԣњ 㒜䕧 ˈՓП ѢAD䞛ḋDŽ 3 4 9 ⼎DŽ3.4.9 䋳䕑⬉䰏 ⬉⺕Ӵ ӓⳳ⊶Ϟ䗄⌟䆩 ҹ㸼 TLC2272Ӵ Ḝⱘ 㸠 DŽ 䰙⹀ӊ Ёˈ Ӏг њϔ Ӵ DŽԚ 㒜 ЎӋḐⱘ ˈ Փ Ӏ њ ϔ⾡Ӵ DŽ Ӏ⹂ њ ӀⱘЏ㽕Ӵ ḜЎLM386 ḜDŽLM386 ϔ⾡䷇乥䲚 ˈ 㗫Ԣǃ⬉ Ⲟ 䇗ǃ ⬉⑤⬉ 㣗 ǃ ӊ ˈ 䇤⊶ ⳳ ⱘӬ⚍ˈ ⊯ ⫼ ䷇ ЁDŽLM386 㛮 3.4.10 ⼎DŽѨ ⫳Ā亲 ā 㛑≑䔺ゲ䌯3.4.10LM386 㛮LM386ⱘ1ǃ8 㛮Ў Ⲟ䆒 㛮ˈ7㛮Ў 䏃⬉ 㛮ˈ ϟⱘ Ў⬉⑤ 䖤 䕧 䕧 㛮DŽLM386ϔ㠀⫼⊩ 3.4.11 ⼎DŽ3.4.11LM386ϔ㠀⫼⊩ϔ㠀⫼⊩Ёˈ1㛮 8㛮П䯈ⱘ⬉䰏 ҹ Ⲟˈ Ў0 ˈ ҹ㦋 ⲞDŽ Ӏ䗝 њӴ 䗮䖛䇗㡖䖭Ͼ⬉䰏 ҹ㦋 䗖ⱘ DŽ ⫼ 䔺Ӵ ˈ ҹ㊒ㅔϔѯ ӊˈӴ Ҫ䚼 Ѻ 䴶 䗄DŽ Ӏ 㒜Ӵ ⬉䏃 3.4.12 ⼎DŽ3.4.12Ӵ ⬉䏃 㒜⠜Ӵ ЁՓ⫼ⱘѠ ㅵЎ㙪⡍ Ѡ ㅵˈ ⫼ⱘ SS12ǃSS14ǃSS34ㄝDŽ㙪⡍ Ѡ ㅵ ⬉ ϔ㠀Ў0 1V 0 3Vˈ ℸ Ӏ ҹ 䕧 ⱘ 㣗 Ң㗠 ϾӴ ⱘ♉ DŽӴ 㡎Ϟ Փ⫼њ 䌈⠛DŽ䖭ḋ Փ ӀⱘӴ ㊒㟈〇 DŽ ˈ ⫼ 䔺㋏㒳Ё䖬䳔㽕⊼ Ⓒ䰸⬉⑤Ϟ䴶ⱘ DŽѨǃӴ㒣䖛 偠⌟䆩ˈ Ӵ Џ㽕 ҹϟ ⾡ DŽ 3 4 13 ⼎DŽ3.4.13ӴѨ ⫳Ā亲 ā 㛑≑䔺ゲ䌯ḍ 㒘 Ӯ 㤤Ẕ⌟ 㗗 Ḝ> @ˈ ⊩ϔЁˈ䆒ϸϾ⬉ Ⳍ䎱䭓 ЎLˈ⬉ 䎱⾏ 㒓催 h,ϸϾ⬉ Ё ⿏䌯䘧 㒓ⱘ䎱⾏Ўxˈ ҹ䅵ㅫϸϾ⬉ ⬉ ⱘ E d˖4䆒L=30cmˈ E d 3.4.14 ⼎DŽ3.4.14 ⬉ E dϢ䎱⾏xП䯈ⱘҢ 3 1 14 ҹⳟ ˈ Ӵ Ё 䌯䘧Ё ˈE d Ў0DŽ 㒓 ⿏ˈ ⬉ Ѣ0˗ Пˈ 㒓 ⿏ˈ ⬉ Ѣ0DŽ ℸ 0ѝ30cmП䯈ˈ⬉ E dϢԡ⿏x ϔϾ 䇗 DŽ ҹՓ⫼䖭Ͼ䞣 Ѣ 䔺䕀 䖯㸠䋳 作 ˈҢ㗠 䆕ϸϾ㒓 ⱘЁ ԡ㕂䎳䏾䌯䘧ⱘЁ 㒓DŽ䗮䖛 㒓 催 h 㒓 П䯈䎱⾏L ҹ䇗 ԡ㕂Ẕ⌟㣗 ҹ ⬉ ⱘ DŽϝゴ 㛑䔺⹀ӊ㋏㒳ℸˈ ⊩ϔ ⊩Ѡ 䳋 ˈ ⊩Ѡ㊒ 催ˈ㛑 Ẕ⌟ⱘ䌯䘧㒉 䎱⾏ DŽ ⊩ϝⱘ ⧚ Ϣ ⊩ϔǃѠ ϡ DŽ ⊩ϝ ⫼㒓 ⾏ 㒓䍞䖰 ⬉ 䍞 ⱘ ⧚ Ẕ⌟ⱘDŽḍ 㒘 Ӯ 㤤Ẕ⌟ 㗗 Ḝ> @ˈ ҹⶹ䘧ˈ ⬉ E ԡ㕂xⱘ ˈ ⦄ 3 4 15 ⼎ⱘ ㋏DŽ3.4.15 ⬉ EϢ䎱⾏xП䯈ⱘ⬅ℸˈ Ӏ ҹ䗮䖛⌟䞣6Ͼ˄ 㗙8Ͼ˅⬉ 㒓 Ӵ 䞛䲚ⱘ ⹂ 㒓ⱘԡ㕂DŽ 偠㒧 㸼 ˈ ⊩ϝ ㊒⹂ⱘԡ㕂㾷ㅫ㛑 ˈ Ϩ Ѣ䗳 DŽՓ⫼ ⊩ϝˈ Ӏ㦋 њ䖭ϝ⾡ ḜЁ Ӭⱘ 㒽DŽ ℸˈ Ӏ 㒜⹂ Ӵ ḜЎ ḜϝDŽЎњ䕃ӊ⌟䆩ⱘ䳔㽕ˈ Ӏ䆒䅵 њϔ㋏ ϡ 䭓 ǃϡ ⬉ ǃϡ 䖤 ⱘӴ DŽ䗮䖛䖭ѯӴ ˈ Ӏ䇗䆩 䗖 㞾 䔺ⱘ Ӭ DŽ 3 4 16ˈ ⼎њ Ӏⱘ䚼 Ӵ ḋ DŽѨ ⫳Ā亲 ā 㛑≑䔺ゲ䌯3.4.16Ӵ ḋ3.5⌟䗳 䗝⫼⌟䗳ⱘ ⫼ 䳡 Ӵ ǃ ⬉Ӵ ǃ⌟䗳⬉ ǃ㓪ⷕ ⾡DŽ ӀЏ㽕䞛⫼ῑ ⬉ ㅵ䆒䅵ⱘ⌟䗳Ӵ ˈԚ Փ⫼䖛Ё ⦄䖭⾡ ⌟䞣㊒ ϡ催ˈ Ϩ〇 ϡ DŽ㒣䖛 䗝 ⌟䆩 ˈ Ӏ䗝⫼㓪ⷕ 䖯㸠⌟䗳DŽḍ ϡ ⱘ⌟䗳㊒ 㽕∖ˈ Ӏ 䗝⫼њ100㒓ǃ200㒓ǃ600㒓 䕀㓪ⷕ DŽ㒓 䍞催ˈ⌟䗳㊒ 䍞催ˈԚ ԧ⿃ 䍞 DŽ Ӏ 㒜䗝⫼њ200㒓 600㒓ϸ⾡㓪ⷕ ˈ Ў 啭 ⱘE6A2-CS3E 䫵䨿Ѯ⬉ 䰤 ⱘA88S-6-6002-N-5DŽՓ⫼䖭ϸ⾡㓪ⷕ 䎇 ⒵䎇㊒ 䳔∖ˈ Ϩ䕧 ˈⳈ 䕧 ⌟䗳㛝 ˈկ ⠛ 䞛ḋҹ㦋 䗳 DŽ㓪ⷕ Ӏ 㺙 䔺 䚼ˈ 㺙 Ẅ㒧 䇗䆩䚼 䇈 ˈℸ Ң⬹DŽㅜ ㄐ䚃䐟 Ⲵ䟷䳶 Ր Ⲵ4.4 Ֆ ⲺѪҶ 䖖┑䏣⡜ Ⲵ㾱≲ˈ㔬 Ր Ự⍻Ⲵ䐍ˈԕ 䇢Ⲵ䎋䚃⻱ Ⲵ ˈ Ԝ 㓸⺞ ҶՐ ≤ Ⲵ ˈ л ⽪˖Ր Ⲵ䈤 ˖Ր Ѫє ≤ ˄ к ˅ˈ⭡Ҿ⭥⻱ 䖖 ⷫ䐍 ㊣ˈ ԕ Ԝ 享 ⺞Ⲵ 䎋䖖⧠ Ⲵս㖞ˈ 䖖㜭 䖳儈Ⲵ䙏 ˈ ↔ 䶒йњՐ ⭘Ҿ 䖜 ˈ 䶒єњ ⭘Ҿ 䖖 Ҿ䎋䚃Ⲵս㖞DŽ4.5 㔉⭡Ҿ⭥⻱㓴∄䎋 ㅜа ∄䎋ˈ Ր Ⲵ䘹 о к Ԝ㣡Ҷ Ⲵ 䰤ˈ Ѫ䘉 ㌫ 䖖㜭 儈䙏䘀㹼ˈҾ Ԝ䇮䇑Ҷањ∄䖳 Ⲵ ≤ 㖞Ր Ⲵ ṸDŽㅢӂㄖ㌱㔕⺢Ԭ䇴䇗㾱 ⧠⭥⻱䖖Ⲵ 㜭ˈ 享俆 ⺜Ԧ DŽ ➗⭥⻱䖖փ㌫㔃 ˈ䴰㾱䇮䇑Ⲵ⺜Ԧ⁑ Ր ǃ ǃ 㹼 ǃӪ ⭥Ⓚㅹ䜘 DŽ2.1 ⭫ Ỷ⎁ ⌋⭥⻱䖖㾱Ự⍻Ⲵ䎋䚃⧟ ⭡䙊 20kHzǃ100mA Ӕ ⭥⍱Ⲵ 㓯 ӗ⭏Ⲵ⭥⻱ DŽ⭥⻱ Ự⍻ 䈮仈㾱䀓 Ⲵㅜањ 䭞 ˈ䴰㾱俆 ⭥⻱ 䘋㹼 ⁑ˈ❦ ṩ ⁑㔃 䘹 䘲Ⲵ⭥⻱Ր DŽ2.1.1 ⭫ ⁗ṩ 哖 世⭥⻱ ⨶䇪ˈӔ ⭥⍱Պ ӗ⭏Ӕ Ⲵ⭥⻱ DŽ䎋䚃ѝ⭘Ҿ䐟 ⲴӔ⍱⭥⍱仁⦷Ѫ N+]ˈӗ⭏Ⲵ⭥⻱⌒ Ҿ⭊վ仁˄9/)˅⭥⻱⌒DŽ⭊վ仁仁⦷㤳 Ҿ 仁 վ仁⭥⻱⌒ѝ䰤ˈѪ N+]̚ N+]ˈ⌒䮯Ѫ NP̚ NP> @DŽ㓯 Ⲵ⭥ ⻱ ˈ ➗а 㿴 DŽ䙊䗷Ự⍻ Ⲵ⭥⻱ Ⲵ ԕ 䗷 㧧 䐍 㓯Ⲵオ䰤ս㖞ˈ䘉 ⭥⻱䖖 䎋䚃 Ⲵ ⌅DŽնӔ ⻱ ⁑ ˈⴤ Ӕ Ⲵ⭥⻱ 䳮 䖳 DŽ ⭡Ҿ䎋䚃 ⭥㓯 䖖 䜭䘌䘌 Ҿ⭥⻱⌒Ⲵ⌒䮯ˈ⭥⻱ 䗀 㜭䟿 ˄ 㓯Ⲵ䮯 䘌 Ҿ⭥⻱⌒䮯ˈ Ӕ ⭥ ˈ⭥⻱⌒䗀 ⦷↓∄Ҿ 㓯䮯 Ⲵ ⅑ ˅ˈ ԕ㜭 ⭥⻱⌒Ⲵ㜭䟿䶎 > @DŽѪ↔ˈ Ԝ 㓯 Ⲵ⻱ 䘁լ㕃 Ⲵ⻱ ˈ ➗Ự⍻䶉 ⻱ Ⲵ ⌅㧧 㓯 Ⲵ⻱ ˈ❦ 㔃 ⭘ Ӕ Ⲵ ԦлˈӾ㘼䘋㹼ս㖞Ự⍻DŽ⭡∅ 㩘⌅ ⨶ ⸕ˈオ䰤ԫа⛩Ⲵ⻱ ԕⴻ 㓯к⭥⍱ l Id &ӗ⭏Ⲵ⻱ ѻ > @ˈ ˖ㅜҼㄐ㌫㔏⺜Ԧ䇮䇑³³u 304a a l Id B d B &&&&S P ˄ѝ ±h 1 $ ˈa & ⭥⍱ オ䰤⛩Ⲵ⸒䟿DŽк䘠〟 аӋ⢩ Ⲵ 㓯л ԕ≲ 䀓 䀓ˈ Ҿа㡜Ⲵ 㓯ˈ ԕ䙊䗷 〟 ≲ 䀓ˈ㤕㾱㘳 њオ䰤Ⲵ⻱ ˈ 㜭 ҾаӋуъⲴ⭥⻱ 䖟Ԧ䘋㹼 オ䰤Ⲵ ԯⵏˈ∄ $QVRIW 0D[ZHOOˈ&67 (0 6WXGLR ㅹDŽ ❦䘉 Ҿ⭥⻱ Ⲵ 䈤ˈ ⯁ Ҷ ⁑䳮 DŽӾ∄䎋 ⭘䎋䚃Ⲵ ⴻˈ䎋䚃а㡜 ԕ ⴤ䚃ǃ䖜 ǃ6䚃ǃ ⧟䚃ǃӔ 䚃ㅹ ˈ ѝⴤ䚃 ㆰ Ⲵˈ ↔ˈ ᾊⴤ䚃 лⲴ⭥⻱ DŽ㔬кє 䶒ˈ䰞仈 ԕㆰ Ѫ˖䙊 っ ⭥⍱,䮯 Ѫ/Ⲵⴤ 㓯ˈо 㓯䐍ѪU Ⲵ3⛩ˈ ⻱ Ѫ˖³ 21sin 40T T T T S P d r I Bⴤ 㓯っ ⭥⍱Ⲵ⻱ > @ ⭡↔)cos (cos 4210T T S P r I BҾ 䲀䮯ⴤ 㓯 䈤ˈ© ˈ© ±ˈ⭏ 㜭⊭䖖ㄎ䎋 r IB S P 20ⴤ 㓯っ ⭥⍱⻱ ⽪⽪ˈ ⻱ Ⲵ ԕ 㓯Ѫ䖤Ⲵа㌫ Ⲵ DŽ кⲴ⻱ ˈ 䲿⵰䐍 㓯Ⲵ U ∄л䱽DŽ 䶒儈 ѪK Ⲵ≤ 䶒кⲴ⻱ ˈ Ҿ䮯ⴤ 㓯ˈ Ҿ 㓯 䫵 䶒 〠Ⲵ˗㘼 Ҿ 㓯ˈ 䎋䚃Ⲵ 䚃 ˈ 㓯 ⻱ 㓯 䖳 ˈ ⻱ 䖳 ˈ 䖳 DŽն⭡Ҿ䎋䚃䖜 䖳 ˄ FP˅ˈ 㘼⻱ Ⲵ н DŽ2.1.2 ⭫ Ỷ⎁ ⌋⧠ Ԝ ⍻䟿⻱ Ⲵ ⌅ˈ⻱ Ր ⭘Ҷ⢙䍘о⻱ ѻ䰤Ⲵ ⿽⢙⨶ ˖⻱⭥ ˄⭥⻱ ǃ䴽 ǃ⻱㠤⭥䱫 ˅ǃ⻱ Ỡ ǃ⻱ ǃṨ⻱ ǃ䎵 փо⭥ 㠚 䟿 DŽл䶒 ҶаӋ⍻䟿 ⨶ԕ ⲴՐ > @˖˄ ˅ ⭥⻱ ⻱ ⍻䟿 ⌅˖⭥⻱ 㓯 ˈ⻱䙊䰘⻱ Ր ˈ⻱⭥䱫DŽ˄ ˅ ⻱ Ỡ ⻱ Ự⍻ ⌅˖ 䪸ˈ ㉗㇑DŽㅜҼㄐ㌫㔏⺜Ԧ䇮䇑˄ ˅ 䴽 ⻱ ⍻䟿 ⌅˖䴽 Ր ǃ⻱ Ҽ ㇑ˈ⻱ й ㇑DŽ ˄ ˅ ⭥䱫 ˄$05˅⻱ ⍻䟿 ⌅DŽ˄ ˅ 䖭⍱ 㠚 ӂ ⭘⻱ ⍻䟿 ⌅˖ ⻱ ⻱ ⭥䱫˄*05˅ǃ㠚 䰰й ㇑⻱ Ր ǃ䳗䚃⻱㠤⭥䱫 ⻱ ⭥䱫DŽ ˄ ˅ 䎵 䟿 ⎹˄648,'˅⻱ ⍻䟿 ⌅˖648,' 㮴㟌⻱ ԦDŽ ˄ ˅ ⌥⻱ ⍻䟿 ⌅˖ ⌥⻱ Ր DŽ˄ ˅ 䍘 ⻱䘋 ⻱ ⍻䟿 ⌅DŽ˄ ˅ 㓔㔤⻱ ⍻䟿 ⌅DŽԕк ⿽⻱ ⍻䟿 ⌅ Ⲵ ⨶ н ˈ ⚥ Ự⍻㤳 ˈ 仁⦷ǃ ǃԧṬǃ 㙇ԕ ⧠Ⲵ䳮 〻 ㅹҏ 㾱㘳㲁Ⲵ䟽㾱 DŽ⧠ к∄䖳 䍝Ҡ Ⲵ 䘹Ր ⭥⻱ 㓯 ǃ⻱ ⭥䱫ǃ䴽 Ր ǃ⻱ Ҽ ㇑ǃ⻱ й ㇑ǃ*05 ⻱⻱䱫ㅹㅹDŽ Ԝ䴰㾱䘹 䘲 ⭥⻱䖖ⲴỰ⍻ ⌅ˈ俆 㾱㘳㲁⚥ ǃỰ⍻㤳 仁⦷DŽѝˈ , $ˈU Pˈ % h 7 h *VDŽҏ 䈤ˈ 䎋䚃 㓯䱴䘁Ⲵ⻱ *VⲴ 䟿㓗DŽӾỰ⍻㤳 ⴻˈ⻱ ⭥䱫 *VⲴ 䟿㓗ˈ䴽 Ր a *VⲴ 䟿㓗ˈ⻱ Ҽ ㇑ ⻱ й ㇑䜭 *VⲴ 䟿㓗ˈ*05 ⻱⻱䱫 *VⲴ 䟿㓗ˈ䘉Ӌ⭥⻱Ր 䜭н㜭䗮 Ự⍻㾱≲DŽ⭥⻱ 㓯 Ҿ 㓯ˈ Ự⍻㤳 о㓯 ⣦ǃ ǃ⻱㣟ㅹ ˈн Ⲵ 㓯 Ự⍻㤳 ˈ ⭘Ⲵ 㓯 Ự⍻㤳 ԕ䗮 *VⲴ 䟿㓗DŽ 㿱⭥⻱ 㓯 䘹 ˈ 䘈 ⨶ㆰ ǃԧṬ ǃփ〟 䖳 ǃ仁⦷ ㅹՈ⛩DŽP+䭽䬼 㓯䱵䘹⭘⭥ Ѫ P+ǃ⻱㣟Ѫ䭽䬼 Ⲵ 㓯 Ѫ⭥⻱Ր ˈ 4 䖳儈ˈ Ⲵ⻱㣟ˈ䗃 DŽ䎋䚃 㓯ѝ䙊 N+] P$Ӕ ⭥⍱ˈ Ⲵ⭥⻱ о⭥⍱ а㠤 ˈ ⻱ ԕ⮨ Ⲵ ⌒ Ӕ ˈ D DŽ ⭥⻱Ր ⭘ 䙊オ 㓯 ˈ ⭥ ⻱ Ӕ ⷜ䰤Ⲵ↓䍏⭏ 㜭⊭䖖ㄎ䎋㜹 ˈ E ˗ ⭘䭽䬼 㓯 ˈ⭡Ҿ⻱㣟Ⲵ⻱┎⧠䊑ˈ ⭥ 㓿䘹仁 䘁Ҿ↓ ˈ F DŽDEF⻱ ⽪ > @ṩ ⌅ ㅜ⭥⻱ ˈ㓯 ⻱ Ր Ⲵ 䜘 ⭥ (о⻱ % W ǃ⭥⻱㓯 Ⲵ 1ǃ 䶒〟$Ⲵ ㌫ > @˖dt t d dt t dB NA E )()()()(0) u P P⭥ Ⲵ ԕ⭘ᾎ⅑ ⺞ DŽ⭡Ҿ 㓯ѝ⭥⍱仁⦷䖳վˈ 㓯 䶒䖳 ˈ 㘼 ԕ䇔Ѫ 㓯 㤳 ⻱ ˈ 㓯 ѝ ⭥ 䘁լѪ˖dt dI r k dt t d E ) )(⭥ о⭥⍱ ⦷ ↓∄ˈо㓯 㓯䐍 ∄DŽ ѝN о㓯 䶒〟ǃ ǃ⻱㣟⻱ ⦷ 㓯 ㅹ Ⲵ 䟿˗ Ҿ а 䎋䚃ˈG, GW н Ⲵˈ . NG, GWˈ ˖r K E 1ㅜҼㄐ㌫㔏⺜Ԧ䇮䇑⭥ ( о㓯 㓯䐍 DŽ2.2 Ֆ ⁗ 䇴䇗2.2.1 Ֆ ⨼㓯 Ⲵ 㓗 н㜭ⴤ ⭡ ⡷ 䈫 ˈѫ㾱 ԕл ⛩˖˄ ˅ N+]Ⲵ 䟿䉀⌒˗˄ ˅ 䖳 ˈ㓿$'䖜 н ˗˄ ˅ Ӕ⍱ н㜭ⴤ $'˗˄ ˅ Ⲵ н ҾỰ⍻DŽ䪸 к䘠䰞仈ˈ 䘋㹼䘹仁ǃ Ự⌒ ⨶ˈ ԕ㧧 っ Ⲵǃ䲿䐍U Ⲵ⭥ ˈ ⽪DŽ㓿 ⨶ Ⲵ ⭥ 86ǃ㓯 㓗 (ԕ 㓯 о 㓯Ⲵ䐍U л ㌫˖r M r mK mE U S 11ѝP о⭥䐟 Ⲵ䟿ˈ0 P.DŽ 㿱 ⨶ Ⲵ ԕ 㓯 о 㓯Ⲵ䐍ˈ䘉ṧ 㧧 Ҷ ⡷ ԕ䈫 Ⲵ DŽ˄a ˅ ㇑ Ӕ⍱ ⭥䐟⭏ 㜭⊭䖖ㄎ䎋˄b ˅ Ự⌒⭥䐟2-5 Ր ⭥䐟2.2.2 Ֆ 䇴䇗ѝ% 䐍 㓯U Ⲵ⻱ ˈ ањ⸒䟿 ˈ㘼 㓯 㜭Ự⍻ 㓯 䖤㓯 кⲴ 䟿DŽ⻱ 䟿⽪・ Ⲵ㓯 ԕ⍻ %Ⲵ ⴤ 䟿%9ˈ Ⲵ㓯 ԕ⍻ %Ⲵ≤ 䟿%+ˈ Ҿ⸒䟿䇑㇇ ˖H V B B B &&&ㅜҼㄐ㌫㔏⺜Ԧ䇮䇑⭡ҾՐ 㖞儈 Kˈ 㘼 䱵䴰㾱Ự⍻Ⲵ 㓯 о 㓯Ⲵ≤ 䐍GDŽ %9ǃ%+оG Ⲵ ㌫> @˖2202cos h d dI B B V S P T2202sin h d hI B B H S P T%9 G %+ G ⽪ˈ%9 G Ⲵє 䜭䶎 䈳ˈ 㘼н㜭⭘・ 㓯 Ự⍻G˗ ⽪ˈ%+ G є 䈳ˈ 㘼 ԕ⭘ 㓯 Ự⍻GDŽ⭡ ⸕ˈ 䶉 ⻱ %+ ˖22h d hN mnB mE U H sҏ 䈤ˈ , K а ˈ㓿 ⨶ Ⲵ䗃 ⭥ 8V о%+ G Ⲵ 㓯ˈ ⽪DŽ䇮䇑Ր ⁑ Ѫ њ⁚ 㓯 а ˈ⇿єњ㓯 Ⲵ ԕ ањ䎋䚃ѝ ս㖞ˈє㘵 ˈ Ⲵս㖞Պ ㋮⺞DŽ12 2-9 Ր ⁑ ⽪⭏ 㜭⊭䖖ㄎ䎋2.3 䎭 㓵Ỷ⎁⁗ 䇴䇗➗∄䎋㿴 㾱≲ˈ䐁 а 䎋䖖䴰㾱㠚 → 䎧 㓯ѻ й㊣ѻ Ⲵ䎋䚃 DŽ ⽪ˈ䎧 㓯 㓯є䗩Ⲵ䮯 FPⲴ唁㢢㓯ˈ䎧 㓯ѝ䰤 㻵 ≨ѵ⻱䫱ˈ⇿а䗩 й DŽ⻱䫱 ˖ⴤ PPˈ儈 PPˈ㺘䶒⻱ *V> @DŽ䎋䚃䎧 㓯⽪䪸 к䘠㾱≲ˈ ⭘ ㉗㇑䇮䇑䎧 㓯Ự⍻⭥䐟 DŽ ㉗㇑ ⻱ Ỡ Ⲵ⻱ Ր ˈ 䜘 ањ 䀖⛩ ˈ ⻱ 䎵䗷 䰸 ˈ 䰝 DŽ ѝ њ ㉗㇑ 㚄ѪĀ㓯 ā ㌫ˈԫօањ ㉗㇑Ự⍻ ⻱䫱ˈ67$57B&+(4ㄟ䜭Պ䗃 ↓㜹 ˈ ѝ 〻 䎋䖖 䖖DŽ×3䎧 㓯Ự⍻⭥䐟ㅢпㄖՖ Ⲻ䘿3.1 Ֆ Ⲻ䘿⭡Ҿ䎋䚃 䙊 .+]Ӕ ⭥⍱Ⲵ 㓯ˈ ↔䴰㾱䙊䗷Ự⍻ 㓯 ӗ⭏Ⲵ⭥⻱ ⺞ 䚃䐟о 䖖Ⲵ ս㖞DŽ⻱ Ր ⭘Ҷ⢙䍘о⻱ ѻ䰤Ⲵ ⿽⢙⨶ ˈ ⻱⭥ ˄⭥⻱ ˈ䴽 ˈ⻱㠤⭥䱫 ˅ˈ⻱ Ỡ ˈṨ⻱ ㅹDŽ⧠ԓỰ⍻⻱ ⲴՐ ˈ 㿱Ⲵ ⻱䙊䰘⻱ Ր ˈ⻱䱫 ⻱ Ր ˈ փ䴽 Ր ǃ⻱ Ҽ ㇑ˈ⻱ й ㇑DŽ Ѫ ⿽Ր ⍻䟿⻱ Ⲵ ⨶н ˈ⍻䟿Ⲵ⻱ ㋮ 㤳 ҏ ˈ ̚ *DŽ Ѫ ㊫⻱ Ր Ⲵ⍻䟿㤳 ⽪ DŽ㊫⻱ Ր Ⲵ⍻䟿㤳 ⽪ՠ㇇䎋䚃Ⲵ⻱ DŽ 䎋䚃ⴻ 䲀䮯ⴤ 㓯ˈ䖭⍱Ѫⴤ⍱ P$ˈ䐍 㓯U FP ˈ⭡∅ 㩘Հ ⸕ˈ⻱ % ˄ ˅˖ G T r I B 37701041041005.021.042 u u u u u S S S P ˄ ˅ а㡜䴽 ԦⲴỰ⍻㤳 P7ԕкˈ *ԕкˈ ԕ 䊑 䴰㾱䍤⵰ 䶒ㅜйㄐՐ Ⲵ䘹 䘋㹼Ự⍻ˈ㘼ф㋮ 䲀 DŽ⻱䱫Ր +RQH\ZHOOⲴ儈⚥ ⻱䱫+0& ˈ 䗘⦷ 䗮 儈 ˈ䘈 ԕ ⭘ 䖤Ⲵ⻱䱫Ր Ự⍻н Ⲵ⻱ DŽ䙊Ⲵ⭥ 㓯 ⍻䟿㤳 ˈ⨶䇪к 㾱 к 䘲Ⲵ䉀 ⭥ ⭥䐟ˈнն㜭 ㆋ䘹 ⢩ 仁⇥䘋㹼 ˈ㘼ф 䖳 Ⲵ 㜭 DŽԜ䴰㾱䘹 䘲 䖖⁑ㄎ䎋ⲴỰ⍻ ⌅ˈ䲔ҶỰ⍻⻱ Ⲵ㋮ ѻ ˈ䘈䴰㾱 ҾỰ⍻⻱ ⲴՐ Ⲵ仁⦷ ǃ ǃԧṬǃ 㙇ԕ ⧠Ⲵ䳮 〻 䘋㹼㘳㲁DŽ⭡Ҿ䴽 Ԧ ⻱䱫Ր ⲴỰ⍻㋮ ∄䖳վˈԧṬ∄䖳儈DŽ 㘼 Ԝ䘹 ѪՐ㔏Ⲵ⭥⻱ 㓯 Ⲵˈ ⨶ㆰ ǃԧṬ ǃփ〟 ǃ仁⦷ ǃ⭥䐟 ⧠ㆰ ㅹ⢩⛩DŽ 㓯 ԕ㠚㹼㔅 ˈҏ ԕ䟷⭘ 䶒кⲴ ⭥ DŽ3.2 ⭫ 㓵 ѣⲺ⢯ѪҶ䇘䇪 ˈ Ԝ ԕл㓖 ˖䖖䖖փ ḷ㌫ѝˈ ѹ 䖖 䘋Ⲵ Ѫ<䖤↓ ˈ亪⵰<䖤Ⲵ 䗩Ѫ;䖤Ⲵ↓ ˈ=䖤 䖖↓к ˈ ⽪˗≤ 㓯 䖤㓯 㹼Ҿ=䖤Ⲵ⭥ 㓯 ˈ ⴤ㓯 䖤㓯 㹼Ҿ;䖤Ⲵ㓯 ˈ䖤㓯 㹼Ҿ<䖤Ⲵ㓯 Ⲵ⭥ 䘌 Ҿк䘠є㊫㓯 ˈն䈕㊫ 㓯 ⧟䐟Ự⍻ѝ ԕ⭘ DŽ%; 䖭⍱ 㓯 䗩Ⲵ⭥⻱ ˈ%= 䖭⍱ ↓к Ⲵ⭥⻱ DŽ ❦ˈ ⴤ㓯 Ⲵ %; ⦷ˈ≤ 㓯 Ⲵ %=Ⲵ ⦷DŽㅜӄ ⭏ 㜭⊭䖖ㄎ䎋3.2.1 䖖փ ḷ㌫ⴤ䚃䱴䘁Ⲵ⻱ ˈ ԕ䘁լѪ 䲀䮯Ⲵⴤ 㓯кⲴ⻱ ˈ ㇇ 䐍䮯ⴤ 㓯䐍ѪU Ⲵ⛩Ⲵ⻱ ˄ ˅˖r I B S P 20˄ ˅ 䘋㘼 ԕ ˖2202h x h I B X u S P ˄ ˅2202h x x I B Z uS P ˄ ˅ ѝK ⭥ 㓯 䐍 䶒Ⲵ ⴤ䐍DŽѪҶ䇘䇪Ⲵ ˈ䇠22'h x hB X ˄ ˅'h x xB Z˄ ˅ Ӿ˄ ˅ǃ˄ ˅ǃ˄ ˅ǃ˄ ˅ ԕ % ;ǃ% = %;ǃ%= Ⲵ 䎻 DŽ ⽪Ҷ K Ѫ ǃ ǃ % ; % =Ⲵ 䎻 DŽ⭡ ⸕˖ㅜйㄐՐ Ⲵ䘹% ; [Ⲵ ˈ <䖤є 䈳˗% = [Ⲵ ˈ <䖤є ⋑ 䈳 ㌫˗ Ⲵ儈 лˈ% ; % =Ⲵє ˈն [ Ⲵ ˈ% ; % =Ⲵа Ҷˈ ↔% ;Ⲵ㺠 䖳% = DŽ㔬к ⸕ˈ≤ 㓯 ∄䖳䘲 [Ⲵ↓䍏 ˈ ⴤ㓯 ∄䖳䘲 ⭘ 䀓㇇[Ⲵ փ ˈ% =䖳% ;㺠 ˈ䈤 ≤ 㓯 䘌 䚃䐟⣦ ∄䖳 ˈ ԕ⭘ 亴⍻ Ⲵ 䚃DŽ3.2.2 B'XⲴ 㓯3.2.3 B'ZⲴ 㓯ㅜӄ ⭏ 㜭⊭䖖ㄎ䎋3.3 Ֆ⭡ 䘠Ⲵ 䍘ˈ Ԝ ԕ⸕䚃ˈ ⴤ㓯 ԕ∄䖳 䖖о 㓯Ⲵ ս㖞ˈ≤ 㓯 ԕ亴⍻ 䚃ԕ Ր ⲴаӋ㾱≲DŽṩ 䘉Ӌ 䍘ˈ Ự⍻ 㓯ս㖞 ⷫє䜘 䇪䘠Ր Ⲵ ṸDŽ3.3.1⺤ 㓵փ㖤ԕ ⴤ㓯 ѪỰ⍻ 䖖о 㓯Ⲵ ս㖞ˈ к䟷⭘ ⴤ㓯 ԕ 㓯Ⲵս㖞DŽ❦㘼 Ր ԕ Ự⍻Ⲵ㋮ ˈ Ҿ 䖖Ⲵ㋮⺞ DŽ Ԝ䘹⭘ӄњ ⴤ㓯 䰤䳄а ˈ ⽪DŽ3.3.1 ⷫ Ր3.3.2 ⷱ䇴䇗⭡Ҿ 䖖䮯 ⴤ㓯 Ự⍻ 䲀 ˈ⭥⻱ 䖖Ⲵ ⷫ Ⲵ 䲀DŽ ㇑ 䖖䮯 䗮 Ҷ 䲀ˈ㘼 䖖Ⲵ ⷫ FP ˈн㜭┑䏣 㜭䖖儈䙏䘀㹼Ⲵ㾱≲DŽ ↔䴰㾱⭘ 㾱Ⲵ ⇥ 䖖Ⲵ ⷫ 㜭DŽ Ṹа˖ Ր DŽ Ր Ự⍻ аˈ㘼 Ր ԕ䙊䗷 㓯 ⦷ 㺕 ⷫн䏣DŽ⭡Ҿ Ր Ự⍻Ⲵ 䖳ѪѠ ˈ ԕ ⨶ ⭘ 䖜䀂ԕ 䙏 Ⲵ DŽ⍻䈅 ⧠Ⲵ⺞ՈҾ Ր DŽ ṸҼ˖ ⨶ Ր DŽ⭡Ҿ≤ 㓯 䘌 䚃䐟∄䖳 ˈ ԕ ⸕䚃䐟Ⲵ 䎻 ˈ ↔ ԕ ⭘䘉њ⢩⛩䘋㹼 ⷫDŽԕ¶ ⭥ 㓯 Ѫ ˈ䘉⿽ ⌅Ⲵ ⷫ ԕ Ր ս㖞Ⲵ к ⷫ㓖 FPⲴ䐟 DŽ Ⲵ 䀂 ˈ ԕ Ր ս㖞 к ⷫ㓖 FPa FPⲴ䐍DŽ䘉ṧˈㅜйㄐՐ Ⲵ䘹䖖Ⲵ ⷫ 䗮 㓖 FPDŽ Ự⍻㓯 ⴤ 䖳 ˈ ԕ 㓖 FP Ⲵ ⷫˈл〠Ā ⷫāDŽԜ䟷⭘о 䖖 䘋 а㠤Ⲵ ⌅DŽ䘉ṧⲴ ⷫ FPԕ ˈл〠Ā ⷫāDŽ⭡Ҿ㓯 㖞 Ⲵ ㌫ˈ ⷫ䟽㾱䀓 Ⲵ䰞仈 㜭 亪 䙊䗷 Ӕ Ⲵ䎋䚃DŽ 㓯 Ӕ ⧠ Ⲵ ˈ䘉ṧ ⷫ 䈤 ањѕ䟽Ⲵ DŽ ㇑㓿䗷 ⨶ѻ 䖖㜭 亪 䙊䗷 Ӕ 䐟 ˈն 䚯 Պ 䇨 DŽ䘉ṧ 䖖っ ˈҏ 㹼䘋䙏 а л䱽DŽ㘼 ⷫ а Ⲵ ⷫˈ ㇑䶎 ˈն ∄⋑ ⷫ㾱 DŽ Ӕ Ѿн DŽ 㺑 ˈӾ 䖖Ⲵっ 㘳㲁ˈ䘹 Ҷ ⷫⲴ ṸDŽ㔬к 䘠ˈ ⷫ Ր ⽪˖3.3.2 ⷫ Րϝゴ⹀ӊ䆒䅵3.3䌯䘧Ẕ⌟3.3.1Ӵ ⱘ䗝Ӵ Ⳍ Ѣ 㛑䔺㋏㒳ⱘⴐˈӴ ⱘ䗝 䔺䆒䅵ⱘ 䬂DŽḍ ↨䌯 㽕∖ˈ⬉⺕㒘ゲ䌯ˈ䳔㽕䗝 䆒䅵ⱘ 㛑䔺㛑 Ẕ⌟ 䘧䏃Ё 㒓ϟ⬉㒓Ё 20KHz Ѹ ⬉⌕ѻ⫳ⱘ⺕ 䔺⊓ⴔ䘧䏃㸠偊DŽ㒣䖛䅵ㅫ 䌯䘧ѻ⫳ⱘ⬉⺕ ⱘ ԡ䞣Ў10-7GSˈ䳔㽕䗝 䗖 䔺ゲ䌯ⱘẔ⌟ ⊩ˈ䰸њẔ⌟⺕ ⱘ㊒ П ˈ䖬䳔㽕 ѢẔ⌟⺕ ⱘӴ ⱘ乥⥛ ǃ ǃӋḐǃ 㗫ҹ ⦄ⱘ䲒 䖯㸠㗗㰥DŽ㒣䖛 ↨ˈ 㒜 Ӏ䗝 㒓 Ӵ Ў Ӏⱘ⺕Ӵ ˈ㒓 Ӵ ⧚ㅔ ǃӋḐ ǃԧ⿃ ˄Ⳍ ˅ǃ乥⥛ ǃ⬉䏃 ⦄ㅔ ㄝ⡍⚍DŽ 3.5Ў ⫼ⱘ 㒓 DŽ㒓3.3.2 㒓 Ӵ ⧚ЎњҢ⬉ 㒓 ⬉ Ё㦋 䘧䏃ⱘ ˈ䳔㽕 㒓 䖍⺕ ⱘ DŽ䗮⬉ 㒓 ⱘ⺕ ϔϾⶶ䞣 ˈ ⱘ ⼎DŽ 䗮⬉Ⳉ 㒓ϸ䖍ⱘ オⳈ 㕂ϸϾ䕈㒓ⳌѦ Ⳉ ԡѢϢ 㒓Ⳍ Ⳉ 䴶 ⱘ㒓 ˈ ҹ ⺕ 䞣ⱘϸϾ Ⳉ 䞣ˈ䖯㗠 ҹ㦋 ⺕ ⱘ DŽѨ ⫳ 㛑䔺㒓 ⱘ ⬉⺕⬅Ѣ 㒓 ⱘ⺕ 䕗Ў ˈЎњ䅼䆎 ˈ Ӏҹϟ㑺 ˖ 䔺䔺ԧ ㋏Ёˈ Н 䔺 䖯ⱘ Ў<䕈ℷ ˈ乎ⴔ<䕈ⱘ 䖍Ў;䕈ⱘℷ ˈ=䕈 䔺ℷϞ ∈ 㒓 䕈㒓 㸠Ѣ=䕈ⱘ⬉ 㒓 ˈ Ⳉ㒓 䕈㒓 㸠Ѣ;䕈ⱘ㒓 ˈ䕈㒓 㸠Ѣ<䕈ⱘ㒓 ⱘ⬉ 䖰 ѢϞ䗄ϸ㉏㒓 %; 䕑⌕ 㒓 䖍ⱘ⬉⺕ ˈ%= 䕑⌕ ℷϞ ⱘ⬉⺕ DŽ ✊ˈ Ⳉ㒓 ⱘ %; ⥛ˈ∈ 㒓 ⱘ %=ⱘ ⥛DŽⳈ䘧䰘䖥ⱘ⺕ ˈ ҹ䖥ԐЎ 䰤䭓ⱘⳈ 㒓Ϟⱘ⺕ ˈ 㒓Ёⱘ⬉⌕ ϔ 㾘 ˈ 㒓 ⱘ⺕ г ⫳ ˈ 㒓 Ё ϔ ⱘ⬉ DŽḍ ⊩ ˈ㒓 ⺕ Ӵ ⱘ 䚼 ⬉ ( Ϣ⺕ % W ǃ⬉⺕㒓 ⱘ 1 ǃ 䴶⿃$ⱘ ㋏ ˖02I B rP S ˄ ˅䖯㗠 ҹ ˖ϝゴ ⹀ӊ䆒䅵0x 22I h B 2x h P Su ˄ ˅ 022z I 2x B x hP S u ˄ ˅ ЁK ⬉ 㒓 䎱⾏ 䴶ⱘ Ⳉ䎱⾏DŽЎњ䅼䆎ⱘ ˈ䆄˖'x 2h B 2x h˄ ˅ '2z 2x B x h˄ ˅ B'X ǃB'Z BX ǃBZ Ⳍ ⱘ 䍟 DŽ⬅ ㋏ ⶹ˖(1)B'X x ⱘ ˈ Y 䕈ϸջ 䇗˗˄2˅B'Z x ⱘ ˈ Y 䕈ϸջ≵ 䇗 ㋏DŽ⬅ ㋏ ⶹ 㒓 Ẕ⌟ ⱘ ⬉ ϢӴ 㺙ⱘ催 h ǃ 㒓Ёⱘ⬉⌕ I Ӵ ⾏ 㒓ⱘ䎱⾏X ㋏ˈЎњ ԧⱘ ㋏ˈ Ӏ⫼MATLAB 䖭ѯ ㋏䖯㸠њӓⳳˈҹ 䖯㸠ㅫ⊩ⱘⷨおˈ⬅Ѣ↨䌯㾘 њ⬉⌕ Ӯ 100ma ⍂ ˈ䞛䲚 Ӏ ⬉⌕䇗 100ma ˈ 㑺⍂ 5ma DŽ 3.7 ⼎њ Ⳉ 㒓 Ẕ⌟ⱘ ⬉ V 催 h ⹂ Ϣ ⾏ 㒓䎱⾏X ⱘ ㋏ˈ⬅ 3.8 ҹ 㟈 Ⳉ 㒓 ⱘ ⡍ ˗ 3.8ЎMATLAB 䖯㸠ӓⳳⱘ䚼 ⑤ ˗ 3.9 ⼎њ催 h 30mm ǃ50mm ǃ80mm Ⳉ㒓 Ẕ⌟ ⱘ ⬉ ⱘ 䍟 DŽ㓐Ϟ ⶹˈ⫼ Ⳉ㒓 Ẕ⌟ ⱘ⬉ ҹ ⾏ 㒓ⱘԡ㕂ˈҢ㗠 䔺 ⾏Ё 㒓ⱘ䎱⾏ˈ䖯ϔℹ 䔺ⱘ䕀 DŽѨ ⫳ 㛑䔺Ⳉ 㒓 Ӵ ⬉ 9Ϣ;ⱘ ㋏0$7/$%ӓⳳ⑤ϝゴ⹀ӊ䆒䅵ϡ 催 Ⳉ 㒓 ⬉ 9Ϣ; ㋏3.3.3 㒓 ӴՓ⫼ 㒓 Ӵ ⦄ 㛑䔺ⱘ䏃 䆚 䰸њ㽕∖Փ⫼ⱘ 㒓 ⡍ ϔ㟈 ḍ 0$7/$% 㒓 Ӵ Ẕ⌟ ⱘ ⬉ 䖯㸠 ӓⳳ ⶹˈ⬅Ѣ㒓 Ӵ ⱘẔ⌟䎱⾏Ϣ㒓 ⱘ催 ǃ 㒓Ёⱘ⬉⌕ 㒓 Ӵ 䎱⾏ 㒓ⱘ䎱⾏ ˈ㒓 Ӵ Ӵ ⱘ 㺙 䗍 Ӯ 䴲 ⱘ [4]ˈ ⧚ⱘӴ ҹ 䕏ㅫ⊩ⱘ䋳 DŽ⬅Ѣ↨䌯 䞛⫼Ӵ 䞣ⱘ䰤 ˈ 㒜 䞛⫼12Ͼ 㒓 DŽ䆒䅵䞛⫼ ϔ ˈ 3.10 ⼎DŽҢ㗠 䆕㒉 ⱘϔ㟈 ˈՓ ㄪ⬹Џ㽕䲚Ё ῾䕈ϞDŽ Ѣ 䔺 ⱘ䏃 䆚 ⬉䏃 ԧ䭓 Ў240mmˈ⒵䎇 䔺 㽕∖DŽϔ 㒓 ӴѨ ⫳ 㛑䔺3.3.4 ㇻㅵӴ䅵 䍋 ⚍ϸ䖍 ϔϾ䭓 10cm咥㡆䅵 䍋 㒓ˈ䌯䔺 ッ䗮䖛䍋 㒓Ў↨䌯䅵 㗙㒧 DŽ 咥㡆䅵 䍋 㒓Ё䯈 㺙 ∌Й⺕䪕ˈ↣ϔ䖍 ϝ DŽ⺕䪕 ˖Ⳉ 7.5 - 15mmˈ催 1-3mmˈ㸼䴶⺕ 3000-5000GsDŽḍ ㇻㅵⱘ⡍ ˈ ⶹˈ⬉⺕㒘 ҹՓ⫼ ㇻㅵЎ䆚 䍋䎥㒓ⱘӴ DŽㇻㅵ ϔ⾡⺕ ⱘ⡍⅞ DŽ 䗮 ⬅ϸϾ ϝϾ ⺕ ⬉ ⱘㇻ⠛㾺⚍ˈ㹿 㺙 ⇨ԧ( ∂ǃ⇺ㄝ) ⳳぎⱘ⦏⩗ㅵ䞠ˈ⦏⩗ㅵ ㅵ 㸠 㺙ⱘㇻ⠛ッ䚼䞡 ˈ ⬭ ϔ 䯈䱭 ⳌѦ 㾺ҹ ⱘ 䯁 ⚍ˈ ㇻㅵ ⠽ 3.11 ⼎DŽ3.11 ㇻㅵ∌Й⺕䪕䴴䖥 ㇻㅵ ˈ 㗙⬅㒩 ㇻㅵϞ䴶ⱘ㒓 䗮⬉ ⺕ Փㇻ⠛⺕ ˈㇻ⠛ⱘ ⚍ Ӯ Ⳍ ⱘ⺕ DŽ⬅Ѣ⺕ Ⳍ 㗠ⳌѦ ˈ ⱘ⺕ 䍙䖛ㇻ⠛ⱘ ˈ ⱘ ⚍ Ӯ ; ⺕ ϔ ˈ ㇻ⠛ ⱘ⫼ϟ ⚍ ⢊ DŽ䖭ḋ њϔϾ ⱘ⫼ˈ ℸҙ䳔㽕ϔϾㅔ ⱘ ⬉䏃 ⦄䍋䎥㒓ⱘ䆚 DŽϔ㠀䅸Ўˈ ㇻㅵ ⱘ⺕ 䖒 䍙䖛ϔ ˈ 㾺⚍ (䯁 )ˈԚ 䰙 䴲 ℸˈ Ϣ ϡҙϢ ˈ䖬Ϣϸ ⱘ⺕ 㒓 ˈ Ӏ䗮䖛 ϡ ԡ㕂 ϡ ԡⱘ ㇻㅵ 䗖 ⱘ ㇻㅵ ԡ㕂DŽ。