通信数据报文解析1
modbus tcp通信报文解析

modbus tcp通信报文解析English answer:Modbus TCP is a widely used industrial protocol for communication between devices. It is based on the Modbus protocol, which was originally developed for serial communication, but has been adapted for use over TCP networks.Modbus TCP messages are encapsulated in TCP packets, and consist of a header and a payload. The header contains information about the message length, the transaction identifier, the protocol identifier, and the unit identifier. The payload contains the actual Modbus function code and data.The Modbus function code is a one-byte value that specifies the type of operation to be performed. There are many different function codes available, each with its own specific purpose. The most common function codes are:Read Coils (01): Reads the status of a range of coils.Read Discrete Inputs (02): Reads the status of a range of discrete inputs.Read Holding Registers (03): Reads the value of a range of holding registers.Read Input Registers (04): Reads the value of a range of input registers.Write Single Coil (05): Writes the status of a single coil.Write Single Register (06): Writes the value of a single holding register.Write Multiple Coils (15): Writes the status of a range of coils.Write Multiple Registers (16): Writes the value of arange of holding registers.The data in the payload varies depending on thefunction code. For example, the Read Coils function code requires the starting address and the number of coils to be read. The Write Single Register function code requires the address of the register to be written and the value to be written.Modbus TCP messages are typically sent and received using a client-server model. The client device initiates a connection to the server device and sends a Modbus TCP message. The server device processes the message and sends a response back to the client device.Modbus TCP is a versatile protocol that can be used for a wide variety of industrial applications. It is a reliable and efficient protocol that is easy to implement and use.中文回答:Modbus TCP是一种广泛用于设备间通信的工业协议。
101规约报文解析

101规约报文解析-CAL-FENGHAI.-(YICAI)-Company One1101规约(2002版)报文解析速查1、初始化主站发: 10 49 4F 98 16目的:给地址为4F的子站发请求链路状态命令。
子站回答:10 0B 4F 5A 16目的:子站向主站响应链路状态。
主站发: 10 40 4F 8F 16目的:给地址为4F的子站发复位通信单元命令。
子站回答:10 20 4F 6F 16目的: ACD位置1,表明子站向主站请求1级数据上送。
主站发: 10 7A 4F C9 16目的:向地址为4F的子站发召唤1级数据命令。
子站回答:68 09 09 68 28 4F 46 01 04 4F 00 00 00 11 16 (ASDU70,CON=28,COT=4)目的:子站以ASDU70(初始化结束)响应主站的召唤。
并ACD位置1,表明子站继续向主站请求1级数据上送。
后面跟随时间同步和总查询。
2、对时主站发:68 0F 0F 68 73 00 67 01 06 00 00 00 CD 85 36 0D 1E 0C 04 A4 16目的:给地址为0的子站发对时命令。
对时时间为:04年12月31日 13时54分34秒253毫秒长度长度(重复)控制域子站地址数据类型(ASDU方式)可变结构限定词传送原因毫秒(低)毫秒(高)分小时日月年子站发:68 0F 0F 68 80 00 67 01 07 00 00 00 F7 01 36 0D 1E 0C 04 58 16 目的:以ASDU67响应主站对时命令。
3、 总召唤 主站发:68 09 09 68 53 4F 64 01 06 4F 00 00 14 70 16 目的:向地址为4F 的子站发总召唤命令。
子站回答:10 20 4F 6F 16 目的:ACD 位置1,表明子站向主站请求1级数据上送。
主站发:10 5A 4F A9 16目的:向地址为4F 的子站发召唤1级数据的命令。
376-1报文解析

Q / GDW376.1—2009电力用户用电信息采集系统通信协议报文解析示例1.集中器登录主站注册帧报文//该帧为集中器发送给主站的登录注册帧登录: 68 32 00 32 00 68 C9 03 44 04 00 00 02 71 00 00 01 00 88 16解析:68 //帧起始符32 00 //数据长度2字节,数据类型排列顺序为低位在前高位在后,正序数值为0x0032,转换为二进制为0b0000000000110010,//最低d1~d0两位为协议类型,为0b10代表为376.1协议使用标志;//d15~d2为长度,为报文的用户数据区长度,对应的二进制值为0b1100,转换为十进制为12,即原始报文的红色部分32 00 //内容解释同上,使用2个长度表示长度确认比对68 //帧起始符C9 //控制域CD7 D6 D5 D4 D3~D0上行方向传输方向位DIR 启动标志位PRM 要求访问位ACD 保留功能码1 1 0 0 1001//d7:传输方向位DIR,d7位的数值为1,代表此帧报文是由终端发出的上行报文//d6:启动标志位PRM,d6位的数值为1,代表此帧报文来自启动站//d5:要求访问位,d5位的数值为0,ACD=1表示终端有重要事件等待访问,则附加信息域中带有事件计数器EC(EC见本部分4.3.4.6.3);ACD=0表示终端无事件数据等待访问。
//d4:保留//d3~d0:功能码,对应值为9,当启动标志位PRM=1时,代表该帧报文的帧类型为请求/响应帧,服务功能为链路测试,及使用于AFN=02的应用层功能码功能码帧类型服务功能0 —备用1 发送∕确认复位命令2~3 —备用4 发送∕无回答用户数据5~8 —备用9 请求∕响应帧链路测试10 请求∕响应帧请求1级数据11 请求∕响应帧请求2级数据12~15 —备用03 44 04 00 00 //地址域:地址域分为三部分,03 44|04 00|00//地址域数据格式字节数对应数值行政区划码A1 BCD 2 03 44终端地址A2 BIN 2 04 00主站地址和组地址标志A3 BIN 1 00//第一部分为行政区划码A1, 行政区划码按GB 2260—91的规定执行,数据格式为两字节BCD码-03 44,字节顺序为低位在前高位在后,实际数值应为4403//第二部分为终端地址A2,终端地址A2选址范围为1~65535。
wireshark代码解析1
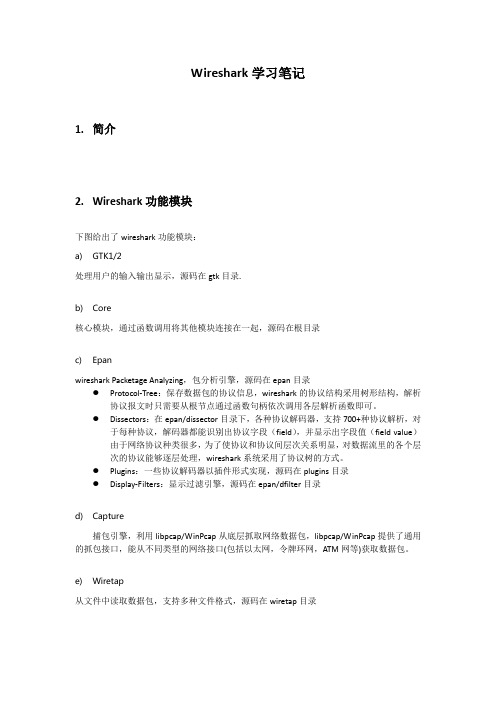
Wireshark学习笔记1.简介2.Wireshark功能模块下图给出了wireshark功能模块:a)GTK1/2处理用户的输入输出显示,源码在gtk目录.b)Core核心模块,通过函数调用将其他模块连接在一起,源码在根目录c)Epanwireshark Packetage Analyzing,包分析引擎,源码在epan目录●Protocol-Tree:保存数据包的协议信息,wireshark的协议结构采用树形结构,解析协议报文时只需要从根节点通过函数句柄依次调用各层解析函数即可。
●Dissectors:在epan/dissector目录下,各种协议解码器,支持700+种协议解析,对于每种协议,解码器都能识别出协议字段(field),并显示出字段值(field value)由于网络协议种类很多,为了使协议和协议间层次关系明显,对数据流里的各个层次的协议能够逐层处理,wireshark系统采用了协议树的方式。
●Plugins:一些协议解码器以插件形式实现,源码在plugins目录●Display-Filters:显示过滤引擎,源码在epan/dfilter目录d)Capture捕包引擎,利用libpcap/WinPcap从底层抓取网络数据包,libpcap/WinPcap提供了通用的抓包接口,能从不同类型的网络接口(包括以太网,令牌环网,ATM网等)获取数据包。
e)Wiretap从文件中读取数据包,支持多种文件格式,源码在wiretap目录f)Win-/libpcapWireshark抓包时依赖的库文件wireshark功能模块3.wireshark流程分析1)初始化Wireshark的初始化包括一些全局变量的初始化、协议分析引擎的初始化和Gtk相关初始化,显示Ethereal主窗口,等待用户进一步操作。
重点就是Epan模块的初始化。
Epan初始化:⏹tvbuff初始化:全局变量tvbuff_mem_chunk指向用memchunk分配的固定大小的空闲内存块,每个内存块是tvbuff_t结构,从空闲内存块中取出后,用来保存原始数据包。
IEC101规约报文解析举例
IEC-101规约报文举例1. 子站上电第一次建立连接后,上送初始化结束帧2. 主站复位命令3. 完整的时钟同步过程3.1. 延时采集和延时发送3.2. 时钟同步4. 总召唤4.1. 站总召唤4.2. 分组召唤5. 遥控5.1. 主站下发单点遥控合选择并且执行的全过程5.2. 主站下发单点遥控分选择并且撤销的全过程6. 子站突发上送数据6.1. YXBW、SOE主站:10 5b 01 5c 16子站:10 29 01 2a 16主站:10 7a 01 7b 16子站:68 09 09 68 28 01 01 81 03 01 03 00 01 b3 16【突发单点遥信】主站:10 5a 01 5b 16子站:68 09 09 68 28 01 01 81 03 01 03 00 00 b2 16【突发单点遥信】主站:10 7a 01 7b 16子站:68 1a 1a 68 08 01 1e 02 03 01 03 00 01 fc 43 39 16 81 03 07 03 00 00 f1 4a 39 16 81 03 0762 16【突发单点时标单点CP56Time2a时标事件】主站:10 5b 01 5c 16子站:10 09 01 0a 16主站:10 5a 01 5b 16子站:68 09 09 68 28 01 01 81 03 01 08 00 00 b7 16【突发单点遥信】主站:10 7a 01 7b 16子站:68 0c 0c 68 08 01 02 01 03 01 08 00 01 97 32 04 e6 16【突发带时标CP24单点遥信事件】主站:10 5b 01 5c 16子站:10 09 01 0a 166.2. 变化遥测主站:10 7b 01 7c 16子站:10 29 01 2a 16主站:10 5a 01 5b 16子站:68 0b 0b 68 28 01 09 81 03 01 08 40 00 01 00 00 16【突发规一化遥测】主站:10 7a 01 7b 16子站:68 0b 0b 68 08 01 09 81 03 01 08 40 00 00 00 00 df 16【突发规一化遥测】主站:10 5b 01 5c 16子站:10 09 01 0a 16。
[指南]iec104报文解析
![[指南]iec104报文解析](https://img.taocdn.com/s3/m/7abc9748f12d2af90242e68d.png)
[指南]iec104报文解析1.变化遥测报文举例:68 04 07 00 00 00子站响应帧报文68 04 0B 00 00 002.链路测试帧报文:68 04 43 00 00 00响应帧报文68 04 83 00 00 003.主站接收数据确认帧报文:68 04 01 00 5A 024(总召唤上送遥测报文举例:68 40 18 00 04 00 09 91 14 00 01 0B 70 40 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 F4 01 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 说明:0x09 ASDU 类型:遥测数据。
0x91 可变机构限定词:第七位定义该帧应用数据的数目,低位在前高位在后。
最高位为1,表示应用数据是信息体地址连续的一串数据,报文中只提供一个起始信息体地址,即第一个遥测的信息体地址,后面的遥测在此地址的基础上递增。
如上报文上送的是起始信息体地址为0x4070的17个遥测。
0x0014 传送原因:定义数据上送的原因,低位在前高位在后。
20为召唤上送,一般为响应总召唤。
0x004070 起始信息体地址:该帧第一个遥测信息体地址,其后信息体地址在此地址后依次递增。
0x0b01 公共地址:主站个子站设定的地址,低位在前高位在后。
由主站方确定,子站严格按此地址设定。
00 00 00 遥测实际上送数据:以下每3个字节一个遥测数据,信息体地址在起始地址上依次递增。
5(变化遥测报文举例:68 3A 00 00 00 00 09 08 03 00 01 0B 01 40 00 45 00 00 02 40 00 CD FF 00 03 40 00 32 00 00 04 40 00 0C 04 00 05 40 00 2C 00 00 06 40 00 0C 04 00 07 40 00 50 00 00 0F 40 00 88 13 00说明:0x09 ASDU类型:遥测数据。
61850典型报文解析说明
61850典型报文解析说明1 平台现利用ethereal报文抓捕工具抓取部分典型报文解析说明。
1.1报告类61850报告服务,是一项非常重要的ACSI服务,它通过SCSM映射为MMS协议中的InformationReport服务,我们在调试过程中通过捕包工具得到的61850报告报文,都是经过ASN.1编码后的InformationReport数据。
1.1.1InformationReport相关数据结构下表是InformationReport的数据结构:InformationReport的数据结构定义其中:RptID:作为不同报告间的唯一标识符,在报文中是始终存在的。
OptFlds:决定了报文拼装中可选成员出现与否,该属性值对于报文解析非常重要,在61850-7-2中BRCB.OptFlds和URCB.OptFlds定义不同,在标准-8-1中通过引入保留位,保证了OptFlds定义的一致性,整合后的OptFlds各位含义如下:OptFlds数据定义ResonCode(DataChange)、数据更新(DataUpdata)、品质变化(QualityChange)、完整性周期(IntegerPd)和总召唤(GI)。
ResonCode也是Bitstring类型,× × × × × × × ×待扩展GIIntgPdDdupQchgDchg保留触发选项的存储形式1.1.2 InformationReport报文解析建好数据库,连接好装置后,启动SCADA服务器,并用ethereal抓报文,根据报告格式进行解析。
图1为ethereal解析出来的报文。
解释如下:1、报告的RptID为BR04_brcbRelayDin03,其中03为报告实例号2、报告的选项域,报告中包含哪些选项,按位标识,0为不存在,1为存在。
3、顺序编号SeqNum,由OptFlds决定其是否存在4、溢出标志BufOvfl,由OptFlds决定其是否存在5、入口标识EntryID,由OptFlds决定其是否存在6、InclusionBitstring(该报告中出现的数据集成员),由报文可知该数据集共有137个成员,其中只有第29个数据集成员上送报告7、数据集成员Value,数据集成员值为一个结构8、value的stval(状态值)9、value的q(品质)10、value的t(时标)11、报告的触发原因类型为:数据变化(按位为保留、数据变化、品质变化、数据更新、完整性、总召唤,0为无1为有)图1 InformationReport1.2定值类定值服务可以分为SGCB控制块相关服务和定值相关服务。
CANOE基本操作_报文分析
CANoe基础功能及操作介绍黎先辉20200610目录1.概要 (3)2.工程建立 (3)2.1.CANoe功能概述 (3)3.工程配置 (4)3.1.硬件连接 (4)3.2.通道配置 (5)3.2.1.通道数量配置 (5)3.2.2.通道匹配 (6)3.3.加载DBC文件 (7)4.报文监测及分析 (8)4.1.数据来源设置 (8)4.2.CAN Statistics窗口 (9)4.3.Trace窗口 (9)4.4.Graphics窗口 (10)4.4.1.添加信号 (11)4.4.2.常用工具 (11)4.4.3.信号配置 (12)4.5.Logging窗口 (14)4.5.1.分包存储配置 (14)4.5.2.长报文回放 (15)1.概要CANoe是Vector公司的针对汽车电子行业开发的专用工具,主要用于总线开发及测试、ECU开发及测试、报文分析及诊断等方面,贯穿从需求分析到系统实现的完整开发过程。
CANoe丰富的功能和配置选项被OEM和供应商的网络设计工程师、开发工程师和测试工程师所广泛使用。
2.工程建立首次打开软件需要建立一个CANoe工程,File→New→Default,弹出图2.1模板选择窗口,工程模版库中有很多模板,可根据自己的需求选择最相近的一个模板,也可以把自己习惯使用的模块保存为自定义模板,下图中的CanOffLine_Li模板就是我新建的,还可以在右下角添加描述,后续新建工程时可以直接选用。
CANoe的工程文件包含两个文件,建议单独建立文件夹,针对需要多次打开使用的工程,建议另存工程,可以避免重复配置或数据回放。
图2.1CANoe工程模板选择窗口2.1.CANoe功能概述CANoe功能很比较多,汽车电子常用到的功能基本都有,包括CAN报文分析、虚拟节点、测试、诊断等功能,详见图2.2。
(1)CAN报文分析包括离线报文分析和在线报文分析;(2)虚拟节点可模拟部线节点周期性发送报文,可用于实车调试、台架调试或负载测试;(3)CANoe有较强大的测试功能,可以支持各类ECU测试;(4)支持UDS协议,通过导入.cdd文件,实现对ECU进行诊断或刷写。
电表报文解析
该通信规约适用于本地系统中多功能表的费率装置与手持单元(HHU)或其它数据终端设备进行点对点的或一主多从的数据交换方式,规定了它们之间的物理连接、通信链路及应用技术规范。
该协议在做“电力监控”、“水监控”等“工控领域”,具有广泛的应用。
协议具体内容可以从网上Google,下面主要介绍下协议的解析方法。
DL645协议需要先发送“前导字节”,用来唤醒从站,当然有些设备是不需要这样唤醒的。
在发送帧信息之前,先发送1-4个字节FEH,以唤醒接收方("FEH",H表示16进制,是一个字节), “前导字节” + “取数据报文”=“整体报文”。
首先我们先整体了解一个发送报文“68 12 34 56 78 90 12 68 01 02 43 C3 cs 16”在这之前呢,先看一下BCD码。
BCD码:二进制编码的十进制代码。
比如:0=00001=00012=00103=00114=01005=01016=01107=01118=10009=1001BCD码:ASCII表示(都是字符)BCD码都是由0~9,10个字符构成。
也就是说,BCD码一个字节是两位,一位是0~9,一个字节能够表示00~99。
BCD码1位是2进制的4位。
按16进制表示,没有ABCDEF。
帧格式(DL/T645-1997通讯规约标准文档中)帧是传送信息的基本单元。
帧格式如图所示。
4.2.1 帧起始符68H:标识一帧信息的开始,其值为68H=01101000B。
4.2.2地址域A0∽A5:地址域由6个字节构成,每字节2位BCD码。
地址长度为12位十进制数,可以为表号、资产号、用户号、设备号等。
具体使用可由用户自行决定。
当使用的地址码长度不足6字节时,用十六进制AAH补足6字节。
低地址位在先,高地址位在后。
当地址为999999999999H时,为广播地址。
4.2.3 控制码C:控制码的格式如下所示。
功能码后续帧标志从站异常标志传送方向D7=0:由主站发出的命令帧D7=1:由从站发出的应答帧D6=0:从站正确应答D6=1:从站对异常信息的应答D5=0:无后续数据帧D5=1:有后续数据帧D4∽D0:请求及应答功能码00000:保留00001:读数据00010:读后续数据00011:重读数据00100:写数据01000:广播校时01010:写设备地址01100:更改通信速率01111:修改密码10000:最大需量清零4.2.4 数据长度L:L为数据域的字节数。
485通信讲解(附案例)
帧头 帧头:一个字节 帧头是主机发布命令或从机回应主机响应的第一个字节,不论是主机还是从 机,都在收到该字节后开始记录有效数据。 为确保能准确识别报文头,要求两个通信帧之间保持2个字节传输时间以上的总 线空闲时间。
数据帧格式示意图
起始字节 (字节)
从机地址 (字节)
用户数据
异或校验 (字节)
76543210
速度
0
未到达设定频率
/速度
RS485通讯协议
响应字位定义
控制字 (位)
值
bit11
1
含义 变频器运行状态
功能描述
0
变频器停止状态
bit15
1
变频器接受出错
0
变频器接收正确 本位表示来自控制器的通讯帧经
校验出错,控制器应再次发送该
bit0
预留
帧。
bit7~8
预留
bit12~1 4,
预留
RS485通讯协议
1、以50Hz运行2#变频器。(此例需要将变频器频率设定成F0.03=6)
功能码号 功能码组号 命 令 /响 应 字 ( 码 )
RS485通讯协议
命令字(码)
命令字(码)
功能描述
0 无任务 1 请求读取功能码参数数据
2 请求更改功能码参数数据 14 请求更改功能码参数并存储至EEPROM
3~13,15 预留
响应字(码)
响应字(码)
内容描述
0 无响应
1 功能码参数操作正确(读取或更改)
先发高字节,再发低字节的原则
数据帧格式示意图
起始字节 (字节)
从机地址 (字节)
功能码操作 命 令 /响 应 (字节)
功能码号 (字节)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
+220V
就地
远方
远方位置 置检修态
调度远方遥控
开
关
遥合/可检同期
或
调
档
机பைடு நூலகம்
遥分
构
遥控选择
遥控返校
远
动
遥控执行
机
通讯状态
分闸!
遥控选择
调
遥控返校
度
主
遥控执行
站
5.7 遥控过程报文帧
101遥控报文解析1
11主站→68 0F 0F 68 73 01 67 01 06 01 00 00 FA 27 05 0A 11 02 05 2B 16 ;主站下传对时命令。秒和毫秒的计算--FA 27 (10234):毫秒=234;秒=10;分钟=05;小时=0A(10时);日 =11(17日);月=02;年05=2000+5=2005年。 子站←68 0F 0F 68 80 01 67 01 07 01 00 00 FA 27 05 0A 11 02 05 39 16 ;有的子站用E5确认。 12主站→10 5B 01 5C 16 ;主站召唤2级数据。 子站←E5 ;无请求的数据。背景扫描及分组召唤周期未到,子站没有事 件变位发生。 13主站→68 09 09 68 73 01 2E 01 06 01 01 61 81 8D 16 ;主站下 达双点遥控选择命令,根据发送接收信息表,地址6101对应B线开关, 信息体81代表选择控开。 子站←10 A0 01 A1 16 ;保持链路通畅,子站进行遥控选择判断。
104遥测报文实例报文解析1
2.遥测变化量报文 68 04 43 00 00 00 接收报文: 68 04 83 00 00 00 接收报文: 68 04 83 00 00 00 发送报文: 68 04 43 00 00 00 接收报文: 68 04 83 00 00 00 发送报文: 68 1e 00 00 00 00 15 04 03 00 02 00 01 07 00 40 06 02 07 00 40 06 03 07 00 80 0c 04 07 00 80 0c 接收报文: 68 04 83 00 00 00 发送报文: 68 04 43 00 00 00
《细则》规定,在总召中遥测量(2级)以1级数据的方 式返回,可能会给RTU方造成一定困难,需要单独为总召命令设 计一个函数。
101遥测报文实例解析2
9主站→10 7A 01 7B 16 ; 子站←68 09 09 68 88 01 64 01 0A 01 00 00 14 F9 16 ;总召唤结 束,下面将进入循环、背景扫描、分组召唤数据的正常传输过程中。 10主站→10 5B 01 5C 16 ;主站召唤2级数据。 子站←68 0E 0E 68 88 01 09 02 01 01 02 40 50 08 00 04 40 D3 7A C2 16 ;根据发送接收信息表,4002-(首地址)4001+1=(本报 文第一个信息体的顺序地址)2,即为B线无功,其码值为0850=二进制 0000 1000 0101 0000(十进制2128)。归一化值转换成十进制方法 是:最高位为符号位,第2位*2-1+第3位*2-2+…+第16位*2-15。由 此得出B线无功归一化值(1*2-4+1*2-9+1*2-11)=0.06494:由于 工程量最大值为12.47MW(同有功,它对应归一化满值1),转换后的 实际值为:0.06494*12.47= 0.81Mvar。相对比,十进制计算方法为 2128*12.47/ 32767=0.81Mvar,二进制计算方法与十进制计算方法 是相同的,后者更人性化一些。同理,4004对应B线A相电压,码值为 7AD3=十进制31443,工程量最大值为1.1*10000=11kV,转换后的 实际值为:31443*11/32767=10.56kV。传送原因COT=01是周期 循环数据标识,说明数据正常循环传输开始。
104遥测报文实例报文解析2
68 04 43 00 00 00 接收报文: 68 04 83 00 00 00 发送报文: 68 04 43 00 00 00 发送报文: 68 22 0a 00 04 00 0d 03 03 00 02 00 01 07 00 9a 99 19 40 00 02 07 00 9a 99 99 3f 00 03 07 00 cc cc 4c 3f 00 接收报文: 68 04 83 00 00 00 发送报文: 68 04 43 00 00 00 接收报文: 68 04 83 00 00 00
遥测信号的表示方法
遥测信号的ASDU
101遥测报文实例解析1
8主站→10 5A 01 5B 16 ; 子站←68 17 17 68 A8 01 09 85 14 01 01 40 5c 4A 00 F0 08 00 58 4B 00 03 7B 00 00 40 00 8C 16 ;返回遥测值 (控制字09)。信息体5个,公用起始地址4001,每个信息体共 3个字节,前两个字节为遥测值(低前高后传送,高字节首位是 符号位),第三个字节为品质描述(正常00、溢出01、被替换 20、无效80,也要求RTU执行101规约标准)。根据信息表的接 收发送顺序B线有功码值为4a5c=十进制19036,由于报文的正 满码值为215-1=16*1024=32767(归一化值0.99999…,可 视为1),对应工程量最大值=1.2*1.732* 10000*600=12.47MW(放大系数1.2),所以转换后的实际 值为:19036*12.47/32767= 7.244MW。其它遥侧量以十进 制方式进行计算的方法相同。
101遥控报文解析2
14主站→10 5A 01 5B 16 ; 子站←68 09 09 68 88 01 2E 01 07 01 01 61 81 A3 16 ;选择命令 确认。 15主站→10 7B 01 7C 16 ;主站召唤2级数据。遥控过程中数据刷新不 能停止。 子站←68 0B 0B 68 88 01 09 01 02 01 05 40 00 4C 00 27 16 ;传 送原因02是背景扫描数据标识,它的传送周期较长10分钟。地址40054001+1=5对应主变油温,其工程量最大值100,码值4C00=十进制 19456,实际值=19456*100/32767=59.38度。 16主站→68 09 09 68 53 01 2E 01 06 01 01 61 01 ED 16 ;主站下 达B线开关控开执行命令。信息体01表示执行。 子站←10 A0 01 A1 16 ;子站进行遥控执行准备。 17主站→10 7A 01 7B 16 ; 子站←68 09 09 68 88 01 2E 01 07 01 01 61 01 22 16 ;执行命令 确认。