目标检测方法简要综述
《2024年特殊天气条件下的目标检测方法综述》范文

《特殊天气条件下的目标检测方法综述》篇一一、引言随着现代科技的发展,目标检测技术在各个领域得到了广泛应用,特别是在复杂多变的天气条件下。
特殊天气条件如雾、雨、雪、霾等会对目标检测的准确性和稳定性造成影响。
本文将就特殊天气条件下的目标检测方法进行综述,介绍目前主要的检测技术和策略,以及这些技术所面临的挑战与未来发展。
二、特殊天气条件下的目标检测技术1. 雾天目标检测雾天由于能见度低,导致图像中的目标信息模糊。
针对这种情况,研究人员通过引入深度学习的方法,训练出能够处理低能见度图像的模型。
同时,结合图像增强的技术,如去雾算法和图像对比度增强,以提高图像的清晰度,从而提高目标检测的准确性。
2. 雨天目标检测雨天由于雨滴对摄像头的遮挡和反射,导致图像中目标的边缘模糊。
针对这一问题,研究者采用基于特征融合的方法,将雨滴造成的模糊特征与目标特征进行融合,以提高检测的准确性。
此外,利用深度学习模型对雨滴造成的噪声进行学习,并设计相应的去噪算法也是有效的手段。
3. 雪天和霾天目标检测雪天和霾天由于大气中颗粒物较多,导致图像中的目标信息被遮挡或模糊。
针对这种情况,研究者采用基于多尺度特征融合的方法,通过提取不同尺度的特征信息,从而更加准确地定位目标位置。
同时,深度学习的方法也被广泛用于这些场景下的目标检测,以提高目标的可见度和辨识度。
三、挑战与未来发展趋势特殊天气条件下的目标检测仍面临许多挑战。
如复杂环境下的目标识别准确度问题、图像质量的改善、噪声抑制等。
未来发展方向将集中在以下几个方面:1. 深度学习与多模态信息融合:随着深度学习技术的不断发展,利用多模态信息融合技术来提高特殊天气条件下的目标检测准确率将是一个重要的发展方向。
通过结合多种传感器信息,如雷达、激光等,提高目标的辨识度和定位精度。
2. 图像增强与去噪技术:针对特殊天气条件下的图像质量下降问题,研究更加先进的图像增强和去噪技术是关键。
通过改进算法和优化模型参数,提高图像的清晰度和对比度,从而提升目标检测的准确性。
目标检测综述
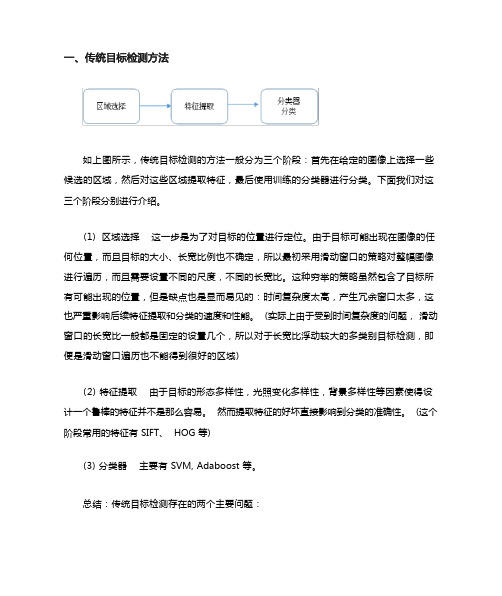
如上图所示,传统目标检测的方法一般分为三个阶段:首先在给定的图像上选择一些候选的区域,然后对这些区域提取特征,最后使用训练的分类器进行分类。
下面我们对这三个阶段分别进行介绍。
(1) 区域选择这一步是为了对目标的位置进行定位。
由于目标可能出现在图像的任何位置,而且目标的大小、长宽比例也不确定,所以最初采用滑动窗口的策略对整幅图像进行遍历,而且需要设置不同的尺度,不同的长宽比。
这种穷举的策略虽然包含了目标所有可能出现的位置,但是缺点也是显而易见的:时间复杂度太高,产生冗余窗口太多,这也严重影响后续特征提取和分类的速度和性能。
(实际上由于受到时间复杂度的问题,滑动窗口的长宽比一般都是固定的设置几个,所以对于长宽比浮动较大的多类别目标检测,即便是滑动窗口遍历也不能得到很好的区域)(2) 特征提取由于目标的形态多样性,光照变化多样性,背景多样性等因素使得设计一个鲁棒的特征并不是那么容易。
然而提取特征的好坏直接影响到分类的准确性。
(这个阶段常用的特征有 SIFT、 HOG 等)(3) 分类器主要有 SVM, Adaboost 等。
总结:传统目标检测存在的两个主要问题:一是基于滑动窗口的区域选择策略没有针对性,时间复杂度高,窗口冗余;二是手工设计的特征对于多样性的变化并没有很好的鲁棒性。
对于传统目标检测任务存在的两个主要问题,我们该如何解决呢?对于滑动窗口存在的问题, region proposal 提供了很好的解决方案。
region proposal (候选区域) 是预先找出图中目标可能出现的位置。
但由于 regionproposal 利用了图像中的纹理、边缘、颜色等信息,可以保证在选取较少窗口(几千个甚至几百个) 的情况下保持较高的召回率。
这大大降低了后续操作的时间复杂度,并且获取的候选窗口要比滑动窗口的质量更高(滑动窗口固定长宽比) 。
比较常用的 region proposal 算法有selective Search 和 edge Boxes ,如果想具体了解 region proposal 可以看一下PAMI2015 的“What makes for effective detection proposals?”有了候选区域,剩下的工作实际就是对候选区域进行图像分类的工作 (特征提取 +分类)。
《2024年特殊天气条件下的目标检测方法综述》范文

《特殊天气条件下的目标检测方法综述》篇一一、引言随着计算机视觉技术的快速发展,目标检测技术在多种场景下都取得了显著的成果。
然而,在特殊天气条件下,如雾天、雨天、雪天等,目标的检测往往面临极大的挑战。
本文旨在全面综述特殊天气条件下的目标检测方法,分析其技术特点及适用性,以期为未来的研究提供有益的参考。
二、雾天目标检测在雾天环境中,由于大气中悬浮微粒的散射作用,图像的对比度和清晰度都会降低,从而增加了目标检测的难度。
针对这一问题,研究者们提出了多种方法。
其中,基于深度学习的去雾技术与目标检测技术相结合的方法成为研究热点。
通过深度学习模型对雾天图像进行去雾处理,提高图像质量,从而提升目标检测的准确率。
此外,还有一些方法通过构建雾天特定场景下的目标检测模型,提高对雾天环境的适应性。
三、雨天目标检测雨天环境下,雨水会在摄像头镜头上形成水珠或水雾,导致图像模糊、失真。
针对这一问题,研究者们提出了基于雨滴模型的目标检测方法。
这种方法通过构建雨滴模型,模拟雨天环境下的图像变化,从而对目标进行准确检测。
此外,还有一些方法通过改进目标检测算法的鲁棒性,使其在雨天环境下仍能保持良好的性能。
四、雪天目标检测雪天环境下,由于雪花的遮挡和反射作用,图像的对比度和亮度都会发生变化,给目标检测带来困难。
针对雪天环境,研究者们提出了基于颜色和纹理特征的目标检测方法。
这些方法通过提取目标的颜色和纹理特征,在雪天环境下仍能实现较为准确的目标准确率。
同时,还有一些方法通过改进算法的适应性,使其在雪天环境下具有更好的性能。
五、技术特点及适用性分析特殊天气条件下的目标检测方法具有以下技术特点:一是需要结合特殊天气环境的特点进行模型构建和算法优化;二是需要提高算法的鲁棒性,以适应不同天气环境下的变化;三是需要充分利用目标的颜色、纹理等特征信息进行准确检测。
在适用性方面,不同方法适用于不同的特殊天气环境和场景。
因此,在实际应用中,需要根据具体场景和需求选择合适的目标检测方法。
《2024年特殊天气条件下的目标检测方法综述》范文

《特殊天气条件下的目标检测方法综述》篇一一、引言随着科技的不断进步,目标检测技术在众多领域中得到了广泛应用,如自动驾驶、安防监控、无人机航拍等。
然而,在特殊天气条件下,如雨雪、雾霾、强光等,目标检测的准确性和稳定性往往面临巨大的挑战。
本文旨在综述特殊天气条件下的目标检测方法,分析其发展现状与未来趋势。
二、特殊天气条件下的目标检测技术概述特殊天气条件下的目标检测主要涉及到在恶劣环境因素影响下,通过图像处理和机器学习等技术手段,实现对目标的准确识别和定位。
这些技术主要包括基于传统图像处理的方法、基于深度学习的方法以及融合多种技术的混合方法。
(一)基于传统图像处理的方法传统图像处理方法主要依赖于图像的色彩、纹理、边缘等特征进行目标检测。
在特殊天气条件下,这些方法可能需要对图像进行预处理或增强,以改善图像质量,提高目标检测的准确性。
(二)基于深度学习的方法深度学习在目标检测领域取得了显著的成果。
基于深度学习的目标检测方法主要包括卷积神经网络(CNN)和循环神经网络(RNN)等。
这些方法能够自动提取图像中的特征,实现端到端的检测,具有较强的鲁棒性。
在特殊天气条件下,深度学习方法能够通过学习大量数据中的特征信息,提高目标检测的准确性。
(三)混合方法混合方法主要结合了传统图像处理和深度学习的优点,针对特定问题设计出具有针对性的解决方案。
这种方法能够充分利用各种技术的优势,提高目标检测的准确性和稳定性。
三、特殊天气条件下的目标检测技术分析(一)雨雪天气下的目标检测雨雪天气对目标检测的挑战主要在于图像的模糊和遮挡。
针对这一问题,可以采用去噪、增强等图像预处理方法改善图像质量。
同时,结合深度学习技术,可以自动提取出目标特征,实现准确的目标检测。
(二)雾霾天气下的目标检测雾霾天气下,能见度低、对比度差是主要的挑战。
可以通过优化图像滤波和色彩校正等方法提高图像质量。
此外,利用深度学习技术对特征进行自动提取和筛选,能够进一步提高目标检测的准确性。
《2024年基于深度学习的目标检测研究综述》范文

《基于深度学习的目标检测研究综述》篇一一、引言随着深度学习技术的快速发展,其在计算机视觉领域的应用逐渐增多。
目标检测作为计算机视觉的核心任务之一,近年来已经成为了深度学习领域研究的热点。
本文将对基于深度学习的目标检测的研究进行综述,探讨其研究进展、现有方法及挑战,并对未来研究方向进行展望。
二、目标检测概述目标检测是计算机视觉领域的一项重要任务,旨在从图像或视频中检测出特定类别的目标并实现定位。
目标检测广泛应用于无人驾驶、智能监控、智能安防等领域。
传统的目标检测方法主要依赖于特征提取和分类器设计,而基于深度学习的目标检测方法则通过深度神经网络实现特征学习和分类,具有更高的准确性和鲁棒性。
三、基于深度学习的目标检测方法3.1 基于区域的目标检测方法基于区域的目标检测方法将目标检测任务划分为多个子区域,对每个子区域进行分类和回归。
代表性的算法有R-CNN系列(R-CNN、Fast R-CNN、Faster R-CNN等),这些算法通过区域提议和卷积神经网络实现目标检测。
这些方法的优点是准确率高,但计算复杂度较高,实时性较差。
3.2 基于回归的目标检测方法基于回归的目标检测方法通过卷积神经网络直接实现目标的位置回归和类别分类。
代表性的算法有YOLO(You Only Look Once)系列和SSD(Single Shot MultiBox Detector)等。
这些算法具有较高的计算效率和实时性,适用于对速度要求较高的场景。
四、深度学习目标检测的挑战与研究方向4.1 挑战(1)小目标检测:在复杂场景中,小目标的检测难度较大,易受噪声和背景干扰的影响。
(2)实时性:对于需要实时处理的场景,如无人驾驶等,如何在保证准确性的同时提高实时性是一个挑战。
(3)跨领域应用:不同领域的数据集差异较大,如何实现跨领域应用是一个亟待解决的问题。
4.2 研究方向(1)模型优化:通过改进网络结构和算法优化,提高目标检测的准确性和实时性。
目标检测综述

目标检测综述
目标检测是图像处理中一个主要的任务,它是图像中任何兴趣目标的定位和辨识。
它主要用于识别比如行人、车辆或其他由照片或视频监控而来的图像。
目标检测通常需要预先检测和识别一组被认定为兴趣目标的像素,并根据一组由图像处理或机器学习技术估计出来的定位参数,调整识别模型以更好的检测目标。
深度学习技术是最近用于目标检测的最热门的方法。
深度学习的主要模型是卷积神经网络(CNNs),他们能够从图片关联、识别以及定位某一物体特定的实例。
物体实例通常在一定维度空间坐标中得以定位,以及采用标签来提取某类物体的语义分类,并在图片中给出它们的位置大小和特性。
其他几种类型的特征和算法也被用于实现目标检测,这些方法包括有传统的统计分类、基于扫描的方法、基于强化学习的算法以及随机森林算法等。
目标检测技术对图像分析非常重要,因为它可以能够让系统自动识别不断变化的目标。
它也可以帮助检测重要目标,以及更好的预测特定场景的行为。
目标检测 发展综述
目标检测发展综述1. 引言1.1 目标检测发展综述目标检测是计算机视觉领域的重要研究方向,其发展历程经历了多年的探索和进步。
通过对图像或视频中的目标进行检测和识别,目标检测技术可以广泛应用于人脸识别、智能监控、自动驾驶等领域。
随着深度学习和神经网络的兴起,目标检测技术取得了巨大进展,实现了更加准确和高效的目标检测效果。
在目标检测的历史背景中,传统的目标检测方法主要依赖于手工设计的特征和分类器,但存在着准确率不高和鲁棒性差的问题。
随着深度学习技术的发展,基于深度神经网络的目标检测方法取得了突破性进展,如Faster R-CNN、YOLO、SSD等。
这些方法在准确率和速度上都取得了显著的提升,成为目标检测领域的研究热点。
目标检测的应用领域非常广泛,涵盖了交通监控、智能安防、医疗图像分析等多个领域。
随着物联网、大数据等技术的快速发展,目标检测技术也在不断拓展新的应用场景。
目标检测仍面临着诸多挑战,如遮挡、姿态变化、光照变化等,未来需要不断优化算法和提升性能以应对挑战。
目标检测技术在计算机视觉领域发展迅速,具有重要的应用前景和社会意义。
随着深度学习技术的不断进步和应用,目标检测将在未来实现更广泛的应用和更高水平的精度,为人类社会带来更多便利和效益。
2. 正文2.1 目标检测的历史背景目标检测的历史背景可以追溯到上个世纪五六十年代,当时计算机视觉领域刚刚起步。
最早的目标检测方法是基于简单的特征匹配和模板匹配,如采用灰度直方图、颜色直方图等来检测目标。
随着计算机硬件性能的提升和图像处理算法的发展,目标检测技术不断演进。
在上世纪90年代初,神经网络技术的兴起推动了目标检测方法的进步。
研究者开始尝试将神经网络应用于目标检测中,比如LeCun等人提出的卷积神经网络(CNN),为目标检测技术的发展开辟了新的路径。
随后,随着深度学习方法的兴起,目标检测技术取得了巨大的突破。
像RCNN、Fast RCNN、Faster RCNN等基于深度学习的目标检测方法相继被提出,大大提高了目标检测的准确率和效率。
《2024年特殊天气条件下的目标检测方法综述》范文
《特殊天气条件下的目标检测方法综述》篇一一、引言随着科技的发展和智能化社会的到来,目标检测技术成为了众多领域不可或缺的技术之一。
在复杂多变的自然环境中,尤其是特殊天气条件下,目标检测技术的有效性和准确性成为了研究的关键。
本文将围绕特殊天气条件下的目标检测方法进行综述,分析现有技术及其应用领域,以期为相关研究提供参考和指导。
二、特殊天气条件概述特殊天气条件通常指风雨雪雾等恶劣环境,以及光线变化等非标准气象条件。
这些因素都会对目标检测的准确性和效率产生影响,因此,特殊天气条件下的目标检测技术具有较高的研究价值。
三、传统目标检测方法在特殊天气条件下,传统的目标检测方法主要依赖于图像处理技术和特征提取技术。
通过提取图像中的关键特征,如颜色、形状、纹理等,结合分类器进行目标识别。
然而,在特殊天气条件下,由于光照、雨雪等因素的影响,这些传统方法的准确性和稳定性往往受到挑战。
四、现代目标检测方法随着深度学习和人工智能技术的发展,现代目标检测方法主要基于卷积神经网络(CNN)等深度学习算法。
这些方法通过大量的训练数据学习目标的特征和规律,实现高精度的目标检测。
在特殊天气条件下,这些方法可以通过自适应的模型和算法优化来提高准确性和稳定性。
常见的现代目标检测方法包括YOLO (You Only Look Once)、Faster R-CNN等。
五、特殊天气条件下的目标检测方法针对特殊天气条件下的目标检测,研究者们提出了多种具有针对性的方法。
例如,针对雾天环境,可以采用基于深度学习的去雾算法来提高图像的清晰度;针对雨雪天气,可以通过动态阈值调整和特征选择来减少雨雪对目标检测的影响。
此外,还有基于光流法、基于雷达技术的目标检测方法等。
这些方法各有优缺点,可以根据实际需求进行选择和应用。
六、应用领域特殊天气条件下的目标检测技术在众多领域有着广泛的应用。
在智能交通系统中,可以用于车辆、行人等的实时检测和追踪;在安防监控领域,可以用于人脸识别、行为分析等;在军事领域,可以用于无人机侦查、目标跟踪等任务。
3d目标检测方法研究综述
3d目标检测方法研究综述目前,3D目标检测在计算机视觉领域中变得越来越流行,因为这个新兴的技术能够提供更加丰富和准确的场景理解。
3D目标检测涉及使用深度学习和传感器技术来精确地测量和捕捉物体的三维信息。
在本文中,我们将对3D目标检测方法进行研究综述。
针对3D目标检测,人们主要面临的挑战是如何从多个噪声来源中提取准确的3D信息。
由于传感器噪声和位置偏移等问题,导致深度信息的精确程度受限,从而使得物体的3D边界信息无法准确获取。
在过去的几年中,研究者们已经发展出了各种各样的3D目标检测算法来解决这些问题。
在传统计算机视觉领域中,物体检测通常基于基于视觉特征的方法,如Haar-like特征或HOG(方向梯度直方图)特征。
这些方法仅限于2D,无法准确捕捉物体的真实形状和空间位置。
人们开始研究基于3D数据的物体检测算法。
随着深度学习技术的发展,基于神经网络的3D目标检测方法开始流行。
最具代表性的是基于点云的3D目标检测方法,该方法首先将输入的点云数据转换为三维体素网格,然后对每个体素进行二进制分类或回归,以确定目标是否存在(分类)或其3D边界信息(回归)。
这个方法的优点是可以处理不同分辨率和密度的点云数据,而且能够准确捕捉目标的3D信息。
一些研究人员通过对体素大小进行优化,以实现更好的检测精度,但与此计算复杂度也会增加。
还有许多其他基于3D数据的物体检测方法,如多视角投影方法、基于图像和点云的方法等等。
多视角投影方法通过将不同视角的深度图像进行融合,以获取物体的3D信息。
基于图像和点云的方法则通过将2D图像和点云数据进行融合,以提供更加全面的场景理解。
3D目标检测在计算机视觉领域中是一个不断发展的领域,现有的方法有助于解决从多个噪声来源中提取准确的3D信息的问题。
随着技术的不断发展,我们相信将会有更多更高效的3D目标检测算法被提出并应用到实际场景中。
另一个挑战是如何在复杂的场景中对多个目标进行检测。
传统的2D图像和视频中存在遮挡和重叠等问题,这些问题在3D场景中更加突出。
深度学习目标检测方法综述
深度学习目标检测方法综述一、本文概述随着技术的快速发展,深度学习在诸多领域,特别是计算机视觉领域,展现出了强大的潜力和应用价值。
目标检测作为计算机视觉的核心任务之一,旨在识别图像或视频中所有感兴趣的目标,并为每个目标提供精确的边界框。
这一技术在自动驾驶、安全监控、智能零售等多个领域有着广泛的应用前景。
本文旨在对深度学习目标检测方法进行全面的综述,总结其发展历程、主要方法、性能评估以及未来趋势。
本文将回顾目标检测技术的历史演变,从早期的传统方法到基于深度学习的现代方法。
接着,重点介绍基于深度学习的目标检测算法,包括R-CNN系列、YOLO系列、SSD等主流方法,并详细分析它们的原理、优缺点及适用场景。
本文还将讨论目标检测任务中的关键挑战,如小目标检测、遮挡目标检测、多目标检测等,并探讨相应的解决策略。
在性能评估方面,本文将介绍常用的目标检测数据集和评价指标,如PASCAL VOC、COCO等,并对比不同方法在这些数据集上的表现。
本文将展望深度学习目标检测技术的未来发展方向,包括算法优化、模型轻量化、实时性能提升等方面,以期为相关领域的研究者和实践者提供参考和启示。
二、深度学习目标检测算法发展历程深度学习目标检测是计算机视觉领域的一个重要研究方向,它旨在通过深度学习技术自动识别和定位图像中的目标对象。
自2014年以来,深度学习目标检测算法经历了飞速的发展,从最初的R-CNN到现如今的YOLO、SSD等先进算法,不断刷新着目标检测的准确性和实时性。
早期,深度学习目标检测主要基于Region Proposal的方法,如R-CNN (Region-based Convolutional Neural Networks)系列算法。
R-CNN 通过选择性搜索(Selective Search)算法生成候选区域,然后对每个候选区域进行卷积神经网络(CNN)的特征提取和分类,实现了目标检测的初步突破。
然而,R-CNN存在计算量大、训练复杂等问题,后续研究在此基础上进行了一系列改进,如Fast R-CNN和Faster R-CNN。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目标检测方法简要综述
作者:栗佩康袁芳芳李航涛
来源:《科技风》2020年第18期
摘要:目标检测是计算机视觉领域中的重要问题,是人脸识别、车辆检测、路网提取等领域的理论基础。
随着深度学习的快速发展,与基于滑窗以手工提取特征做分类的传统目标检测算法相比,基于深度学习的目标检测算法无论在检测精度上还是在时间复杂度上都大大超过了传统算法,本文将简单介绍目标检测算法的发展历程。
关键词:目标检测;机器学习;深度神经网络
目标检测的目的可分为检测图像中感兴趣目标的位置和对感兴趣目标进行分类。
目标检测比低阶的分类任务复杂,同时也是高阶图像分割任的重要基础;目标检测也是人脸识别、车辆检测、路网检测等应用领域的理论基础。
传统的目标检测算法是基于滑窗遍历进行区域选择,然后使用HOG、SIFT等特征对滑窗内的图像块进行特征提取,最后使用SVM、AdaBoost等分类器对已提取特征进行分类。
手工构建特征较为复杂,检测精度提升有限,基于滑窗的算法计算复杂度较高,此类方法的发展停滞,本文不再展开。
近年来,基于深度学习的目标检测算法成为主流,分为两阶段和单阶段两类:两阶段算法先在图像中选取候选区域,然后对候选区域进行目标分类与位置精修;单阶段算法是基于全局做回归分类,直接产生目标物体的位置及类别。
单阶段算法更具实时性,但检测精度有损失,下面介绍这两类目标检测算法。
1 基于候选区域的两阶段目标检测方法
率先将深度学习引入目标检测的是Girshick[1]于2014年提出的区域卷积神经网络目标检测模型(R-CNN)。
首先使用区域选择性搜索算法在图像上提取约2000个候选区域,然后使用卷积神经网络对各候选区域进行特征提取,接着使用SVM对候选区域进行分类并利用NMS 回归目标位置。
与传统算法相比,R-CNN的检测精度有很大提升,但缺点是:由于全连接层的限制,输入CNN的图像为固定尺寸,且每个图像块输入CNN单独处理,无特征提取共享,重复计算;选择性搜索算法仍有冗余,耗费时间等。
基于R-CNN只能接受固定尺寸图像输入和无卷积特征共享,He[2]于2014年参考金字塔匹配理论在CNN中加入SPP-Net结构。
该结构复用第五卷积层的特征响应图,将任意尺寸的候选区域转为固定长度的特征向量,最后一个卷积层后接入的为SPP层。
该方法只对原图做一
次卷积,共享卷积层的计算过程,极大提高了速度。
SPP-Net的优点:不同尺度候选区域输入能够提高检测精度,共享不同候选区域SPP层前序的计算,提升检测效率。
Girshick[3]于2015年在R-CNN的基础上提出了Fast R-CNN,使用ROI(感兴趣区域)池化层代替SPP。
原图经过卷积后产生特征响应图,然后从每个ROI池化层中提取定长特征向量,每个特征向量输入到全连接层,分支两个输出层,一个是softmax分类器用来预测类别,另一个用作物体位置定位框回归预测。
除候选区域提取外该框架是一种端到端的基于多任务损失函数的一阶段训练过程,节省了存储空间,减少了训练及预测时间且提升了检测精度。
但候选区域提取仍沿用老算法,耗费时间,成为瓶颈。
基于Fast R-CNN中前序候选区域提取时仍使用区域选择性搜索算法成这点,Ren[4]提出Faster R-CNN模型,使用区域选择网络(RPN)来产生候选区域框,与检测网络共享卷积特征响应,大大减少了计算量,提高检测速度,这也使得Faster R-CNN成为第一个基于深度学习的端到端目标检测算法,在GPU上运行达到5fps的检测速率,具有一定的实时性。
但该模型也存在一些缺点,如RPN网络的训练较为耗时;RPN不擅于处理一些极端尺度及形状的目标物体检测。
此外还有R-FCN、FPN、Mask R-CNN等由以上算法衍生的更为优秀的两阶段目标检测算法,本文不再展开。
2 基于全局回归分类的单阶段目标检测方法
两阶段的目标检测算法,虽然检测精度指标较好,但即使实现端到端的Faster R-CNN,也无法满足实时性要求,因此单阶段目标检测算法旨在提升检测实时性。
2016年Redmon[5]提出了YOLO,图像经过一个神经网络即可完成目标位置及其所属类别的预测,检测速度达到
45fps,但检测精度不高。
后续Redmon[6]提出了YOLOv2,与YOLO相比卷积层后加入了批归一化、去掉全连接层进行多尺度训练、加入先验框等,使得能够检测种类更多、精度更高且时间更快。
2018年,Redmon[7]提出了YOLOv3,该框架使用新的网络结构Darknet-53,利用多尺度进行目标检测,使用逻辑回归代替softmax分类器,使检测精度较之前版本提高,且对小目标的检测效果比前述版本好。
最近,Bochkovskiy[8]提出了YOLOv4,加入SPP block来改善感受域大小,使用PANet代替FPN进行多通道特征融合,选用CSPDarknet53作为主干网络,使得检测精度与速度进一步提升。
此外还有SSD、FPN、RefineDet、RetinaNet、CornerNet等優秀的单阶段目标检测算法,本文不再展开。
3 结语
本文作为一篇目标检测方法的简要综述,首先介绍了该研究的背景与意义,后分为两阶段和单阶段的基于深度学习的目标检测方法进行介绍。
现阶段后者的实时性明显优于前者,检测精度也在不断提升,但前者在检测精度上仍有优势,检测效率也在不断优化,不同应用场景可分别尝试这两类算法进行对比和应用。
参考文献:
[1]R.Girshick et al.,“Rich feature hierarchies for accurate object detection and semantic segmentation,”in Proc.CVPR,2014,pp.580-587.
[2]K.He et al.,“Spatial pyramid pooling in deep convolutional networks for visual recognition,”IEEE TPAMI.,vol.37,no.9,pp.1904-1916,Sep.2015.
[3]R.Girshick,“Fast R-CNN,”in Proc.ICCV,2015,pp.1440-1448.
[4]S.Ren et al.,“Faster R-CNN:Towards real-time object detection with region proposal networks,”in Proc.NIPS,2015,pp.91-99.
[5]J.Redmon et al.,“You only look once:Unifified,real-time object detection,”in
Proc.CVPR,2016,pp.779-788.
[6]J.Redmon et al.,“YOLO9000:Better,faster,stronger,”in CVPR,2017,pp.7263-7271.
[7]J.Redmon et al.,“YOLOv3:An Incremental Improvement,”2018.
[8]A.Bochkovskiy et al.,“YOLOv4:Optimal speed and accuracy of Object Detection,”2020.。