Computer Vision计算机视觉英文ppt
合集下载
Class03computer vision 计算机视觉

(x,y,z) = k(x’,y’,z’)
2
Projective 3D Space
The projective space P3 is the set of equivalence classes of quadruplets of numbers (not all zero) where two quadruplets (x,y,z,w) and (x’,y’,z’,w’) are equivalent if and only if there is a real number k such that
(x,y,z,w) = k(x’,y’,z’,w’)
3
What happens if k=0?
k=0 can be used to represent points “at infinity”. All points at infinity in the 2D projective space lie on the line “at infinity”. Points at infinity are also called IMPROPER POINTS or IDEAL POINTS.
In projective space ALL lines intersect at a point. Some lines intersecne. We call these lines PARALLEL.
4
Duality Principle
Inverse exists
T1-1
state2
Inverse exists
T2-1
state3
state1
T1-1 * T2-1
closed under composition
计算机视觉课件2(英文版)

A 10,19,22,36,38,49,75,98,99
I0 medianA 38
18
Other nonlinear filters:
——minimum filter(remove salt noise):
I0 minA
——maximum filter (remove pepper noise)
——linear filter ——nonlinear filter
2
1. Linear system
(x x0, y y0 )
delta function
case:
Linear Space
h(x x0, y y0)
Invariant Systiemmpulse response
Continuous
——Cascading operation: x2 Let h1(x) h2(x)
e e d 222 (x22)2
e 2(
x2 2)2
If a Gaussian filter has a large parameter , it requires a large operation mask and thus, it will take long time to process.
To reduce windows boundary effect and for a smooth filterin g, filter elements are often weighted.
1 11 16 8 16
111
848
1 11
7
16 8 16
Mean Filter on Gaussian noise corrupted image
Computer-Vision计算机视觉英文ppt
At the same time, AI MIT laboratory has attracted many famous scholars from the world to participate in the research of machine vision,which included the theory of machine vision , algorithm and design of system .
Its mainstream research is divided into three stages:
Stage 1: Research on the visual basic method ,which take the model world as the main object;
Stage 2: Research on visual model ,which is based on the computational theory;
the other is to rebuild the three dimensional object according to the two-dimensional projection images .
History of computer vision
1950s: in this period , statistical pattern recognition is most applied in computer vision , it mainly focuse on the analysis and identification of two-dimensional image,such as: optical character recognition, the surface of the workpiece, the analysis and interpretation of the aerial image.
Its mainstream research is divided into three stages:
Stage 1: Research on the visual basic method ,which take the model world as the main object;
Stage 2: Research on visual model ,which is based on the computational theory;
the other is to rebuild the three dimensional object according to the two-dimensional projection images .
History of computer vision
1950s: in this period , statistical pattern recognition is most applied in computer vision , it mainly focuse on the analysis and identification of two-dimensional image,such as: optical character recognition, the surface of the workpiece, the analysis and interpretation of the aerial image.
computer vision ppt
Saturation:
Challenging for robotics
11
12
SCT Representations
(Spherical Coordinate Transform)
Color Representations
RGB
Currently being explored for robotics Designed to transform RGB data to a color space more closely duplicates the response of the human eye Used in biomedical imaging
19
A bar of chart of data Size of each bar is the number of data points whose value falls into the range for the bar, called bin (buckets) Constructing histogram
3
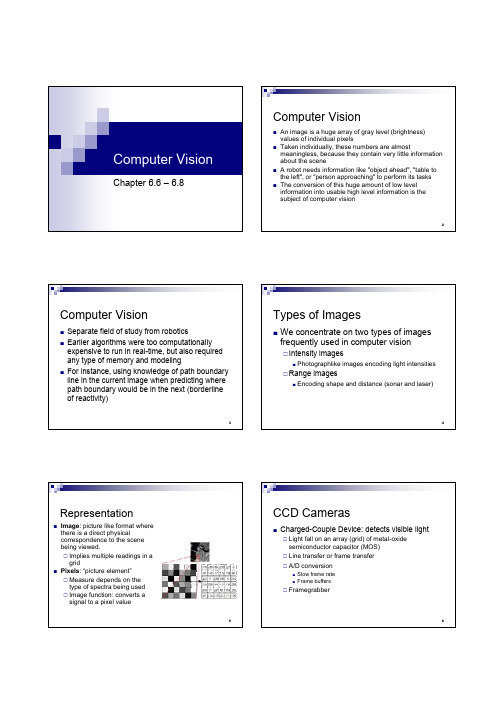
We concentrate on two types of images frequently used in computer vision
Intensity
images
Photographlike images encoding light intensities
Range
images
Computer Vision
Computer Vision
Chapter 6.6 – 6.8
An image is a huge array of gray level (brightness) values of individual pixels Taken individually, these numbers are almost meaningless, because they contain very little information about the scene A robot needs information like "object ahead", "table to the left", or "person approaching" to perform its tasks The conversion of this huge amount of low level information into usable high level information is the subject of computer vision
Challenging for robotics
11
12
SCT Representations
(Spherical Coordinate Transform)
Color Representations
RGB
Currently being explored for robotics Designed to transform RGB data to a color space more closely duplicates the response of the human eye Used in biomedical imaging
19
A bar of chart of data Size of each bar is the number of data points whose value falls into the range for the bar, called bin (buckets) Constructing histogram
3
We concentrate on two types of images frequently used in computer vision
Intensity
images
Photographlike images encoding light intensities
Range
images
Computer Vision
Computer Vision
Chapter 6.6 – 6.8
An image is a huge array of gray level (brightness) values of individual pixels Taken individually, these numbers are almost meaningless, because they contain very little information about the scene A robot needs information like "object ahead", "table to the left", or "person approaching" to perform its tasks The conversion of this huge amount of low level information into usable high level information is the subject of computer vision
《计算机视觉》PPT课件
fucntion)
精选课件ppt
11
Overview (3)
计算机视觉的图像模型基础
✓ 摄像机模型及其校准
▪ 内参数、外参数
✓ 图像特征
▪ 边缘、角点、轮廓、纹理、形状…
✓ 图像序列特征 (运动)
▪ 对应点、光流
精选课件ppt
12
Overview (4)
计算机视觉的信号处理层次
低层视觉处理
✓ 单图像:滤波/边缘检测/纹理
计算机视觉的基本的分析工具和数学模型 Signal processing approach: FFT, filtering, wavelets, … Subspace approach: PCA, LDA, ICA, … Bayesian inference approach: EM, Condensation/SIS/…, MCMC, …. Machine learning approach: SVM/Kernel machine, Boosting/Adaboost, NN/Regression, … HMM, BN/DBN, … Gibbs, MRF, …
✓ 多图像:几何/立体/从运动恢复仿射或透视结构 affine/perspective structure from motion
中层视觉处理
✓ 聚类分割/拟合线条、曲线、轮廓 clustering for segmentation, fitting line…
✓ 基于概率方法的聚类分割/拟合
✓ 跟踪 tracking
精选课件ppt
6
Tools
Intel OpenCV, IPL
✓ Camera calibration (Zhang Zhengyou’s method) ✓ Face detection (a variation of Viola’s) ✓ Motion analysis and object tracking
精选课件ppt
11
Overview (3)
计算机视觉的图像模型基础
✓ 摄像机模型及其校准
▪ 内参数、外参数
✓ 图像特征
▪ 边缘、角点、轮廓、纹理、形状…
✓ 图像序列特征 (运动)
▪ 对应点、光流
精选课件ppt
12
Overview (4)
计算机视觉的信号处理层次
低层视觉处理
✓ 单图像:滤波/边缘检测/纹理
计算机视觉的基本的分析工具和数学模型 Signal processing approach: FFT, filtering, wavelets, … Subspace approach: PCA, LDA, ICA, … Bayesian inference approach: EM, Condensation/SIS/…, MCMC, …. Machine learning approach: SVM/Kernel machine, Boosting/Adaboost, NN/Regression, … HMM, BN/DBN, … Gibbs, MRF, …
✓ 多图像:几何/立体/从运动恢复仿射或透视结构 affine/perspective structure from motion
中层视觉处理
✓ 聚类分割/拟合线条、曲线、轮廓 clustering for segmentation, fitting line…
✓ 基于概率方法的聚类分割/拟合
✓ 跟踪 tracking
精选课件ppt
6
Tools
Intel OpenCV, IPL
✓ Camera calibration (Zhang Zhengyou’s method) ✓ Face detection (a variation of Viola’s) ✓ Motion analysis and object tracking
Class01 computer vision 计算机视觉
/sites/default/files/pdfs/coe/gse/Proctor_Form.pdf
If you can, I prefer that you come to school for the exams.
16
GRADING
Optional Extra Credit Project 5%
Please Read Video Streaming Policies & Procedures:
/sites/default/files/pdfs/coe/gse/policies_procedures.pdf
Make Arrangements for a proctor by submitting a Proctor Approval Form before January 22.
Henry Schneiderman
22
Face Recognition
1985
2002
23
surveillance
sports
Fire detection
medical
Challenge:
To develop human-level capabilities for computers and robots.
Tentative dates: 2/5/164 and 3/22/16
Final Exam 30%
Date TBA
Exams are closed book, closed notes 1, 2, and 3 cheat sheets allowed, respectively
15
V35 STREAMED LECTURES
18
Cameras Everywhere...
If you can, I prefer that you come to school for the exams.
16
GRADING
Optional Extra Credit Project 5%
Please Read Video Streaming Policies & Procedures:
/sites/default/files/pdfs/coe/gse/policies_procedures.pdf
Make Arrangements for a proctor by submitting a Proctor Approval Form before January 22.
Henry Schneiderman
22
Face Recognition
1985
2002
23
surveillance
sports
Fire detection
medical
Challenge:
To develop human-level capabilities for computers and robots.
Tentative dates: 2/5/164 and 3/22/16
Final Exam 30%
Date TBA
Exams are closed book, closed notes 1, 2, and 3 cheat sheets allowed, respectively
15
V35 STREAMED LECTURES
18
Cameras Everywhere...
计算机视觉课件8-PPT精品文档30页
a) Select knot position from each polyline segment.
K i (1 v i)V i v iV i 1
b)
wherevi
i
i i1
b) Form lines of guided frame:
KiVi+1: Vi+1Ki+1: KiKi+1:
discontinuous point of s plot.
3) Graph representation:
4) Establish topology relations among edge list points. 5) Each edge point is a graph node.
Struct Node {
b) Fit line segment (say, using least- square method) between the first and the last edge points of the sub list.
c) If normalized maximum error is too large, shorten the sub list at the point of maximum error. Return step b).
3. Curve fitting
Curve fitting is trying to find a smooth curve expression of mathematic form from curve’s polyline expression.
1) Conic sections:
f( x ,y ) a 2 b x c x 2 d y y e x f y 0
Advances in Computer Vision(ppt)
13
Enhanced Perception
Viewing by hearing
• The Voice
P. B. L. Meijer Future Design Technologies Philips Research Laboratories /
Advances in Computer Vision
Massimo Piccardi
Department of Computer Systems, Faculty of Information Technology, University of Technology, Sydney (UTS) e-mail: massimo@.au
• more sophisticated approaches, higher accuracy
New applications are possible
6
Advances in Computer Vision: humans as targets
In recent years, humans have become more and more the target of computer vision applications (see for instance the ICPR 2002 final program) Analysing human actions and behavior is a complex task Modern computer vision systems have provided the required computational power in a cost-effective way
Source: Face Recognition Project at VASC/CMU
Enhanced Perception
Viewing by hearing
• The Voice
P. B. L. Meijer Future Design Technologies Philips Research Laboratories /
Advances in Computer Vision
Massimo Piccardi
Department of Computer Systems, Faculty of Information Technology, University of Technology, Sydney (UTS) e-mail: massimo@.au
• more sophisticated approaches, higher accuracy
New applications are possible
6
Advances in Computer Vision: humans as targets
In recent years, humans have become more and more the target of computer vision applications (see for instance the ICPR 2002 final program) Analysing human actions and behavior is a complex task Modern computer vision systems have provided the required computational power in a cost-effective way
Source: Face Recognition Project at VASC/CMU
计算机视觉--3D Computer Vision ppt课件
ppt课件
22
Vanishing points and lines
Parallel lines in the world intersect in the image at a “vanishing point”
ppt课件
23
Vanishing points and lines
Vanishing Line
Vanishing Pointo
oVanishing Point
ppt课件
24
Vanishing points and lines
Vanishing line
Vertical vanishing point
(at infinity)
Vanishing point
Slide from Efros, Photo from Criminisi
• Many methods have been developed using this approach. • Major advantage -- simple to use. • Low spatial resolution -- patterns become sparser with
distance. • Some close range (4cm) sensors exist with good depth
have an inadequate depth resolution (1cm at best) for most practical industrial vision purposes.
29
Structured Light Methods
• Project patterns of light (grids, stripes, elliptical patterns
最新Computer Vision Multiview Stereo计算机视觉的多视点立体幻灯片课件
Stereo image rectification
computervisionmultiviewstereo计算机视觉的多视点立体论文总结英语资料ppt文档免费阅读免费分享如需请下载
3D Computer Vision
The main goal here is to reconstruct geometry of 3D worlds.
How can we estimate the camera parameters?
Nonlinear camera calibration
Perspective projection:
ui fx
vi
0
1 0
fy 0
uv00•rr12TT 1 r3T
ttt132•xzy1iii
Nonlinear camera calibration
Perspective projection:
- known 3D points on calibration targets
- find corresponding 2D points in image using feature detection algorithm
Camera parameters
Known 3D coords and 2D coords
• D. Scharstein and R. Szeliski. A taxonomy and evaluation of dense two-frame stereo correspondence algorithms. International Journal of Computer Vision, 47(1/2/3):742, April-June 2002.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
At the same time, AI MIT laboratory has attracted many famous scholars from the world to participate in the research of machine vision,which included the theory of machine vision , algorithm and design of system . Professor David Marr in 1973 was invited to lead a research team which is consisted of doctoral students in the MIT AI Lab .in 1977,David Marr put forward a new computer vision theory which is different from the past theory which is build on the analysis method of "blocks world".in the 1980s,his theory had become a very important theoretical framework in the field of machine vision .
Later, people began to makes a deep study of block world and establish a variety of data structures and inference rules.The
scope of the study is abroad,which include the feature extraction
Stage 1: Research on the visual basic method ,which take the model world as the main object; Stage 2: Research on computational theory; visual model ,which is based on the
the research scope of the block world is extensive. it includes the feature extraction of edge and corner,the geometric factor analysis of line and plane.It also build a variety of data structures and inference rules. In the middle of 70's,artificial intelligence (AI) laboratory of Massachusetts Institute of Technology (MIT) officially opened the "machine vision" course.
In the work of Roberts, the relationship between 3D objects and 2D imaging is introduced, and some simple methods of feature extraction are introduced.
2The second purpose is to calculate the Motion parameters from the observation point to the object according to one or more 2D images; 3 T h e third purpose is to c a l c u l a t e t h e p h y s i c a l characteristics from the observation point to the object according to one or more 2D images; There are two ultimate goal that computer vision will realize, they can be simply described as follow:
the simulation of human visual perception generation of computer vision.
Specifically, purpose. computer vision will
leads to the
achieve three basic
1The first purpose is to calculate the distance from the observation point to the object according to one or more 2D images;
Computer Vision
Computer vision research
At the end of the 1950s, computers had became an important tool for human beings to realize the human intelligence and human perception, with the help of computer, For the first time, human beings can realize the extension of mental and perceptual ability as well as the extension of physical strength with the aid of the machine.
In 1991, the publication is divided into two versions, which are CVGIPGMIP (graphics model and image processing) and CVGIP-IU (image underuter vision research
After nearly 50 years, research in computer vision has made considerable achievements. This makes the field to become the most active part of the AI research in the past 40 years. Its mainstream research is divided into three stages:
In 1995, the publication become two magazine . the former named GMIP (graphics model and image processing), the latter named CVIU (computer vision and image understanding). The upsurge of research on computer vision began in 1980s, and in the middle of 80's, the computer vision has developed rapidly, new concepts, new methods and new theories have emerged. So far, computer vision is still a very active research area.
Changes in the name of a publication can reflect the progress of computer vision: 1972, CGIP (computer graphics and image processing) publication; In 1983, its name is processing); CVGIP (computer vision, graphics and image
1960s: Roberts (1965) use a computer program to extracte the threedimensional structure of a polyhedron from the digital images .he also describe the shape and the spatial relationship of objects.
Roberts created a new situation for the research of computer vision . his purpose of research began to become the understanding the threedimensional scene.
History of computer vision
1950s: in this period , statistical pattern recognition is most applied in computer vision , it mainly focuse on the analysis and identification of two-dimensional image,such as: optical character recognition, the surface of the workpiece, the analysis and interpretation of the aerial image.
Later, people began to makes a deep study of block world and establish a variety of data structures and inference rules.The
scope of the study is abroad,which include the feature extraction
Stage 1: Research on the visual basic method ,which take the model world as the main object; Stage 2: Research on computational theory; visual model ,which is based on the
the research scope of the block world is extensive. it includes the feature extraction of edge and corner,the geometric factor analysis of line and plane.It also build a variety of data structures and inference rules. In the middle of 70's,artificial intelligence (AI) laboratory of Massachusetts Institute of Technology (MIT) officially opened the "machine vision" course.
In the work of Roberts, the relationship between 3D objects and 2D imaging is introduced, and some simple methods of feature extraction are introduced.
2The second purpose is to calculate the Motion parameters from the observation point to the object according to one or more 2D images; 3 T h e third purpose is to c a l c u l a t e t h e p h y s i c a l characteristics from the observation point to the object according to one or more 2D images; There are two ultimate goal that computer vision will realize, they can be simply described as follow:
the simulation of human visual perception generation of computer vision.
Specifically, purpose. computer vision will
leads to the
achieve three basic
1The first purpose is to calculate the distance from the observation point to the object according to one or more 2D images;
Computer Vision
Computer vision research
At the end of the 1950s, computers had became an important tool for human beings to realize the human intelligence and human perception, with the help of computer, For the first time, human beings can realize the extension of mental and perceptual ability as well as the extension of physical strength with the aid of the machine.
In 1991, the publication is divided into two versions, which are CVGIPGMIP (graphics model and image processing) and CVGIP-IU (image underuter vision research
After nearly 50 years, research in computer vision has made considerable achievements. This makes the field to become the most active part of the AI research in the past 40 years. Its mainstream research is divided into three stages:
In 1995, the publication become two magazine . the former named GMIP (graphics model and image processing), the latter named CVIU (computer vision and image understanding). The upsurge of research on computer vision began in 1980s, and in the middle of 80's, the computer vision has developed rapidly, new concepts, new methods and new theories have emerged. So far, computer vision is still a very active research area.
Changes in the name of a publication can reflect the progress of computer vision: 1972, CGIP (computer graphics and image processing) publication; In 1983, its name is processing); CVGIP (computer vision, graphics and image
1960s: Roberts (1965) use a computer program to extracte the threedimensional structure of a polyhedron from the digital images .he also describe the shape and the spatial relationship of objects.
Roberts created a new situation for the research of computer vision . his purpose of research began to become the understanding the threedimensional scene.
History of computer vision
1950s: in this period , statistical pattern recognition is most applied in computer vision , it mainly focuse on the analysis and identification of two-dimensional image,such as: optical character recognition, the surface of the workpiece, the analysis and interpretation of the aerial image.