ADAMS操作与实例
adams_view使用实例
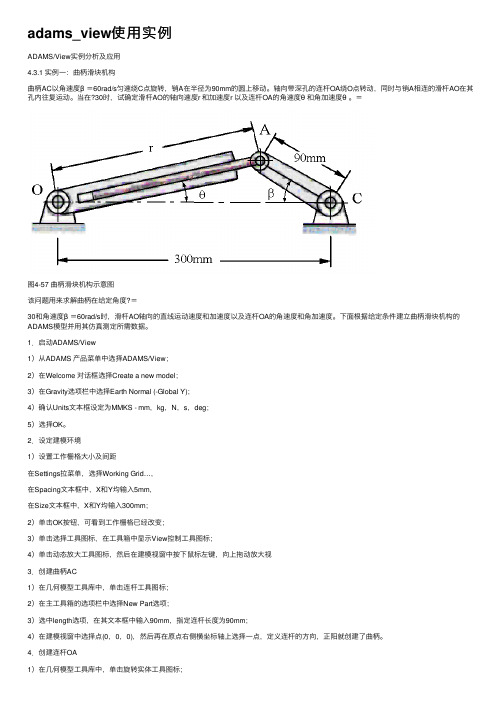
adams_view使⽤实例ADAMS/View实例分析及应⽤4.3.1 实例⼀:曲柄滑块机构曲柄AC以⾓速度β=60rad/s匀速绕C点旋转,销A在半径为90mm的圆上移动。
轴向带深孔的连杆OA绕O点转动,同时与销A相连的滑杆AO在其孔内往复运动。
当在?30时,试确定滑杆AO的轴向速度r 和加速度r 以及连杆OA的⾓速度θ和⾓加速度θ。
=图4-57 曲柄滑块机构⽰意图该问题⽤来求解曲柄在给定⾓度?=30和⾓速度β=60rad/s时,滑杆AO轴向的直线运动速度和加速度以及连杆OA的⾓速度和⾓加速度。
下⾯根据给定条件建⽴曲柄滑块机构的ADAMS模型并⽤其仿真测定所需数据。
1.启动ADAMS/View1)从ADAMS 产品菜单中选择ADAMS/View;2)在Welcome 对话框选择Create a new model;3)在Gravity选项栏中选择Earth Normal (-Global Y);4)确认Units⽂本框设定为MMKS - mm,kg,N,s,deg;5)选择OK。
2.设定建模环境1)设置⼯作栅格⼤⼩及间距在Settings拉菜单,选择Working Grid…,在Spacing⽂本框中,X和Y均输⼊5mm,在Size⽂本框中,X和Y均输⼊300mm;2)单击OK按钮,可看到⼯作栅格已经改变;3)单击选择⼯具图标,在⼯具箱中显⽰View控制⼯具图标;4)单击动态放⼤⼯具图标,然后在建模视窗中按下⿏标左键,向上拖动放⼤视3.创建曲柄AC1)在⼏何模型⼯具库中,单击连杆⼯具图标;2)在主⼯具箱的选项栏中选择New Part选项;3)选中length选项,在其⽂本框中输⼊90mm,指定连杆长度为90mm;4)在建模视窗中选择点(0,0,0),然后再在原点右侧横坐标轴上选择⼀点,定义连杆的⽅向,正阳就创建了曲柄。
4.创建连杆OA1)在⼏何模型⼯具库中,单击旋转实体⼯具图标;2)在主⼯具箱的选项栏中选择New Part选项;3)在建模视窗中选择点(0,0,0)和(-210mm,0,0)定义创建柱体的轴线;4)在建模视窗中选择下列点(0,5,0),(0,10,0),(-210,10,0),(-210,5,0),(0,5,0)创建连杆OA截⾯轮廓;注意:如果ADAMS/View⾃动捕捉特殊点,按Ctrl键可以选择任意位置。
ADAMS基础培训-实例讲解
3.1 输入试验数据
选择数据类型 数据路径 模型选择
3.2 试验数据建立曲线
后处理
数据选择
设置独立坐标轴
试验数据曲线
3.3 编辑曲线
曲线编辑
标题
坐标轴
曲线名称
试验数据曲线
3.4 仿真数据建立曲线并与试验数据对比
➢在图表生成器中选择Last_Run(…)。 ➢选择Last_Run(…)和overcenter作为水平轴数据。 ➢选择SPRING_1_MEA_1作为垂直轴数据,再选Add Curves。 ➢将该曲线的legend文字改为Virtual Test Data。
1.7 创建手柄
➢点击鼠标右键打开工具包 点击Link图标 ➢ 用鼠标左键点选Point_5、Point_6,创建连杆。 ➢对模型进行重命名,Slider。
1.8 创建铰接
➢点击鼠标右键打开工具包 点击Revolute Joint 图 标 ,选择2 Bod-1Loc,Normal To Grid。 ➢ 点击ground,Pivot和Point_1在Point_1处创建大地与 曲柄间的铰接。 ➢按照上述操作设置链接:
1、手柄与曲柄之间的Point_3, 2、手柄与连杆之间的Point_5, 3、连杆与钩子之间的Point_6, 4、钩子与曲柄之间的Point_2。
1.9 模型验证
验证模型:
➢4 移动物体 ➢5 铰接约束 ➢ 2 自由度
二、测试模型
建立地块(Ground Block) 建立锁钩与地块间 In plane约束 建立一个拉压弹簧 加一个手柄力 角度测试,测试弹簧力 生成传感器 模型仿真
ADAMS操作与实例

ADAMS操作与实例ADAMS(Automated Dynamic Analysis of Mechanical Systems)是一种基于计算机模拟的动力学分析软件,用于研究和优化机械系统的动力学行为。
它可以对复杂的机械系统进行建模,模拟其在多种运动和环境条件下的动态响应,并提供详细的分析结果和优化建议。
ADAMS软件提供了丰富的建模工具,包括刚体、弹簧、阻尼器、杆件等各种元件,以及各种运动和载荷条件的定义和设置。
用户可以通过图形化界面进行建模,设置材料属性、约束条件和运动轨迹等,也可以通过脚本进行高级定制。
ADAMS的运算模型基于动力学原理,可以准确地模拟机械系统的运动、力学性能和耦合效应。
它可以分析各种运动学和动力学问题,例如刚体运动路径、力的传递和转矩分配、接触碰撞、振动和动态响应等。
用户可以通过设置不同的运动和载荷条件,模拟不同的工作环境和使用情况,并对系统的稳定性和性能进行评估。
ADAMS还提供了先进的分析和优化工具,如正弦响应分析(Sine Response Analysis)、随机响应分析(Random Response Analysis)、模态分析(Modal Analysis)和优化设计(Optimization Design)等。
这些工具可以帮助用户深入理解机械系统的动力学行为,找出系统中的关键问题,并寻找最佳的设计参数和控制策略。
首先,我们需要收集汽车悬挂系统的相关数据和参数,包括悬挂臂的长度、悬挂弹簧的刚度和阻尼系数、减震器的参数等。
然后,使用ADAMS的建模工具,将这些参数输入到软件中,进行系统的几何建模。
在建模过程中,我们可以设置各个零部件之间的约束条件,如球面连接、铰链连接等。
还可以定义各个零部件的运动类型和运动规律,例如设置悬挂臂的运动轨迹为垂直向下的等速运动。
此外,还可以设置运动过程中的外部载荷,如道路因素引起的颠簸等。
完成建模后,我们可以进行系统的初始状态仿真。
ADAMS分析实例-经典超值

A D A M S 分析实例-定轴轮系和行星轮系传动模拟有一对外啮合渐开线直齿圆柱体齿轮传动.已知ο20,4,25,5021====αmm m z z ,两个齿轮的厚度都是50mm 。
⒈启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Createanewmodel ”,在模型名称(Modelname )栏中输入:dingzhouluenxi ;在重力名称(Gravity )栏中选择“EarthNormal(-GlobalY)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1欢迎对话框⒉设置工作环境对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(WorkingGrid )命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。
然后点击“OK ”确定。
如图2-1所表示。
用鼠标左键点击选择(Select )图标,控制面板出现在工具箱中。
用鼠标左键点击动态放大(DynamicZoom )图标,在模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
⒊创建齿轮在ADAMS/View 零件库中选择圆柱体 (Cylinder )图标,参数选择为“NewPart ”,长度(Length )选择50mm (齿轮的厚度),半径(Radius )选择100mm(10025042z m 1=⨯=⨯)。
如图3-1所示。
图2-1设置工作网格对话框图3-1设置圆柱体选项在ADAMS/View 工作窗口中先用鼠标任意左键选择点(0,0,0)mm ,然后选择点(0,50,0)。
则一个圆柱体(PART_2)创建出来。
ADAMS操作与实例解析
ADAMS操作与实例解析ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一种常用的机械系统动力学仿真与分析软件,可以用于模拟和优化各种机械系统,包括汽车、飞机、船舶、机械臂等。
在这篇文章中,将介绍ADAMS的操作流程以及一些实例解析。
1.建模:ADAMS提供了丰富的建模工具,可以通过创建零件模型来构建机械系统的模型。
用户可以直接导入CAD文件或者通过ADAMS的建模工具手动创建零件模型。
在建模过程中,用户需要定义每个零件的几何特征和物理性质。
2.装配:在建模完成后,需要对所有的零件进行装配操作。
用户可以使用简单的拖拽操作将零件放置到正确的位置,并设置它们之间的连接关系。
ADAMS提供了多种连接方式,包括球接头、铰接、滑动接头等。
3.定义运动:一旦完成了装配操作,用户需要为机械系统定义运动。
ADAMS支持多种运动方式,包括平移、旋转、摆动等。
用户可以通过设置零件的运动公式或者直接拖动零件使其运动。
4.分析:定义了机械系统的运动后,可以进行多种分析,如运动模拟、动力学分析、碰撞检测等。
ADAMS提供了丰富的分析工具和图表,可以帮助用户研究机械系统的性能和优化设计。
接下来,将通过两个实例来解析ADAMS的应用。
实例一:汽车悬挂系统分析假设我们要分析一种新型的汽车悬挂系统的性能。
首先,我们需要在ADAMS中建立一个悬挂系统的模型,包括车轮、悬挂臂、弹簧等零件。
然后,通过调整零件的连接关系和运动方式,定义悬挂系统的运动。
接着,我们可以进行动力学分析,如行驶过程中的减震性能测试、路面不平度下的车辆响应等。
通过观察ADAMS提供的图表和动画,我们可以评估悬挂系统的性能,并优化设计。
实例二:机器人臂运动规划假设我们要设计一个机械臂,能够完成复杂的运动任务,如抓取物体、放置物体等。
首先,我们需要建立机械臂的模型,包括关节、链接件等零件,并设置它们之间的运动关系。
ADAMS教程很详细手把手教你学会
安装 模型制作和导入 初始设置 模型设置 约束设置 接触设置 弹簧 力的加载 仿真运算 后处理
右键点击弹出子菜单
选取接触关系
在文本框中点右键, 选Contact_Solid—Pick, 然后去图形中选取要添加 的零件
✓点击后弹出接触关系对话框。
同样添加另一个零件, 完成后如图
接触设置
▪ 添加接触关系
✓设置弹簧参数。在弹簧上点右键,如图选择Modify,弹出弹簧属性对话框。 刚度系数 阻尼系数(可不修改) 设置为零 弹簧原长
选择此项
弹簧
▪ 扭簧
✓扭簧的加载,扭簧的加载操作为:先分别选取两个受力物体,然后再选取扭簧的转 动中心。
安装 模型制作和导入 初始设置 模型设置 约束设置 接触设置 弹簧 力的加载 仿真运算 后处理
模型设置
安装 模型制作和导入
▪ 删除多余的点和面
✓在模型转换导入的时候,有时会出现一些破面,破面没有体积,影响仿真,所以要 删除。
✓点一下屏幕空白处,确保当前没有任何零件被选择,然后点菜单中的”Edit-Delete”, 在弹出的菜单中,选取那些没有被重命名过的零件,如partXX,(可多选),点OK 删除。
✓注意:加铰链约束时视图平面一定要与旋转轴垂直,如下图。
约束设置
接触设置
弹簧
力的加载
仿真运算
后处理
图1
图2
图3
约束设置
安装 模型制作和导入 初始设置 模型设置
▪ 滑动杆约束
✓约束需要选取两个物体和一个滑动方向:
▪ 选建立两个点,两个点的连线方向为滑动方向。 ▪ 先选取滑动物体,再选取另一个相对固定物体,再依次点取两个点。 ▪ 修改点的位置的方法见本文第16页。
ADAMS分析实例-经典超值

ADAMS 分析实例-定轴轮系和行星轮系传动模拟有一对外啮合渐开线直齿圆柱体齿轮传动.已知 20,4,25,5021====αmm m z z ,两个齿轮的厚度都是50mm 。
⒈ 启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Create a new model ”,在模型名称(Model name )栏中输入:dingzhouluenxi ;在重力名称(Gravity )栏中选择“Earth Normal (-Global Y)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1 欢迎对话框⒉ 设置工作环境2.1 对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。
然后点击“OK ”确定。
如图2-1所表示。
2.2 用鼠标左键点击选择(Select )图标,控制面板出现在工具箱中。
2.3 用鼠标左键点击动态放大(Dynamic Zoom )图标,在 模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
⒊创建齿轮3.1 在ADAMS/View 零件库中选择圆柱体(Cylinder )图标,参数选择为“NewPart ”,长度(Length )选择50mm (齿轮的厚度),半径(Radius )选择100mm (10025042z m 1=⨯=⨯) 。
如图3-1所示。
图 2-1 设置工作网格对话框图3-1设置圆柱体选项3.2 在ADAMS/View 工作窗口中先用鼠标任意左键选择点(0,0,0)mm ,然后选择点(0,50,0)。
adams入门详解与实例
adams入门详解与实例
ADAMS(自动动力动态分析)是一种模拟技术,用于研究机器运
动和控制程序之间的动态行为。
它可以用于电子、车辆和液压驱动器,以及机器人、电动系统和航空系统等不同类型的机器。
ADAMS可以显示动态输出,并为设计者提供反馈调节以提高系统性能。
ADAMS的主要功能是仿真。
它可以进行广泛的机械和动力仿真,
包括求解机器的动态响应,解决非线性的动力系统问题,研究电气机
械系统的特性,以及研究包括弹性机器和电磁荷载在内的复杂载荷系
统的动态行为。
ADAMS的精度高,可以轻松地模拟出机器系统的动态行为,并能够根据对真实机器系统的行为分析出有效的解决方案。
ADAMS可以使用多种建模语言,如MBL(DynaMath块模型库)、MIT(机械工程应用技术]=]、FORTRAN等,用于创建完整的动态模型。
ADAMS使用结构化的块,元素和模型的类库,可以轻松地创建模型,简化用户设计过程,而不会失去模型的质量和精度。
ADAMS可以通过配置属性自定义模拟,可以设置步骤、变量可视性、分片装置、动态增益、模型粒度等参数来获取有关过程的动态变
化的更多信息。
它提供了多种模拟类型,可以直接在机器和控制程序
之间进行转换。
ADAMS还支持同步和逐柱分析,可以自动检测和修复部件被夹紧的情况。
ADAMS可以使用MATLAB、MS EXCEL等软件的报告功能,可以很容易地将试验结果和分析结果可视化。
它可以在模拟时生成表格和图形,从而使设计者可以快速确定系统性能的改进方案。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
你可以设定工 作网格的显示 状态
设定坐标平面...
绝对坐标轴向 Pre-defined axes, edges, or face normals Locations of existing CSs or vertices
• Settings | Force Graphics: 设定Force, Torque的比例 及属性 • Settings | Solver:求解 过程中的详细设定设定, 如:求解器的种类、公 差、精度、除错、输出 等设定 • Settings | icons :设定 Icons大小、颜色、显示/ 隐藏等属性 • Settings | Fonts :字体 设定
两个运动副的第二个物体(机体)必须相同; 标记点必须在第二个物体上,即在机体上; 标记点的Z轴必须指向运动方向;
直 齿 轮 传 动
螺旋副:限制3个移动,2个转动。 常配合一个移动副使用。
关联副:常用于关联转动副和移动副。
关联转动副(链传动)
也可把转动与移动关联起来 (齿轮齿条)
可使用 Modify Joint 对话框 修改运动副的特性
几何建模
4
运动副
6
驱动
3
5 7
4
6 8 7
9
动态浏览
14 背景颜色
移动
10 动态旋转
15 其他
5 9 10 8 11 12 13 2
右视图
16 视窗布局
测量
13 上下视图
14
15
16 3
恢复/重做
建模环境设置
1 设置坐标系
2 设置单位
3 设置重力 4 设置工作栅格 5 设置背景颜色 6 设置图标
7 启用坐标窗口
8 设置视窗布局和视窗视角 9 设置模型渲染
初始模型建立环境...
设定坐标系统 ADAMS/View 使用直角坐标系 可设定为圆柱坐标系或球坐标
工作目录
欲设定坐标系统 … 使用 主菜单
Settings | Coordinate System 设定单位
① ①
Recurdyn实例及操作
②
流程
ADAMS界面简介——模块构成
ADAMS界面简介——ADAMS/VIEW
标题 工作栅格 下拉菜单
主工具箱
建模与仿真 单击鼠标右 键可打开其 它工具 控制工具箱 显示功能的 变更决定于 你在主工具 箱中所选取 的指令而具 有不同的画 面 坐标系 状态栏
1 1 2
欲设定单位… 使用 主菜单
Settings | Units 设定重力
欲设定重力… 使用 主菜单
Settings | Gravity
你可以设定工作网格的位置与设定坐标平面
使用 主菜单 Settings | Working Grid Settings
设定位置...
绝对原点 现有的坐标系统
在 Measure 对话框点取 Create Strip Chart 功 能
将数据输出为档案或在屏幕上显示 使用下拉式功能表 File | Export/Numeric Data
使用 Plot Builder 中的范本
坐标视窗提供…
1. 坐标值 (X, Y,X) 2. 长度值(dx, dy, dz) 按鼠标左键从A点拖动到B点,坐标视窗会 自动标出相对 X, Y, Z 方向的长度。 Mag是合成长度。
启动方式:
the Main Toolbox tool: the menu bar: View|Coordinates Window Hotkey: F4
Type
Links
Tool
Graphic
Parameters
Width, Depth,2 Anchor CSM (Length), Parent Part Thickness, Radius, Vertex Locations, Anchor CSM, Parent Part
Plates
Extrusions
合并相 交物体
2并入1,2被删除
合并不相 2并入1,2被删除 交物体
求交集
1变成相交部分形状,2被删除
剪切
2剪切1,2与相交部分删除
还原
还原经过上述操作的物体
Type
Points
Tool
Graphic
Parameters Specified
Attach Near/Don’t Attach Location, Parent Part
Open/Closed Profile, Depth, Anchor CSM, Parent Part
Open/Closed Profile, Sweep Angle, Anchor CSM, Parent Part
Revolutions
倒方角(Chamfer) 提供不等半径设定 倒圆角(Fillet) 提供不等半径设定 打孔( Hole ) 提供深度设定 凸台(Boss) 提供高度设定 抽壳(Shell) 提供內(外)薄壳化
Open/Closed, Knot Points, Anchor CSM, Parent Part
Splines
移动、旋转 复制移动
绕Z轴旋转
绕X轴旋转 绕Y轴旋转
旋转移动 对齐移动 旋转中心
旋转步长 移动按钮 移动步长
约束与运动副
运动副约束 基本约束 单击右键 驱动 凸轮副
单击左键
选项
选项
分单作用力和多作用力,可为力或力矩,也可为力和力矩的组合 名称 Force(Single Component) Toque(Single Component) Force Vector(3Component Force) Torque Vector(3Component Torque) General Force (6Component Force/Torque) 图 标 说 明 单作用力,在作用点上施 加单向作用力 单作用力矩,在作用点上 施加单向力矩 力矢量,由三个沿地面坐 标方向的分力构成 力矩矢量,由三个沿地面 坐标方向的分力矩构成 组合力,由六个沿地面坐 标方向的力和力矩构成
一个机构的 系统初始设定 一个机构的 负载与约束条件 执行分析 停止 在计算完成之前, 可以STOP停止运算, 也可以按键ESC执行。 重置 回复到原本的设计状态 动画控制 开始 执行仿真
仿真设定
时间区间 Duration: 相对于仿真结束的时 间量 End Time: 绝对的仿真结束时间 输出 静态平衡 计算目前状态下的 静态平衡仿真 Step Size: 每一个 step 多少时间 Steps: 在时间范围內分割为 多少 steps 仿真种类 (Quasi-)static dynamic kinematic transient
CSMs
Orientation, Location, Parent Part
Arcs
Radius, Start and End Angle, Anchor CSM, Parent Part
Polyline
One Line/Multiple Lines, Open/Closed, Length, Vertex Points Angle, Parent Part
1 location-body impl(一个位置): ADAMS选择最靠近所选位置的构件进行连接,多 用于构件与机体(大地)之间的连接 2 body-1 location(两个构件一个位置): 选择两个构件和一个连接位置,此时连接件固定 在构件1(先选择)上,构件1相对于构件2 (后选择)运动。 2 body-2 location(两个构件两个位置): 选择两个构件和两个连接位置进行连接。 Normal to grid(垂直于栅格):当工作栅格工作 时,垂直于栅格;否则,垂直于屏幕。 Pick feature(选取方向):通过一个在栅格或者 屏幕平面内的方向矢量去顶连接方向。
使用主工具箱中 Measure 工具 可用于 point-to-point 与 included angle
measures
使用鼠标右键产生弹出式选单并 选择 Measure 可用于object 与 point measures
可由下列方式检验 Measure 数据…
使用条状图 使用下拉式功能表 Build| Measure| Display
Wireframe:网线模式
Solid Fill:实体模式
Shaded:阴影模式 Precision Fill:精密实体模式 Precision Shaded:精密阴影 模式 Smooth Shaded: 平 滑 阴 影 模式
ADAMS/VIEW几何建模
欲建立 rigid body ..
对于单作用力和力矩,其运行方向有3种表示方式
1)Space Fixed/Fixed 力的方向全局坐标系中固定,不随零件运动而变化。 2)Body Fixed/Moving 力的方向在所作用零件的零件坐标系中不变。 3)Two Bodies/Between Two Bodies 力的方向在两个零件上的力作用点连线上。
使用 主菜单 使用 几何建模面板 使用Parasolid 核心 具有布尔运算、特征建模、及修改能力 如: 挤出、倒(圆)角、薄壳化等 对于以建好的模型,可以IGES、Parasoild 、STEP及STL等输入。 新增一个部件时,有三种设定: New Part , Add to Part, On the Ground
ADAMS/View为用户观察模型提供了多种方式, 用户可以很容易地从多角度观察模型。例 如,放大模型显示,改变模型的显示角度, 也可以同时显示多个视窗。
设置视窗布局(12种预定以视窗布局)
修改视窗视角 设置模型投影显示效果(正投影图,透视 图) 动态移动和旋转视窗 视图缩放