西门子PLC编程实例一用一备软启动--4台
PLC流程图法编程及实例

PLC流程图法编程及实例可编程逻辑控制器(PLC)是一种广泛应用于工业自动化领域的设备,它通过接收输入信号,执行内部程序,从而控制输出信号,实现对设备的控制。
PLC编程的方法有很多种,其中,流程图法是一种常用的编程方法。
本文将介绍PLC流程图法编程的基本概念、优点、实例及应用实践经验。
PLC流程图法编程是一种图形化的编程语言,它将PLC程序转换成直观的流程图形式,通过在流程图中定义输入、输出变量,以及各个步骤之间的逻辑关系,来实现对PLC程序的编写和控制。
流程图法编程具有直观易懂、易于学习、易于维护等优点,因此,它成为了很多工程师和技术人员首选的PLC编程方法。
直观易懂:流程图使用图形化的方式来表示PLC程序,可以直观地展示程序的结构和逻辑关系,方便工程师和技术人员理解和分析。
易于学习:相比于传统的文本编程语言,流程图法编程更加简单易懂,即使是没有PLC编程经验的人也可以快速上手。
易于维护:在PLC程序调试过程中,流程图法可以更快速地找到程序中的错误和漏洞,方便工程师和技术人员进行程序的修改和维护。
提高效率:使用流程图法编程,可以减少程序调试的时间和成本,提高PLC程序的开发效率。
下面以一个简单的PLC程序为例,介绍如何使用流程图法进行编程。
实例:设计一个控制设备,当按下启动按钮后,设备开始工作,当按下停止按钮后,设备停止工作。
输入变量:启动按钮(X0)、停止按钮(X1)在绘制流程图时,我们需要将输入变量和输出变量在图中表示出来,并使用图形符号来表示输入输出之间的逻辑关系。
根据上面的实例,我们可以绘制如下流程图:开始 -->启动按钮(X0) -->设备状态(Y0) -->工作| ||---------->停止按钮(X1) <--|设备状态(Y0) -->工作状态 <--停止状态 <--结束根据流程图,我们可以编写如下的PLC程序:LD X0 //检查启动按钮是否按下OUT Y0 //将设备状态输出为工作状态LD X1 //检查停止按钮是否按下OUT Y0 //将设备状态输出为停止状态在编写PLC程序时,有些问题需要特别注意:变量的命名:为了避免程序出错和便于维护,变量命名要规范、有含义、易记忆。
用一台软起动器起动多台电动机

用一台软起动器起动多台电动机某厂有1台ABB公司产的PS.S-85/147-45kW的软起动器,原来带动1台45kW电动机。
后因生产需要又增加了45kW、30kW、22kW等3台新负荷。
如果每1台电动机再配上1台软起动器,不仅增加投资,扩大占地面积,而且电气线路复杂。
我们用已有的1台软起动器,起动4台电动机,实现了一机多用的目的,效果良好。
现简介如下。
1.电气控制要求用1台软起动器起动4台电动机应满足下列要求。
(1)4台电动机只允许任选1台起动,不允许同时起动2台及2台以上电动机。
(2)当某台电动机在起动过程中,其他电动机均不能起动,只有在该电动机起动结束后,才可起动另1台电动机。
(3)当某台电动机起动时,必须使这1台电动机由软起动器软起动,不能直接起动。
(4)电气控制系统的可靠性要高,且具有较强的容错能力,即使出现误操作,也不应发生较严重的后果。
(5)对电动机必须有必要的保护措施,如短路、过载、缺相等。
(6)一般情况下,1台软起动器起动次数不得超过6次几。
2.实际应用电路图(1) 主电路图如图1所示。
选用软起动器时,综合考虑软起动器的产地、生产厂及技术先进性、技术特性、质量可靠性、使用耐久性、抗干扰性等因素。
实践证明1台软起动器可起动与其容量大小相同的4台电动机,也可起动比其容量小的4台电动机。
主电路中交流接触器选用上海产的YLDCl系列。
(2)控制电路如图2所示(K3、K4的控制电路略)。
根据生产工艺的要求,每台电动机各设1个起动和停止按钮。
采用2个时间继电器(KTI和KT2)、1个中间继电器(KA8)、1个小交流接触eZ(K12)自动控制各环节的程序,达到设备的正常走动、运转、停止的目的。
图2中的K11、K21、搬1、K41交流接触器常闭触点串联作为主接触器间的电气互锁,又用中间继电器控制作为双重联锁。
KTI控制全电压运行之前软起动的时间长短(根据工艺要求决定)。
因生产设备所拖动的负载性质不同,其起动时间长短不同,我们选用了40s。
用PLC实现单台软起动器对多台电动机起动

用PLC实现单台软起动器对多台电动机起动传统的电动机起动的方法用于要求不高的场合,而选用软起动装置对于要求较高的场合应用。
软起动采用限流、电子起动、智能制动等工作方式。
软起动器适用于大容量电动机的控制。
用PLC来实现单台软起动器对多台电动机的起动式微电子技术和计算机相结合的,体现了小型化、专用化特点,应用越来越广泛。
标签:软起动器;PLC控制系统;手动过程;自动过程软起动器的应用范围广泛,在机械制造、冶金、石化、化纤纺织、食品加工产业领域的各类电力拖动。
取代了Y—△起动器、磁控式起动器、自耦减压起动。
软起动的起动电流可控制在3倍的额定电流以下,使电动机可以平稳起动。
通常异步电动全电压下运行过程中,电动机从空载起动到满载负荷的过程中磁场几乎不变。
因此磁化电流在所有负载下基本上是相同。
所以电机在全压起动时对电网的冲击最大,并且冲击时间也最长。
而通常使用的降压起动对电网的冲击比较小,但当某一个线圈电压切换时会出现二次冲击现象,使破坏程度加大。
软起动在起动前设定了一个对电网不影响的起动电流,电机电流是缓慢增大到设定起动电流,因此没有冲击电流,所以对电网的影响几乎没有,并且消除起动力矩带来冲击。
软起动器为电子调压并对电流实时检测,因此具有相序自动识别及纠正断相、三相电源不平衡、晶闸管超温、缺相、过载、等全电子保护。
1 总体方案本系统中选用一台软起动器对四台电动机的起动。
控制系统要求:一台软起动器起动四台风机,四台风机两台使用,两台备用。
单台风机45Kw。
使用要求:(1)每台都应有手动、自动两种选择,用开关人工设定;(2)无论手动、自动时,风机均由软起动器起动;(3)二用二备,控制程序中要能自动识别;(4)自动运行中,两台风机风量不够时,备用风机要能手工起动运行,通过控制程序实现软起动器起动运行。
软起动器在主电路中的接线如图所示,软起动器输、输出接接触器KMl、KM2、KM3、KM4常开触点,软起动器输入和输出端串联接触器KM和接触器KM2的常开触点。
用PLC设计四台电动机顺序起动逆序停止(电气自动化)
成都航空职业技术学院学生职业技能竞赛活动申报表申报单位:电子工程系成都航空职业技术学院学生职业技能竞赛活动方案设计与实施表申报单位:电子工程系PLC应用技术职业技能竞赛考核评分表(1)本项考核总分100。
(2)时间为180分钟。
(3)超时者按规定扣分(每超5分钟扣2分,最多允许超时30分钟,否则不计成绩)。
爱人者,人恒爱之;敬人者,人恒敬之;宽以济猛,猛以济宽,政是以和。
将军额上能跑马,宰相肚里能撑船。
最高贵的复仇是宽容。
有时宽容引起的道德震动比惩罚更强烈。
君子贤而能容罢,知而能容愚,博而能容浅,粹而能容杂。
宽容就是忘却,人人都有痛苦,都有伤疤,动辄去揭,便添新创,旧痕新伤难愈合,忘记昨日的是非,忘记别人先前对自己的指责和谩骂,时间是良好的止痛剂,学会忘却,生活才有阳光,才有欢乐。
不要轻易放弃感情,谁都会心疼;不要冲动下做决定,会后悔一生。
也许只一句分手,就再也不见;也许只一次主动,就能挽回遗憾。
世界上没有不争吵的感情,只有不肯包容的心灵;生活中没有不会生气的人,只有不知原谅的心。
感情不是游戏,谁也伤不起;人心不是钢铁,谁也疼不起。
好缘分,凭的就是真心真意;真感情,要的就是不离不弃。
爱你的人,舍不得伤你;伤你的人,并不爱你。
你在别人心里重不重要,自己可以感觉到。
所谓华丽的转身,都有旁人看不懂的情深。
人在旅途,肯陪你一程的人很多,能陪你一生的人却很少。
谁在默默的等待,谁又从未走远,谁能为你一直都在?这世上,别指望人人都对你好,对你好的人一辈子也不会遇到几个。
人心只有一颗,能放在心上的人毕竟不多;感情就那么一块,心里一直装着你其实是难得。
动了真情,情才会最难割;付出真心,心才会最难舍。
你在谁面前最蠢,就是最爱谁。
其实恋爱就这么简单,会让你智商下降,完全变了性格,越来越不果断。
所以啊,不管你有多聪明,多有手段,多富有攻击性,真的爱上人时,就一点也用不上。
这件事情告诉我们。
谁在你面前很聪明,很有手段,谁就真的不爱你呀。
西门子PLC基本指令应用编程实例
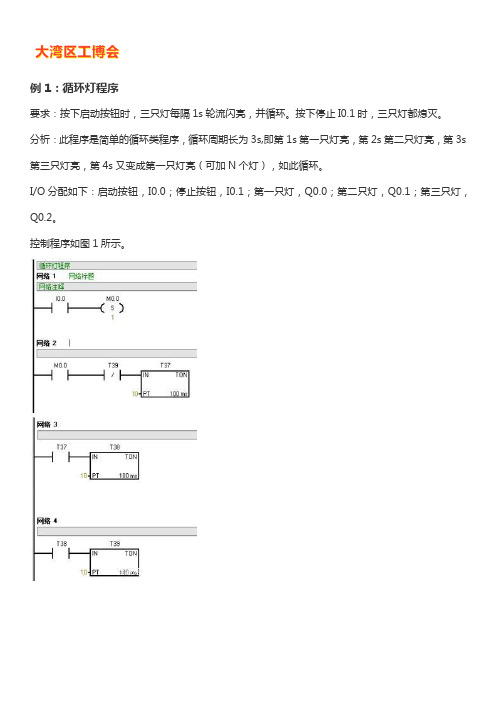
例1:循环灯程序要求:按下启动按钮时,三只灯每隔1s轮流闪亮,并循环。
按下停止I0.1时,三只灯都熄灭。
分析:此程序是简单的循环类程序,循环周期长为3s,即第1s第一只灯亮,第2s第二只灯亮,第3s 第三只灯亮,第4s又变成第一只灯亮(可加N个灯),如此循环。
I/O分配如下:启动按钮,I0.0;停止按钮,I0.1;第一只灯,Q0.0;第二只灯,Q0.1;第三只灯,Q0.2。
控制程序如图1所示。
图1例2:多级皮带控制程序如图2所示是一个四级传送带系统示意图。
整个系统有四台电动机,控制要求如下:(1)落料漏斗YO启动后,传送带M1应马上启动,经6s后须启动传送带M2;(2)传送带M2启动5s后应启动传送带M3;(3)传送带M3启动4s后应启动传送带M4;(4)落料停止后,为了不让齐级皮带上有物料维积,应根据所需传送时间的差别,分别将四台电机停车。
即落料漏斗YO断开后过6s再断M1, M1断开后再过5s断M2,M2断开4s后再断M3,M3断开3s后再断开M4。
此程序为典型的时间顺序控制。
I/O分配如下:启动,I0.0;停止,I0.1;落料YO,Q0.0;传送带M1,Q0.1;传送带M2,Q0.2;传送带M3,Q0.3;传送带M4,Q0.4。
控制程序如图2-1所示,程序中M0.0控制启动过程,M0.1 控制停止过程。
图2-1例3:编写交通信号灯控制程序图3对如图3所示十字路口交通灯进行编程控制,该系统输入信号有:一个启动按钮SB1和一个停止按钮SB2。
输出信号有东西向红灯、绿灯、黄灯,南北向红灯、绿灯、黄灯。
控制要求:按下启动按钮,信号灯系统按图3-1的时序开始工作(绿灯闪烁的周期为1s),并能循环运行。
按一下停止按钮,所有信号灯都熄灭。
图3-1 PLC的I/O分配,I/O接线图如图3-2所示。
图3-2该程序是一个循环类程序,交通灯执行一周的时间为60s,可把周期60s分成0~25s、25~ 28s、28~30s、30~55s、55~58s、58~60s 共6段时间,在25~ 28s、55~58s段编写一个周期为1s 的脉冲程序串入其中。
四台电动机顺序循环控制

内容摘要用西门子S7-200控制四台电动机顺序循环控制。
本文给了详细的设计过程,做出系统的主电路与控制电路,I/O地址分配,和相关的梯形图,控制程序和控制过程的说明。
关键词:梯形图;循环;控制目录第1章引言............................................................................................... 错误!未定义书签。
第2章系统的控制要求. (2)2.1 系统的控制要求 (2)第3章主电路与控制电路设计 (3)3.1 主电路设计 (3)3.2 控制电路设计 (4)第4章 PLC选择及I/O连接图 (5)4.1 PLC和选择 (5)4.2系统资源分配 (5)4.3 I/0连接图 (7)第5章梯形图与语句表 (8)5.1 梯形图 (8)5.2 语句表 (11)课程设计总结 (13)致谢 (14)参考文献 (15)第1章引言1.1 PLC控制系统设计的基本原则任何一种控制系统都是为了实现被控对象的工艺要求,以提高生产效率和产品质量。
因此,在设计PLC控制系统时,应遵循以下基本原则:1. 最大限度地满足被控对象的控制要求充分发挥PLC的功能,最大限度地满足被控对象的控制要求,是设计PLC控制系统的首要前提,这也是设计中最重要的一条原则。
这就要求设计人员在设计前就要深入现场进行调查研究,收集控制现场的资料,收集相关先进的国内、国外资料。
同时要注意和现场的工程管理人员、工程技术人员、现场操作人员紧密配合,拟定控制方案,共同解决设计中的重点问题和疑难问题。
2. 保证PLC控制系统安全可靠保证PLC控制系统能够长期安全、可靠、稳定运行,是设计控制系统的重要原则。
这就要求设计者在系统设计、元器件选择、软件编程上要全面考虑,以确保控制系统安全可靠。
例如:应该保证PLC程序不仅在正常条件下运行,而且在非正常情况下(如突然掉电再上电、按钮按错等),也能正常工作。
西门子PLC-电动机的顺序启动控制(定时器)案例

启动按 钮
Q0.1
KM2
电机2运转交流接 触器
项目二:电动机顺序启动、同时停止控制
PLC接线图
SB1 i0.0 SB2 i0.1 Q0.1 Q0.0 KM2 KM1 FR
24V COM
COM
FU 220V
项目二:电动机顺序启动、同时停止控制 梯形图
项目三:电动机顺序启动、逆序停止控制
项目三:电动机顺序启动、逆序停止控制
西门子PLC-电动机的顺序启动 控制(定时器)案例
三相异步电动机的顺序启动控制
电动机的顺序启动控制(定时器): 项目一:电动机顺序启动、顺序停止控制 项目二:电动机的顺序启动、同时停止 项目三:电动机的顺序启动、逆序停止 项目四:电动机延时启动、停止控制
项目一:电动机顺序启动、顺序停止控制
需完成的项目: 项目一:电动机顺序启动、顺序停止控制 项目二:电动机的顺序启动、同时停止 项目三:电动机的顺序启动、逆序停止 项目四:电动机延时启动、停止控制
1ms
TON TOF TONR T32,T96 T32,T96 T0,T64
10ms
T33~T36, T97~T100 T33~T36, T97~T100 T1~T4, T65~T68
结
束
100ms
T37~T63,T101~T255 T37~T63,T101~T255 T5~T31,T69~T95
三相异步电动机的降压启动控制
项目一:笼型感应电动机定子绕组串电阻 降压启动控制系统 项目二:三相绕线感应电动机转子绕组串 电阻降压启动控制系统 项目三: Y-△降压启动控制系统 项目四:自耦变压器降压启动控制系统
24V COM
西门子PLC编程实例一用一备软启动--4台

数据类型 BOOL
注释
更多编程实例请访问/ 更多编程实例请访问/ 视频教程、编程实例、编 程软件、解密软件、编程手册等PLC学习资料请点击/item.htm?spm=1103yTdq.1-eM18.v3lVci&id=13979008783#
T121
/
/
/
/
6.A
M4.2
启动2#输出:Q0.2 P
M4.0
T122
启动2#输出:Q0.2
6.A
/
符号 二号故障输入 启动2#输出 一号故障输入 运行2#输出
网络 7
一号故障输入:I2.2
地址 I2.3 Q0.2 I2.2 Q0.3
M3.2
M4.2
运行2#输出 :Q0.3
注释 2#电机过载反回的故障信号 2#电机软启接触器闭合 1#电机过载反回的故障信号 2#电机工频接触器闭合
运行3#输出:Q0.5 /
注释 3#电机软启接触器闭合 4#电机软启接触器闭合 手动开关3#电机 4#电机运行后工频接触器反馈的信号 3#电机工频接触器闭合
M1.1
符号 运行3#输出
地址 Q0.5
注释 3#电机工频接触器闭合
6 / 35
网络 3 M1.2
西门子PLC编程实例一用一备软启动--4台 / 手动2组程序 (SBR1) 手动3#输入:I0.4 运行3#输出:Q0.5
注释 手动开关2#电机 2#电机工频接触器闭合
5 / 35
西门子PLC编程实例一用一备软启动--4台 / 手动2组程序 (SBR1)
块:
手动2组程序
作者:
创建时间: 2003.05.10
修改时间: 2003.05.19
15:53:22 22:12:09
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
块:PLC编程实例::178725208:.05.08 19:10:23:.03.01 9:08:22符号变量类型数据类型注释TEMP BOOL TEMP BOOLTEMP TEMP更/更多编程实例请访问/视频教程、编程实例、编、解密软件、编程手册等PLC学习资料请点击/item.htm?spm=1103yTdq.1-eM18.v-lVci&id=139********#手动程序部分网1网络注释/1组程序EN2组程序ENNR R 手动输入:0.0自动输入:0.11#输出 :0.0100.016符号地址注释1#输出 Q0.0#电机软启接触器闭合手动输入I0.0,闭合=手动自动输入I0.1,闭合=自动自动程序部分网2网络注释/1组程序EN2组程序ENNR R 自动输入:0.1手动输入:0.01#输出 :0.0103.048符号地址注释1#输出 Q0.0#电机软启接触器闭合手动输入I0.0,闭合=手动自动输入I0.1,闭合=自动故障程序部分网30.0故障程序EN块:1组程序::.05.08 19:10:23:.05.19 22:12:09符号变量类型数据类型注释ENIN BOOLIN IN_OUT OUT TEMP更/更多编程实例请访问/视频教程、编程实例、编、解密软件、编程手册等PLC学习资料请点击/item.htm?spm=1103yTdq.1-eM18.v-lVci&id=139********#1#电机 网1//P2#输出:0.21#输入:0.21#输出:0.11#输出 :0.0二号运行输入: 1.51#输出 :0.00.0符号地址注释二号运行输入I1.5#电机运行后工频接触器反馈的信号1#输出 Q0.0#电机软启接触器闭合2#输出Q0.2#电机软启接触器闭合1#输入I0.21#电机1#输出Q0.1#电机工频接触器闭合网2/0.01#输出:0.10.10.1符号地址注释1#输出Q0.1#电机工频接触器闭合网30.21#输入:0.21#输出:0.11#输出:0.1符号地址注释1#输入I0.21#电机1#输出Q0.1#电机工频接触器闭合公共程序网4//0.11011021启停输出: 1.00.5符号地址注释1启停输出Q1.0#软启动器启动信号公共程序网5P软启一旁路输入: 1.20.2符号地址注释软启一旁路输入I1.2#软启动器启动完成后,常开闭合,短接工频接触器2#电机 网6//P1#输出 :0.02#输入:0.32#输出 :0.32#输出:0.2一号运行输入: 1.42#输出:0.20.4符号地址注释1#输出 Q0.0#电机软启接触器闭合2#输出Q0.2#电机软启接触器闭合2#输入I0.32#电机一号运行输入I1.4#电机运行后工频接触器反馈的信号2#输出 Q0.3#电机工频接触器闭合网7/0.42#输出 :0.30.50.5符号地址注释2#输出 Q0.3#电机工频接触器闭合PL C编程实例一用一备软启动--4台/手动1组程序(SB R0)网80.22#输入:0.32#输出 :0.32#输出 :0.3符号地址注释2#输入I0.32#电机2#输出 Q0.3#电机工频接触器闭合块:2组程序::.05.10 15:53:22:.05.19 22:12:09符号变量类型数据类型注释ENIN BOOLIN IN_OUT OUT TEMP更/更多编程实例请访问/视频教程、编程实例、编、解密软件、编程手册等PLC学习资料请点击/item.htm?spm=1103yTdq.1-eM18.v-lVci&id=139********#3#电机 网1//P4#输出:0.63#输入:0.43#输出:0.53#输出:0.4四号运行输入: 2.13#输出:0.41.0符号地址注释3#输出Q0.4#电机软启接触器闭合4#输出Q0.6#电机软启接触器闭合3#输入I0.43#电机四号运行输入I2.1#电机运行后工频接触器反馈的信号3#输出Q0.5#电机工频接触器闭合网2/1.03#输出:0.51.11.1符号地址注释3#输出Q0.5#电机工频接触器闭合PTOFINmsPT 1.23#输入:0.43#输出:0.53#输出:0.53#输出:0.51111200符号地址注释3#输入I0.43#电机3#输出Q0.5#电机工频接触器闭合公共程序网41.12启停输出: 1.11.5符号地址注释2启停输出Q1.1#软启动器启动信号公共程序网5P软启二旁路输入: 1.31.2符号地址注释软启二旁路输入I1.3#软启动器启动完成后,常开闭合,短接工频接触器4#电机 网6//P3#输出:0.44#输入:0.54#输出:0.74#输出:0.6三号运行输入: 2.04#输出:0.61.4符号地址注释3#输出Q0.4#电机软启接触器闭合4#输出Q0.6#电机软启接触器闭合三号运行输入I2.0#电机运行后工频接触器反馈的信号4#输入I0.54#电机4#输出Q0.7#电机工频接触器闭合/1.44#输出:0.71.51.5符号地址注释4#输出Q0.7#电机工频接触器闭合网8PTOFINmsPT 1.24#输入:0.54#输出:0.74#输出:0.74#输出:0.71121200符号地址注释4#输入I0.54#电机4#输出Q0.7#电机工频接触器闭合网9网络标题网10网络注释块:1组程序::.05.10 15:53:46:.05.19 23:23:20符号变量类型数据类型注释ENIN BOOLIN IN_OUT OUT TEMP更/更多编程实例请访问/视频教程、编程实例、编、解密软件、编程手册等PLC学习资料请点击/item.htm?spm=1103yTdq.1-eM18.v-lVci&id=139********#号电机网1网络注释1#输~:0.61#输~:0.73.03.0符号地址注释1#输入I0.61组自动时外接开信号,外接常开1#输入I0.71组自动时外接停止信号,外接常闭网2//////P3.0二号故障输入: 2.3一号故障输入: 2.23.31#输出:0.11221#输出 :0.04.21#输出 :0.0符号地址注释二号故障输入I2.3#电机过载反回的故障信号1#输出 Q0.0#电机软启接触器闭合一号故障输入I2.2#电机过载反回的故障信号1#输出Q0.1#电机工频接触器闭合网3//3.11#输出:0.12#输出 :0.31#输~:0.71启停输出: 1.04.01启停输出: 1.0符号地址注释1启停输出Q1.0#软启动器启动信号1#输出Q0.1#电机工频接触器闭合2#输出 Q0.3#电机工频接触器闭合1#输入I0.71组自动时外接停止信号,外接常闭网4P软启一旁路输入: 1.23.2符号地址注释软启一旁路输入I1.2#软启动器启动完成后,常开闭合,短接工频接触器网5//PTOFINmsPT 二号故障输入: 2.3 3.21#输~:0.7一号故障输入: 2.21#输出:0.14.21#输出:0.11211#输出:0.11200符号地址注释二号故障输入I2.3#电机过载反回的故障信号一号故障输入I2.2#电机过载反回的故障信号1#输出Q0.1#电机工频接触器闭合1#输入I0.71组自动时外接停止信号,外接常闭号电机网6/////P3.0一号故障输入: 2.2二号故障输入: 2.34.12#输出 :0.31222#输出:0.24.22#输出:0.2符号地址注释二号故障输入I2.3#电机过载反回的故障信号2#输出Q0.2#电机软启接触器闭合一号故障输入I2.2#电机过载反回的故障信号2#输出 Q0.3#电机工频接触器闭合网7/PTOFINmsPT 一号故障输入: 2.2 3.21#输~:0.7二号故障输入: 2.32#输出 :0.34.22#输出 :0.31222#输出 :0.31200符号地址注释二号故障输入I2.3#电机过载反回的故障信号一号故障输入I2.2#电机过载反回的故障信号2#输出 Q0.3#电机工频接触器闭合1#输入I0.71组自动时外接停止信号,外接常闭循环程序网8NCTUCUPRPV0.0 3.02网9I 0 14.2块:2组程序::.05.10 15:55:25:.05.19 22:12:09符号变量类型数据类型注释ENIN BOOLIN IN_OUT OUT TEMP更/更多编程实例请访问/视频教程、编程实例、编、解密软件、编程手册等PLC学习资料请点击/item.htm?spm=1103yTdq.1-eM18.v-lVci&id=139********#号电机网1网络注释2#输~: 1.02#输~: 1.15.05.0符号地址注释2#输入I1.02组自动时外接开信号,外接常开2#输入I1.12组自动时外接停止信号,外接常闭网2//////P5.0四号故障输入: 2.5三号故障输入: 2.45.33#输出:0.51323#输出:0.46.23#输出:0.4符号地址注释3#输出Q0.4#电机软启接触器闭合三号故障输入I2.4#电机过载反回的故障信号四号故障输入I2.5#电机过载反回的故障信号3#输出Q0.5#电机工频接触器闭合网3//5.13#输出:0.54#输出:0.72#输~: 1.12启停输出: 1.16.02启停输出: 1.1符号地址注释2启停输出Q1.1#软启动器启动信号3#输出Q0.5#电机工频接触器闭合4#输出Q0.7#电机工频接触器闭合2#输入I1.12组自动时外接停止信号,外接常闭网4P软启二旁路输入: 1.35.2符号地址注释软启二旁路输入I1.3#软启动器启动完成后,常开闭合,短接工频接触器网5//PTOFINmsPT 四号故障输入: 2.5 5.22#输~: 1.1三号故障输入: 2.43#输出:0.56.23#输出:0.51313#输出:0.51200符号地址注释三号故障输入I2.4#电机过载反回的故障信号四号故障输入I2.5#电机过载反回的故障信号3#输出Q0.5#电机工频接触器闭合2#输入I1.12组自动时外接停止信号,外接常闭号电机网6/////P5.0三号故障输入: 2.4四号故障输入: 2.56.14#输出:0.71324#输出:0.66.24#输出:0.6符号地址注释4#输出Q0.6#电机软启接触器闭合三号故障输入I2.4#电机过载反回的故障信号四号故障输入I2.5#电机过载反回的故障信号4#输出Q0.7#电机工频接触器闭合网7/PTOFINmsPT 三号故障输入: 2.4 5.22#输~: 1.1四号故障输入: 2.54#输出:0.76.24#输出:0.71324#输出:0.71200符号地址注释三号故障输入I2.4#电机过载反回的故障信号四号故障输入I2.5#电机过载反回的故障信号4#输出Q0.7#电机工频接触器闭合2#输入I1.12组自动时外接停止信号,外接常闭循环程序网8NCTUCUPRPV0.0 5.0112I 1 16.2::.05.10 15:55:48:.05.19 22:12:09符号变量类型数据类型注释ENIN BOOLIN IN_OUT OUT TEMP更/更多编程实例请访问/视频教程、编程实例、编、解密软件、编程手册等PLC学习资料请点击/item.htm?spm=1103yTdq.1-eM18.v-lVci&id=139********#号电机故障及累计程序网1网络注释一号故障输入: 2.21故障输出: 2.0符号地址注释1故障输出Q2.0#电机故障时输出继电器信号一号故障输入I2.2#电机过载反回的故障信号网2PCTUCUPRPV1故障输出: 2.055100符号地址注释1故障输出Q2.0#电机故障时输出继电器信号网3_WENOENOUT IN 0.050号电机故障及累计程序网4二号故障输入: 2.32故障输出: 2.1符号地址注释2故障输出Q2.1#电机故障时输出继电器信号二号故障输入I2.3#电机过载反回的故障信号网5PCTUCUPRPV2故障输出: 2.166100符号地址注释2故障输出Q2.1#电机故障时输出继电器信号网6_WENOENOUT IN 0.062号电机故障及累计程序网7三号故障输入: 2.43故障输出: 2.2符号地址注释3故障输出Q2.2#电机故障时输出继电器信号三号故障输入I2.4#电机过载反回的故障信号PCTUCUPRPV3故障输出: 2.277100符号地址注释3故障输出Q2.2#电机故障时输出继电器信号网9_WENOENOUT IN 0.074号电机故障及累计程序网10四号故障输入: 2.54故障输出: 2.3符号地址注释4故障输出Q2.3#电机故障时输出继电器信号四号故障输入I2.5#电机过载反回的故障信号网11PCTUCUPRPV4故障输出: 2.388100符号地址注释4故障输出Q2.3#电机故障时输出继电器信号_WENOENOUT IN 0.086PL C编程实例一用一备软启动--4台/IN T_0(IN T0)块:_0::.05.08 19:10:23:.05.19 22:12:09符号变量类型数据类型注释TEMPTEMPTEMPTEMP更/视频教程、编程实例、编程软件、解密软件、编程手册等PLC学习资/item.htm?spm=1103yTdq.1-eM18.v-3lVci&id=139********#网络标题网1网络注释手动输入I0.0,闭合=手动自动输入I0.1,闭合=自动1#输入I0.21#电机2#输入I0.32#电机3#输入I0.43#电机4#输入I0.54#电机1#输入I0.61组自动时外接开信号,外接常开1#输入I0.71组自动时外接停止信号,外接常闭2#输入I1.02组自动时外接开信号,外接常开2#输入I1.12组自动时外接停止信号,外接常闭软启一旁路输入I1.2#软启动器启动完成后,常开闭合,短接工频接触器软启二旁路输入I1.3#软启动器启动完成后,常开闭合,短接工频接触器一号运行输入I1.4#电机运行后工频接触器反馈的信号二号运行输入I1.5#电机运行后工频接触器反馈的信号三号运行输入I2.0#电机运行后工频接触器反馈的信号四号运行输入I2.1#电机运行后工频接触器反馈的信号一号故障输入I2.2#电机过载反回的故障信号二号故障输入I2.3#电机过载反回的故障信号三号故障输入I2.4#电机过载反回的故障信号四号故障输入I2.5#电机过载反回的故障信号I2.6I2.71#输出 Q0.0#电机软启接触器闭合1#输出Q0.1#电机工频接触器闭合2#输出Q0.2#电机软启接触器闭合2#输出 Q0.3#电机工频接触器闭合3#输出Q0.4#电机软启接触器闭合3#输出Q0.5#电机工频接触器闭合4#输出Q0.6#电机软启接触器闭合4#输出Q0.7#电机工频接触器闭合1启停输出Q1.0#软启动器启动信号2启停输出Q1.1#软启动器启动信号Q1.2Q1.3Q1.4Q1.5Q1.6Q1.71故障输出Q2.0#电机故障时输出继电器信号2故障输出Q2.1#电机故障时输出继电器信号3故障输出Q2.2#电机故障时输出继电器信号4故障输出Q2.3#电机故障时输出继电器信号Q2.4Q2.5Q2.6Q2.71组程序SBR0//、编程实例、编程软件、解密软件、编程手册等学习资料请点击/item.htm?spm=1103yTdq.1-eM18.v-3lVci&id=139********# 2组程序SBR1//、编程实例、编程软件、解密软件、编程手册等学习资料请点击/item.htm?spm=1103yTdq.1-eM18.v-3lVci&id=139********# 1组程序SBR2//、编程实例、编程软件、解密软件、编程手册等学习资料请点击/item.htm?spm=1103yTdq.1-eM18.v-3lVci&id=139********# 2组程序SBR3//、编程实例、编程软件、解密软件、编程手册等学习资料请点击/item.htm?spm=1103yTdq.1-eM18.v-3lVci&id=139********#故障程序SBR4//、编程实例、编程软件、解密软件、编程手册等学习资料请点击/item.htm?spm=1103yTdq.1-eM18.v-3lVci&id=139********#INT_0INT0/、编程实例、编程软件、解密软件、编程手册等学习资料请点击/item.htm?spm=1103yTdq.1-eM18.v-3lVci&id=139********# PLC编程实例OB1//、编程实例、编程软件、解密软件、编程手册等学习资料请点击/item.htm?spm=1103yTdq.1-eM18.v-3lVci&id=139********#:I0.0PLC编程实例1-| |-(OB1)2-|/|-:I0.0PLC编程实例(OB1):I0.1PLC编程实例1-|/|-(OB1)2-| |-:I0.1PLC编程实例(OB1)1#输入:I0.21组程序1-| |-(SBR0)1#输入:I0.21组程序3-| |-(SBR0)2#输入:I0.31组程序6-| |-(SBR0)8-| |-2#输入:I0.31组程序(SBR0)3#输入:I0.42组程序1-| |-(SBR1)3-| |-3#输入:I0.42组程序(SBR1)4#输入:I0.52组程序6-| |-(SBR1)8-| |-4#输入:I0.52组程序(SBR1)1#输入:I0.61组程序1-| |-(SBR2)1-| |-1#输入:I0.71组程序(SBR2)1#输入:I0.71组程序3-| |-(SBR2)5-| |-1#输入:I0.71组程序(SBR2)1#输入:I0.71组程序7-| |-(SBR2)2#输入:I1.02组程序1-| |-(SBR3)2#输入:I1.12组程序1-| |-(SBR3)3-| |-2#输入:I1.12组程序(SBR3)2#输入:I1.12组程序5-| |-(SBR3)7-| |-2#输入:I1.12组程序(SBR3):I1.21组程序5-| |-(SBR0)4-| |-:I1.21组程序(SBR2):I1.32组程序5-| |-(SBR1)4-| |-:I1.32组程序(SBR3):I1.41组程序6-| |-(SBR0)1-| |-:I1.51组程序(SBR0):I2.02组程序6-| |-(SBR1):I2.12组程序1-| |-(SBR1):I2.21组程序2-|/|-(SBR2):I2.21组程序5-|/|-(SBR2)6-| |-:I2.21组程序(SBR2):I2.21组程序7-| |-(SBR2):I2.2(SBR4)1-| |-2-| |-:I2.31组程序(SBR2):I2.31组程序5-| |-(SBR2)6-|/|-:I2.31组程序(SBR2)7-|/|-:I2.31组程序(SBR2):I2.3(SBR4)4-| |-:I2.42组程序2-|/|-(SBR3):I2.42组程序5-|/|-(SBR3):I2.42组程序6-| |-(SBR3)7-| |-:I2.42组程序(SBR3):I2.4(SBR4)7-| |-2-| |-:I2.52组程序(SBR3)5-| |-:I2.52组程序(SBR3):I2.52组程序6-|/|-(SBR3)7-|/|-:I2.52组程序(SBR3):I2.5(SBR4)10-| |-1-(R)1#输出 :Q0.0PLC编程实例(OB1)1#输出 :Q0.0PLC编程实例2-(R)(OB1)1-( )1#输出 :Q0.01组程序(SBR0)1#输出 :Q0.01组程序1-| |-(SBR0)6-|/|-1#输出 :Q0.01组程序(SBR0)1#输出 :Q0.01组程序2-( )(SBR2)2-| |-1#输出 :Q0.01组程序(SBR2)1#输出:Q0.1PLC编程实例1R) (隐含访问)(OB1)2R) (隐含访问) 1#输出:Q0.1PLC编程实例(OB1)1#输出:Q0.11组程序1-|/|-(SBR0)2-|/|-1#输出:Q0.11组程序(SBR0)1#输出:Q0.11组程序3-( )(SBR0)1#输出:Q0.11组程序3-| |-(SBR0)1#输出:Q0.11组程序2-|/|-(SBR2)(SBR2)5-( )1#输出:Q0.11组程序(SBR2)5-| |-1#输出:Q0.11组程序(SBR2)5-| |-1#输出:Q0.11组程序(SBR2)1R) (隐含访问) 2#输出:Q0.2PLC编程实例(OB1)2R) (隐含访问) 2#输出:Q0.2PLC编程实例(OB1)1-|/|-2#输出:Q0.21组程序(SBR0)6-( )2#输出:Q0.21组程序(SBR0)6-| |-2#输出:Q0.21组程序(SBR0)6-( )2#输出:Q0.21组程序(SBR2)2#输出:Q0.21组程序6-| |-(SBR2)1R) (隐含访问) 2#输出 :Q0.3PLC编程实例(OB1)2#输出 :Q0.3PLC编程实例2R) (隐含访问)(OB1)6-|/|-2#输出 :Q0.31组程序(SBR0)7-|/|-2#输出 :Q0.31组程序(SBR0)8-( )2#输出 :Q0.31组程序(SBR0)8-| |-2#输出 :Q0.31组程序(SBR0)3-|/|-2#输出 :Q0.31组程序(SBR2)2#输出 :Q0.31组程序6-|/|-(SBR2)7-( )2#输出 :Q0.31组程序(SBR2)2#输出 :Q0.31组程序7-| |-(SBR2)7-| |-2#输出 :Q0.31组程序(SBR2)3#输出:Q0.4PLC编程实例1R) (隐含访问)(OB1)2R) (隐含访问) 3#输出:Q0.4PLC编程实例(OB1)3#输出:Q0.42组程序1-( )(SBR1)1-| |-3#输出:Q0.42组程序(SBR1)3#输出:Q0.42组程序6-|/|-(SBR1)2-( )3#输出:Q0.42组程序(SBR3)3#输出:Q0.42组程序2-| |-(SBR3)1R) (隐含访问) 3#输出:Q0.5PLC编程实例(OB1)2R) (隐含访问) 3#输出:Q0.5PLC编程实例(OB1)(SBR1)2-|/|-3#输出:Q0.52组程序(SBR1)3-( )3#输出:Q0.52组程序(SBR1)3-| |-3#输出:Q0.52组程序(SBR1)3-| |-3#输出:Q0.52组程序(SBR1)2-|/|-3#输出:Q0.52组程序(SBR3)3-|/|-3#输出:Q0.52组程序(SBR3)5-( )3#输出:Q0.52组程序(SBR3)5-| |-3#输出:Q0.52组程序(SBR3)5-| |-3#输出:Q0.52组程序(SBR3)4#输出:Q0.6PLC编程实例1R) (隐含访问)(OB1)2R) (隐含访问) 4#输出:Q0.6PLC编程实例(OB1)4#输出:Q0.62组程序1-|/|-(SBR1)6-( )4#输出:Q0.62组程序(SBR1)6-| |-4#输出:Q0.62组程序(SBR1)6-( )4#输出:Q0.62组程序(SBR3)6-| |-4#输出:Q0.62组程序(SBR3)1R) (隐含访问) 4#输出:Q0.7PLC编程实例(OB1)4#输出:Q0.7PLC编程实例2R) (隐含访问)(OB1)6-|/|-4#输出:Q0.72组程序(SBR1)4#输出:Q0.72组程序7-|/|-(SBR1)8-( )4#输出:Q0.72组程序(SBR1)4#输出:Q0.72组程序8-| |-(SBR1)8-| |-4#输出:Q0.72组程序(SBR1)4#输出:Q0.72组程序3-|/|-(SBR3)6-|/|-4#输出:Q0.72组程序(SBR3)4#输出:Q0.72组程序7-( )(SBR3)7-| |-4#输出:Q0.72组程序(SBR3)4#输出:Q0.72组程序7-| |-(SBR3)1R) (隐含访问) 1启停输出:Q1.0PLC编程实例(OB1)2R) (隐含访问) 1启停输出:Q1.0PLC编程实例(OB1)1启停输出:Q1.01组程序4-( )(SBR0)3-( ) 1启停输出:Q1.01组程序(SBR2)1启停输出:Q1.01组程序3-| |-(SBR2)1R) (隐含访问) 2启停输出:Q1.1PLC编程实例(OB1)2启停输出:Q1.1PLC编程实例2R) (隐含访问)(OB1)2启停输出:Q1.12组程序4-( )(SBR1)2启停输出:Q1.12组程序3-( )(SBR3)3-| |-2启停输出:Q1.12组程序(SBR3)1故障输出:Q2.0(SBR4)1-( )1故障输出:Q2.0(SBR4)2-| |-2故障输出:Q2.1(SBR4)4-( )2故障输出:Q2.1(SBR4)5-| |-3故障输出:Q2.2(SBR4)7-( )3故障输出:Q2.2(SBR4)8-| |-4故障输出:Q2.3(SBR4)10-( )4故障输出:Q2.3(SBR4)11-| |-VW0(SBR4)3MOV_WVW2(SBR4)6MOV_WVW4(SBR4)9MOV_WVW6(SBR4)12MOV_W1-(R)M0.0PLC编程实例(OB1)M0.01组程序1-( )(SBR0)2-| |-M0.01组程序(SBR0)M0.1PLC编程实例1R) (隐含访问)(OB1)2-( )M0.11组程序(SBR0)2-| |-M0.11组程序(SBR0)4-| |-M0.11组程序(SBR0)1R) (隐含访问) M0.2PLC编程实例(OB1)3-| |-M0.21组程序(SBR0)5-( )M0.21组程序(SBR0)8-| |-M0.21组程序(SBR0)1R) (隐含访问) M0.3PLC编程实例(OB1)M0.4PLC编程实例1R) (隐含访问)(OB1)6-( )M0.41组程序(SBR0)M0.41组程序7-| |-(SBR0)1R) (隐含访问) M0.5PLC编程实例(OB1)4-| |-M0.51组程序(SBR0)M0.51组程序7-( )(SBR0)7-| |-M0.51组程序(SBR0)M0.6PLC编程实例1R) (隐含访问)(OB1)1R) (隐含访问) M0.7PLC编程实例(OB1)M1.0PLC编程实例1R) (隐含访问)(OB1)M1.02组程序1-( )(SBR1)M1.02组程序2-| |-(SBR1)1R) (隐含访问) M1.1PLC编程实例(OB1)M1.12组程序2-( )(SBR1)2-| |-M1.12组程序(SBR1)M1.12组程序4-| |-(SBR1)1R) (隐含访问) M1.2PLC编程实例(OB1)M1.22组程序3-| |-(SBR1)5-( )M1.22组程序(SBR1)M1.22组程序8-| |-(SBR1)1R) (隐含访问) M1.3PLC编程实例(OB1)M1.4PLC编程实例1R) (隐含访问)(OB1)M1.42组程序6-( )(SBR1)M1.42组程序7-| |-(SBR1)1R) (隐含访问) M1.5PLC编程实例(OB1)M1.52组程序4-| |-(SBR1)7-( )M1.52组程序(SBR1)M1.52组程序7-| |-(SBR1)1R) (隐含访问) M1.6PLC编程实例(OB1)M1.7PLC编程实例1R) (隐含访问)(OB1)2-(R)M3.0PLC编程实例(OB1)M3.01组程序1-( )(SBR2)1-| |-M3.01组程序(SBR2)M3.01组程序2-| |-(SBR2)M3.01组程序6-| |-(SBR2)M3.01组程序8-| |-(SBR2)M3.1PLC编程实例2R) (隐含访问)(OB1)2-( )M3.11组程序(SBR2)M3.11组程序3-| |-(SBR2)2R) (隐含访问) M3.2PLC编程实例(OB1)M3.21组程序4-( )(SBR2)M3.21组程序5-| |-(SBR2)M3.21组程序7-| |-(SBR2)2R) (隐含访问) M3.3PLC编程实例(OB1)M3.31组程序2-|/|-(SBR2)2R) (隐含访问) M3.4PLC编程实例(OB1)M3.5PLC编程实例2R) (隐含访问)(OB1)2R) (隐含访问) M3.6PLC编程实例(OB1)M3.7PLC编程实例2R) (隐含访问)(OB1)2R) (隐含访问) M4.0PLC编程实例(OB1)M4.01组程序3-| |-(SBR2)6-( )M4.01组程序(SBR2)M4.1PLC编程实例2R) (隐含访问)(OB1)M4.11组程序6-|/|-(SBR2)M4.2PLC编程实例2R) (隐含访问)(OB1)2-|/|-M4.21组程序(SBR2)M4.21组程序5-|/|-(SBR2)6-| |-M4.21组程序(SBR2)M4.21组程序7-| |-(SBR2)9-( )M4.21组程序(SBR2)M4.3PLC编程实例2R) (隐含访问)(OB1)2R) (隐含访问) M4.4PLC编程实例(OB1)M4.5PLC编程实例2R) (隐含访问)(OB1)2R) (隐含访问) M4.6PLC编程实例(OB1)M4.7PLC编程实例2R) (隐含访问)(OB1)M5.0PLC编程实例2R) (隐含访问)(OB1)M5.02组程序1-( )(SBR3)M5.02组程序1-| |-(SBR3)2-| |-M5.02组程序(SBR3)M5.02组程序6-| |-(SBR3)8-| |-M5.02组程序(SBR3)M5.1PLC编程实例2R) (隐含访问)(OB1)M5.12组程序2-( )(SBR3)M5.12组程序3-| |-(SBR3)2R) (隐含访问) M5.2PLC编程实例(OB1)M5.22组程序4-( )(SBR3)5-| |-M5.22组程序(SBR3)M5.22组程序7-| |-(SBR3)2R) (隐含访问) M5.3PLC编程实例(OB1)M5.32组程序2-|/|-(SBR3)2R) (隐含访问) M5.4PLC编程实例(OB1)M5.5PLC编程实例2R) (隐含访问)(OB1)2R) (隐含访问) M5.6PLC编程实例(OB1)M5.7PLC编程实例2R) (隐含访问)(OB1)M6.0PLC编程实例2R) (隐含访问)(OB1)M6.02组程序3-| |-(SBR3)6-( )M6.02组程序(SBR3)M6.1PLC编程实例2R) (隐含访问)(OB1)6-|/|-M6.12组程序(SBR3)M6.2PLC编程实例2R) (隐含访问)(OB1)2-|/|-M6.22组程序(SBR3)M6.22组程序5-|/|-(SBR3)6-| |-M6.22组程序(SBR3)M6.22组程序7-| |-(SBR3)9-( )M6.22组程序(SBR3)M6.3PLC编程实例2R) (隐含访问)(OB1)M6.4PLC编程实例2R) (隐含访问)(OB1)M6.5PLC编程实例2R) (隐含访问)(OB1)M6.6PLC编程实例2R) (隐含访问)(OB1)2R) (隐含访问) M6.7PLC编程实例(OB1)M7.0PLC编程实例2R) (隐含访问)(OB1)2R) (隐含访问) M7.1PLC编程实例(OB1)M7.2PLC编程实例2R) (隐含访问)(OB1)M7.3PLC编程实例2R) (隐含访问)(OB1)M7.4PLC编程实例2R) (隐含访问)(OB1)2R) (隐含访问) M7.5PLC编程实例(OB1)M7.6PLC编程实例2R) (隐含访问)(OB1)2R) (隐含访问) M7.7PLC编程实例(OB1)M8.0PLC编程实例2R) (隐含访问)(OB1)2R) (隐含访问) M8.1PLC编程实例(OB1)M8.2PLC编程实例2R) (隐含访问)(OB1)2R) (隐含访问) M8.3PLC编程实例(OB1)2R) (隐含访问) M8.4PLC编程实例(OB1)M8.5PLC编程实例2R) (隐含访问)(OB1)2R) (隐含访问) M8.6PLC编程实例(OB1)2R) (隐含访问) M8.7PLC编程实例(OB1)8CTUC01组程序(SBR2)8-| |-C01组程序(SBR2)9-|==I|-C01组程序(SBR2)8CTUC12组程序(SBR3)8-| |-C12组程序(SBR3)9-|==I|-C12组程序(SBR3)C5(SBR4)2CTUC5(SBR4)2-| |-C5(SBR4)3MOV_WC6(SBR4)5CTUC6(SBR4)5-| |-C6(SBR4)6MOV_WC7(SBR4)8CTUC7(SBR4)8-| |-C7(SBR4)9MOV_WC8(SBR4)11CTUC8(SBR4)11-| |-C8(SBR4)12MOV_W4-|/|-T1011组程序(SBR0)T1021组程序4-|/|-(SBR0)3TOFT1112组程序(SBR1)T1122组程序8TOF(SBR1)T1211组程序2-|/|-(SBR2)5TOFT1211组程序(SBR2)6-|/|-T1211组程序(SBR2)2-|/|-T1221组程序(SBR2)6-|/|-T1221组程序(SBR2)T1221组程序7TOF(SBR2)2-|/|-T1312组程序(SBR3)T1312组程序5TOF(SBR3)6-|/|-T1312组程序(SBR3)2-|/|-T1322组程序(SBR3)T1322组程序6-|/|-(SBR3)7TOFT1322组程序(SBR3)SM0.0PLC编程实例3-| |-(OB1)8-| |-SM0.01组程序(SBR2)8-| |-SM0.02组程序(SBR3)SM0.0(SBR4)3-| |-SM0.0(SBR4)6-| |-SM0.0(SBR4)9-| |-SM0.0(SBR4)12-| |-字节9876543210 VB0..W W W W W W W W MB0.b b b b b b.b b C0.X X X X...X X T0.......... T10.......... T20.......... T30.......... T40.......... T50.......... T60.......... T70.......... T80.......... T90.......... T100.......X X. T110.......X X. T120.......X X. T130.......X X. SMB0.........b位76543210 I0.0b b b b b b b b I1.0..b b b b b b I2.0..b b b b b b Q0.0b b b b b b b b Q1.0......b b Q2.0....b b b b M0.0b b b b b b b b M1.0b b b b b b b b M2.0........ M3.0b b b b b b b b M4.0b b b b b b b b M5.0b b b b b b b b M6.0b b b b b b b b M7.0b b b b b b b b M8.0b b b b b b b b。