基于MATLAB的模糊PID-Smith控制器的设计与仿真
基于MATLAB模糊自适应PID 控制器的设计
基于MATLAB模糊自适应PID 控制器的设计The fuzzy PID controller and‘its simulation Abstract:This paper discusses the design of fuzzy PID controller and he method of realization using MATLAB software.The result of simulation in MATLAB/Simulink indicates that the controlle r evidently improves the dynamic property of control system.The controlle r is easily realized and applied in engineering.First, let's take a look at how the PID controller works in variable (e) represents the tracking error, the difference between the desired input value (R) and the actual output (Y). This error signal (e) will be sent to the PID controller, and the controller computes both the derivative and the integral of this error signal. The signal (u) just past the controller is now equal to the proportional gain (Kp) times the magnitude of the error plus the integral gain (Ki) times the integral of the error plus the derivative gain (Kd) times the derivativeof the error.摘要: 基于模糊自适应控制理论, 设计了一种模糊自适应PID 控制器, 具体介绍了这种PID 控制器的控制特点及参数设计规则, 实现PID 控制器的在线自整摘要: 基于模糊自适应控制理论, 设计了一种模糊自适应PID 控制器, 具体介绍了这种PID 控制器的控制特点及参数设计规则, 实现PID 控制器的在线自整定和自调整。
基于MATLAB的模糊自整定PID参数控制器的设计与仿真

2模糊自整定PID参数控制策略与 整定原则
杨咏梅:硕士研究生
国家自然科学基金资助项目(G0501080160302001) 电话:010-62132436.62192616(T/F)
4模糊自整定PID参数控制系统仿真
0
0.5
I.0
1 5 20
25
30
(2)输出KP、KI、KD的隶属函数曲线
图2隶属函数曲线图
(3)模糊控制规则表
根据上述的PID参数整定原则及专家经验,可以
列出输出变量KP、KI、KD的控制规则如表1-3所
示。 3.2模糊控制器的编辑
在SIMULINK环境对图1所示的模糊自整定PID 参数控制系统编辑,得到如图3所示的系统仿真框 图。在系统仿真时,我们选择被控对象的传递函数为: G(s)=l/(2Sz+3s+1)。然后按SIMUL]NK仿真的正确步骤 选择计算步长、模拟示波器X/Y轴参数等进行仿真运 算。
b模糊控制器的控制规则对模糊自整定PID参数 控制系统中的参数影响较大。这将直接影响系统的调 节效果.应对模糊控制器的FIS规则语句的权值和控 制规则表作适当的修改和调整。
图4 PID控制系统响应曲线 图5模糊自整定PID参数控制系统响应曲线
c.采用Fuzzy和PID复合控制的算法,系统的响 应速度加快、调节精度提高、稳态性能变好,而且没有 超调和振荡.具有较强的鲁棒性。这是单纯的PID控 制难以实现的,它的一个显著特点就是在同样精度要 求下,系统的过渡时间变短,这在实际的过程控制中 将有重大的意义。
基于Matlab的模糊PID控制器设计与仿真研究

一、预案编制目的为提高本地区应对台风灾害的应急能力,确保人民群众生命财产安全,根据《中华人民共和国防台防汛法》和《XX省防台防汛应急预案》,结合本地区实际情况,特制定本预案。
二、适用范围本预案适用于本地区范围内发生的台风灾害应急响应和处置工作。
三、组织机构及职责1. 成立防台应急指挥部,负责全面领导、指挥、协调和监督防台应急工作。
2. 防台应急指挥部下设以下工作组:(1)综合协调组:负责协调各相关部门、单位,确保防台应急工作顺利开展。
(2)监测预警组:负责收集、分析、报告台风动态,发布预警信息。
(3)抢险救援组:负责组织、协调、指挥抢险救援行动。
(4)转移安置组:负责组织、协调、指挥受灾群众转移安置工作。
(5)物资保障组:负责物资储备、调拨、供应等工作。
(6)宣传报道组:负责宣传报道防台应急工作,提高公众防台意识。
四、应急响应等级根据台风灾害的严重程度和影响范围,将应急响应分为四个等级:1. 级别Ⅰ(特别重大):台风登陆,造成严重影响,可能导致重大人员伤亡和财产损失。
2. 级别Ⅱ(重大):台风登陆,造成严重影响,可能导致较大人员伤亡和财产损失。
3. 级别Ⅲ(较大):台风登陆,造成一定影响,可能导致人员伤亡和财产损失。
4. 级别Ⅳ(一般):台风登陆,造成一定影响,可能导致财产损失。
五、应急响应措施1. 级别Ⅰ、Ⅱ应急响应措施:(1)立即启动防台应急响应,启动本预案。
(2)各级领导带队深入一线,检查指导防台应急工作。
(3)发布台风红色预警信息,组织转移受灾群众。
(4)抢险救援组迅速组织力量,开展抢险救援行动。
(5)物资保障组全力保障抢险救援物资供应。
(6)宣传报道组及时报道防台应急工作情况。
2. 级别Ⅲ、Ⅳ应急响应措施:(1)启动防台应急响应,启动本预案。
(2)各级领导带队检查指导防台应急工作。
(3)发布台风橙色、黄色预警信息,加强监测预警。
(4)组织力量,开展抢险救援行动。
(5)物资保障组做好物资储备和调拨工作。
基于MATLAB的模糊PID控制器的设计

1课题背景、意义及发展现状随着越来越多的新型自动控制应用于实践,其控制理论的发展也经历了经典控制理论、现代控制理论和智能控制理论三个阶段。
智能控制的典型实例是模糊全自动洗衣机。
自动控制系统可分为开环控制系统和闭环控制系统。
一个控制系统包括控制器、传感器、变送器、执行机构、输入输出接口。
控制器的输出经过输出接口、执行机构加到被控系统上;控制系统的被控量,经过传感器、变送器通过输入接口送到控制器。
不同的控制系统,传感器、变送器、执行机构是不一样的。
比如压力控制系统要采用压力传感器;电加热控制系统要采用温度传感器[1]。
目前,PID控制及其控制器或智能PID控制器(仪表)已经很多,产品已在工程实际中得到了广泛的应用。
比如,工业生产过程中,对于生产装置的温度、压力、流量、液位等工艺变量常常要求维持在一定的数值上,或按一定的规律变化,以满足生产工艺的要求[2]。
PID控制器可以根据PID控制原理对整个控制系统进行偏差调节,从而使被控变量的实际值与工艺要求的预定值一致。
PID(比例积分微分)控制具有结构简单、稳定性能好、可靠性高等优点,尤其适用于可建立精确数学模型的控制系统。
而对于一些多变量、非线性、时滞的系统,传统的PID控制器并不能达到预期的效果。
随着模糊数学的发展,模糊控制的思想逐渐得到控制工程师们的重视,各种模糊控制器也应运而生。
而单纯的模糊控制器有其自身的缺陷—控制效果很粗糙、控制精度无法达到预期标准。
但利用传统的PID控制器和模糊控制器结合形成的模糊自适应的PID控制器可以弥补其缺陷;它将系统对应的误差和误差变化率反馈给模糊控制器进而确定相关参数,保证系统工作在最佳状态,实现优良的控制效果[3]。
- 5 -1.模糊PID控制器的设计1.1模糊PID控制器的工作原理模糊PID控制器是以操作人员手动控制经验总结出的控制规则为核心,通过辨识系统当前的运行状态;经过模糊推理,模糊判决,解模糊过程得到确定的控制量以实现对被控对象的在线控制。
模糊_PID控制的MATLAB仿真分析

图 4 PID 和模糊 PID 响应曲线
参考资料 [1]舒进.电液比例控制多轮独立转向技术研究:[博士学位论 文]. 北京:北京理工大学,2004 [2]陈丽兰.模糊 PID 控制器的控制策略研究.煤矿自动化, 2001.2 :1 3 - 1 4 [3]周恩涛,廖生行,牟丹.电液比例阀控系统模糊 -PID 控 制的研究.机床与液压,2003.16 :225-227 [4]张颖超,郭姝梅. MATLAB 及其在模糊控制系统仿真 中的应用. 系统仿真学报,2 0 0 1 . 1 1 :3 1 9 - 3 2 0 ,3 2 6 [5]储岳中,陶永华. 基于 MATLAB 的自适应模糊 PID 控 制系统计算机仿真. 安徽工业大学学报,2 0 0 1 . 1 :4 9 - 5 2 [6]朱摩西 .模糊 PID 控制器,工业控制计算机,1996.3: 19-20
2.2成孔与清孔质量控制 2.2.1 孔的垂直度控制 在准确放样后进行护筒埋设,在护筒上口作好桩中心标记 以便钻机对中。钻机对中过程中,应注意钻机底座的水平问 题。底座本身即与水平面不平行,致使钻杆夹具无法保持水 平,引起钻杆的不垂直,从而影响灌注桩的垂直性,尽管此 时钻头中心与护筒所标设的桩中心重合,而实际桩位已偏斜。 因此在对位及钻孔过程中,均应观测调整钻机的水平和垂直 度。在施工过程中,监理应随时注意观察钻杆的垂直度情况。 2.2.2 入岩和终孔 入岩和终孔是影响钻孔灌注桩承载力的重要因素。实际操
1.3 偏差变化 EC 的大小表明偏差变化的速率,EC 越大,KP 取值越小,KI 取值越大,反之亦然。
1.4 微分作用类似于人的预见性,它阻止偏差的变化,有 助于减小超调,克服振荡,使系统趋于稳定,加快系统的动 作速度,减小调整时间,改善系统的动态性能。因此,在 E 较大时,K D 取零,实际为 P I 控制;在 E 较小时,K D 取一 正直,实行 P I D 控制。
基于MATLAB的模糊PID控制器设计与仿真研究
35
万方数据
机 车 电 传 动 2002年
2002 年第 5期 2002 年9 月10 日
机车电传动 ELECTRIC DRIVE FOR LOCOMOTIVES
基于M A T L A B 的模糊P I D 控制器
研 究
设计与仿真研究
开
发
常满波 胡鹏飞
西南交通大学 电气工程学院 四川 成都 610031
摘 要 针对在复杂系统中实现自组织参数的 P I D 控制问题 介绍了一种基于模糊控制原 理的 P I D 参数自组织控制器的设计方案 同时利用 M A T L A B 中的 S I M U L I N K 和 F U Z Z Y 工具箱 进行了仿真研究 仿真结果表明 参数自组织模糊控制系统比参数固定的系统的控制效果好
关键词 P I D 控制器 M A T L A B 模糊控制 仿真 中图分类号 TP391.9 文献标识码 A 文章编号 1000-128X(2002)05-0034-03
5 ,2002 Sep. 10,2002
作者简介 常满波 1976- 男 西南交通大学电气工 程学院硕士研究生 主要 从事计算机应用技术的研 究
图8 G1(s)仿真结果
图9 G2(s)仿真结果
过程 G1(s)
G2(s)
表2 仿真结果分析
常规PID控制
Kp=2.81 Ki=1.64 Kd=0.41
YOS=18.7% TS=4.38 s
Kp=0.95 Ki=1.03 Kd=0.26
YOS=33.2% TS=7.33 s
设被控对象的数学模型为
图 4 Kp K i D d 的隶属函数
根据以上分析和语言变量的设定 可以总结出 Kp K i 和 K d 的自调整控制规则 见表 1
基于MATLAB的模糊PID-Smith控制器的设计与仿真
基于MATLAB的模糊PID-Smith控制器的设计与仿真作者:李静周德俭刘电霆刘亮来源:《软件导刊》2011年第05期摘要:针对工业控制中大惯性、纯滞后、参数时变非线性受控对象难于控制问题,结合Smith预估算法能有效克服纯滞后、模糊控制鲁棒性较强以及PID控制稳态精度高这三者的优点,提出了一种模糊控制器的设计方法,并将其应用于电机网络控制系统中。
MATLAB仿真结果表明,新的控制方案与传统的Smith控制器、控制器相比,不仅具有满意的控制性能,而且具有较强鲁棒性和抗干扰性能,稳态精度高,对时变滞后对象具有良好的控制效果。
关键词:网络控制系统;纯滞后;模糊PID;Smith控制;模糊控制器中图分类号:TP273\++.4 文献标识码:A 文章编号:(2011)基金项目:广西研究生教育创新计划基金项目(2009105960811M14)0 引言PID控制是一种典型的传统反馈控制器,具有结构简单、鲁棒性好和易于实现等优点,被广泛地应用于工业过程控制。
在网络化控制系统中,传统PID控制器的参数的调整对被控对象的数学模型依赖较大,并且控制过程中的滞后性、控制参数的非线性和高阶性也增加了对控制参数的调整难度。
而模糊控制系统正是由于它不依赖于工业对象模型,具有较强的鲁棒性,近年来被广泛的应用到网络化控制系统领域。
本文在模糊控制的基础上,结合传统的Smith 控制对时滞过程控制的有效性,提出了模糊控制方案,并对直流伺服电机控制系统进行实例仿真分析,证明了该方案的有效性。
1 模糊PID控制器的设计1.1 模糊PID控制器PID参数模糊自整定是在常规PID控制的基础上,应用模糊集合理论建立参数K\-p、K\-i、K\-d与偏差e和偏差变化率ec间的函数关系。
其结构图如图1所示。
参数\-p、K\-i、K\-d与偏差e和偏差变化率ec间的函数关系如下:K\-p= K′\- p+ΔK\-p= K′\-p+{e,ec }\-K\-i = K′\-i+ΔK\-i= K′\-i+{e,ec }\-K\-d= K ′\-d+ΔK\-d= K′\-d+{e,ec }\-其中,K′\-p,K′\-i,K′\-为控制器的预整定值,\-,\-,\-d为参数的修正值。
基于MATLAB的模糊PID-Smith控制器的设计与仿真
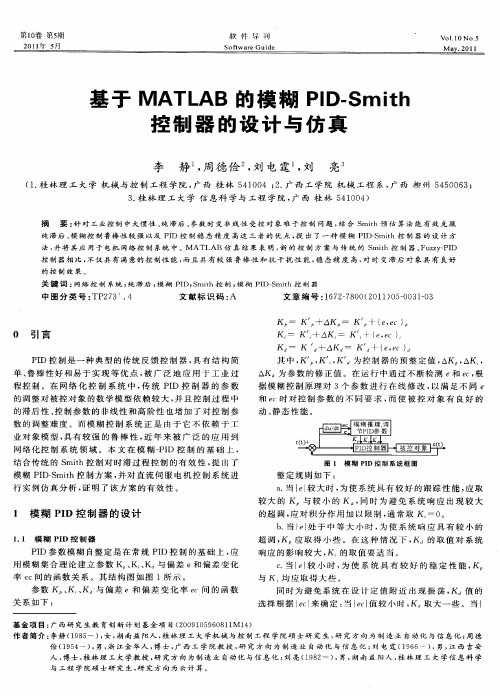
图 l
模 糊 PI 控 制 系 统 框 图 D
整定规则如下 :
a 当 l 大 时 , . J e较 为使 系 统 具 有 较 好 的 跟 踪 性 能 , 取 应 较 大 的 K 与 较 小 的 K , 时 为 避 免 系 统 响 应 出 现 较 大 同
1 模 糊 P D控 制 器 的 设 计 I
纯 滞 后 、 糊 控 制 鲁 棒 性 较 强 以 及 P D 控 制 稳 态 精 度 高 这 三 者 的优 点 , 出 了一 种 模 糊 P 【 S t 模 I 提 I _ mi ) h控 制 器 的 设 计 方 法 , 将 其 应 用 于 电机 网络 控 制 系统 中 。MA A 并 TL B仿 真 结 果 表 明 , 的 控 制 方 案 与 传 统 的 S t 新 mi h控 制 器 、 u z- I F zy P D
P D控 制 是 一 种 典 型 的 传 统 反 馈 控 制 器 , 有 结 构 简 I 具 单 、 棒 性 好 和 易 于 实 现 等 优 点 , 广 泛 地 应 用 于 工 业 过 鲁 被
程 控 制 。在 网 络 化 控 制 系 统 中 , 统 P D 控 制 器 的 参 数 传 I
的 调 整 对 被 控 对 象 的 数 学 模 型 依 赖 较 大 , 且 控 制 过 程 中 并
L —— 吉 . 疆两泵 . . . ! .
.
结合 传 统 的 S t 制 对 时 滞 过 程 控 制 的 有 效 性 , 出 了 mi h控 提
模 糊 P D-mi I S t h控 制方 案 , 对 直 流 伺 服 电 机 控 制 系 统 进 并 行 实 例仿 真 分 析 , 明 了 该 方 案 的有 效 性 。 证
3桂 林 理 工大 学 信 息科 学与 工程 学 院 , 西 桂 林 5 10 ) . 广 4 0 4
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于MATLAB的模糊PID-Smith控制器的设计与仿真
摘要:针对工业控制中大惯性、纯滞后、参数时变非线性受控对象难于控制问题,结合Smith预估算法能有效克服纯滞后、模糊控制鲁棒性较强以及PID控制稳态精度高这三者的优点,提出了一种模糊PID Smith控制器的设计方法,并将其应用于电机网络控制系统中。
MATLAB仿真结果表明,新的控制方案与传统的Smith控制器、Fuzzy PID控制器相比,不仅具有满意的控制性能,而且具有较强鲁棒性和抗干扰性能,稳态精度高,对时变滞后对象具有良好的控制效果。
关键词:网络控制系统;纯滞后;模糊PID;Smith控制;模糊PID Smith控制器
0 引言
PID控制是一种典型的传统反馈控制器,具有结构简单、鲁棒性好和易于实现等优点,被广泛地应用于工业过程控制。
在网络化控制系统中,传统PID控制器的参数的调整对被控对象的数学模型依赖较大,并且控制过程中的滞后性、控制参数的非线性和高阶性也增加了对控制参数的调整难度。
而模糊控制系统正是由于它不依赖于工业对象模型,具有较强的鲁棒性,近年来被广泛的应用到网络化控制系统领域。
本文在模糊PID控制的基础
上,结合传统的Smith控制对时滞过程控制的有效性,提出了模糊PID Smith控制方案,并对直流伺服电机控制系统进行实例仿真分析,证明了该方案的有效性。
1 模糊PID控制器的设计
1.1 模糊PID控制器
PID参数模糊自整定是在常规PID控制的基础上,应用模糊集合理论建立参数K\-p、K\-i、K\-d与偏差e和偏差变化率ec 间的函数关系。
其结构图如图1所示。
参数K\-p、K\-i、K\-d与偏差e和偏差变化率ec间的函数关系如下:
K\-p= K′\- p+ΔK\-p= K′\-p+{e,ec }\-p
K\-i = K′\-i+ΔK\-i= K′\-i+{e,ec }\-i
K\-d= K ′\-d+ΔK\-d= K′\-d+{e,ec }\-d
其中,K′\-p,K′\-i,K′\-dΔK\-pΔK\-iΔK\-d为参数的修正值。
在运行中通过不断检测e和ec,根据模糊控制原理对3个参数进行在线修改,以满足不同e和ec
整定规则如下:
a.当|e|较大时,为使系统具有较好的跟踪性能,应取较大的K\-p与较小的K\-d,同时为避免系统响应出现较大的超调,应对积分作用加以限制,通常取K\-i=0
b.当|e|处于中等大小时,为使系统响应具有较小的超调,
K\-p应取得小些。
在这种情况下,K\-d的取值对系统响应的影响较大,K\-i
c.当|e|较小时,为使系统具有较好的稳定性能,K\-p与K\-i均应取得大些。
同时为避免系统在设计定值附近出现振荡,K\-d值的选择根据|ec|来确定:当|ec|值较小时,K\-d取大一些。
当|ec|值较大时,K\-d取较小值,通常K\-d
1.2 模糊论域及隶属函数的选取
模糊控制器采用两输入,三输出结构。
输入变量为误差E及误差的变化EC,输出变量为ΔK\-p,ΔK\-i,ΔK\-d。
各语言变量的语言值均为:{负大,负中,负小,零,正小,正中,正大},记为{NB,NM,NS,ZO,PS,PM,PB}{-6,+6}。
三角形隶属函数计算简单、控制性能好,本文输入输出量均采用三角形隶属函数。
1.3 模糊控制规则的选取
模糊控制规则选取的基本原则是当误差大或较大时,选择控制量以尽快消除误差为主;当误差较小时,选择控制量要防止超调,以满足控制精度为主要出发点。
根据这一原则制定一系列的控制规则,并结合直流电机位置伺服系统的调节特点,将这些控制的规则汇总为表,就得到了表1—3的模糊控制规则表。
2 Smith预估控制
Smith预估控制对于时滞系统具有良好的控制作用,它在估计对象动态特性的基础上,用一个预估模型进行补偿,从而得到一个没有时滞的被调节量反馈到控制器。
Smith预估控制最大的优点是将时滞环节移到了闭环之外,最大的缺点是过分依赖精确的数学模型。
设PID控制器传递函数为Gc(s)Smith预估补偿控制系统结构如图4所示:
可见,加入Smith预估补偿控制器后,可等效看成把被控对象的纯滞后部分e\+\{-τs\}和其线性部分G\-o(s)分开,并移到闭环系统之外,对输出C(s)的控制转换为对C′(s)的控制,从根本
利用Smith控制能克服延迟的影响的有效性,考虑到模糊控制具有对被控对象模型参数变化不敏感的优点,以及PID控制器
的参数应该对系统的参数变化具有自适应能力,可将模糊控制与Smith控制方法结合起来,能极大的提高控制性能。
3 仿真研究
本文选取的被控对象为直流电机,其等效的二阶系统为:
G(s)= 32[]s(0.1s+1),输1,仿真时间为50s。
在MATLAB命令窗口运行Fuzzy函数进入模糊逻辑编辑器,并建立一个新的FIS文件,选择控制器类型Mamdani型,根据上面的分析分别输入E、EC、KP、KI、KD
化区间,以If……then的形式输入模糊控制规则。
取与(and)的方法为min,或(or)的方法为max,推理(implication)方法为min,合成(aggre gatin)方法为max,非模糊化(defuzzification)方法为重心平均(centroid)。
图中1代表Smith控制,2代表模糊PID控制,3代表模糊PID Smith控制。
通过性能指标的比较,3种控制方法中,模糊PID Smith 控制方法较其他两种方法体现出优良的控制性能,响应相应较快,调节时间短,能迅速达到平衡状态,并且超调量得到了有效的控制。
在30s时,给系统加入一个幅值为0.1的阶跃扰动。
在脉冲扰动的作用下,模糊PID Smith控制方法表现出较好的动态性能,有较好的抗干扰能力。
时滞常数τ分别为5s、15s、25s时,模糊PID Smith 控制系统响应曲线如图11所示。
模糊PID-Smith控制系统在时滞常数变化时,系统的响应曲线形状基本没有变化。
可以看出,模糊PID Smith控制系统对参数的变化适应能力强,鲁棒性较好。
4 结束语
通过对不同的控制方法进行仿真分析,证明了采用模糊PID Smith控制方法可以改善系统的控制品质,提高其动态性能指标。
模糊PID控制与Smith 预估补偿控制的结合兼顾了两者的优点,不仅有效地解决网络控制系统中时滞的问题,而且有效地改善Smith 预估补偿器对对象模型和网络时延的精确性要求以及网络控制系统的时延随机不确定性之间的矛盾,使整个系统的鲁棒性得到极大的提高,为解决网络控制中的时延与不确定性参数变化问题提供了一条有效的途径。
参考文献:
\[1\] 郭阳宽,王正林.过程控制工程及仿真\[M\].北京:电子工业出版社,2009.
\[2\] 刘金琨.先进PID控制MA TLAB仿真\[M\].北京:电子工业出版社,2004.
\[3\] 李楠,孟庆春,付晓峰.基于参数自整定模糊PID控制策略的电机模型仿真研究\[J\].机电工程技术,2004(9).
\[4\] 张平,苑明哲,王宏.大时滞系统自适应模Smith控制\[J\].计算机仿真,2006(9).
\[5\] 杨咏梅,陈宁.基于MATLAB的模糊自整定PID参数控制器的设计与仿真\[J\].微计算机信息,2005(12).
\[6\] 雷霞,李晓光,尹振红.基于Sugeno推理自调整模糊Smith-PID控制器仿真研究\[J\].系统仿真学报,2008(18).
Design and Simulation of Fuzzy PID Smith Controller Based on MATLAB
Abstract:For the large inertia,delay,non linear time varying parameters of the controlled objects which are difficult to control in industrial control,combined with the three advantages of Smith predictor algorithm can overcome the delay effectively,fuzzy control' strong robustnss and the high steady state accuracy of PID control,proposed a fuzzy PID Smith controller design method,and applied to network control system of motor.MATLAB simulation
results show that compared to with the traditional Smith controller and Fuzzy PID controller,the new control scheme not only has satisfactory control performance,but also has strong robustness and anti jamming performance,this kind of method 's accuracy of the steady state is high and has good control effect on time variable delay objects.
Key Words:Network Control System;Delay;Fuzzy PID;Smith Control ;Fuzzy PID Smith Controller。