双目立体视觉之原理揭秘
双目视觉定位原理
双目视觉定位原理双目视觉定位原理是一种常见的视觉定位原理,它是通过两个摄像头同时拍摄同一个物体的不同角度,再通过计算机图像处理技术将这些图像进行分析处理,从而确定目标物体的位置、大小、形态等信息。
这种技术被广泛应用于机器人、无人机、自动驾驶汽车等领域,它的基本原理是通过双目视觉模拟人类眼睛的立体视觉效果,以实现对目标物体的快速准确识别和定位。
双目视觉定位原理的基本原理双目视觉定位原理的基本原理是通过两个摄像头同时拍摄同一个物体的不同角度,再通过计算机图像处理技术将这些图像进行分析处理,从而确定目标物体的位置、大小、形态等信息。
双目视觉定位系统主要由两个摄像头、镜头、图像采集卡、图像处理器和计算机组成。
其中,两个摄像头被安装在一定距离的位置上,一般是左右两侧,成为双目视觉系统。
当目标物体出现在两个摄像头的视野中时,它将在两个摄像头的图像中分别呈现出不同的位置和角度。
计算机会对这些图像进行分析处理,通过计算两个图像之间的差异,确定目标物体的位置、大小、形态等信息,从而实现对目标物体的快速准确定位。
双目视觉定位原理的优势双目视觉定位原理相比其他定位原理具有以下优势:1.快速准确:双目视觉定位原理可以在短时间内快速准确地识别和定位目标物体,适用于高速运动物体的定位。
2.适应性强:双目视觉定位原理可以适应不同环境和光照条件下的定位需求,具有较高的灵活性和适应性。
3.精度高:双目视觉定位原理可以实现毫米级别的定位精度,可以满足高精度定位需求。
4.成本低:双目视觉定位原理不需要复杂的设备和技术,成本相对较低,适用于大规模应用。
双目视觉定位原理的应用领域双目视觉定位原理可以广泛应用于机器人、无人机、自动驾驶汽车等领域。
在机器人领域中,双目视觉定位原理可以用于机器人的自主导航、目标跟踪、障碍物避免等方面;在无人机领域中,双目视觉定位原理可以用于无人机的目标搜索、跟踪、拍摄等任务;在自动驾驶汽车领域中,双目视觉定位原理可以用于车辆的自主导航、障碍物检测、停车等方面。
双目立体视觉技术的实现

双目立体视觉技术的实现双目立体视觉技术是指利用两个摄像机模拟人眼双目视觉,从而实现对物体的立体感知和深度信息的提取。
它已经广泛应用于计算机视觉、机器人视觉、虚拟现实、医学影像等领域。
本文将对双目立体视觉技术的实现进行详细介绍。
一、双目视觉原理人类双目视觉的原理是指两只眼睛在不同的位置观察同一物体,从而产生两个稍微不同的图像。
人脑通过类似于计算机中的算法,对两个图像进行计算,从而提取出立体信息,进而对物体进行深度和空间感知。
二、双目立体视觉技术的实现过程1.摄像机的标定由于摄像机内外参数不同,因此在使用双目立体视觉技术时需要先进行摄像机标定。
摄像机标定的过程包括对摄像机的内部参数和外部参数进行测量和计算。
内部参数包括焦距、主点以及径向和切向畸变等,外部参数包括相机的位置和朝向。
通过标定,可以得到摄像机的参数,进而进行后续的处理。
2.图像匹配图像匹配是双目立体视觉技术中最重要的步骤之一,也是最具挑战性的部分。
图像匹配的目的是找到两张图像中对应的像素点。
常用的图像匹配算法包括基于区域、基于特征和基于深度等。
3.深度计算深度计算是指根据匹配到的像素点,计算出物体的距离,即深度。
常用的深度计算方法包括三角测量法和基于视差的深度计算法。
三角测量法是指根据两个图像中对应像素点的位置关系,通过三角形相似原理计算出物体的距离。
基于视差的深度计算法是指通过计算两幅图像中对应点之间的视差(即两个像素在图像上的水平或垂直距离),从而得出物体到相机的距离。
三、双目立体视觉技术的应用1.计算机视觉双目立体视觉技术在计算机视觉领域中已经被广泛应用。
例如,在物体识别、位姿估计以及场景重建等方面,双目立体视觉技术都有重要的应用。
通过双目视觉,计算机可以更加准确地识别图像中的物体,进而进行自动化的控制和处理。
2.机器人视觉机器人视觉是指将双目视觉技术应用于机器人的感知和控制。
例如,在自主导航、抓取和操纵等方面,机器人需要通过视觉来获取场景信息和深度信息,从而实现自主决策和控制。
双目立体视觉原理
双目立体视觉原理双目立体视觉是指人类通过两只眼睛同时观察同一物体时产生的立体效果。
这种视觉原理是人类视觉系统中非常重要的一部分,它使我们能够感知到物体的深度和距离,为我们的日常生活和工作提供了重要的信息。
在本文中,我们将深入探讨双目立体视觉的原理和应用。
首先,双目立体视觉的原理是基于人类两只眼睛的位置差异而产生的。
由于两只眼睛分别位于头部的两侧,它们所看到的同一物体会有微小的差异。
这种差异包括视差、视角和视线方向等,这些差异为我们的大脑提供了丰富的信息,使我们能够感知到物体的深度和距离。
其次,双目立体视觉的原理还涉及到视觉系统的处理过程。
当两只眼睛同时观察同一物体时,它们所接收到的图像会被传送到大脑的视觉皮层进行处理。
在这个过程中,大脑会将两只眼睛接收到的信息进行比对和整合,从而产生立体效果。
这种比对和整合的过程是非常复杂的,它涉及到大脑的神经元网络和神经递质的作用,是一个高度精密的生物信息处理过程。
另外,双目立体视觉的原理还与人类的视觉经验和学习有关。
通过长期的视觉训练和经验积累,人类能够更加准确地感知物体的深度和距离。
这种经验和学习会影响到我们的视觉系统的发育和功能,使我们能够更加灵活地应对各种复杂的立体环境。
在实际应用中,双目立体视觉原理被广泛应用于计算机视觉、虚拟现实、医学影像等领域。
通过模拟人类的双目立体视觉原理,计算机可以实现立体图像的获取、处理和显示,从而实现立体视觉效果。
在虚拟现实技术中,双目立体视觉原理可以为用户提供更加逼真的虚拟体验,增强沉浸感和真实感。
在医学影像领域,双目立体视觉原理可以帮助医生更加准确地诊断疾病,提高医疗水平。
总之,双目立体视觉原理是人类视觉系统中非常重要的一部分,它使我们能够感知物体的深度和距离,为我们的日常生活和工作提供了重要的信息。
通过深入研究双目立体视觉的原理和应用,我们可以更好地理解人类视觉系统的工作机制,推动计算机视觉、虚拟现实、医学影像等领域的发展和创新。
双目立体视觉匹配

双目立体视觉匹配双目立体视觉匹配是指利用人类双眼在空间中略微不同的视角,联合大脑进行视觉信息的处理和匹配,从而获得空间的深度和立体感。
在现代科技中,利用双目立体视觉匹配可以实现很多实用的应用,比如立体影像、立体游戏、机器人视觉导航等。
双目立体视觉匹配技术是计算机视觉和人工智能领域的一个重要研究方向,具有广泛的应用前景。
一、双目立体视觉原理人类通过双眼获取的两幅视觉图像,实际上是同一个物体在不同视角下的投影。
这两幅图像之间存在视差,也就是物体在不同视角下的位置差异。
大脑通过对这些视差的处理,得出了深度信息,使我们能够感知到物体的三维空间位置。
双目立体视觉匹配主要涉及视差的计算和匹配。
在数字图像处理中,利用计算机对双眼获取的两幅图像进行处理和匹配,从而获取深度信息。
通常采用的方法包括视差计算、视差匹配和深度图生成等步骤。
1. 视差计算:通过一系列像素级的图像处理方法,计算出两幅图像之间的视差。
常见的计算方法包括半全局匹配(Semi-Global Matching, SGM)、立体匹配算法(Stereo Matching)、视差图像传感器(Depth Sensing Image Sensor)等。
2. 视差匹配:将两幅图像中对应的像素进行匹配,找到它们之间的视差值。
通常采用的方法包括基于特征点的匹配、基于像素级的匹配等。
3. 深度图生成:根据计算得出的视差信息,生成目标物体的深度图,从而实现三维空间中物体位置的感知。
双目立体视觉匹配的原理是基于人类视觉的工作原理,通过模拟人类双眼的工作方式,从而实现数字图像的深度感知和立体视觉效果。
二、双目立体视觉应用双目立体视觉匹配技术在现代科技中应用广泛,涉及到多个领域,包括计算机视觉、人工智能、机器人技术等。
以下将介绍一些典型的双目立体视觉应用。
1. 立体影像:利用双目立体视觉匹配技术,可以实现立体影像的拍摄和显示。
通过双目相机拍摄的图像以及虚拟现实(Virtual Reality, VR)或增强现实(Augmented Reality, AR)技术,可以实现逼真的立体影像体验。
双目视觉基本原理
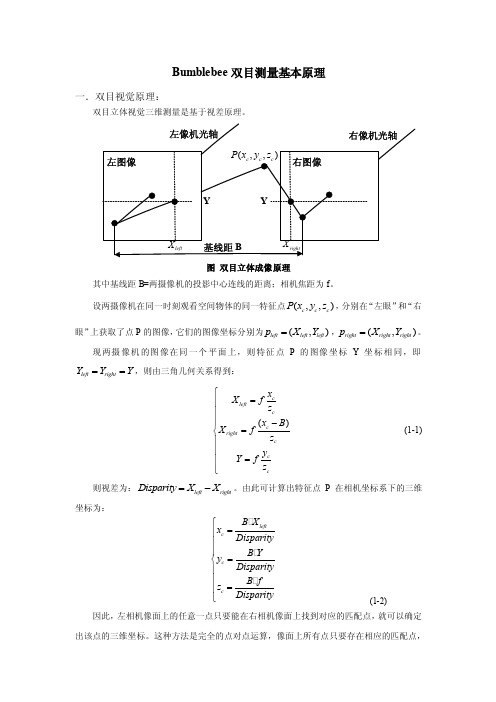
Bumblebee 双目测量基本原理一.双目视觉原理:双目立体视觉三维测量是基于视差原理。
图 双目立体成像原理其中基线距B=两摄像机的投影中心连线的距离;相机焦距为f 。
设两摄像机在同一时刻观看空间物体的同一特征点(,,)c c c P x y z ,分别在“左眼”和“右眼”上获取了点P 的图像,它们的图像坐标分别为(,)left left left p X Y =,(,)right right right p X Y =。
现两摄像机的图像在同一个平面上,则特征点P 的图像坐标Y 坐标相同,即left right Y Y Y ==,则由三角几何关系得到:()c left c c right c c c x X f z x B X f z y Y f z ⎧=⎪⎪⎪-=⎨⎪⎪=⎪⎩ (1-1)则视差为:left right Disparity X X =-。
由此可计算出特征点P 在相机坐标系下的三维坐标为:left c c c B X x Disparity B Y y Disparity B f z Disparity ⎧=⎪⎪⎪=⎨⎪⎪=⎪⎩ (1-2)因此,左相机像面上的任意一点只要能在右相机像面上找到对应的匹配点,就可以确定出该点的三维坐标。
这种方法是完全的点对点运算,像面上所有点只要存在相应的匹配点,就可以参与上述运算,从而获取其对应的三维坐标。
二.立体视觉测量过程1.图像获取(1) 单台相机移动获取(2) 双台相机获取:可有不同位置关系(一直线上、一平面上、立体分布)2.相机标定:确定空间坐标系中物体点同它在图像平面上像点之间的对应关系。
(1)内部参数:相机内部几何、光学参数(2)外部参数:相机坐标系与世界坐标系的转换3.图像预处理和特征提取预处理:主要包括图像对比度的增强、随机噪声的去除、滤波和图像的增强、伪彩色处理等;特征提取:常用的匹配特征主要有点状特征、线状特征和区域特征等4.立体匹配:根据对所选特征的计算,建立特征之间的对应关系,将同一个空间物理点在不同图像中的映像点对应起来。
双目立体视觉原理
双目立体视觉原理双目立体视觉是人类视觉系统利用双眼获取深度信息的一种视觉方式。
在日常生活中,我们常常利用双眼来感知物体的位置、距离和深度,这得益于双目立体视觉原理的作用。
双目立体视觉原理是指人类通过左右两只眼睛同时观察同一物体,由于左右眼之间存在一定的视差,从而产生了深度信息,使我们能够感知到物体的立体形状和位置。
双目立体视觉原理的实现基于人类双眼之间的视差。
当我们观察远处的物体时,左右眼所看到的图像几乎是一样的,视差较小;而当观察近处的物体时,左右眼所看到的图像会有较大的差异,视差较大。
通过比较左右眼的视差,人类大脑能够计算出物体的距离和深度信息。
双目立体视觉原理在人类视觉系统中扮演着重要的角色。
首先,双目立体视觉使我们能够更准确地感知物体的位置和距离,这对于日常生活中的行走、操纵物体等活动至关重要。
其次,双目立体视觉也为我们提供了更加生动和真实的视觉体验,使我们能够感受到物体的立体形状和空间位置,这对于艺术、设计和娱乐等领域具有重要意义。
在工程应用中,双目立体视觉原理也被广泛应用于计算机视觉、机器人技术等领域。
通过模拟人类双目视觉系统,计算机可以实现对物体的三维重建和深度感知,从而实现对环境的理解和感知。
在机器人领域,双目立体视觉也被用于实现机器人的自主导航、避障和抓取等任务,为机器人赋予了更加灵活和智能的能力。
总的来说,双目立体视觉原理是人类视觉系统中一项重要的功能,它使我们能够感知物体的立体形状和位置,为我们的日常生活、艺术创作和工程应用提供了重要的支持。
随着科学技术的不断发展,双目立体视觉原理也将继续发挥着重要的作用,并为人类带来更加丰富和多彩的视觉体验。
双目深度相机原理

双目深度相机原理
双目深度相机是一种利用双目立体视觉技术来获取物体深度信息的设备。
其原理是通过两个相机的视差来计算物体在三维空间中的位置和深度信息。
双目深度相机的两个相机分别从不同的角度拍摄同一物体,形成两幅不同的图像。
由于两个相机之间的距离和角度不同,因此它们拍摄的图像中对应物体的位置也会有所不同,这种现象被称为视差。
通过计算这种视差,我们可以得到物体在三维空间中的位置和深度信息。
具体来说,双目深度相机的原理可以分为以下几个步骤:
1. 获取图像:双目深度相机的两个相机分别获取物体的两幅不同角度的图像。
2. 图像校正:由于两个相机之间的位置和角度差异,拍摄的图像可能会出现畸变或错位。
因此需要对获取的图像进行校正,使其对齐并形成一致的视角。
3. 特征点匹配:在两幅图像中寻找对应特征点的位置,这些特征点可以是边缘、角点等明显的特征。
4. 计算视差:根据特征点在两幅图像中的位置差异,计算出物体的视差。
视差的大小反映了物体在三维空间中的深度信息。
5. 生成深度图:根据计算出的视差,生成物体的深度图。
深度图是一个表示物体表面各点距离相机远近的图像,其中每个像素点的值表示该点在三维空间中的深度信息。
6. 三维重建:结合深度图和校正后的图像,利用三角测量原理,重建出物体的三维模型。
双目深度相机具有结构简单、成本低、精度高等优点,因此在机器人视觉、自动驾驶、虚拟现实等领域得到了广泛应用。
双目立体视觉之原理揭秘ppt课件

2
双目摄像机视差原理图
坐标系以左相机为准,右相机相对于左相机是简单的平移,用坐标表示为(Tx,0,0)
3
双目摄像机视差原理图
4
双目摄像机视差原理图
5
双目摄像机视差原理图
6
双目摄像机视差原理图
视差公式
7
视差与深度的关系
进而获取物体二维信息,同时也可以通过求 视差获取物体深度信息,实现获取物体距离, 物体高度,物体三维重建等计算。
14
8
二.外极线几何讲解
9
外极线几何知识
非标准外极线几何图
10
1.极平面 2.极线
3.极点 4.极线约束
11
外极线几何
12
三.双目标定
13
双目标定物理意义: 获取非标准外极线几何到标准外极线几何的 变换矩阵,校正两个相机的图像。根据两个相 机的相对位姿,从而在标准外极线几何图像 中获取物体在另一个相机成像中位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
双目摄像机如同人的两个眼睛
人的双眼可以获取物体的深度信息
双目摄像机视差原理图
坐标系以左相机为准,右相机相对于左相机是简单的平移,用坐标表示为(Tx,0,0)
双目摄像机视差原理图
双目摄像机视差原理图
双目摄像机视差原理图
双目摄像机视差原理图
视差公式
视差与深度的关系
二.外极线几何讲解
外极线几何知识
非标准外极线几何图
1.极平面
2.极线
3.极点
4.极线约束
外极线几何
三.双目标定
双目标定物理意义: 获取非标准外极线几何到标准外极线几何的 变换矩阵,校正两个相机的图像。根据两个相 机的相对位姿,从而在标准外极线几何图像 中获取物体在另一个相机成像中位置。
进而获取物体二维信息,同时也可以通过求 视差获取物体深度信息,实现获取物体距离, 物体高度,物体三维重建等计算。