光流算法
计算机视觉中的光流计算算法分析
计算机视觉中的光流计算算法分析计算机视觉是一门涉及计算机处理和理解视觉数据的学科。
光流计算算法是其中一项重要的技术之一。
光流计算是指基于图像序列的时间相邻性,计算图像上每一个像素的运动速度和方向。
光流计算算法的应用非常广泛,可以被用于目标跟踪、图像稳定、自动驾驶等领域。
本文将从光流计算算法的原理、分类及其应用方面进行探讨。
一、光流计算算法的原理光流计算基于运动恒定假设,假设图像上同一物体在不同时间间隔内位置的变化量是连续的,图像的颜色值变化是由物体的运动引起的。
在计算光流时,需要利用相邻两帧图像之间的变化来计算每个像素在X和Y方向上的运动速度和方向。
设两幅灰度图像的亮度值分别为I(x, y, t)和I(x+u, y+v,t+1),其中(x, y)为图像中的像素坐标,t为时间,u和v是在像素上的位移,光流v=(u, v) 是取决于基于灰度不变假设的图像变量,因此可以用下式来计算:Ixu+Iyv+It=0;其中Ix表示灰度图像在x方向上的梯度,Iy表示灰度图像在y方向上的梯度,It表示两帧图像之间的灰度值变化。
二、光流计算算法的分类为了更好地研究和解决光流计算问题,光流计算算法可以分为密集算法、稠密算法和稀疏算法等几种不同的算法类别。
密集算法密集算法的优势在于可以对整个图像进行运动的跟踪,因此,可以检查相邻像素之间的连续性,并可以提高图像的精度。
但是,这种算法的缺点在于经常需要更强大的计算硬件来处理。
稠密算法稠密算法是基于密集的光流计算,它可以保证准确性和稳定性。
这种算法可以提高像素之间光流的连续性,并抑制误差的导致。
稠密算法有丰富的应用,例如可以用于图像稳定和视频抖动消除。
稀疏算法稀疏算法的优势在于计算量较小,这使得该算法非常适合于在计算能力低的计算机设备上实现。
然而,由于其只针对某些特定像素的元素计算光流,因此可能会导致图像间断。
三、光流计算算法的应用光流计算算法已经有广泛的应用领域,包括了目标跟踪、图像稳定、自动驾驶等等。
光流算法在视频跟踪中的应用
光流算法在视频跟踪中的应用一、光流算法简介在图像处理中,光流算法是重要的算法之一。
光流主要是研究图像中连续两帧之间物体移动情况的阿基米德区间。
物体的位移可以通过分析相邻两帧图像中的像素亮度变化情况来确定。
因此,光流算法可以在视频跟踪和计算机视觉中广泛应用。
光流算法的基本思想是:利用图像的灰度特性,通过求解相邻图像中相同物体在像素级别上的移动距离来实现对图像运动的分析。
二、光流算法在视频跟踪中的应用视频跟踪是从视频中提取所需信息的过程。
该处理过程可以为计算机视觉提供宝贵的信息。
目前光流算法作为视频跟踪的一种常用方法,其主要应用在以下方面:1. 物体跟踪光流算法能够很好地跟踪并识别运动中的物体。
跟踪算法可以通过计算相邻两帧之间物体像素的移动轨迹来实现。
当运动物体的轨迹出现中断时,光流算法可以通过机器学习的方法来确定物体的位置和大小信息。
2. 目标检测目标检测是识别图像或视频帧的流程,其中包含人、车、动物等物体的检测和分类。
光流算法可以应用于目标检测的流程中,通过分析相邻帧之间物体的移动情况,实现识别目标的过程。
例如,算法可以检测物体的运动轨迹,从而确定目标的速度和方向。
3. 姿态估计姿态估计是计算机视觉中的一个重要任务。
它被用于识别物体的旋转方向和移动方向。
在视频跟踪中,光流算法可以通过计算物体像素的转动角度和位置的变化来从连续的帧序列中提取目标的方向、角度和运动信息。
4. 前景提取前景提取是从视频中提取包括运动物体和背景在内的特定物体的方法。
光流算法可以通过计算相邻两帧图像中每个像素的亮度值变化来确定前景,从而剔除背景噪声。
该方法可以对视频进行有效而准确的分割,从而提高计算机图像处理的效果。
三、优势和应用光流算法在视频跟踪中的应用具有很大的优势。
首先,光流算法可以通过量化像素运动的变化来提高对运动物体的检测,并提高跟踪精度。
其次,光流算法可以通过机器学习的方法来学习物体运动的规律,从而提高算法的可用性和精度。
H-S光流算法及仿真总结
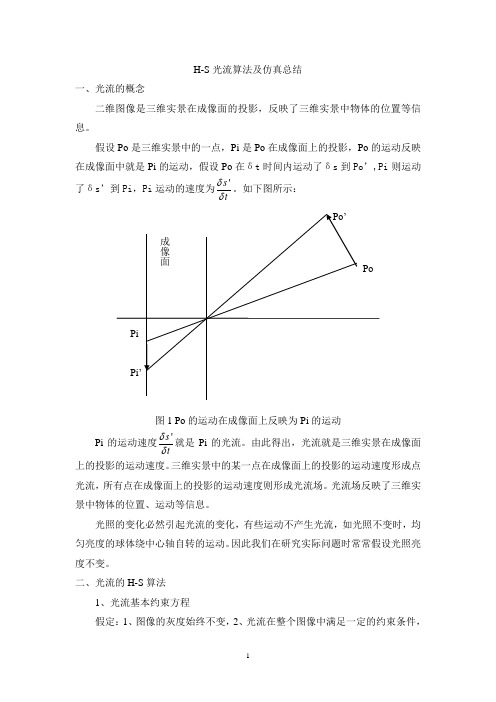
H-S光流算法及仿真总结一、光流的概念二维图像是三维实景在成像面的投影,反映了三维实景中物体的位置等信息。
假设Po是三维实景中的一点,Pi是Po在成像面上的投影,Po的运动反映在成像面中就是Pi的运动,假设Po在δt时间内运动了δs到Po’,Pi则运动了δs’到Pi,Pi运动的速度为'stδδ。
如下图所示:图1 Po的运动在成像面上反映为Pi的运动Pi的运动速度'stδδ就是Pi的光流。
由此得出,光流就是三维实景在成像面上的投影的运动速度。
三维实景中的某一点在成像面上的投影的运动速度形成点光流,所有点在成像面上的投影的运动速度则形成光流场。
光流场反映了三维实景中物体的位置、运动等信息。
光照的变化必然引起光流的变化,有些运动不产生光流,如光照不变时,均匀亮度的球体绕中心轴自转的运动。
因此我们在研究实际问题时常常假设光照亮度不变。
二、光流的H-S算法1、光流基本约束方程假定:1、图像的灰度始终不变,2、光流在整个图像中满足一定的约束条件,即全局性约束,3光流在整个图像中均匀变化, 无重叠,即平滑性约束。
设I (x ,y ,t )是图像上点(x ,y )某一时刻t 的亮度,u (x ,y )和v (x ,y )分别是点(x ,y )在x 方向和y 方向上的光流分量,点(x ,y )在t+δt 时间内运动到(x+δx ,y+δy ),其中,δx=u*δt ,δy=v*δt 。
由于亮度不变,所以有I (x+δx ,y+δy ,t+δt )=I (x ,y ,t ) 用泰勒级数展开得(,,)(,,)I I II x y t dx dy dt I x y t x y tε∂∂∂++++=∂∂∂ 其中ε是关于δx 、δy 、δt 的二阶以上的项,可以忽略不计 两边同除以δt 得0I dx I dy dI x dt y dt dt ∂∂++=∂∂ 设x I I x ∂=∂,y I I y ∂=∂,t I I t ∂=∂,dx u dt =,dy v dt =,则有光流基本约束方程x y t I u I v I ++=2、H-S 提出的光流算法迭代方程 迭代方程()()(1)()222k k x y tk k xx yI u I v I uuI I Iλ+++=-++,()()(1)()222k k x y tk k yx yI u I v I vvI I Iλ+++=-++其中,k 是迭代次数, u 和v 是光流局部平均值,λ为权重系数。
光流法原理

光流法原理光流法是一种基于图像处理的运动估计方法,它可以通过分析图像中物体的运动轨迹来推断物体的运动情况。
光流法的基本原理是,通过比较相邻帧之间的像素点灰度值变化,从而计算出物体在图像中的运动速度和方向。
本文将从光流法的基本原理、应用领域、算法实现等方面进行详细介绍。
一、光流法基本原理光流法的基本原理是,通过比较相邻帧之间的像素点灰度值变化,从而计算出物体在图像中的运动速度和方向。
它基于两个假设:一是相邻帧之间的像素点灰度值变化与物体的运动有关;二是相邻像素点之间的灰度值变化是连续的。
根据这两个假设,可以得出光流方程:I(x+u, y+v, t+1) = I(x, y, t)其中,I(x,y,t)表示在时刻t下坐标为(x,y)的像素点的灰度值,(u,v)表示物体在水平和竖直方向上的运动速度。
根据光流方程,可以将光流法分为两类:基于亮度变化的光流法和基于相位变化的光流法。
基于亮度变化的光流法是最常用的光流法,它通过比较相邻帧之间像素点的灰度值变化来计算物体的运动速度和方向。
基于相位变化的光流法则是通过比较相邻帧之间像素点灰度值的相位变化来计算物体的运动速度和方向。
二、光流法应用领域光流法在计算机视觉和机器人领域中有着广泛的应用。
具体应用领域如下:1.视频压缩光流法可以用于视频压缩中,通过计算视频中物体的运动轨迹,可以对视频进行分区,并对每个分区内的像素点进行编码,从而实现视频的压缩。
2.目标跟踪光流法可以用于目标跟踪,通过计算目标物体在图像中的运动轨迹,可以实现目标物体的跟踪和识别。
3.自动驾驶光流法可以用于自动驾驶中,通过计算车辆周围物体的运动轨迹,可以实现车辆的自动驾驶和避障。
4.视频稳定光流法可以用于视频稳定中,通过计算相邻帧之间物体的运动轨迹,可以实现视频的稳定,从而提高视频的观看体验。
三、光流法算法实现光流法的算法实现主要有两种方法:基于区域的光流法和基于像素的光流法。
1.基于区域的光流法基于区域的光流法是将图像分成若干个区域,然后计算每个区域内像素点的平均运动速度和方向。
光流算法
它是一种运动模式,这种运动模式指的是一个物体、表面、边缘在一个视角下由一个观察者(比如眼睛、摄像头等)和背景之间形成的明显移动。
光流技术,如运动检测和图像分割,时间碰撞,运动补偿编码,三维立体视差,都是利用了这种边缘或表面运动的技术。
光流的概念:(Optical flow or optic flow)二维图像的移动相对于观察者而言是三维物体移动的在图像平面的投影。
有序的图像可以估计出二维图像的瞬时图像速率或离散图像转移。
光流算法:它评估了两幅图像的之间的变形,它的基本假设是体素和图像像素守恒。
它假设一个物体的颜色在前后两帧没有巨大而明显的变化。
基于这个思路,我们可以得到图像约束方程。
不同的光流算法解决了假定了不同附加条件的光流问题。
Lucas–Kanade算法:这个算法是最常见,最流行的。
它计算两帧在时间t 到t + δt之间每个每个像素点位置的移动。
由于它是基于图像信号的泰勒级数,这种方法称为差分,这就是对于空间和时间坐标使用偏导数。
图像约束方程可以写为I(x,y,z,t) = I(x+ δx,y+ δy,z+ δz,t+ δt)I(x, y,z, t)为在(x,y,z)位置的体素。
我们假设移动足够的小,那么对图像约束方程使用泰勒公式,我们可以得到:H.O.T. 指更高阶,在移动足够小的情况下可以忽略。
从这个方程中我们可以得到:或者我们得到:V x,V y,V z分别是I(x,y,z,t)的光流向量中x,y,z的组成。
, , 和则是图像在(x,y,z,t)这一点向相应方向的差分。
所以I x V x + I y V y + I z V z= −I t。
写做:这个方程有三个未知量,尚不能被解决,这也就是所谓光流算法的光圈问题。
那么要找到光流向量则需要另一套解决的方案。
而Lucas-Kanade算法是一个非迭代的算法:假设流(Vx,Vy,Vz)在一个大小为m*m*m(m>1)的小窗中是一个常数,那么从像素1...n, n = m3中可以得到下列一组方程:三个未知数但是有多于三个的方程,这个方程组自然是个超定方程,也就是说方程组内有冗余,方程组可以表示为:记作:为了解决这个超定问题,我们采用最小二乘法:or得到:其中的求和是从1到n。
计算 光流
计算光流光流(Optical Flow)是指在连续帧之间的图像中,同一场景中的物体在时间上的位移。
光流可以用于分析图像序列中的运动信息,例如在视频中跟踪物体的运动。
在计算机视觉领域,光流是一个重要的概念,有多种方法可以用来计算光流。
一种常见的光流计算方法是基于亮度一致性假设,即在相邻帧中的像素亮度保持不变。
这个假设可以表示为以下方程:其中,I_x 和 I_y 是图像在 x 和 y 方向上的梯度, I_t 是图像在时间上的梯度, u 和 v 分别是像素在 x 和 y 方向上的速度。
这个方程可以用来求解光流的速度。
光流的计算可以通过各种技术,包括基于区域的方法、基于特征点的方法和基于深度学习的方法。
一些常见的光流计算算法包括 Lucas-Kanade 方法、Horn-Schunck 方法、以及近年来基于深度学习的光流估计方法。
在实际应用中,你可以使用计算机视觉库如OpenCV等来实现光流的计算。
以下是一个使用OpenCV计算光流的简单示例:import cv2import numpy as np# 读取两帧图像frame1 = cv2.imread('frame1.jpg')frame2 = cv2.imread('frame2.jpg')# 将图像转换为灰度gray1 = cv2.cvtColor(frame1, cv2.COLOR_BGR2GRAY)gray2 = cv2.cvtColor(frame2, cv2.COLOR_BGR2GRAY)# 使用Lucas-Kanade光流法计算光流lk_params = dict(winSize=(15, 15),maxLevel=2,criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03))# 查找关键点p0 = cv2.goodFeaturesToTrack(gray1, mask=None, **feature_params)# 计算光流p1, st, err = cv2.calcOpticalFlowPyrLK(gray1, gray2, p0, None, **lk_params)# 选择好的点good_new = p1[st == 1]good_old = p0[st == 1]# 在图像上绘制光流for i, (new, old) in enumerate(zip(good_new, good_old)):a, b = new.ravel()c, d = old.ravel()frame2 = cv2.line(frame2, (a, b), (c, d), (0, 255, 0), 2)frame2 = cv2.circle(frame2, (a, b), 5, (0, 255, 0), -1)# 显示结果cv2.imshow('Optical Flow', frame2)cv2.waitKey(0)cv2.destroyAllWindows()请注意,以上示例中使用了Lucas-Kanade光流法,你可以根据实际情况选择其他方法。
光流算法求速度
光流算法求速度
光流算法是一种计算从一帧图像到下一帧图像之间的移动物体速度的方法。
它基于光的亮度一致性假设,即相邻的像素在时间上保持相对稳定的亮度。
光流算法通过比较相邻帧图像中的像素亮度差异来求取物体的速度。
光流算法的基本原理如下:
1. 首先,从一帧图像中选择一些关键点,也称为特征点。
可以使用角点检测算法(如Harris角点检测)或其他特征检测方法找到这些特征点。
2. 接下来,在下一帧图像中找到与这些特征点相对应的点。
3. 然后,通过比较这些特征点在两帧图像中的位置变化来计算他们的视差(位移)。
光流向量可以通过这些视差得到。
4. 最后,根据光流向量的大小和方向可以估计出物体的运动速度。
有多种光流算法可以用来求解速度,如Lucas-Kanade算法、Horn-Schunck算法、Farneback算法等。
不同的算法具有不同的优缺点,在具体应用中可以根据需要选择合适的算法。
总的来说,光流算法通过比较图像间的亮度变化,利用光流向量来估计物体的移动速度。
光流算法——精选推荐

光流算法——精选推荐光流算法,精选推荐光流算法是一种用于计算图像序列中像素的运动信息的方法。
它通过分析图像序列中相邻帧之间的像素变化,推导出像素的运动方向和速度。
光流算法被广泛应用于计算机视觉和机器人领域,包括目标跟踪、运动分析、人机交互等。
光流算法的基本原理是利用像素间的亮度信息来推断像素的运动。
在计算光流时,假设相邻图像帧之间的像素值变化可以视为亮度不变。
换句话说,对于两个相邻的图像帧中的相同物体,其像素之间的亮度变化应该是由于相对运动而引起的。
光流算法的主要思想可以总结为以下几步:1.计算图像的梯度:首先,对图像序列的当前帧和下一帧进行梯度计算。
梯度可以反映图像中的亮度变化。
3.解算光流方程:通过求解光流方程,可以得到每个像素的运动向量。
光流向量表示像素在图像上的位移。
4.平滑光流场:为了减小计算误差和噪声干扰,通常采用平滑技术对光流场进行平滑处理。
光流算法有许多不同的实现方法,其中一些比较常用的方法包括:Lucas-Kanade光流算法、Horn-Schunck光流算法和金字塔光流算法。
Lucas-Kanade光流算法是一种最经典的光流算法。
它基于局部区域内的亮度不变性假设,将光流问题转化为一个最小二乘优化问题。
该算法通过计算每个像素点的残差来确定光流的优化目标,并利用高斯金字塔对图像进行多尺度处理,以处理大运动或纹理不连续的区域。
Horn-Schunck光流算法则是另一种经典的光流算法,它基于全局一致性假设,认为整个图像区域的亮度变化可以由一个全局的运动场来描述。
该算法通过最小化光流向量场的平方差来优化光流估计结果,以达到全局平滑的效果。
金字塔光流算法是一种多尺度的光流估计方法,它通过构建图像金字塔,将原始图像分解为不同尺度的子图像,来处理由于尺度变化引起的光流模糊问题。
该方法可以有效地处理大运动或模糊的图像序列。
除了上述方法之外,还有一些其他的光流算法,如基于稀疏特征的光流算法、基于密集特征的光流算法等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
它是一种运动模式,这种运动模式指的是一个物体、表面、边缘在一个视角下由一个观察者(比如眼睛、摄像头等)和背景之间形成的明显移动。
光流技术,如运动检测和图像分割,时间碰撞,运动补偿编码,三维立体视差,都是利用了这种边缘或表面运动的技术。
光流的概念:(Optical flow or optic flow)二维图像的移动相对于观察者而言是三维物体移动的在图像平面的投影。
有序的图像可以估计出二维图像的瞬时图像速率或离散图像转移。
光流算法:
它评估了两幅图像的之间的变形,它的基本假设是体素和图像像素守恒。
它假设一个物体的颜色在前后两帧没有巨大而明显的变化。
基于这个思路,我们可以得到图像约束方程。
不同的光流算法解决了假定了不同附加条件的光流问题。
Lucas–Kanade算法:
这个算法是最常见,最流行的。
它计算两帧在时间t 到t + δt之间每个每个像素点位置的移动。
由于它是基于图像信号的泰勒级数,这种方法称为差分,这就是对于空间和时间坐标使用偏导数。
图像约束方程可以写为I(x,y,z,t) = I(x+ δx,y+ δy,z+ δz,t+ δt)
I(x, y,z, t)为在(x,y,z)位置的体素。
我们假设移动足够的小,那么对图像约束方程使用泰勒公式,我们可以
得到:
H.O.T. 指更高阶,在移动足够小的情况下可以忽略。
从这个方程中我们可以得到:
或者
我们得到:
V x,V y,V z分别是I(x,y,z,t)的光流向量中x,y,z的组成。
, , 和则是图像在(x,y,z,t)这一点向相应方向的差分。
所以
I x V x + I y V y + I z V z= −I t。
写做:
这个方程有三个未知量,尚不能被解决,这也就是所谓光流算法的光圈问题。
那么要找到光流向量则需要另一套解决的方案。
而Lucas-Kanade算法是一个非迭代的算法:
假设流(Vx,Vy,Vz)在一个大小为m*m*m(m>1)的小窗中是一个常数,那么从像素
1...n, n = m3中可以得到下列一组方程:
三个未知数但是有多于三个的方程,这个方程组自然是个超定方程,也就是说方程组内有冗余,方程组可以表示为:
记作:
为了解决这个超定问题,我们采用最小二乘法:
or
得到:
其中的求和是从1到n。
这也就是说寻找光流可以通过在四维上图像导数的分别累加得出。
我们还需
要一个权重函数W(i, j,k),来突出窗口中心点的坐标。
高
斯函数做这项工作是非常合适的,
这个算法的不足在于它不能产生一个密度很高的流向量,例如在运动的边缘和黑大的同质区域中的微小移动方面流信息会很快的褪去。
它的优点在于有噪声存在的鲁棒性还是可以的。