基于LQR控制的主动悬架优化设计
基于遗传算法的汽车主动悬架LQR控制器的优化设计
性 能指标 加权 系数 的 直接 决 定其 所 输 出的 最优 控 制 力及 控制 效果 。但 是加 权 系 数选 择 主 要 由设 计 者 的 经验 确定 , 这样 的 “ 最优” 控 制 实 际上 完 全 依 赖 于 设 计者 的经 验 。如果 选 择 不 当 , 虽 然 可 以求 出 最 优 解 却没 有 实际意 义 , 有 时还 可能 得 出错 误 的结论 。另一 方面 , 所选 择的加权 系 数常 常无 法保 证性 能 指标 的最
O 前 言
悬 架 系统是 汽 车结 构 中 的一 个 起 到举 足 轻 重 的
组 成部 分 , 它具体是 指衔接车轮 ( 车桥 ) 与车身 ( 车 架) 的所 有零 部件 的统 称 , 减 震器 和导 向机 构 以及 弹 簧 是 它 的三个 核 心 组 成 部 分 , 是 增 强 车 辆 平 顺 舒 适
Th e Op t i ma l De s i g n o f Au t o mo b i l e Ac t i v e S u s p e n s i o n wi t h LQR Co n t r o l l e r Ba s e d o n Ge n e t i c Al g o r i t h m
Ab s t r a c t :Ai mi n g a t t h e L QR c o n t r o l l e r o f Au t o mo b i l e a c t i v e s u s p e r s i o n, T h e we i g h t e d ma t r i x wa s o p t i —
为 目标 函数 对加权矩 阵进 行优化 , 提高了L Q R控制 器的设计效率 和性能 。仿真 结果表 明基 于遗 传 算法 设计 的 L Q R控制 器减少 了路 面对 车身的振动 冲击 , 提 高了汽车操 作的稳 定性和 乘 坐的舒适性 。 关键 词 : 主动 悬 架 ; L Q R; 遗 传 算法 ; 目标 函数 ; 仿 真 中图分 类号 : U 4 6 1 . 4 文献 标识 码 : B
基于lqr(pid)控制策略主动悬架控制
1 概述
汽车,自它的降世开始,它总是吸引着人们的注意,许多人总是 为了它付出巨大的热情与兴趣。其中具有卓越性能的悬架系统在汽车 的整体性能中起着至关重要的作用。由于传统的被动悬架经过数十年 的研究已经达到极限,因此出现了各种可控制的悬架。 汽车悬架极大地影响了汽车的稳定性。因此,理论上,悬架的设 计应满足以下性能要求:务必确保汽车行驶良好。为此,汽车需要具 备相对较低的振动频率,乘车人员在车中所能承受的振动加速度应满 足国际标准 ISO2631-1-1997 要求的人体承受震动界限。它具有合适的 减震性能,与悬架的特性更好地匹配,确保车轮与车体在共振区的振 动幅度小,衰减振动速度快。汽车拥有非常好的乘坐舒适性。保证车 辆具有操稳性。当车轮持续跳动时,导销机构中的主销的定位参数变 化不应过大,应协调车轮运动和导向机构。没有摆振现象(主销周围 的车轮连续振动)。汽车转向应有一些不足转向特性。 汽车制动,确保汽车在加速过程时的稳定性,并降低“点头”、“仰 头”的可能性。它可以可靠地传递车身和车轮之间的各种反作用力和 力矩。确保车辆正常运转并减少轮胎磨损。 主动悬架系统的主要目的是优化悬架系统的性能和参数。然而, 在实际控制过程中,主动悬架在各种控制策略之后不能优化系统所有 参数的性能。经常会出现某一个或者某几个性能突然的有所提高,另 一些的性能就相对下降;所以最终对主动式悬挂控制规律利用遗传算 法的全局优化能力对参数进行优化,这样才能使悬挂系统的总体性能 达到最佳。
0
0
−q2
−
K
2 s
mb2
0 0
0
0
0
−q2
−
K
2 s
mb2
q1
+
q2
+
K
2 s
基于遗传算法的汽车主动悬架LQR控制器的优化设计
基于遗传算法的汽车主动悬架LQR控制器的优化设计
刘晓培
【期刊名称】《组合机床与自动化加工技术》
【年(卷),期】2013(000)006
【摘要】针对汽车主动悬架LQR控制器的设计,利用遗传算法的全局搜索能力,以主动悬架的性能指标作为目标函数对加权矩阵进行优化,提高了LQR控制器的设计效率和性能.仿真结果表明基于遗传算法设计的LQR控制器减少了路面对车身的振动冲击,提高了汽车操作的稳定性和乘坐的舒适性.
【总页数】3页(P78-80)
【作者】刘晓培
【作者单位】重庆科技学院机械与动力工程学院,重庆 401331
【正文语种】中文
【中图分类】U461.4
【相关文献】
1.基于遗传算法的汽车主动悬架控制器优化设计 [J], 桑楠;白玉;李玉芳
2.基于改进遗传算法的汽车主动悬架控制器设计 [J], 曾理;孙冬梅;周兵
3.基于遗传算法的汽车主动悬架LQG控制器的设计 [J], 陈丽静
4.基于遗传算法优化的汽车主动悬架LQR控制研究 [J], 胡耀中;刘俊
5.基于遗传算法的汽车主动悬架LQR控制研究∗ [J], 许伟; 高远
因版权原因,仅展示原文概要,查看原文内容请购买。
基于LQR控制的主动悬架优化设计
基于LQR控制的主动悬架优化设计摘要:根据汽车行驶性能的要求,本文以1/4 车辆模型为例,建立汽车的动力学模型,利用线性二次最优控制理论对主动悬架的LQG 控制器进行设计,并运用MATLAB/simulink对汽车动力学模型进行仿真。
结果表明: 具有LQG 控制器的主动悬架对车辆行驶平稳性和乘坐舒适性的改善有良好效果。
关键词:主动悬架;被动悬架;LQG控制器引言悬架系统是汽车的重要部件, 对于汽车的平顺性、操稳性和安全性都有着重要的影响, 而主动悬架是悬架发展的必然方向。
控制器的设计对于主动悬架性能的发挥起着重要的作用, 本文中以1/4 汽车主动悬架为研究对象, 建立汽车动力学模型和设计LQG控制器算法, 应用Matlab/Simulink 进行汽车系统的控制仿真。
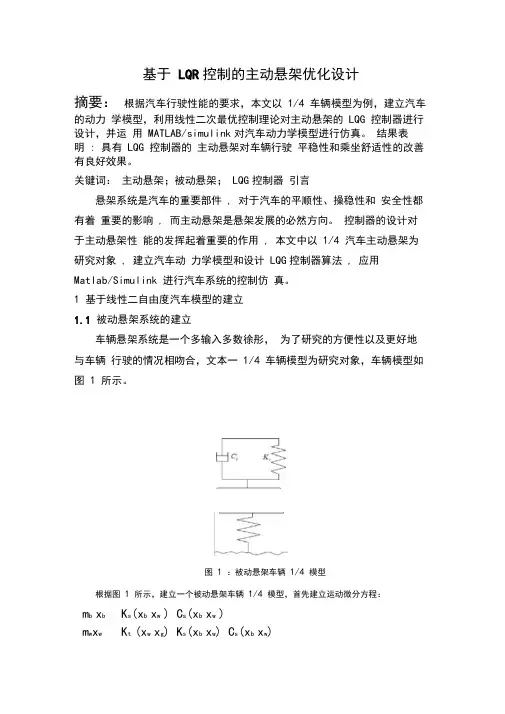
1 基于线性二自由度汽车模型的建立1.1 被动悬架系统的建立车辆悬架系统是一个多输入多数徐彤,为了研究的方便性以及更好地与车辆行驶的情况相吻合,文本一1/4 车辆模型为研究对象,车辆模型如图1 所示。
图1 :被动悬架车辆1/4 模型根据图1 所示,建立一个被动悬架车辆1/4 模型,首先建立运动微分方程:m b x b K s(x b x w ) C s(x b x w )m w x w K t (x w x g) K s(x b x w) C s(x b x w)整理得:xbC sxbsssx w s xb ssxm b m bmbC s K sK s K txbs x b s xb s tx bm w m wmw1)式中: C s 为悬架阻尼, K s 为悬架刚度。
选取状态变量和输入向量为: U x g则可将系统运动方程及路面激励写成状态空间矩阵形式,即:X AX BUC sC sK sK sm bmb mb mbK tCs C sK sK s K sABmwmwmwmw mw1 0 0 01x w x gx b x w ]T将性能指标项写为状态变量以及输入信号的线性组合形式,即:Y CX DU其中:Cs Cs Ks Ks0 mbmbmbmbD1 C00 0 1111.2 被动悬架系统的建立mbC s其中, A 为状态矩阵, B 为输入矩阵,其值如下:将车身加速度、轮胎动变形、悬架动行程作为性能指标,即:根据图 2 所示,建立一个主动悬架车辆 1/4 模型,首先建立运动微分方程:m w x w K s (x b x w ) K t (x g x w ) U g m b x b K s ( x b x w ) U g1.3 路面模型的建立文利用白噪声信号为路面输入激励,x g (t) 2 f 0x g (t) 2 G 0U 0 w(t)其中, f 0 为下截止频率, Hz ;G 0 为路面不平度系数, m 3/cycle ;U 0 为前进车 速, m/sec ;w 为均值为零的随机输入单位白噪声。
车辆悬挂LQR主动控制权矩阵权重参数优化
车辆悬挂LQR主动控制权矩阵权重参数优化张进秋;彭虎;张建;彭志召;孙宜权;王辉【摘要】针对LQR主动控制算法权矩阵Q和R的取值困难的问题,为降低权矩阵取值复杂度,分别设计权矩阵Q和R的权重参数λ和ξ.建立优化目标函数f,并分析了λ和ξ对f的影响.利用遗传算法(Genetic Algorithm,GA)的快速搜索能力,通过降维寻优,得到目标函数最优解.对GA-LQR的振动控制性能分析结果表明,GA-LQR 对乘坐舒适性和操纵稳定性的改善比LQR明显,目标函数f的值更小.该LQR权矩阵权重参数优化方法简单有效,适用于车辆工程领域.【期刊名称】《振动与冲击》【年(卷),期】2018(037)022【总页数】6页(P214-219)【关键词】遗传算法;LQR;权矩阵;优化【作者】张进秋;彭虎;张建;彭志召;孙宜权;王辉【作者单位】装甲兵工程学院装备试用与培训大队,北京100072;装甲兵工程学院技术保障工程系,北京100072;装甲兵工程学院装备试用与培训大队,北京100072;装甲兵工程学院装备试用与培训大队,北京100072;装甲兵工程学院装备试用与培训大队,北京100072;66222部队,北京102202【正文语种】中文【中图分类】U436.33;O328车辆主动悬挂可实现任意方向出力,可更好地跟踪路面状况变化条件下对悬挂隔振所需的控制力,具有良好的发展前景[1-2]。
良好的主动控制算法是保证主动控制性能关键之一[3-4]。
LQR线性二次型最优控制是一种经典的最优控制算法,在航天、建筑、桥梁等方面得到了广泛应用[5-7]。
LQR主动控制算法的关键在于权矩阵Q和R的设计,且一般无规律可循,通常采用试凑的方法来确定权矩阵的值[8]。
该方法的局限性在于效率较低,且难以得到较优的解。
遗传算法(Genetic Algorithm, GA)是一类模拟自然界优化进化和繁殖过程的自适应全局概率搜索方法[9]。
基于遗传算法的履带车辆电磁悬挂LQR控制优化
摘
要: 提 出采用遗传算法对 电磁 悬挂 L Q R控制算法进行优化的方法。针对被动悬挂 不可控、 半主动悬挂不能主动 出力
和主动悬挂耗能过大等问题 , 提 出并设 计了基于 电磁 作动 器和磁流 变阻尼器相 复合 的履带车辆电磁 悬挂结构方案, 并依
据 其 简化模 型设 计 了 L Q R控 制 器 。提 出采 用主 、 被 动 悬 挂性 能评 价 指标 的均 方根 比值 之 和作 为 适 应度 函数 进行 L Q R权
中图分类号 : T H1 6 ; T B 3 8 1 文献标识码 : A 文章编 号 : 1 0 0 1 — 3 9 9 7 ( 2 0 1 5 ) 0 2 — 0 2 2 9 — 0 4
Op t i mi z a t i o n o f El e c t r o ma g n e t i c Su s p e n s i o n L QR Co n t r o l
 ̄
t o r h e o l o i g c a l d a m p e r ( M R D)a n d e l e c t r o m a g n e t i c ct a u to a r ( E A) w i t h t h e t r a d i t i o n l a s p r i n g e l e m e n t i n p a r a l l e l s i
f o r Mi l i t a r y Tr a c k e d Ve h i c l e Us i n g Ge n e t i c Al g o r i t h m
YUE J i e ,Z HANG J i n — q i u,P ENG Z h i - z h a o ,Z HANG L e i
基于LQR控制的现代客车自适应空气悬架
10.16638/ki.1671-7988.2021.06.031基于LQR控制的现代客车自适应空气悬架王旭(扬州亚星客车股份有限公司,江苏扬州225116)摘要:长期在不良工况的道路上驾驶会降低驾驶员的乘坐舒适性。
随着人们对乘坐舒适性需求不断提升,空气弹簧的优势尤为明显。
文章提出了一种基于LQR控制策略的自适应空气悬架系统的创新设计方案,提出的LQR控制器采用粒子群算法进行优化。
以客车空气悬架为研究对象,采用MATLAB软件对空气悬架系统的被动和自适应动力学模型进行了设计和仿真。
仿真结果表明,自适应空气悬架系统在保证车辆稳定性的同时,降低了车辆在随机道路上的最大位移幅值,从而提高了车辆的平顺性。
关键词:空气悬架;PID;PSO;自适应悬架;乘坐舒适性中图分类号:U461.4 文献标识码:A 文章编号:1671-7988(2021)06-101-04Modern passenger car adaptive air suspension based on LQR controlWang Xu( Yangzhou Yaxing Bus Co., Ltd., Jiangsu Yangzhou 225116 )Abstract: Driving on the road under bad working conditions for a long time will reduce the driver's riding comfort. With the increasing demand for ride comfort, the advantage of air spring is especially obvious. This paper presents an innovative design scheme of adaptive air suspension system based on LQR control strategy. The proposed LQR controller is optimized by particle swarm optimization. The passive and adaptive dynamic models of the air suspension system of passenger cars were designed and simulated by MATLAB software. The simulation results show that the adaptive air suspension system can not only ensure the stability of the vehicle, but also reduce the maximum displacement amplitude of the vehicle on the random road, thus improving the ride comfort of the vehicle.Keywords: Air suspension; PID; PSO; Adaptive suspension; Ride comfortCLC NO.: U461.4 Document Code: A Article ID: 1671-7988(2021)06-101-041 引言对驾驶舒适性需求的增加要求在汽车上使用主动悬架系统。
基于遗传算法优化的汽车主动悬架LQR控制研究
d o i : 1 0 . 3 9 6 9  ̄ . i s s n . 1 6 7 3 - 3 1 4 2 . 2 0 1 7 . 0 7 . 0 0 4
基 于遗传算 法优 化 的汽 车主动悬架 L QR控制研 究
胡耀 中,刘俊
( 2 3 0 0 0 9安徽省 合肥 市 合肥工业大学 汽车与交通工程学院 ) 【 摘要 】 针对主动 悬架的 L Q R控制 时性 能指标权 重 系数依 靠设计经验的缺点 ,基 于遗传算 法和 最优控 制理
仿真验证 。仿真结果表明 ,相对于传统的 L Q R控制 器,所设计的 G A + L Q R控制 器有效地缓解 了路面冲击 ,
显著地改善 了汽 车的行驶 平顺性和 乘坐舒 适性。
【 关键词 】 主动 悬架;遗传 算法 ;最优控 制 ;行 驶平顺性 ;优化
【 中图分类号 】U 4 6 3 . 3 3 【 文献标识码 】 A 【 文章编号 】 1 6 7 3 — 3 1 4 2 ( 2 0 1 7 ) 0 7 — 0 0 1 4 — 0 5
g e n e t i c a l g o it r h m a n d o p t i ma l c o n t r o l t h e o r y t o o p t i mi z e t h e we i g h t c o e f f i c i e n t s o f t h e a c t i v e s u s p e n s i o n . S i mu l t a n e o u s l y , a n o n l i n e a r v e h i c l e s e mi - a c t i v e s u s p e n s i o n d y n a mi c mo d e l wi t h f o u r d e g r e e o f f r e e d o m i s e s t a b l i s h e d b y u t i l i z i n g t h e MAT L AB / S i mu l i n k
《2024年基于智能控制的汽车主动悬架控制策略研究》范文
《基于智能控制的汽车主动悬架控制策略研究》篇一一、引言随着汽车工业的快速发展,汽车主动悬架系统已经成为现代汽车安全与舒适性的重要组成部分。
通过采用先进的控制策略,主动悬架系统可以有效地提高车辆的行驶稳定性、乘坐舒适性以及操控性能。
本文将重点研究基于智能控制的汽车主动悬架控制策略,旨在为汽车悬架系统的优化设计提供理论依据和技术支持。
二、汽车主动悬架系统概述汽车主动悬架系统是一种具有自适应能力的悬架系统,通过传感器实时监测路面状况和车辆运动状态,采用先进的控制算法对悬架进行实时调整,以实现最佳的行驶性能。
与传统的被动悬架系统相比,主动悬架系统具有更高的灵活性和适应性。
三、智能控制在汽车主动悬架系统中的应用智能控制技术在汽车主动悬架系统中发挥着重要作用。
通过采用先进的控制算法和传感器技术,实现对车辆运动状态的实时监测和调整。
常见的智能控制策略包括模糊控制、神经网络控制、遗传算法等。
这些控制策略可以根据不同的道路条件和驾驶需求,对悬架系统进行实时调整,以实现最佳的行驶性能。
四、基于智能控制的汽车主动悬架控制策略研究(一)控制策略设计本文提出一种基于模糊控制的汽车主动悬架控制策略。
该策略通过建立模糊控制器,实现对车辆运动状态的实时监测和调整。
模糊控制器采用输入输出映射的方法,将传感器采集的信号进行模糊化处理,然后根据预设的规则进行决策,最后输出控制信号对悬架系统进行调整。
(二)仿真分析为了验证所提出的控制策略的有效性,本文采用仿真分析的方法。
通过建立车辆动力学模型和主动悬架系统模型,对所提出的控制策略进行仿真测试。
仿真结果表明,该控制策略可以有效地提高车辆的行驶稳定性、乘坐舒适性以及操控性能。
五、实验验证与结果分析为了进一步验证所提出的控制策略的实用性,本文进行了实验验证。
通过在实车上进行实验测试,对比传统被动悬架系统和所提出的主动悬架控制策略在不同道路条件下的性能表现。
实验结果表明,所提出的基于智能控制的汽车主动悬架控制策略在提高车辆行驶稳定性、乘坐舒适性以及操控性能方面具有显著优势。
基于lqg方法的汽车主动悬架控制力的研究
基于lqg方法的汽车主动悬架控制力的研究
作为一种主动悬架系统,机动车悬架自适应控制系统有效改善了机动车悬架参数和行
驶性能。
利用LQG控制技术优化机动车主动悬架控制力,有助于更加精确调节和稳定悬架
系统,能够更好地满足行车要求。
LQG控制是一种综合了线性和非线性技术、采用最优分析方法设计的控制技术。
这里,LQG控制方法以线性系统为基础,通过构建合适的观测器和控制器,加以随机调节控制非
线性悬架系统,进而精确控制悬架所改变的震振。
在实际研究中,首先确定出机动车悬架系统的线性等效模型,构建LQG控制器,将系
统的状态变量投影到观测器状态空间,给出观测器状态的估计,同时建立相应的误差函数,设计出在系统最优响应的情况下出现最小均方根值的LQG控制器,保证控制器的稳定性。
最后,综合采用MATLAB平台实现只考虑汽车行程参数的悬架车控制,研究其加速状
态和减速状态下悬架系总力关系,并且结合实际应用检验耦合LQG控制器控制力的性能,
最终达到了汽车良好的悬架行驶参数和性能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于LQR 控制的主动悬架优化设计摘要:根据汽车行驶性能的要求,本文以1/4车辆模型为例,建立汽车的动力学模型,利用线性二次最优控制理论对主动悬架的LQG 控制器进行设计,并运用MATLAB/simulink 对汽车动力学模型进行仿真。
结果表明: 具有 LQG 控制器的主动悬架对车辆行驶 平稳性和乘坐舒适性的改善有良好效果。
关键词:主动悬架;被动悬架;LQG 控制器 引言悬架系统是汽车的重要部件, 对于汽车的平顺性、操稳性和 安全性都有着重要的影响, 而主动悬架是悬架发展的必然方向。
控制器的设计对于主动悬架性能的发挥起着重要的作用, 本文中以1/4汽车主动悬架为研究对象,建立汽车动力学模型和设计LQG 控制器算法,应用Matlab/Simulink 进行汽车系统的控制仿真。
1 基于线性二自由度汽车模型的建立 1.1 被动悬架系统的建立车辆悬架系统是一个多输入多数徐彤,为了研究的方便性以及更好地与车辆行驶的情况相吻合,文本一1/4车辆模型为研究对象,车辆模型如图1所示。
图1:被动悬架车辆1/4模型根据图1所示,建立一个被动悬架车辆1/4模型,首先建立运动微分方程:()()()()()b b s b w s b w w w t w g s b w s b w m x K x x C x x m x K x x K x x C x x =----⎧⎪⎨=--+-+-⎪⎩整理得:⎪⎪⎩⎪⎪⎨⎧+--+-+-+-=-+-+-+-=gw t b w t s b w s b w s b w s w b b s b b s w b s b s bx m K x m K K x m K x m C x m C x x m K x m K x m C xb m C x (1) 式中:s C 为悬架阻尼,s K 为悬架刚度。
选取状态变量和输入向量为:[]w bw b x x x xX = g x U =则可将系统运动方程及路面激励写成状态空间矩阵形式,即:BU AX X+= 其中,A 为状态矩阵,B 为输入矩阵,其值如下:⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=0010001ws s w s w s w s bs b s b sbsm K K m K m C m C m K m K m C mC A ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡=000w t m K B 将车身加速度、轮胎动变形、悬架动行程作为性能指标,即:T w b gw b x x x x x Y ][--=将性能指标项写为状态变量以及输入信号的线性组合形式,即:DU CX Y +=其中:⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡---=11001000bb b b m Ks m Ks m Cs m Cs C⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=010D 1.2 被动悬架系统的建立如图2所示,图2:被动悬架车辆1/4模型根据图2所示,建立一个主动悬架车辆1/4模型,首先建立运动微分方程:⎪⎩⎪⎨⎧+--=--+-=••••g w b s b b gw g t w b s w w U x x K x m U x x K x x K x m )()()( (3) 此时矩阵状态矩阵为:⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡---=0010010000w w bb m Ks Kt m Ks m Ks m KsA ⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡-=0000110w w b m m Ktm B ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡--=1100100000b b m Ks m Ks C ⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-=000110b m D1.3 路面模型的建立在分析主动悬架控制过程时,路面输入是一个不可忽略的重要因素,本文利用白噪声信号为路面输入激励,)(2)(2)(000t w U G t x f t x g g ππ+-=•其中,0f 为下截止频率,Hz ;G 0为路面不平度系数,m 3/cycle ;U 0为前进车速,m/sec ;w为均值为零的随机输入单位白噪声。
上式表明,路面位移可以表示为一随机滤波白噪声信号。
这种表示方式来源于试验所测得的路面不平度功率谱密度(PSD )曲线的形状。
我们可以将路面输入以状态方程的形式加到模型中:⎪⎩⎪⎨⎧=+=•XC Y WF X A X road road road road road 1,2,2,000==-==road road road g road C UG B f A x X ππ;D=0;考虑路面为普通路面,路面不平系数G 0=5e-6m 3/cycle ;车速U 0=20m/s ;建模中,路面随机白噪声可以用随机数产生(Random Number )或者有限带宽白噪声(Band-Limited White Noise )来生成。
本文噪声已经由TIN4文件已经给出,运用MATLAB/simulink 建立仿真模型如下:图3: 路面模型2 性能指标的确定LQG 控制设计中的目标性能指数J 即车身加速度、悬架动行程和位移的加权平方和的积分值,表示如下:dt x q x x q x x q TJ Tb w b g w T ⎰••∞→+-+-=0232221])()([1lim为了据此求解状态反馈增益,必须用状态变量以及输入变量来表示上式:dt NU X RU U QX X TJ T T T TT ⎰++=∞→0]21lim其中 Q :对应于状态变量的权重矩阵;R :约束输入信号大小的权重矩阵; N :耦合项。
对于q 1,q 2,q 3表达的性能函数,可以整理为:dt x q x x q x x q TJ Tb w b g w T ⎰••∞→+-+-=0232221])()([1limdt x x x x x Q x x x x x Tw b g w b Tw b gw bT ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=••••∞→⎰00][1lim其中⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=213000000q q q Q 由于DU CX Y +=所以CXQ D U U D Q C X U D Q D U X C Q C X DU CX Q DU CX Y Q Y T T N T T RT T Q T T T T 000000)()(+++=++=式中q 1,q 2,q 3分别为轮胎位移,悬架动行程,车身垂直加速度的加权系数。
因此可以求出Q 、R 、N :⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡--++----+==11122212222222220000000000000000q q q m K q q m K q m K q m K q C Q C Q bSbSbSbST; b T m D Q D R 10==;⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡-=0000s s TK K D Q C N ;利用MATLAB 函数LQR 来计算状态反馈K :),,,,(][N R Q B A lqr E S K =其中,K 为最优状态反馈矩阵;S 为Riccati 方程解;E 为系统特征值。
因此可以得到主动控制力U=-KX 。
)(54321g w b w b x k x k x k x k x k U ++++-=••加权系数的选取决定悬架的性能,如果车身垂直加速度加权系数较大,则可以提高乘坐的舒适性;若轮胎动位移的加权系数较大,则车辆的操纵稳定性较好。
3 仿真分析车辆的各个参数会在附录程序中给出,根据要求建立simulink 模型为:图4:simulink 模型图5:车身加速度对比图6:悬架工作空间对比图7:轮胎位移对比图8:主动悬架与被动悬架的幅频对比4总结本文首先建立了二自由度1/4车体模型。
并运用线性二次最优化理论设计了车辆主动悬架的LQG控制器。
借助MATLAB/Simulink软件进行仿真分析。
分析结果表明,所设计的最优主动悬架显著地降低了车身的垂向振动加速度。
与被动悬架相比,采用LQG控制器的悬架动行程和车轮动位移也都得到了良好的改善。
所以基于线性二次最优控制理论进行的主动悬架LQG控制器的设计是行之有效的。
附录:run TIN4;Mb=320; % 簧上质量Mw=40; % 簧下质量Ks=2*10^4; % 悬架弹簧刚度Kt=10*Ks; % 轮胎等效刚度Cs=1000; % 悬架减振器阻尼G0=16e-6; % 路面不平度系数U0=20; % 车辆速度f0=0.1; % 下截止频率q1=100; % 悬架动行程加权系数q2=1000; % 轮胎动载荷加权系数q3=0.05; % 车身加速度加权系数n0=0.1; %参考空间频率Tin=(0:0.01:100)';wr=[Tin w1];[pb,fsb]=pwelch(wr,[],[],1024,400,'onesided');%生成高斯白噪声功率谱密度%路面输入状态空间A=-2*pi*f0;B=2*n0*pi*sqrt(G0*U0);C=1;D=0;%被动悬架状态空间A1=[-Cs/Mb,Cs/Mb,-Ks/Mb,Ks/Mb;Cs/Mw,-Cs/Mw,Ks/Mw,-(Ks+Kt)/Mw;1,0,0,0; 0,1,0,0];B1=[0;Kt/Mw;0;0];C1=[-Cs/Mb,Cs/Mb,-Ks/Mb,Ks/Mb;0,0,0,1;0,0,1,-1];D1=[0;-1;0];%主动悬架状态空间%A2=[0,0,-Ks/Mb,-Ks/Mb;0,0,-Ks/Mw,-(Kt+Ks)/Mw;1,0,0,0;0,1,0,0];A2=A1;B2=[0,1/Mb;Kt/Mw,-1/Mw;0,0;0,0];%输出三个C2=[0,0,-Ks/Mb,Ks/Mb;0,0,0,1;0,0,1,-1];D2=[0,1/Mb;-1,0;0,0];%数出四个C3=diag([1,1,1,1]);D3=[0,0;0,0;0,0;0,0];%Q、R、NQ0=[q3,0,0;0,q1,0;0,0,q2];Q=[0,0,0,0;0,0,0,0;0,0,Ks*Ks*q3/(Mb*Mb)+q2,-Ks*Ks*q3/(Mb*Mb)-q2;0,0,-Ks*Ks*q3/(Mb*Mb)-q2,Ks*Ks*q3/(Mb*Mb)+q1+q2];R=[q1,0;0,q3/(Mb*Mb)];N=[0,0;0,0;0,-Ks*q3/(Mb*Mb);-q1,Ks*q3/(Mb*Mb)];[K,S,E]=lqr(A2,B2,Q,R,N); K=K(2,:)。