Effect of electromagnetic force and anode gas on electrolyte flow in aluminum electrolysis cell
基于Ansys-Maxwell的矿用电磁铁优化和仿真
starting electromagnetic force of the mining electromagnet increases from 3.47 N to 13.9 Nꎬ which is far greater than the opening
高电磁铁的启动电磁力ꎮ
2 电磁铁启动电磁力有限元仿真优化
由于用户要求电磁铁的外形尺寸不变ꎬ因此在仿真优
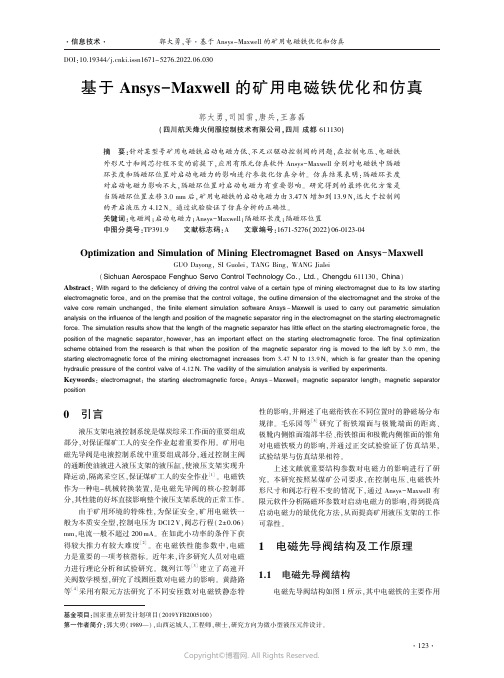
推动先导阀芯ꎬ当先导阀入口压力下降代表先导阀导通ꎬ
化时需要保留线圈尺寸、衔铁尺寸、阀芯行程和激励安匝
此时测力计上的值即为先导阀打开时作用力大小ꎮ 从图
数不变ꎮ 通过对矿用电磁铁结构分析发现ꎬ其特殊之处在
磁力的不断增加ꎬ当电磁力大于复位弹簧力时ꎬ阀芯吸合
( 电磁铁阀芯与推杆之间为螺纹配合连接) ꎬ推杆推动杠
杆ꎬ使对侧的先导阀芯运动ꎬ先导阀芯克服弹簧力和液压
力ꎬ先导阀打开ꎻ当电磁铁断电时ꎬ先导阀芯在液压力和先
导阀复位弹簧力的作用下复位ꎬ电磁铁阀芯也在复位弹簧
力作用下复位ꎮ
图 3 电磁铁启动电磁力测试试验
圈安匝数为 380 Aꎬ求解设置中最大收敛步数为 10ꎬ收敛
百分比误差为 1%ꎬ每步细化百分比为 30%ꎬ非线性残差
为 0.000 1ꎮ
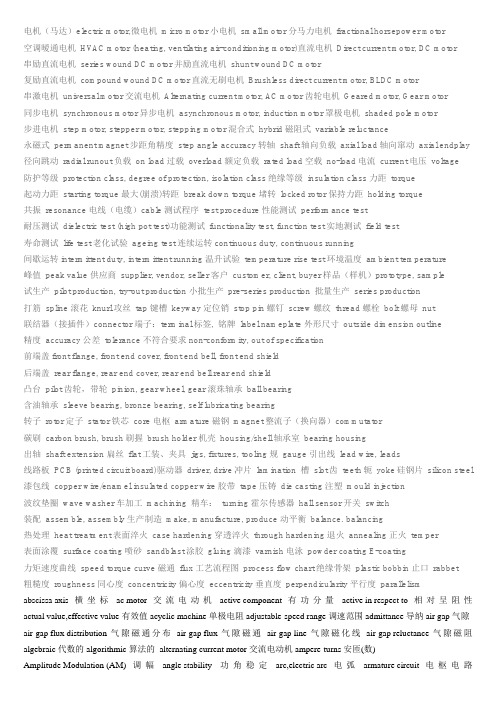
(a) K-(J8 mm
在原电磁铁结构中隔磁环长度 h2 = 3.0 mmꎬ隔磁环下
端面距导向筒下端面距离 h1 = 7.5 mmꎬ由于线圈尺寸和衔
IG- PHYSICS Chapter 20 Electromagnetic forces

考试Chapter20Electromagnetic forces【10】1The current in a coil produces a magnetic fieldaround it,as shown.The magnitude of the potential difference acrossthe coil is increased and its direction isreversed.右手抓握定则What happens to the magnetic field?A The lines become closer together and theright-hand end becomes a south pole.B The lines become closer together and the right-hand end remains a north pole.C The lines become further apart and the right-hand end becomes a south pole.D The lines become further apart and the right-hand end remains a north pole.2An electric current can produce a heating effect and a magnetic effect.Which row shows the effect that a relay继电器uses and one application of a relay?左手定则3Anα-particle is positiveand it enters a uniformmagnetic field directed out ofthe page.In which direction is theα-particle deflected by thefield?A into the pageB out of pageC to the leftD to the right4The diagrams show different particlesmoving through a magnetic field.Proton is positive.只有2个选项。
爱迪生成功的故事英语

爱迪生成功的故事英语The Life of Thomas EdisonGenius is 1% inspiration and 99% perspiration.Thomas EdisonEdison was an inventor known for his influence, his intelligence and, most importantly, his perseverance. During his lifetime more than a thousand American patents were granted on work of his own or of teams under his supervision. Three of his inventionsthe phonograph, a practical incandescent light and electric system, and a moving picture camerahelped found giant industries that were to change the life and leisure of the world. In other areas Edison managed to affect over twenty industries including the military, medical fields (with his fluoroscope), the stock market and mining. Following is a short biography and a timeline of his greatest accomplishments.Inspiring Childhood. Thomas Edison, the youngest of seven children, was born in Milan, Ohio, on February 11, 1847, to Samuel and Nancy Edison. Home schooled and an avid reader, Edison began his scientific experiments at the age of ten when he built a laboratory in the basement of his house stocked with chemicals he either bought or found in the town dump. Edisons early experimentation was almost stopped when his mother became tired of bad odors and fumes filling the house.The Tramp Telegrapher. Edison left the laboratory behind for a career as a candy butcher on the Grand Trunk Railway in 1859, selling candy, dried fruit, snacks and newspapers. Three years later he made history when he began to publish his own newspaper, the Weekly Herald, aboard the train. The first newspaper to be published aboard a moving train, the Weekly Herald, was printed on a secondhand printing press Edison set up in the baggage car of the train. In 1863, he began his first career as a tramp telegrapher, going from place to place including Ontario, Cincinatti andNashville, offering his skills as a telegrapher. He finally settled in Boston, working the New York wire for Western Union.Learning to be Practical. It was in Boston that Edison began experimenting in a more professional way than ever before, first studying Michael Faradys writings on electricity. His first patent in 1868, was a vote recorder which sped up, through electrical messages, the counting of votes for assemblies and meetings. Finding no buyer for his first invention, he formed a policy to never attempt to invent anything unless he was sure there was a commercial demand for it. His next invention demonstrated his commitment to this ideal, a stock ticker that would bring brokers Wall Street quotations more quickly.Pure Science Experiments. With two notable exceptions, Edison rarely dabbled in anything other than the practical application of principles and scientific theories. In 1875, while working on a theory of electromagnets and telegraphy, Edison discovered a type of energy between electromagnetism and heat and light. Named etheric force, this discovery revealed the existence of the electromagnetic wave and prompted the invention of the radio in the 1890s. The second time was with his discovery of the Edison Effect, the basis for the whole field of electronics. Edison discovered that a valve could be created for an electronic current by inserting a metal plate within the filament of an electric light bulb. The Menlo Park Laboratory. Edisons laboratory at Menlo Park, New Jersey became the first of its kind, the original organized technical research laboratory, with its research team. Inventions that came out of this new research include the mimeograph machine, the phonograph, the light bulb, and many others.First of the Great Inventions The phonograph, the light bulb and the motion picture camera have long been considered Edisons greatest inventions. The phonograph, the first of these inventions, was developedafter Edison began work on improving Alexander Graham Bells telephone. Edison believed that the phonograph (which has changed very little from its original design) was his greatest invention. Interestingly enough, the phonograph is the only invention for which Edison can claim sole ownership.Early Movie Business. Other inventors were experimenting with the motion-picture camera when, in 1891, Edison came up with the practical movie camera, or the Kinetograph (moving writing), and a projector, the Kinetoscope (moving view), to show his movies. The first movie studio built in 1893, was his Black Maria at West Orange, New Jersey. Edison, who had been working unsuccessfully on talkies by combining the phonograph and the camera, left the motion picture business when the industry started to turn away from the educational purpose he saw for it and towards entertainment. Edison was quoted as saying A good many people seemed to wonder why I did so [quit the movie business] maybe they still wonder. But the answer is simple enough. I was an inventor an experimenter. I wasnt a theatrical producer. And I had no ambitions to become one. Incidentally, movie audiences would not hear the human voice on film until 1927 with Al Jolsons The Jazz Singer.The Light Bulb. Edison is quoted as saying it would take a matter of a few weeks to invent the bulb. In reality, it would take him almost two years of failed attempts, new discoveries and prototypes before he would find success. It is said he tried over 6,000 different carbonized plant fibers, looking for a carbon filament for his light bulb. By concentrating and inventing a whole lighting system rather than just a single light bulb, Edison succeeded where others had failed. Edison chose to look at the big picture and created a lighting system including wiring, plugs, connectors, etc., to operate more than one light bulb at once. Fighting other inventors in courts from England to America, Edison struggled for years to claimhis rightful title of inventor of the light bulb, possibly his most popular invention.Military Inventions of the War Years! During World War I, Edison became the head of the Naval Consulting Board, and for three years he worked on inventions to help the U. S. Navy. Working on antisubmarine tactics, Edison worked to combat the Germans in the Atlantic wars. His inventions included devices that could detect torpedoes as soon as they were fired, a loud-speaking telephone so that a conversation could be carried on in the middle of a battle, and a glare eliminator to make it possible for ships to see periscopes with the bright sunlight shining on the water.Medical Breakthroughs In 1896, Edison invented the practical fluoroscope, a machine which included a screen made out of tungstate of calcium on which you view X-rays. Edison refused to take a patent out on his fluoroscope because he wanted to see it in use, helping people, immediately. The fluoroscope enabled surgeons to perform the first x-ray operation in the United States.The Perseverant Inventor One of Edisons most famous qualities was his perseverance. While working on the nickel/iron storage battery, he performed 10,296 experiments. Throughout his inventing career, Edison followed almost every unsuccessful venture with a successful idea. He stuck to his creed of working on only useful and wanted inventions and changed the world with his drive for success. When Edison died October 18, at his home in West Orange, New Jersey, he left behind a legacy of breakthroughs in technology and science.。
95_54_EC(1995) 防范当引擎火星点火时的电波干扰

COMMISSION DIRECTIVE 95/54/ECof 31 October 1995adapting to technical progress Council Directive 72/245/EEC on the approximation of the laws of the Member States relating to the suppression of radio interference produced by spark-ignition engines fitted to motor vehicles and amending Directive 70/156/EEC on the approximation of the laws of the Member States relating to the type-approval of motor vehicles and their trailers THE COMMISSION OF THE EUROPEAN COMMUNITIES,Having regard to the Treaty establishing the European Community,Having regard to Council Directive 70/156/EEC of 6 February 1970 on the approximation of the laws of the Member States relating to the type-approval of motor vehicles and their trailers (1), as last amended by Commission Directive 93/81/EEC (2), and in particular Article 13 (2) thereof,Having regard to Council Directive 72/245/EEC of 20 June 1972 on the approximation of the laws of the Member States relating to the suppression of radio interference produced by spark-ignition engines fitted to motor vehicles (3), as amended by Commission Directive 89/491/EEC (4), and in particular Article 4 thereof,Whereas Directive 72/245/EEC is one of the separate directives of the EEC type-approval procedure which was established pursuant to Directive 70/156/EEC; whereas, consequently, the provisions laid down in Directive 70/156/EEC relating to vehicle systems, components and separate technical units apply to this Directive;Whereas, in particular, Articles 3 (4) and 4 (3) of Directive 70/156/EEC require each separate directive to have attached to it an information document incorporating the relevant items of Annex I to that Directive and also a type-approval certificate based on Annex VI thereto in order that type-approval may be computerized;Whereas Directive 72/245/EEC contained the earliest measures endeavouring to bring about a basic electromagnetic compatibility regarding radio interference, since which time technical progress has increased the complexity and diversity of electrical and electronic equipment; Whereas, in view of the increasing concern about the technological developments in electrical and electronic equipment and the need to ensure the general compatibility of different electrical and electronic equipment, Council Directive 89/336/EEC (5), as last amended by Directive 93/68/EEC (6), laid down general provisions regarding electromagnetic compatibility for all products;Whereas Directive 89/336/EEC established the rule that, in so far as protection requirements specified in that Directive were harmonized, its general provisions would not apply or would cease to apply with regard to apparatus covered by specific directives;(1) OJ No L 42, 23. 2. 1970, p. 1.(2) OJ No L 264, 23. 10. 1993, p. 49.(3) OJ No L 152, 6. 7. 1972, p. 15.(4) OJ No L 238, 15. 8. 1989, p. 43.(5) OJ No L 139, 23. 5. 1989, p. 19.(6) OJ No L 220, 30. 8. 1993, p. 1.Whereas in the field of vehicles, their components and separate technical units, it is necessary to envisage a specific directive within the framework of the system for European type-approval which provides for approvals granted by designated national authorities to harmonized technical requirements;Whereas Directive 72/245/EEC should become such a specific directive;Whereas reference is made to electromagnetic compatibility in other directives relating to vehicles, their components and separate technical units, within the framework of Directive 70/156/EEC;Whereas the technical requirements relating to the radio interference (electromagnetic compatibility) of vehicles, their components and systems should be governed from 1 January 1996 solely by the provisions of Directive 72/245/EEC;Whereas it is necessary to amend Directive 70/156/EEC to reflect the extension of Directive 72/245/EEC to all vehicle categories;Whereas it is necessary to refer to Council Directive 72/306/EEC (1), as amended by Directive 89/491/EEC, in order to distinguish between spark and compression ignition engines;Whereas the measures provided for in this Directive are in accordance with the opinion of the Committee for Adaptation to Technical Progress established by Directive 70/156/EEC,HAS ADOPTED THIS DIRECTIVE:(1) OJ No L 190, 20. 8. 1972, p. 1.Article 1Directive 72/245/EEC is hereby amended as follows:1. the title shall be replaced by the following:'Council Directive 72/245/EEC of 20 June 1972 relating to the radio interference (electromagnetic compatibility) of vehicles';2. Article 1 shall be replaced by the following:'Article 1For the purpose of this Directive, "vehicle" means any vehicle as defined in Directive 70/156/EEC.';3. Article 2 shall be replaced by the following:'Article 2No Member State may refuse to grant EEC type-approval or national type-approval of a vehicle, component or separate technical unit on grounds relating to electromagnetic compatibility if the requirements of this Directive are fulfilled.';4. Article 3 shall be replaced by the following:'Article 31. This Directive shall constitute a "specific directive" for the purposes of Article 2 (2) of Council Directive 89/336/EEC (*) with effect from 1 January 1996.2. Vehicles, components or separate technical units approved pursuant to this Directive shall be considered to fulfil the provisions of other directives, cited in Annex IV to Council Directive 92/53/EEC (**), which refer to electromagnetic compatibility.(*) OJ No L 139, 23. 5. 1989, p. 19.(**) OJ No L 225, 10. 8. 1992, p. 1.';5. The Annexes shall be replaced by the Annex to this Directive.Article 21. With effect from 1 December 1995, Member States may not, on grounds relating to electromagnetic compatibility:- refuse, in respect of any given type of vehicle, to grant EEC type-approval or national type-approval,- refuse, in respect of any given type of component or separate technical unit, to grant EEC component or technical unit type-approval, or- prohibit the registration, sale or entry into service of vehicles,- prohibit the sale or use of components or separate technical units,if the vehicles, components or separate technical units comply with the requirements of Directive 72/245/EEC as amended by this Directive.2. With effect from 1 January 1996, Member States:- shall no longer grant EEC vehicle type-approval, EEC component type-approval or EEC separate technical unit type-approval, and- may refuse to grant national type-approval,for any type of vehicle, component or separate technical unit on grounds relating to electromagnetic compatibility, if the requirements of Directive 72/245/EEC, as amended by this Directive, are not fulfilled.3. Paragraph 2 shall not apply to vehicle types approved before 1 January 1996 pursuant to Directive 72/306/EEC nor to any subsequent extensions to these approvals.4. With effect from 1 October 2002, Member States:- shall consider certificates of conformity which accompany new vehicles in accordance with the provisions of Directive 70/156/EEC to be no longer valid for the purposes of Article 7 (1) of that Directive,- may refuse the registration, sale or entry into service of new vehicles which are not accompanied by a certificate of conformity in accordance with Directive 70/156/EEC, and- may refuse the sale and entry into service of new electrical/electronic sub-assemblies as components or separate technical unit,if the requirements of this Directive are not fulfilled.5. With effect from 1 October 2002 the requirements of Directive 72/245/EEC, relating to electrical/electronic sub-assemblies as components or separate technical units, as amended by this Directive, are applicable for the purposes of Article 7 (2) of Directive 70/156/EEC.6. Notwithstanding paragraphs 2 and 5, for the purposes of replacement parts, Member States shall continue to grant EEC type approval and to permit the sale and entry into service of components or separate technical units intended for use on vehicle types which have been approved before 1 January 1996 pursuant to either Directive 72/245/EEC or Directive72/306/EEC and, where applicable, subsequent extensions to these approvals.Article 3Item No 10 of Part I of Annex IV to Directive 70/156/EEC shall be amended to include an 'X' in each of the columns for vehicle category 0 under the heading 'Applicability'.Article 41. Member States shall bring into force the laws, regulations and administrative provisions necessary to comply with this Directive before 1 December 1995. They shall forthwith inform the Commission thereof.When Member States adopt these provisions, these shall contain a reference to this Directive or shall be accompanied by such reference at the time of their official publication. The procedure for such reference shall be adopted by Member States.2. Member States shall communicate to the Commission the texts of the main provisions of national law which they adopt in the field covered by this Directive.Article 5This Directive shall enter into force on the 20th day following its publication in the Official Journal of the European Communities.Article 6This Directive is addressed to the Member States.Done at Brussels, 31 October 1995.For the CommissionMartin BANGEMANNMember of the CommissionLIST OF ANNEXESANNEX 1 Requirements to be met by vehicles and electrical/electronic sub-assemblies fitted to a vehicle.ANNEX IIA Model information document for EEC type-approval of a vehicle with respect to electromagnetic compatibility.ANNEX IIB Model information document for EEC type-approval of an electrical/electronic sub-assembly with respect to electromagnetic compatibility.ANNEX IIIA Model: EEC type-approval certificate (vehicle)ANNEX IIIB Model: EEC type-approval certificate (electrical/electronic sub-assembly) ANNEX IV Method of measurement of radiated broadband electromagnetic emissions from vehicles.ANNEX V Method of measurement of radiated narrowband electromagnetic emissions from vehicles.ANNEX VI Method of testing for immunity of vehicles to electromagnetic radiation. ANNEX VII Method of measurement of radiated broadband electromagnetic emissions from electrical/electronic sub-assemblies.ANNEX VIII Method of measurement of radiated narrowband electromagnetic emissions from electrical/electronic sub-assemblies.ANNEX IX Method (s) of testing of immunity of electrical/electronic sub-assemblies to electromagnetic radiation.ANNEX IREQUIREMENTS TO BE MET BY VEHICLES AND ELECTRICAL/ELECTRONIC SUB-ASSEMBLIES FITTED TO A VEHICLE1. Scope1.1. This Directive applies to the electromagnetic compatibility of vehicles covered in Article 1, being vehicles or trailers (hereinafter referred to as vehicle(s)) as supplied by the vehicle manufacturer and to components or separate technical units intended for fitment in vehicles.2. Definitions2.1. For the purposes of this Directive:2.1.1. 'Electromagnetic compatibility' means the ability of a vehicle or component(s) or separate technical unit(s) to function satisfactorily in its electromagnetic environment without introducing intolerable electromagnetic disturbances to anything in that environment.2.1.2. 'Electromagnetic disturbance' means any electromagnetic phenomenon which may degrade the performance of a vehicle or component(s) or separate technical unit(s). An electromagnetic disturbance may be electromagnetic noise, an unwanted signal or a change in the propagation medium itself.2.1.3. 'Electromagnetic immunity' means the ability of a vehicle or component(s) or separate technical unit(s) to perform without degradation of performance in the presence of specified electromagnetic disturbances.2.1.4. 'Electromagnetic environment' means the totality of electromagnetic phenomena existing at a given location.2.1.5. 'Reference limit' means the nominal level to which type approval and conformity of production limit values are referenced.2.1.6. 'Reference antenna' for the frequency range 20 to 80 MHz: means a shortened balanced dipole being a half wave resonant dipole at 80 MHz, and for the frequency range above 80 MHz: means a balanced half wave resonant dipole tuned to the measurement frequency.2.1.7. 'Broadband emission' means an emission which has a bandwidth greater than that of a particular measuring apparatus or receiver.2.1.8. 'Narrowband emission' means an emission which has a bandwidth less than that of a particular measuring apparatus or receiver.2.1.9. 'Electrical/electronic system' means (an) electrical and/or electronic device(s) or set(s) of devices together with any associated electrical connections which form part of a vehicle but which are not intended to be type approved separately from the vehicle.2.1.10. 'Electrical/electronic sub-assembly' (ESA) means an electrical and/or electronic device or set(s) of devices intended to be part of a vehicle, together with any associated electrical connections and wiring, which performs one or more specialized functions. An ESA may be approved at the request of a manufacturer as either a 'component' or a 'separate technical unit (STU)' (see Directive 70/156/EEC, Article 2).2.1.11. 'Vehicle type' in relation to electromagnetic compatibility means vehicles which do not differ essentially in such respects as:2.1.11.1. the overall size and shape of the engine compartment;2.1.11.2. the general arrangement of the electrical and/or electronic components and the general wiring arrangement;2.1.11.3. the primary material of which the body or shell (if applicable) of the vehicle is constructed (for example, a steel, aluminium or fibreglass body shell). The presence of panels of different material does not change the vehicle type provided the primary material of the body is unchanged. However, such variations must be notified.2.1.12. An 'ESA type' in relation to electromagnetic compatibility means ESAs which do not differ in such essential respects as:2.1.12.1. the function performed by the ESA;2.1.12.2. the general arrangement of the electrical and/or electronic components, if applicable.3. Application for EEC type-approval3.1. Approval of a vehicle type3.1.1. The application for approval of a vehicle type, with regard to its electromagnetic compatibility pursuant to Article 3 (4) of Directive 70/156/EEC shall be submitted by the vehicle manufacturer.3.1.2. A model for the information document is given in Annex IIA.3.1.3. The vehicle manufacturer shall draw up a schedule describing all projected combinations of relevant vehicle electrical/electronic systems or ESAs, body styles (1), variations in body material (1), general wiring arrangements, engine variations, left-hand/right-hand drive versions and wheelbase versions. Relevant vehicle electrical/electronic systems or ESAs are those which may emit significant broadband or narrowband radiation and/or those which are involved in the driver's direct control (see paragraph 6.4.2.3 of this Annex) of the vehicle.3.1.4. A representative vehicle shall be selected from this schedule for the purpose of being tested, in mutual agreement between the manufacturer and the competent authority. This vehicle shall represent the vehicle type (see Appendix 1 to Annex IIA). The choice of vehicle shall be based on the electrical/electronic systems offered by the manufacturer. One more vehicle may be selected from this schedule for the purpose of being tested if it is considered by mutual agreement between the manufacturer and the competent authority that different electrical/electronic systems are included which are likely to have a significant effect on the vehicle's electromagnetic compatibility compared with the first representative vehicle.3.1.5. The choice of the vehicle(s) in conformity with paragraph 3.1.4 is limited to vehicle/electrical/electronic system combinations intended for actual production.3.1.6. The manufacturer may supplement the application with a report from tests which have been carried out. Any such data provided may be used by the approval authority for the purpose of drawing up the type-approval certificate.(1) If applicable.3.1.7. If the technical service responsible for the type-approval test carries out the test itself, then a vehicle representative of the type to be approved, according to paragraph 3.1.4 shall be provided.3.2. Approval of a type of ESA3.2.1. The application for approval of a type of ESA with regard to its electromagnetic compatibility pursuant to Article 3 (4) of Directive 70/156/EEC shall be submitted by the vehicle manufacturer or by the manufacturer of the ESA.3.2.2. A model for the information document is given in Annex IIB.3.2.3. The manufacturer may supplement the application with a report from tests which have been carried out. Any such data provided may be used by the approval authority for the purpose of drawing up the type-approval certificate.3.2.4. If the technical service responsible for the type-approval test carries out the test itself, then a sample of the ESA system representative of the type to be approved shall be provided, if necessary, after discussion with the manufacturer on, for example, possible variations in the layout, number of components, number of sensors. If the technical service deems it necessary, it may select a further sample.3.2.5. The sample(s) must be clearly and indelibly marked with the manufacturer's trade name or mark and the type designation.3.2.6. Where applicable, any restrictions on use should be identified. Any such restrictions should be included in Annexes IIB and/or IIIB.4. Type-approval4.1. Routes to type-approval4.1.1. Type-approval of a vehicleThe following alternative routes to type-approval of a vehicle may be used at the discretion of the vehicle manufacturer.4.1.1.1. Approval of a vehicle installationA vehicle installation may achieve type-approval directly by following the provisions laid down in paragraph 6 of this Annex. If this route is chosen by a vehicle manufacturer, no separate testing of electrical/electronic systems or ESAs is required.4.1.1.2. Approval of vehicle type by testing of individual ESAsA vehicle manufacturer may obtain approval for the vehicle by demonstrating to the approval authority that all the relevant (see paragraph 3.1.3 of this Annex) electrical/electronic systems or ESAs have individually been approved in accordance with this Directive and have been installed in accordance with any conditions attached thereto.4.1.1.3. A manufacturer, if he wishes, may obtain approval to this Directive if the vehicle has no equipment of the type which is subject to immunity or emission tests. The vehicle shall have no systems as specified in paragraph 3.1.3 (immunity) and no spark ignition equipment. Such approvals do not require testing.4.1.2. Type-approval of an ESAType-approval may be granted to an ESA to be fitted either to any vehicle type or to a specific vehicle type or types requested by the manufacturer. ESAs involved in the direct control of vehicles will normally receive type-approval in conjunction with a vehicle manufacturer.4.2. Granting of type-approval4.2.1. Vehicle4.2.1.1. If the representative vehicle fulfils the requirements of this Directive, EEC type-approval pursuant to Article 4 (3), and if applicable, Article 4 (4) of Directive 70/156/EEC shall be granted.4.2.1.2. A model for the EEC type-approval certificate is given in Annex IIIA.4.2.2. ESA4.2.2.1. If the representative ESA system(s) fulfil(s) the requirements of this Directive, EEC type-approval pursuant to Article 4 (3), and if applicable, Article 4 (4) of Directive 70/156/EEC shall be granted.4.2.2.2. A model for the EEC type-approval certificates is given in Annex IIIB.4.2.3. In order to draw up the certificates referred to in paragraph 4.2.1.2 or 4.2.2.2, the competent authority of the Member State granting the approval may use a report prepared by an approved or recognized laboratory or in accordance with the provisions of this Directive.4.3. Amendments to approvals4.3.1. In the case of amendments to approvals granted pursuant to this Directive, the provisions of Article 5 of Directive 70/156/EEC shall apply.4.3.2. Amendment of a vehicle type-approval by ESA addition or substitution.4.3.2.1. Where a vehicle manufacturer has obtained approval for a vehicle installation and wishes to fit an additional or substitutional electrical/electronic system or ESA which has already received approval pursuant to this Directive, and which will be installed in accordance with any conditions attached thereto, the vehicle approval may be amended without further testing. The additional or substitutional electrical/electronic system or ESA shall be considered as part of the vehicle for conformity of production purposes.4.3.2.2. Where the additional or substitutional part(s) has (have) not received approval pursuant to this Directive, and if testing is considered necessary, the whole vehicle shall be deemed to comply if the new or revised part(s) can be shown to comply with the relevant requirements of paragraph 6 or if, in a comparative test, the new part can be shown not to be likely to adversely affect compliance of the vehicle type.4.3.2.3. The addition by a vehicle manufacturer to an approved vehicle of standard domestic or business equipment, other than mobile communication equipment (*) which complies with Directive 89/336/EEC, and is installed according to the recommendations of the equipment and vehicle manufacturers, or the substitution or removal thereof, shall not invalidate the vehicle approval. This shall not preclude vehicle manufacturers fitting communication equipment with suitable installations guidelines developed by the vehicle manufacturer and/or manufacturer(s) of such communication equipment. The vehicle manufacturer shall provide evidence (if requested by the test authority) that vehicle performance is not adversely affected by such transmitters. This can be a statement that the power levels and installationare such that the immunity levels of this Directive offer sufficient protection when subject to transmission alone, i.e. excluding transmission in conjunction with the tests specified in paragraph 6. This Directive does not authorize the use of a communication transmitter when other requirements on such equipment or its use apply. A vehicle manufacturer may refuse to install in his vehicle standard domestic or business equipment which complies with Directive 89/336/EEC.(*) For example: radio telephone and citizens band radio.5. Marking5.1. Every ESA conforming to a type approved pursuant to this Directive shall bear an EEC type-approval mark.5.2. This mark shall consist of a rectangle surrounding the letter 'e' followed by the distinguishing number or letters of the Member State which has granted type-approval:1 Germany2 France3 Italy4 the Netherlands6 Belgium9 Spain11 the United Kingdom13 Luxembourg18 Denmark21 Portugal23 GreeceIRL IrelandIt must also include in the vicinity of the rectangle the four-digit sequential number (with leading zeros as applicable) - hereinafter referred to as 'base approval number' - contained in Section 4 of the type-approval number shown on the EEC type-approval certificate issued for the type of device in question (see Annex IIIB), preceded by the two figures indicating the sequence number assigned to the most recent major technical amendment to Directive 72/245/EEC on the date EEC component type-approval was granted. In this Directive the sequence number is 02.5.3. The EEC type-approval mark must be affixed to the main part of the ESA (e.g. the electronic control unit) in such a way as to be clearly legible and indelible.5.4. An example of the EEC type-approval mark is shown in Appendix 7.5.5. No marking is required for electrical/electronic systems included in vehicle types approved by this Directive.5.6. Markings on ESAs in compliance with paragraph 5.3 need not be visible when the ESA is installed in a vehicle.6. Specifications6.1. General specification6.1.1. A vehicle (and its electrical/electronic system(s) or ESAs) shall be so designed, constructed and fitted as to enable the vehicle, in normal conditions of use, to comply with the requirements of this Directive.6.2. Specifications concerning broadband electromagnetic radiation from vehicles fitted with spark ignition.6.2.1. Method of measurementThe electromagnetic radiation generated by the vehicle representative of its type shall be measured using the method described in Annex IV at either of the defined antenna distances. The choice shall be made by the vehicle manufacturer.6.2.2. Vehicle broadband reference limits6.2.2.1. If measurements are made using the method described in Annex IV using a vehicle-to-antenna spacing of 10,0 ± 0,2 m, the radiation reference limits shall be 34 dB microvolts/m (50 microvolts/m) in the 30 to 75 MHz frequency band and 34 to 45 dB microvolts/m (50 to 180 microvolts/m) in the 75 to 400 MHz frequency band, this limit increasing logarithmically (linearly) with frequencies above 75 MHz as shown in Appendix 1 to this Annex. In the 400 to 1 000 MHz frequency band the limit remains constant at 45 dB microvolts/m (180 microvolts/m).6.2.2.2. If measurements are made using the method described in Annex IV using a vehicle-to-antenna spacing of 3,0 ± 0,05 m, the radiation reference limits shall be 44 dB microvolts/m (160 microvolts/m) in the 30 to 75 MHz frequency band and 44 to 55 dB microvolts/m (160 to 562 microvolts/m) in the 75 to 400 MHz frequency band, this limit increasing logarithmically (linearly) with frequencies above 75 MHz as shown in Appendix 2 to this Annex. In the 400 to 1 000 MHz frequency band the limit remains constant at 55 dB microvolts/m (562 microvolts/m).6.2.2.3. On the vehicle representative of its type, the measured values, expressed in dB microvolts/m, (microvolts/m), shall be at least 2,0 dB (20 %) below the reference limits.6.3. Specifications concerning narrowband electromagnetic radiation from vehicles.6.3.1. Method of measurementThe electromagnetic radiation generated by the vehicle representative of its type shall be measured using the method described in Annex V at either of the defined antenna distances. The choice shall be made by the vehicle manufacturer.6.3.2. Vehicle narrowband reference limits6.3.2.1. If measurements are made using the method described in Annex V using a vehicle-to-antenna spacing of 10,0 ± 0,2 m, the radiation-reference limits shall be 24 dB microvolts/m (16 microvolts/m) in the 30 to 75 MHz frequency band and 24 to 35 dB microvolts/m (15 to 56 microvolts/m) in the 75 to 400 MHz frequency band, this limit increasing logarithmically (linearly) with frequencies above 75 MHz as shown in Appendix 3 of this Annex. In the 400 to 1 000 MHz frequency band the limit remains constant at 35 dB microvolts/m (56 microvolts/m).6.3.2.2. If measurements are made using the method described in Annex V using a vehicle-to-antenna spacing of 3,0 ± 0,05 m, the radiation reference limit shall be 34 dB microvolts/m (50 microvolts/m) in the 30 to 75 MHz frequency band and 34 to 45 dB microvolts/m (50 to 180 microvolts/m) in the 75 to 400 MHz frequency band, this limit increasing logarithmically (linearly) with frequencies above 75 MHz as shown in Appendix 4 to this Annex. In the 400 to 1 000 MHz frequency band the limit remains constant at 45 dB microvolts/m (180 microvolts/m).。
特斯拉的引力动态理论

特斯拉的引力动态理论翻译:艾丽丝原载:/group/topic/20534029/PowerPedia:Tesla's Dynamic Theory of Gravity特斯拉的引力动态理论The Dynamic Theory of Gravity of Dr. Nikola Tesla explains the relation between gravitation and electromagnetic force as a unified field theory (a model over matter, the aether, and energy). It is a unified field theory to unify all the fundamental forces (such as the force between all masses) and particle responses into a single theoretical framework.尼古拉·特斯拉博士的《引力动态理论》解释了万有引力和电磁力之间统一关系的一个理论(一个关于物质、以太和能量的模式)。
它是一个统一场理论,把所有基本的力统一起来(例如是所有物质之间的力)和粒子的反作用力,形成一个单一的理论框架。
Introduction介绍Tesla's proposition that gravity is a field effect is being given more serious consideration by researchers. At the time of his announcement, his critique on Einstein's work was considered by the scientific establishment to exceed the bounds of reason. While this theory is disputed by some or simply ignored by others, it does not change the clear indication of the resurfacing of many supposedly "new" ether based theories by current scientists. Initially developed between 1892 and 1894 during the period in which he was conducting experiments with high frequency and high potential currents and electromagnetism, it was subsequently never officially published. Though these principles guided his future research and experiments, Tesla did not announce his theory until near the end of his life after he had been disillusioned by the war efforts. The Dynamic Theory of Gravity neither appears nor is mentioned anywhere in standard Tesla informative sites and reportedly, is still classified and unavailable under the FOIA.特斯拉的见解是,引力是研究者更加需要严肃对待的一种场效应。
电机行业英语
电机(马达)electric motor,微电机micro motor小电机small motor分马力电机fractional horsepower motor空调暧通电机HVAC motor (heating, ventilating air-conditioning motor)直流电机Direct current motor, DC motor串励直流电机series wound DC motor并励直流电机shunt wound DC motor复励直流电机compound wound DC motor直流无刷电机Brushless direct current motor, BLDC motor串激电机universal motor交流电机Alternating current motor, AC motor齿轮电机Geared motor, Gear motor同步电机synchronous motor异步电机asynchronous motor, induction motor罩极电机shaded pole motor步进电机step motor, stepper motor, stepping motor混合式hybrid磁阻式variable reluctance永磁式permanent magnet步距角精度step angle accuracy转轴shaft轴向负载axial load轴向窜动axial endplay 径向跳动radial runout负载on load过载overload额定负载rated load空载no-load电流current电压voltage防护等级protection class, degree of protection, isolation class绝缘等级insulation class力距torque起动力距starting torque最大(崩溃)转距break down torque堵转locked rotor保持力距holding torque共振resonance电线(电缆)cable测试程序test procedure性能测试performance test耐压测试dielectric test (high pot test)功能测试functionality test, function test实地测试field test寿命测试life test老化试验ageing test连续运转continuous duty, continuous running间歇运转intermittent duty, intermittent running温升试验temperature rise test环境温度ambient temperature峰值peak value供应商supplier, vendor, seller客户customer, client, buyer样品(样机)prototype, sample试生产pilot production, try-out production小批生产pre-series production 批量生产series production打筋spline滚花knurl攻丝tap键槽keyway定位销stop pin螺钉screw螺纹thread螺栓bolt螺母nut联结器(接插件)connector端子:terminal标签, 铭牌label nameplate外形尺寸outside dimension outline精度accuracy公差tolerance不符合要求non-conformity, out of specification前端盖front flange, front end cover, front end bell, front end shield后端盖rear flange, rear end cover, rear end bell rear end shield凸台pilot齿轮,带轮pinion, gear wheel, gear滚珠轴承ball bearing含油轴承sleeve bearing, bronze bearing, self lubricating bearing转子rotor定子stator铁芯core电枢armature磁钢magnet整流子(换向器)commutator碳刷carbon brush, brush刷握brush holder机壳housing/shell轴承室bearing housing出轴shaft extension扁丝flat工装、夹具jigs, fixtures, tooling规gauge引出线lead wire, leads线路板PCB (printed circuit board)驱动器driver, drive冲片lamination 槽slot齿teeth轭yoke硅钢片silicon steel 漆包线copper wire/enamel insulated copper wire胶带tape压铸die casting注塑mould injection波纹垫圈wave washer车加工machining 精车:turning霍尔传感器hall sensor开关switch装配assemble, assembly生产制造make, manufacture, produce动平衡balance. balancing热处理heat treatment表面淬火case hardening穿透淬火through hardening退火annealing正火temper表面涂覆surface coating喷砂sandblast涂胶gluing滴漆varnish电泳powder coating E-coating力矩速度曲线speed torque curve磁通flux工艺流程图process flow chart绝缘骨架plastic bobbin止口rabbet粗糙度roughness同心度concentricity偏心度eccentricity垂直度perpendicularity平行度parallelismabscissa axis 横坐标ac motor 交流电动机active component 有功分量active in respect to 相对呈阻性actual value,effective value 有效值acyclic machine 单极电阻adjustable-speed range 调速范围admittance 导纳air gap 气隙air-gap flux distribution 气隙磁通分布air-gap flux 气隙磁通air-gap line 气隙磁化线air-gap reluctance 气隙磁阻algebraic 代数的algorithmic 算法的alternating current motor交流电动机ampere-turns 安匝(数)Amplitude Modulation (AM) 调幅angle stability功角稳定arc,electric arc 电弧armature circuit 电枢电路armature conductor 电枢导体armature coil 电枢线圈armature m.m.f. wave 电枢磁势波armature reaction 电枢反应armature reaction reactance 电枢反应电抗armature iron 电枢铁心asynchronous motor异步电机asymmetry 不对称automatic V oltage regulator(A VR)自动电压调整器auxiliary motor 辅助电动机axially and circumferentially 轴向和环向axial magnetic attraction 轴向磁拉力bandwidth 带宽base 基极basic frequency component基频分量bast pressure 风压belt factor 分布系数 bilateral circuit 双向电路bimotored 双马达的biphase 双相的breakaway force起步阻力 breakdown torque 极限转矩 bronze 青铜brush 电刷brush voltage drop 电刷压降brush spacing电刷间距capacitance电容carrier 载波cartesian coordinates 笛卡儿坐标系can 屏蔽套cast-aluminum rotor 铸铝转子centrifugal force 离心力characteristic frequency 固有频率chopper circuit 斩波电路circuit branch 支路circuit components 电路元件 circuit diagram 电路图circuit parameters 电路参数circumferential orientation motor 切向永磁电机critical whirling speed 临界转速claw-poles 爪极电机closed loop 闭环closed slot 闭口槽coaxial 共轴的,同轴的cogging torque 齿槽转矩coil winding 线圈绕组coincide in phase with 与….同相collector 集电极commutating pole,inter pole 换向极commutator segment 换向片commutator-brush combination 换向器-电刷总线compensating winding 补偿绕组compensating coil 补偿线圈complex impedance 复数阻抗compound generator 复励发电机compounded 复励conductance 电导conductor 导体converter 变流器copper loss 铜耗correction coefficient 校正系数corridor 通路counter-clock wise 逆时针coupling capacitor 耦合电容current attenuation 电流衰减current density 电流密度current gain 电流增益current phasor 电流相量current strength 电流强度current vector 电流矢量damping cage 阻尼笼dc generator 直流发电机dc motor 直流电动机de machine 直流电机differentiation 微分digital signal processor (DSP) 数字信号处理器direct axis transient time constant 直轴瞬变时间常数direct-axis transient reactance 直轴瞬态电抗direct-axis component of voltage电压直轴分量direct axis 直轴direct-current 直流direct torque control (DTC) 直接转矩控制displacement current 位移电流distributed winding 分布绕组distribution factor 分布因数distorition of voltage waveshape 电压波形畸变domain 磁畴duty,load 负荷dynamic response 动态响应dynamic-state operation 动态运行3D equivalent magnetic circuit network method 三维等效磁路网络法3D-EMCN e.m.f = electromotive fore 电动势eddy current 涡流effective values 有效值effects of saturation 饱和效应electric energy 电能electrical device 电气设备electromagnetic induction 电磁感应electromagnetic power电磁功率 elecironagnetic clamping电磁阻尼electric potential 电位electrical field 电场electromotive force 电动势electromagnetic force 电磁力electromagnetic wave 电磁波electrode 电极电焊条electromagnetic torque 电磁转矩end ring 端环end turn 端部绕组end cover端盖 end ring 端环end leakage reactance端部漏抗equivalent T – circuit T型等值电路excitation system 励磁系统exciting voltage 励磁电压external armature circuit 电枢外电路external characteristic 外特性fan 风扇feedback component 反馈元件feedback loop 反馈回路feedback signal 反馈信号feedback system 反馈系统feedforward signal 前馈信号feedforward system 前馈系统ferromagnetic 铁磁材料field coils 励磁线圈 field current 励磁电流field effect transistor (FET) 场效应管field oriented control (FOC) 磁场定向控制field winding 磁场绕组,励磁绕组flat cable 扁电缆flux linkage 磁链flux line 磁通量flux path 磁通路径flux pulsation 磁通脉冲fluc density 磁通密度flux distribution 磁通分布forward transfer function 正向传递函数fractional pitch短节距frequency 频率frequency conversion 变频frequency changer set变频机组fringing effect边缘效应full load 满载full-load torque 满载转矩full-pitch winding整距绕组fundamental wave基波fundamental component基波分量gain 增益generator voltage发电机电压grade等级harmonic 谐波horsepower (HP) 马力horseshoe magnet 马蹄形磁铁hysteresis loss 磁滞损耗ideal source 理想电源imbricated winding,lap winding叠绕组impedance 阻抗impedance drop 阻抗压降impulse voltage peak value冲击电压峰值inductance电感induction generator 感应发电机induction machine 感应电机induction motor 感应电动机inductive component 感性(无功)分量inherent regulation of generator发电机固有电压调整率instant torgue瞬态转矩instantaneous electric power瞬时电功率instantaneous mechanical power瞬时机械功率insulation 绝缘insulation resistance绝缘电阻intensity of electrial field 电场强度interturn breakdown voltage匝间击穿电压interturn insulating 匝间绝缘interturn voltage resistant test 匝间耐压试验Interior Permanent Magnet (IPM)内置式Surface InsetPermanent Magnet (SIPM)表面式internal resistance 内阻inverter 逆变器iron core铁心iron-loss铁损lamination叠片laminated core 叠片铁心lamination insalation 冲片绝缘lag 滞后leading current超前电流leading power factor 超前功率因数leakage current 漏电流leakage flux 漏磁通leakage reactance 漏磁电抗leakage 泄漏left-hand rule 左手定则lift motor电梯用电动机light emitting diode 发光二极管lightning shielding 避雷line current 线电流line voltage 线电压linear zone 线性区linear-motion machine直线电机linear induction motor直线感应电机line-to-neutral 线与中性点间的load characteristic 负载特性load power factor负载功率因数load-saturation curve 负载饱和曲线locked-rotor torque 锁定转子转矩locked-rotor current堵转电流long pith winding长距绕组long -pith coil长距线圈magnetic amplifier 磁放大器magnetic circuit 磁路magnetic coupling磁耦合magnetic field 磁场magnetic flux磁通magnetic hysteresis(creeping) 磁滞magnetic hysteresis loop 磁滞回线magnetic induction磁感应magnetic loading 磁负荷magnetic particle 磁粉离合器magnetic pole磁极magnetic saturation 磁饱和magnetic torque 电磁转矩magnetic yoke 磁轭magnetizing reacance 磁化电抗magnetization curve 磁化曲线magnetomotive force (m.m.f) 磁动势main pole 主极mesh 网孔mid-frequency band 中频带modulator 调制器modulus 模motoring 电动机驱动motor slip 电动机转差率m.m.f wave 磁势谐波mutual flux 交互(主)磁通mutual-inductor 互感negative phase-sequence 负序no-load 空载nominal pull-in torque 标称牵入转矩non-sinusoidal 非正弦number of poles 极数number of field turns 磁极绕组匝数number of slots 槽数odd-order harmonic 奇次谐波operating point工作点operating characteristic curve 运行特性曲线optical fiber 光纤oscillation 振荡oscilloscope 示波器outside diameter of core 铁心外径overhang leakage permeance 端部漏磁导overload 超负荷overlapping 重叠parallel 并联parallel connexion magnetized winding 并励绕组parallel connexion road number 并联支路数parallel wind number 并绕根数pancake coil 扁平绕组P.D. = potential drop 电压降peak to peak 峰峰值per unit value 标么值percentage 百分数peripheral air-gapleakage磁极漏磁performance characteristic 工作特性permanent magnet永磁体permanent magnet synchronous motor 永磁同步电机permeability 导磁率periodically symmetrical 周期性对称per-unit value 标么值phase displacement 相位差phase-to-phase(line-to-line)voltage相(线)电压phase insulation 相间绝缘phase sequence 相序Phase Modulation (PM) 相位调制phase reversal 反相pilot exciter 副励磁机plugging 反向制动polarity 极性pole-changing motor 变极电动机pole core磁极铁心pole coil 磁极线圈 pole pitch极距pole shoe极靴pole end plate 磁极端板polyphase rectifier 多相整流器polyphase rectifier 多相整流器Polyphase 多相(的)potential transformer 电压互感器power amplifier 功率放大器power frequency 工频propulsion motor 推进电机pure inductance 纯电感pure capacitance 纯电容pure resistance 纯电阻punching冲片pump泵push-through winding 插入绕组quadrature-axis component of voltage电压交轴分量quadrature-axis transient time constant交轴瞬态时间常数quadrature-axis component 交轴分量quadrature-axis transient reactance 交轴瞬态电抗quadrature-axis synchronous reactance交轴同步电抗r.m.s values = root mean square values 均方根值radius 半径radial magnetic attraction force 径向磁拉力radial air gap 径向气隙random-wound 散绕reactance 电抗reactive component 无功分量reactive in respect to 相对….呈感性reactive power 无功功率rectifier 整流器reluctance 磁阻reference V oltage 基准电压reluctance 磁阻residual magnetism 剩磁resistance电阻resistivity 电阻率reactance电抗retarding torque 制动转矩rheostat 变阻器rotating commutator 旋转(整流子)换向器rotating magnetic field 旋转磁场rotor 转子rotor (stator) winding 转子(定子绕组)rotor core 转子铁芯rotor resistance 转子电阻rotor yoke 转子磁轭rotor lamination 转子叠片rotor inter-bar 转子漏阻抗rough adjustment 粗调salient poles 凸极saturation 饱和saturation curve 饱和曲线saturation effect 饱和效应saturation factor 饱和系数self excited 自励self-inductor 自感semi-enclosed mortor 半封闭电动机separately excited 他励的series 串联series excited 串励series-paralled circuit 串并联电路shaft 轴shaft-less 无轴承的short-circuiting ring 短路环short-pitching 短距shunt displacement current 旁路位移电流shunt 并励,分路器shunt excited generator并励发电机shunt field 并励磁场sillicon steel plate 硅钢片simplex wave winding 单波绕组simplexlap winding 单叠绕组single and two-layer winding 单双层绕组single-phasing 单相运行single squirrel cage winding 单鼠笼绕组single-double layer winding 单双层混合绕组sinusoidal – density wave 正弦磁密度sinusoidal time function 正弦时间函数skewed slot 斜槽skin effect 集肤效应skin-friction 表面摩擦系数slip 转差率solid state 固体slot 槽slot permeance 槽磁导slot cross section 槽截面slot pitch 槽距slot opening 槽口slot opening 槽口宽slot width 槽宽slot leakage conductance 槽漏磁导slot leakage inductance槽漏抗slot filling factor 槽满率slot winding 槽绕组slot depth 槽深slotwedge , slot seal 槽楔slot harmonic槽谐波slot model槽形slot leakage flux 槽漏磁speed-torque characteristic 速度转矩特性speed-torque curve 转速力矩特性曲线squirrel cage 鼠笼squirrel cage induction motor 笼形感应电机stabilizer 稳定器stainless steel sleeve 不锈钢轴套stator 定子stator slot 定子槽stator yoke 定子轭stator winding 定子绕组stepping motor 步进电机,步进马达stepper motor 步进电机step-servo-motor 步进伺服电机storage battery 蓄电池surface resistance 表面电阻superconducting generators (SCGs) 超导发电机symmetrical component 对称分量synchronous generator 同步发电机synchronous reactance 同步电抗synchronous reluctance motor (SRM) 同步磁阻电机synchronous speed 同步转速terminal voltage 端电压temperature rise 温升tooth flux density 齿磁通密度total flux linkage 总磁链tooth pitch 齿距tooth root 齿根tooth saturation 齿部饱和tooth shape 齿形tooth tip leakage permeance 齿端漏磁导tooth top 齿顶transformer 变压器transfer function 传递函数transient response 瞬态响应transverse flux motors (TFM) 横向磁通电机induction machine 感应式电机horseshoe magnet 马蹄形磁铁magnetic field 磁场eddy current 涡流right-hand rule 右手定则 left-hand rule 左手定则slip 转差率induction motor 感应电动机rotating magnetic field 旋转磁场 winding 绕组 stator 定子 rotor 转induction machine 感应式电机horseshoe magnet 马蹄形磁铁 magnetic field 磁场 eddy current 涡流 right-hand rule 右手定则left-hand rule 左手定则 slip 转差率 induction motor 感应电动机 rotating magnetic field 旋转磁场winding 绕组 stator 定子 rotor 转子 induced current 感生电流 time-phase 时间相位exciting voltage 励磁电压 solt 槽 lamination 叠片 laminated core 叠片铁芯 short-circuiting ring 短路环squirrel cage 鼠笼 rotor core 转子铁芯 cast-aluminum rotor 铸铝转子 bronze 青铜 horsepower 马力random-wound 散绕 insulation 绝缘 ac motor 交流环电动机 end ring 端环 alloy 合金 coil winding 线圈绕组form-wound 模绕 performance characteristic 工作特性 frequency 频率 revolutions per minute 转/分motoring 电动机驱动 generating 发电 per-unit value 标么值 breakdown torque 极限转矩breakaway force 起步阻力 overhauling 检修 wind-driven generator 风动发电机revolutions per second 转/秒 number of poles 极数 speed-torque curve 转速力矩特性曲线plugging 反向制动 synchronous speed 同步转速 percentage 百分数 locked-rotor torque 锁定转子转矩full-load torque 满载转矩 prime mover 原动机 inrush current 涌流 magnetizing reacance 磁化电抗line-to-neutral 线与中性点间的 staor winding 定子绕组leakage reactance 漏磁电抗no-load 空载 full load 满载 Polyphase 多相(的) iron-loss 铁损 complex impedance 复数阻抗rotor resistance 转子电阻 leakage flux 漏磁通 locked-rotor 锁定转子 chopper circuit 斩波电路separately excited 他励的 compounded 复励 dc motor 直流电动机 de machine 直流电机speed regulation 速度调节 shunt 并励 series 串励 armature circuit 电枢电路 optical fiber 光纤interoffice 局间的 waveguide 波导波导管 bandwidth 带宽 light emitting diode 发光二极管silica 硅石二氧化硅 regeneration 再生, 后反馈放大 coaxial 共轴的,同轴的 high-performance 高性能的carrier 载波 mature 成熟的 Single Side Band(SSB) 单边带 coupling capacitor 结合电容propagate 传导传播 modulator 调制器 demodulator 解调器 line trap 限波器shunt 分路器 Amplitude Modulation(AM 调幅 Frequency Shift Keying(FSK) 移频键控tuner 调谐器 attenuate 衰减 incident 入射的 two-way configuration 二线制generator voltage 发电机电压 dc generator 直流发电机 polyphase rectifier 多相整流器boost 增压 time constant 时间常数 forward transfer function 正向传递函数error signal 误差信号 regulator 调节器 stabilizing transformer 稳定变压器 time delay 延时direct axis transient time constant 直轴瞬变时间常数 transient response 瞬态响应solid state 固体 buck 补偿 operational calculus 算符演算 gain 增益 pole 极点feedback signal 反馈信号 dynamic response 动态响应 voltage control system 电压控制系统mismatch 失配 error detector 误差检测器 excitation system 励磁系统 field current 励磁电流transistor 晶体管 high-gain 高增益 boost-buck 升压去磁 feedback system 反馈系统reactive power 无功功率 feedback loop 反馈回路 automatic Voltage regulator(AVR)自动电压调整器reference Voltage 基准电压 magnetic amplifier 磁放大器 amplidyne 微场扩流发电机self-exciting 自励的 limiter 限幅器 manual control 手动控制 block diagram 方框图 linear zone 线性区potential transformer 电压互感器 stabilization network 稳定网络 stabilizer 稳定器 air-gap flux 气隙磁通saturation effect 饱和效应 saturation curve 饱和曲线 flux linkage 磁链 per unit value 标么值shunt field 并励磁场 magnetic circuit 磁路 load-saturation curve 负载饱和曲线 air-gap line 气隙磁化线polyphase rectifier 多相整流器 circuit components 电路元件 circuit parameters 电路参数electrical device 电气设备 electric energy 电能 primary cell 原生电池 energy converter 电能转换器conductor 导体 heating appliance 电热器 direct-current 直流 time invariant 时不变的self-inductor 自感 mutual-inductor 互感 the dielectric 电介质 storage battery 蓄电池e.m.f = electromotive fore 电动势 unidirectional current 单方向性电流circuit diagram 电路图 load characteristic 负载特性 terminal voltage 端电压external characteristic 外特性 conductance 电导 volt-ampere characteristics 伏安特性carbon-filament lamp 碳丝灯泡 ideal source 理想电源 internal resistance 内阻active (passive) circuit elements 有(无)源电路元件 leakage current 漏电流circuit branch 支路 P.D. = potential drop 电压降 potential distribution 电位分布r.m.s values = root mean square values 均方根值 effective values 有效值steady direct current 恒稳直流电 sinusoidal time function 正弦时间函数 complex number 复数Cartesian coordinates 笛卡儿坐标系 modulus 模 real part 实部 imaginary part 虚部displacement current 位移电流 trigonometric transformations 瞬时值 epoch angle 初相角phase displacement 相位差 signal amplifier 小信号放大器 mid-frequency band 中频带bipolar junction transistor (BJT) 双极性晶体管 field effect transistor (FET) 场效应管electrode 电极电焊条 polarity 极性 gain 增益 isolation 隔离分离绝缘隔振emitter 发射管放射器发射极 collector 集电极 base 基极 self-bias resistor 自偏置电阻triangular symbol 三角符号 phase reversal 反相 infinite voltage gain 无穷大电压增益feedback component 反馈元件 differentiation 微分integration 积分下限 impedance 阻抗fidelity 保真度 summing circuit 总和线路反馈系统中的比较环节 Oscillation 振荡inverse 倒数 admittance 导纳 transformer 变压器 turns ratio 变比匝比 ampere-turns 安匝(数)mutual flux 交互(主)磁通 vector equation 向(相)量方程 power frequency 工频capacitance effect 电容效应 induction machine 感应电机 shunt excited 并励 series excited 串励separately excited 他励 self excited 自励 field winding 磁场绕组励磁绕组speed-torque characteristic 速度转矩特性 dynamic-state operation 动态运行 salient poles 凸极excited by 励磁 field coils 励磁线圈 air-gap flux distribution 气隙磁通分布direct axis 直轴 armature coil 电枢线圈 rotating commutator 旋转(整流子)换向器commutator-brush combination 换向器-电刷总线 mechanical rectifier 机械式整流器armature m.m.f. wave 电枢磁势波 Geometrical position 几何位置 magnetic torque 电磁转矩spatial waveform 空间波形 sinusoidal density wave 正弦磁密度 external armature circuit 电枢外电路instantaneous electric power 瞬时电功率 instantaneous mechanical power 瞬时机械功率effects of saturation 饱和效应 reluctance 磁阻 power amplifier 功率放大器 compound generator 复励发电机rheostat 变阻器 self excitation process 自励过程 commutation condition 换向状况cumulatively compounded motor 积复励电动机 operating condition 运行状态equivalent T circuit T型等值电路 rotor (stator) winding 转子(定子绕组) winding loss 绕组(铜)损耗prime motor 原动机 active component 有功分量 reactive component 无功分量electromagnetic torque 电磁转矩 retarding torque 制动转矩 inductive component 感性(无功)分量abscissa axis 横坐标 induction generator 感应发电机 synchronous generator 同步发电机automatic station 无人值守电站 hydropower station 水电站 process of self excitation 自励过程auxiliary motor 辅助电动机 technical specifications 技术条件 voltage across the terminals 端电压steady state condition 瞬态暂态 reactive in respect to 相对….呈感性active in respect to 相对….呈阻性synchronous condenser 同步进相(调相)机 coincide in phase with 与….同相synchronous reactance 同步电抗 algebraic 代数的 algorithmic 算法的 biphase 双相的bilateral circuit 双向电路 bimotored 双马达的 corridor 通路 shunt displacement current 旁路位移电流leakage 泄漏 lightning shielding 避雷 harmonic 谐波的。
电动机英语作文
电动机英语作文篇一:电动机专业英语inductionmachine感应式电机horseshoemagnet马蹄形磁铁magneticfield磁场eddycurrent涡流right-handrule右手定则left-handrule左手定则slip转差率inductionmotor感应电动机rotatingmagneticfield旋转磁场winding绕组stator定子rotor转子inducedcurrent感生电流time-phase时间相位excitingvoltage励磁电压solt槽lamination叠片laminatedcore叠片铁芯short-circuitingring短路环squirrelcage鼠笼rotorcore转子铁芯cast-aluminumrotor铸铝转子bronze青铜horsepower马力random-wound散绕insulation绝缘acmotor交流环电动机endring端环alloy合金coilwinding线圈绕组form-wound模绕performancecharacteristic工作特性frequency频率revolutionsperminute转/分motoring电动机驱动generating发电per-unitvalue标么值breakdowntorque极限转矩breakawayforce起步阻力overhauling检修wind-drivengenerator风动发电机revolutionspersecond转/秒numberofpoles极数speed-torquecurve转速力矩特性曲线plugging反向制动synchronousspeed同步转速percentage百分数locked-rotortorque锁定转子转矩full-loadtorque满载转矩primemover原动机iushcurrent涌流magnetizingreacance磁化电抗line-to-neutral线与中性点间的staorwinding定子绕组leakagereactance漏磁电抗no-load空载fullload满载Polyphase多相(的)iron-loss铁损compleximpedance复数阻抗rotorresistance转子电阻leakageflux漏磁通locked-rotor锁定转子choppercircuit斩波电路separatelyexcited他励的compounded复励dcmotor直流电动机demachine直流电机speedregulation速度调节shunt并励series串励armaturecircuit电枢电路opticalfiber光纤interoffice局间的waveguide波导波导管bandwidth带宽lightemittingdiode发光二极管silica硅石二氧化硅regeneration再生,后反馈放大coaxial共轴的,同轴的high-performance高性能的carrier载波mature成熟的SingleSideBand(SSB)单边带couplingcapacitor结合电容propagate传导传播modulator调制器demodulator解调器linetrap限波器shunt分路器amplitudemodulation(am调幅FrequencyShiftKeying(FSK)移频键控tuner调谐器attenuate衰减incident入射的two-wayconfiguration二线制generatorvoltage发电机电压dcgenerator直流发电机polyphaserectifier多相整流器boost增压timeconstant时间常数forwardtransferfunction正向传递函数errorsignal误差信号regulator调节器stabilizingtransformer稳定变压器timedelay延时directaxistransienttimeconstant直轴瞬变时间常数transientresponse瞬态响应solidstate固体buck补偿转子:转轴:shaft换向器:commutator铁芯:rotorsteelcore端板:endspider 绝缘纸:rotorsteelliner槽楔(环):wedgeringU型挡圈:Utyperetainer 漆包线:fieldmagnetwire轴承:bearing绝缘漆:varnish换向片:commutatorsegment定子:铁芯:rotorsteelcore漆包线:fieldmagnetwire绝缘纸:rotorsteelliner 支架:bracket支撑组件:机壳:housing端盖:supportframe碳刷组件:碳刷:brush碳刷套:brushsleeve碳刷架(刷握):brushholder弹簧:brushspring刷辫:brushflexible刷盒:brushbox篇二:电机行业英语电机(马达)electricmotor,微电机micromotor小电机smallmotor分马力电机fractionalhorsepowermotor空调暧通电机HVacmotor(heating,ventilatingair-conditioningmotor)直流电机directcurrentmotor,dcmotor串励直流电机serieswounddcmotor并励直流电机shuntwounddcmotor复励直流电机compoundwounddcmotor直流无刷电机Brushlessdirectcurrentmotor,BLdcmotor串激电机universalmotor交流电机alternatingcurrentmotor,acmotor齿轮电机Gearedmotor,Gearmotor同步电机synchronousmotor异步电机asynchronousmotor,inductionmotor罩极电机shadedpolemotor步进电机stepmotor,steppermotor,steppingmotor混合式hybrid磁阻式variablereluctance永磁式permanentmagnet步距角精度stepangleaccuracy转轴shaft轴向负载axialload轴向窜动axialendplay径向跳动radialrunout负载onload 过载overload额定负载ratedload空载no-load电流current电压voltage 防护等级protectionclass,degreeofprotection,isolationclass绝缘等级insulationclass力距torque起动力距startingtorque最大(崩溃)转距breakdowntorque堵转lockedrotor保持力距holdingtorque共振resonance电线(电缆)cable测试程序testproc(转载于: 爱作文网)edure性能测试performancetest耐压测试dielectrictest(highpottest)功能测试functionalitytest,functiontest实地测试fieldtest寿命测试lifetest老化试验ageingtest连续运转continuousduty,continuousrunning间歇运转intermittentduty,intermittentrunning温升试验temperaturerisetest环境温度ambienttemperature峰值peakvalue供应商supplier,vendor,seller客户customer,client,buyer样品(样机)prototype,sample试生产pilotproduction,try-outproduction小批生产pre-seriesproduction批量生产seriesproduction打筋spline滚花knurl攻丝tap键槽keyway定位销stoppin螺钉screw 螺纹thread螺栓bolt螺母nut联结器(接插件)connector端子:terminal标签,铭牌labelnameplate 外形尺寸outsidedimensionoutline精度accuracy公差tolerance不符合要求non-conformity,outofspecification前端盖frontflange,frontendcover,frontendbell,frontendshield后端盖rearflange,rearendcover,rearendbellrearendshield凸台pilot齿轮,带轮pinion,gearwheel,gear滚珠轴承ballbearing含油轴承sleevebearing,bronzebearing,selflubricatingbearing转子rotor定子stator铁芯core电枢armature磁钢magnet整流子(换向器)commutator碳刷carbonbrush,brush刷握brushholder机壳housing/shell轴承室bearinghousing出轴shaftextension扁丝flat工装、夹具jigs,fixtures,tooling规gauge 引出线leadwire,leads线路板PcB(printedcircuitboard)驱动器driver,drive冲片lamination槽slot齿teeth轭yoke硅钢片siliconsteel漆包线copperwire/enamelinsulatedcopperwire胶带tape压铸diecasting注塑mouldinjection波纹垫圈wavewasher车加工machining精车:turning霍尔传感器hallsensor开关switch装配assemble,assembly生产制造make,manufacture,produce动平衡balance.balancing热处理heattreatment表面淬火casehardening穿透淬火throughhardening退火annealing正火temper表面涂覆surfacecoating 喷砂sandblast涂胶gluing滴漆varnish电泳powdercoatingE-coating 力矩速度曲线speedtorquecurve磁通flux工艺流程图processflowchart 绝缘骨架plasticbobbin止口rabbet粗糙度roughness同心度concentricity偏心度eccentricity垂直度perpendicularity平行度parallelismabscissaaxis横坐标acmotor交流电动机activecomponent有功分量activeinrespectto相对呈阻性actualvalue,effectivevalue有效值acyclicmachine单极电阻adjustable-speedrange调速范围admittance导纳airgap气隙air-gapfluxdistribution气隙磁通分布air-gapflux气隙磁通air-gapline气隙磁化线air-gapreluctance气隙磁阻algebraic代数的algorithmic算法的alternatingcurrentmotor交流电动机ampere-turns安匝(数)amplitudemodulation(am)调幅anglestability功角稳定arc,electricarc电弧armaturecircuit电枢电路armatureconductor电枢导体armaturecoil电枢线圈armaturem.m.f.wave 电枢磁势波armaturereaction电枢反应armaturereactionreactance电枢反应电抗armatureiron电枢铁心asynchronousmotor异步电机asymmetry不对称automaticV oltageregulator(aVR)自动电压调整器auxiliarymotor辅助电动机axiallyandcircumferentially轴向和环向axialmagneticattraction轴向磁拉力bandwidth带宽base基极basicfrequencycomponent基频分量bastpressure风压beltfactor分布系数bilateralcircuit双向电路bimotored 双马达的biphase双相的breakawayforce起步阻力breakdowntorque极限转矩bronze青铜brush电刷brushvoltagedrop电刷压降brushspacing电刷间距capacitance电容carrier载波cartesiancoordinates笛卡儿坐标系can屏蔽套cast-aluminumrotor铸铝转子centrifugalforce离心力characteristicfrequency固有频率choppercircuit斩波电路circuitbranch 支路circuitcomponents电路元件circuitdiagram电路图circuitparameters电路参数circumferentialorientationmotor切向永磁电机criticalwhirlingspeed临界转速claw-poles爪极电机closedloop闭环closedslot闭口槽coaxial共轴的,同轴的coggingtorque齿槽转矩coilwinding线圈绕组coincideinphasewith与….同相collector集电极commutatingpole,interpole换向极commutatorsegment换向片commutator-brushcombination换向器-电刷总线compensatingwinding 补偿绕组compensatingcoil补偿线圈compleximpedance复数阻抗compoundgenerator复励发电机compounded复励conductance电导conductor导体converter变流器copperloss铜耗correctioncoefficient 校正系数corridor通路counter-clockwise逆时针couplingcapacitor耦合电容currentattenuation电流衰减currentdensity电流密度currentgain 电流增益currentphasor电流相量currentstrength电流强度currentvector电流矢量dampingcage阻尼笼dcgenerator直流发电机dcmotor直流电动机demachine直流电机differentiation微分digitalsignalprocessor(dSP)数字信号处理器directaxistransienttimeconstant直轴瞬变时间常数direct-axistransientreactance直轴瞬态电抗direct-axiscomponentofvoltage电压直轴分量directaxis直轴direct-current直流directtorquecontrol(dTc)直接转矩控制displacementcurrent位移电流distributedwinding分布绕组distributionfactor分布因数distoritionofvoltagewaveshape电压波形畸变domain磁畴duty,load负荷dynamicresponse动态响应dynamic-stateoperation动态运行3dequivalentmagneticcircuitnetworkmethod三维等效磁路网络法3d-Emcne.m.f=electromotivefore电动势eddycurrent涡流effectivevalues有效值effectsofsaturation饱和效应electricenergy电能electricaldevice电气设备electromagneticinduction电磁感应electromagneticpower电磁功率elecironagneticclamping电磁阻尼electricpotential电位electricalfield电场electromotiveforce电动势electromagneticforce电磁力electromagneticwave电磁波electrode电极电焊条electromagnetictorque 电磁转矩endring端环endturn端部绕组endcover端盖endring端环endleakagereactance端部漏抗equivalentT–circuitT型等值电路excitationsystem励磁系统excitingvoltage励磁电压externalarmaturecircuit电枢外电路externalcharacteristic外特性fan风扇feedbackcomponent反馈元件feedbackloop反馈回路feedbacksignal反馈信号feedbacksystem反馈系统feedforwardsignal前馈信号feedforwardsystem前馈系统ferromagnetic铁磁材料fieldcoils励磁线圈fieldcurrent励磁电流fieldeffecttransistor(FET)场效应管fieldorientedcontrol(Foc)磁场定向控制fieldwinding磁场绕组,励磁绕组flatcable扁电缆fluxlinkage磁链fluxline磁通量fluxpath磁通路径fluxpulsation磁通脉冲flucdensity磁通密度fluxdistribution磁通分布forwardtransferfunction 正向传递函数fractionalpitch短节距frequency频率frequencyconversion变频frequencychangerset变频机组fringingeffect边缘效应fullload满载full-loadtorque满载转矩full-pitchwinding整距绕组fundamentalwave基波fundamentalcomponent基波分量gain增益generatorvoltage发电机电压grade等级harmonic谐波horsepower(HP)马力horseshoemagnet马蹄形磁铁hysteresisloss磁滞损耗idealsource理想电源imbricatedwinding,lapwinding叠绕组impedance阻抗impedancedrop阻抗压降impulsevoltagepeakvalue冲击电压峰值inductance电感inductiongenerator感应发电机inductionmachine感应电机inductionmotor感应电动机inductivecomponent感性(无功)分量inherentregulationofgenerator发电机固有电压调整率instanttorgue瞬态转矩instantaneouselectricpower瞬时电功率instantaneousmechanicalpower瞬时机械功率insulation绝缘insulationresistance绝缘电阻intensityofelectrialfield电场强度interturnbreakdownvoltage匝间击穿电压interturninsulating匝间绝缘interturnvoltageresistanttest匝间耐压试验interiorPermanentmagnet(iPm)内置式SurfaceinsetPermanentmagnet(SiPm)表面式internalresistance内阻inverter逆变器ironcore铁心iron-loss铁损lamination叠片laminatedcore叠片铁心laminationinsalation冲片绝缘lag滞后leadingcurrent超前电流leadingpowerfactor超前功率因数leakagecurrent漏电流leakageflux漏磁通leakagereactance漏磁电抗leakage泄漏left-handrule左手定则liftmotor电梯用电动机lightemittingdiode发光二极管lightningshielding避雷linecurrent线电流linevoltage线电压linearzone 线性区linear-motionmachine直线电机linearinductionmotor直线感应电机line-to-neutral线与中性点间的loadcharacteristic负载特性loadpowerfactor负载功率因数load-saturationcurve负载饱和曲线locked-rotortorque锁定转子转矩locked-rotorcurrent堵转电流longpithwinding长距绕组long-pithcoil长距线圈magneticamplifier磁放大器magneticcircuit磁路magneticcoupling磁耦合magneticfield磁场magneticflux磁通magnetichysteresis(creeping)磁滞magnetichysteresisloop磁滞回线magneticinduction磁感应magneticloading磁负荷magneticparticle磁粉离合器magneticpole磁极magneticsaturation磁饱和magnetictorque电磁转矩magneticyoke磁轭magnetizingreacance磁化电抗magnetizationcurve磁化曲线magnetomotiveforce(m.m.f)磁动势mainpole主极mesh网孔mid-frequencyband中频带modulator调制器modulus模motoring电动机驱动motorslip电动机转差率m.m.fwave 磁势谐波mutualflux交互(主)磁通mutual-inductor互感negativephase-sequence 负序no-load空载nominalpull-intorque标称牵入转矩non-sinusoidal非正弦numberofpoles极数numberoffieldturns磁极绕组匝数numberofslots槽数odd-orderharmonic 奇次谐波operatingpoint工作点operatingcharacteristiccurve运行特性曲线opticalfiber光纤oscillation振荡oscilloscope示波器outsidediameterofcore铁心外径overhangleakagepermeance端部漏磁导overload超负荷overlapping重叠parallel并联parallelconnexionmagnetizedwinding并励绕组parallelconnexionroadnumber并联支路数parallelwindnumber并绕根数pancakecoil扁平绕组P.d.=potentialdrop电压降peaktopeak峰峰值perunitvalue标么值percentage百分数peripheralair-gapleakage磁极漏磁performancecharacteristic工作特性permanentmagnet永磁体permanentmagnetsynchronousmotor永磁同步电机permeability导磁率periodicallysymmetrical周期性对称per-unitvalue标么值phasedisplacement相位差phase-to-phase(line-to-line)voltage相(线)电压phaseinsulation相间绝缘phasesequence相序Phasemodulation(Pm)相位调制phasereversal反相pilotexciter副励磁机plugging反向制动polarity极性pole-changingmotor变极电动机polecore磁极铁心polecoil磁极线圈polepitch极距poleshoe极靴poleendplate磁极端板polyphaserectifier多相整流器polyphaserectifier 多相整流器Polyphase多相(的)potentialtransformer电压互感器poweramplifier功率放大器powerfrequency工频propulsionmotor推进电机pureinductance纯电感purecapacitance纯电容pureresistance纯电阻punching冲片pump泵push-throughwinding插入绕组quadrature-axiscomponentofvoltage电压交轴分量quadrature-axistransienttimeconstant交轴瞬态时间常数quadrature-axiscomponent交轴分量quadrature-axistransientreactance交轴瞬态电抗quadrature-axissynchronousreactance交轴同步电抗r.m.svalues=rootmeansquarevalues均方根值radius半径radialmagneticattractionforce径向磁拉力radialairgap径向气隙random-wound散绕reactance电抗reactivecomponent无功分量reactiveinrespectto相对….呈感性reactivepower无功功率rectifier整流器reluctance磁阻referenceV oltage基准电压reluctance磁阻residualmagnetism剩磁resistance电阻resistivity电阻率reactance电抗retardingtorque制动转矩rheostat变阻器rotatingcommutator旋转(整流子)换向器rotatingmagneticfield旋转磁场rotor转子rotor(stator)winding转子(定子绕组)rotorcore转子铁芯rotorresistance转子电阻rotoryoke转子磁轭rotorlamination转子叠片rotorinter-bar转子漏阻抗roughadjustment粗调salientpoles凸极saturation饱和saturationcurve 饱和曲线saturationeffect饱和效应saturationfactor饱和系数selfexcited自励self-inductor自感semi-enclosedmortor半封闭电动机separatelyexcited他励的series串联seriesexcited串励series-paralledcircuit串并联电路shaft轴shaft-less无轴承的short-circuitingring短路环short-pitching短距shuntdisplacementcurrent旁路位移电流shunt并励,分路器shuntexcitedgenerator并励发电机shuntfield并励磁场silliconsteelplate 硅钢片simplexwavewinding单波绕组simplexlapwinding单叠绕组singleandtwo-layerwinding单双层绕组single-phasing单相运行singlesquirrelcagewinding单鼠笼绕组single-doublelayerwinding单双层混合绕组sinusoidal–densitywave正弦磁密度sinusoidaltimefunction正弦时间函数skewedslot斜槽skineffect集肤效应skin-friction表面摩擦系数slip转差率solidstate固体slot槽slotpermeance槽磁导slotcrosssection槽截面slotpitch槽距slotopening 槽口slotopening槽口宽slotwidth槽宽slotleakageconductance槽漏磁导slotleakageinductance 槽漏抗slotfillingfactor槽满率slotwinding槽绕组slotdepth槽深slotwedge,slotseal槽楔slotharmonic 槽谐波slotmodel槽形slotleakageflux槽漏磁speed-torquecharacteristic速度转矩特性speed-torquecurve转速力矩特性曲线squirrelcage鼠笼squirrelcageinductionmotor笼形感应电机stabilizer稳定器stainlesssteelsleeve不锈钢轴套stator定子statorslot定子槽statoryoke定子轭statorwinding定子绕组steppingmotor步进电机,步进马达steppermotor步进电机step-servo-motor步进伺服电机storagebattery蓄电池surfaceresistance表面电阻superconductinggenerators(ScGs)超导发电机symmetricalcomponent对称分量synchronousgenerator同步发电机synchronousreactance同步电抗synchronousreluctancemotor(SRm)同步磁阻电机synchronousspeed同步转速terminalvoltage端电压temperaturerise温升toothfluxdensity齿磁通密度totalfluxlinkage总磁链toothpitch齿距toothroot齿根toothsaturation齿部饱和toothshape齿形toothtipleakagepermeance齿端漏磁导toothtop齿顶transformer变压器transferfunction传递函数transientresponse瞬态响应transversefluxmotors(TFm)横向磁通电机inductionmachine感应式电机horseshoemagnet马蹄形磁铁magneticfield磁场eddycurrent涡流right-handrule右手定则left-handrule左手定则slip转差率inductionmotor感应电动机rotatingmagneticfield旋转磁场winding绕组stator定子rotor转inductionmachine感应式电机horseshoemagnet马蹄形磁铁magneticfield磁场eddycurrent涡流right-handrule右手定则left-handrule左手定则slip转差率inductionmotor感应电动机rotatingmagneticfield旋转磁场winding绕组stator定子rotor转子inducedcurrent感生电流time-phase时间相位excitingvoltage励磁电压solt槽lamination叠片laminatedcore叠片铁芯short-circuitingring短路环squirrelcage鼠笼rotorcore转子铁芯cast-aluminumrotor铸铝转子bronze青铜horsepower马力random-wound散绕insulation绝缘acmotor交流环电动机endring端环alloy合金coilwinding线圈绕组form-wound模绕performancecharacteristic工作特性frequency频率revolutionsperminute 转/分motoring电动机驱动generating发电per-unitvalue标么值breakdowntorque极限转矩breakawayforce起步阻力overhauling检修wind-drivengenerator风动发电机revolutionspersecond转/秒numberofpoles极数speed-torquecurve转速力矩特性曲线plugging反向制动synchronousspeed同步转速percentage百分数locked-rotortorque锁定转子转矩full-loadtorque满载转矩primemover 原动机iushcurrent涌流magnetizingreacance磁化电抗line-to-neutral 线与中性点间的staorwinding定子绕组leakagereactance漏磁电抗no-load空载fullload满载Polyphase多相(的)iron-loss铁损compleximpedance复数阻抗rotorresistance转子电阻leakageflux漏磁通locked-rotor锁定转子choppercircuit斩波电路separatelyexcited他励的compounded复励dcmotor直流电动机demachine直流电机speedregulation速度调节shunt并励series串励armaturecircuit电枢电路opticalfiber光纤interoffice局间的waveguide波导波导管bandwidth 带宽lightemittingdiode发光二极管silica硅石二氧化硅regeneration再生,后反馈放大coaxial共轴的,同轴的high-performance高性能的carrier载波mature成熟的SingleSideBand(SSB)单边带couplingcapacitor结合电容propagate传导传播modulator调制器demodulator解调器linetrap限波器shunt分路器amplitudemodulation(am调幅FrequencyShiftKeying(FSK)移频键控tuner调谐器attenuate衰减incident入射的two-wayconfiguration二线制generatorvoltage发电机电压dcgenerator直流发电机polyphaserectifier 多相整流器boost增压timeconstant时间常数forwardtransferfunction正向传递函数errorsignal误差信号regulator调节器stabilizingtransformer稳定变压器timedelay延时directaxistransienttimeconstant直轴瞬变时间常数transientresponse瞬态响应solidstate固体buck补偿operationalcalculus算符演算gain增益pole 极点feedbacksignal反馈信号dynamicresponse动态响应voltagecontrolsystem电压控制系统mismatch失配errordetector误差检测器excitationsystem励磁系统fieldcurrent励磁电流transistor晶体管high-gain高增益boost-buck升压去磁feedbacksystem 反馈系统reactivepower无功功率feedbackloop反馈回路automaticV oltageregulator(aVR)自动电压调整器referenceV oltage基准电压magneticamplifier磁放大器amplidyne微场扩流发电机self-exciting自励的limiter限幅器manualcontrol手动控制blockdiagram方框图linearzone线性区potentialtransformer电压互感器stabilizationnetwork稳定网络stabilizer稳定器air-gapflux气隙磁通saturationeffect饱和效应saturationcurve饱和曲线fluxlinkage磁链perunitvalue标么值shuntfield并励磁场magneticcircuit磁路load-saturationcurve负载饱和曲线air-gapline气隙磁化线polyphaserectifier多相整流器circuitcomponents电路元件circuitparameters电路参数electricaldevice电气设备electricenergy电能primarycell原生电池energyconverter电能转换器conductor导体heatingappliance电热器direct-current直流timeinvariant时不变的self-inductor自感mutual-inductor互感thedielectric电介质storagebattery蓄电池e.m.f=electromotivefore电动势unidirectionalcurrent单方向性电流circuitdiagram电路图loadcharacteristic负载特性terminalvoltage端电压externalcharacteristic外特性conductance电导volt-amperecharacteristics 伏安特性篇三:电动机介绍我们这里所说的电动机,一般都是指能为车辆行驶提供全部或部分动力来源的电动机。
电磁助推翼段加速地面效应及稳定性分析
第9卷㊀第1期2024年1月气体物理PHYSICSOFGASESVol.9㊀No.1Jan.2024㊀㊀DOI:10.19527/j.cnki.2096 ̄1642.1081电磁助推翼段加速地面效应及稳定性分析罗星东ꎬ㊀侯自豪ꎬ㊀李少伟ꎬ㊀薄靖龙ꎬ㊀翟茂春(中国航天科工飞航技术研究院磁电总体部ꎬ北京100074)GroundEffectsandStabilityAnalysisofAirfoilAcceleratedbyElectromagneticPropulsionLUOXingdongꎬ㊀HOUZihaoꎬ㊀LIShaoweiꎬ㊀BOJinglongꎬ㊀ZHAIMaochun(InstituteofMagneticLevitationandElectromagneticPropulsionꎬHIWINGTechnologyAcademyofCASICꎬBeijing100074ꎬChina)摘㊀要:电磁发射空天飞行器是未来可重复使用天地往返运输系统的重要发展方向之一ꎬ近地助推加速过程受电磁悬浮力影响ꎬ面临着复杂的地面效应与弹性稳定性问题ꎮ以NACA0012二维翼段为研究对象ꎬ建立了电磁力与气动力耦合的动力学模型ꎬ对翼段近地Ma=0~1.5加速过程中的流场特征㊁运行姿态和气动特性进行了数值模拟ꎮ结果表明ꎬ翼段加速诱导地面效应可分为4阶段ꎮ第1阶段ꎬ上下翼面为亚声速流动ꎬ翼段姿态和气动载荷基本无振荡ꎮ第2阶段ꎬ上翼面开始出现跨声速流动ꎬ下翼面流动以典型的变截面跨声速流动为主导ꎬ并伴随壅塞-通流模态转换ꎮ第3阶段ꎬ上翼面保持跨声速流动ꎬ下翼面流动壅塞再现ꎬ并呈现出完全膨胀的跨声速壅塞流动状态ꎮ在第2㊁3阶段ꎬ翼段姿态和气动载荷低频大幅振荡ꎮ第4阶段ꎬ上翼面发展为超声速流动ꎬ下翼面保持完全膨胀壅塞流动ꎬ翼段姿态和气动载荷高频小幅振荡ꎮ在此基础上ꎬ探究了悬浮高度㊁悬浮刚度㊁磁体间距对系统稳定性的影响ꎮ发现增加悬浮高度ꎬ有利于在一定程度上提高系统稳定性ꎻ适当增加悬浮刚度或悬浮磁体间距ꎬ同时限定电磁助推目标速度小于系统振荡发散临界Mach数ꎬ有利于明显提高系统稳定性ꎮ关键词:电磁发射ꎻ地面效应ꎻ弹性系统ꎻ壅塞流动ꎻ稳定性㊀㊀㊀中图分类号:V211.5㊀㊀文献标志码:A收稿日期:2023 ̄08 ̄31ꎻ修回日期:2023 ̄10 ̄09基金项目:国家自然科学基金(12072014)第一作者简介:罗星东(1993 )㊀男ꎬ硕士ꎬ主要研究电磁发射地面效应㊁飞行器内外流ꎮE ̄mail:star_east@outlook.comAbstract:Aerospacevehiclelaunchedbyelectromagneticpropulsionisapotentialoptionforfuturereusablespacetranspor ̄tationsystems.Complexgroundeffectsandstabilityissuesareinducedgenerallyduetotheintroductionofelectromagneticlevitationforce.Adynamicmodelcoupledwithelectromagneticforceandaerodynamicforcewasestablishedforthetwo ̄di ̄mensionalwing(NACA0012).NumericalsimulationswereconductedontheflowcharacteristicsꎬoperationalattitudeꎬandaerodynamiccharacteristicsofthewingduringtheMa=0~1.5accelerationprocess.Itindicatesthatgroundeffectscanbedividedintofourstages.Inthefirststageꎬsubsonicflowsarepresentedonboththeupperandlowerwingsurfacesꎬandthereisbasicallynooscillationfortheattitudeandaerodynamicloadsofthewing.Inthesecondstageꎬtransonicflowemer ̄gesontheupperwingsurfaceꎬwhiletheflowonthelowerwingsurfaceisdominatedbyatypicalvariablecross ̄sectiontransonicflowaccompaniedbythetransitionfromthechokedflowmodetotheunchokedone.Inthethirdstageꎬtheupperwingsurfacemaintainstransonicflowsꎬwhilethelowerwingsurfaceundergoeschokedflowswhicharefullyexpanded.Inboththesecondandthirdstagesꎬthewingattitudeandaerodynamicloadsoscillatesignificantlyatlowfrequencies.Inthefourthstageꎬtheupperwingsurfaceundergoessupersonicflowsꎬwhilethelowerwingsurfacemaintainschokedflows.Thewingattitudeandaerodynamicloadsoscillateslightlyathighfrequencies.Onthisbasisꎬtheeffectsofsuspensionheightꎬsuspensionstiffnessandspacingbetweensuspensionmagnetsonthesystemstabilitywereexplored.Itisfoundthatincrea ̄singthesuspensionheightisbeneficialforimprovingsystemstability.Increasingthesuspensionstiffnessorspacingbetweensuspensionmagnetsappropriatelyꎬwhilelimitingthetargetspeedofelectromagneticpropulsiontobelessthanthecritical气体物理2024年㊀第9卷Machnumberofsystemoscillationdivergenceꎬisbeneficialforsignificantlyimprovingsystemstability.Keywords:electromagneticlaunchꎻgroundeffectꎻelasticsystemꎻchokedflowꎻstability引㊀言新一代空天飞行器采用组合循环动力技术ꎬ可水平起降与重复使用ꎬ并可自由穿梭于低空㊁临近空间乃至近地轨道ꎬ是未来争夺太空经济和军事主动权的重要途径ꎮ由于飞行过程须跨越亚㊁跨㊁超㊁高超声速ꎬ所以需要兼顾飞行器在宽速域㊁大空域下的气动布局和组合动力效率等问题ꎬ这对系统设计提出了极大挑战[1]ꎮ涡波效应-乘波设计㊁机翼-乘波设计和变形/组合设计是目前发展宽速域飞行器的几种主要思路[2]ꎮ近年来ꎬ电磁发射技术逐渐成熟ꎬ为克服上述难题提供了另一种颇具潜力的解决方案[3]ꎮ利用电磁橇将飞行器在近地助推至超声速ꎬ能够有效规避低速起飞阶段ꎬ增加系统设计冗余度ꎮ国内外已对此开展了电磁助推发射方案验证和缩比模型试验验证[4]ꎮ不同于开域飞行ꎬ地面为近地流动营造了独特的半开放约束空间ꎬ通常诱发以复杂激波现象为主导的跨/超声速地面效应干扰ꎮ除空气动力学特性外ꎬ飞行器还处于电磁弹性力-气动力-结构弹性力多物理场耦合环境中ꎬ面临着复杂的气动弹性及稳定性问题ꎮ深入认知电磁助推加速地面效应并探索调控系统稳定性的手段是电磁发射技术开发的重要前提ꎮ依托地效飞行器[5ꎬ6]㊁航天器着陆[7ꎬ8]等研究背景ꎬ研究人员对低亚声速地面效应已建立起较丰富的认识[9 ̄11]ꎮMorrow等[12]通过研究发现ꎬ与低亚声速地面效应不同ꎬ跨/超声速地面效应更为复杂ꎬ以激波及其反射现象为主要特征ꎮ罗世彬等[13]综述了电磁助推发射的气动关键技术ꎬ认为飞行器-电磁橇在加速至超声速过程中ꎬ多体之间强烈的激波干扰会影响滑跑稳定性ꎮ研究人员对跨/超声速地面效应开展了必要讨论ꎮ在实验研究方面ꎬDoig等[14 ̄16]㊁Barber等[17]㊁Kleine等[18]㊁Sheridan等[19]采用镜像模型法ꎬ巧妙地消除了风洞中静止地面边界层的影响ꎬ对尖劈和子弹等简化构型在不同离地高度㊁来流速度下的超声速近地流场进行了实验ꎮ研究发现ꎬ当离地高度较小时ꎬ飞行器前缘上部呈现为脱体弓形激波ꎬ而下部因局部地面效应呈现为驻定正激波ꎮ除风洞实验外ꎬPurdon等[20]通过对比实弹射击和风洞实验结果ꎬ研究了静止地面对子弹超声速近地流场的影响ꎮ在数值模拟研究方面ꎬOliviu等[21]研究了圆柱体近地流动中的激波反射和尾涡结构ꎮGao等[22]研究了跨声速地面效应下激波-边界层干扰导致的压力脉动和抖振现象ꎮ陈晓东等[23]研究了磁悬浮助推发射装置的气动特性并进行了风洞缩比实验ꎮ肖虹等[24]计算了Ma=0.1~2.0范围内某钝头体火箭橇实验中的地面效应干扰ꎮ王伟等[25]针对细长体开展了Ma=2.5下不同攻角以及不同离地高度的地面效应研究ꎮYu等[26]进一步研究了乘波体构型在复杂地面构型下的地面效应流场和气动特性ꎮ与上述静态地面效应不同ꎬ助推加速引起的非定常地面效应更为复杂多变[27]ꎬ常伴随流场结构非定常转变和气动载荷非线性时变ꎬ并出现双解问题和迟滞现象[28 ̄30]ꎮ针对非定常地面效应流动机理的研究尚处于起步阶段ꎬ仍待深入研究ꎮ气动弹性及稳定性问题在电磁发射中同样不可忽略ꎮ已有研究主要关注气动力-结构弹性力构成的经典弹性系统ꎮ例如ꎬNuhait等[31]㊁Dessi等[32]研究了二维翼型在地面效应下的颤振特性ꎬ结果表明地面效应具有使翼型失稳的作用ꎮ张斌等[33]通过涡诱导的圆柱自由振荡算例和二维颤振标模ꎬ研究了地面效应对气动弹性动态响应和颤振边界的影响ꎮ此外ꎬ电磁弹性力的引入将使得气动弹性问题更加突出㊁独特和复杂ꎮ为突出重点和分解难点ꎬ本文基于逐步解耦的思路ꎬ选取NACA0012典型二维翼段作为研究对象ꎬ对电磁弹性力-气动力耦合作用下的翼段加速地面效应进行研究ꎬ重点关注翼段加速过程中的流场㊁姿态和气动载荷的演变规律ꎬ同时考察弹性系统参数对电磁助推稳定性的影响ꎮ1㊀气动-电磁耦合模型和数值计算方法1.1㊀物理模型和控制方程图1为考察的二维NACA0012翼段示意图ꎮ坐标系原点O与翼段质心初始位置重合ꎬX轴沿水平方向ꎬ与电磁推进方向相反ꎻY轴沿铅垂方向ꎬ竖直向上ꎻZ轴由右手法则确定ꎮ翼段上下型线对称ꎬ弦长l为1.0mꎬ质心距离翼前缘0.4mꎬ俯仰角为体轴与X轴夹角ꎬ规定抬头为正ꎬ简记为θꎬ初始时刻θ=θ0ꎮ单位展长翼段质量为82.0kgꎬ转64第1期罗星东ꎬ等:电磁助推翼段加速地面效应及稳定性分析动惯量I为11.4kg m2ꎮ电磁悬浮系统的地面模组内置于地面ꎬ翼段通过预先布置于AꎬB两处的磁体与地面模组感应产生电磁悬浮力ꎬ从而悬浮于平面轨道上ꎮ质心离地悬浮高度为hꎬ初始时刻h=0.5mꎮ电磁悬浮力与悬浮高度相关ꎮ悬浮力可简化为位于翼段上AꎬB两点的 弹簧振子 ꎮ弹簧刚度k0与电磁悬浮刚度一致ꎬ为150kN/mꎮ翼段以加速度a=100m/s2向左匀加速运动ꎬ并保留沿Y向平动和绕Z轴转动ꎮ图1㊀电磁助推NACA0012翼段受力示意图Fig.1㊀SchematicdiagramofforceanalysisoftheNACA0012wingacceleratedbyelectromagneticpropulsion对于存在运动边界(即翼段)的非定常数值模拟ꎬ采用任意Lagrange ̄Euler形式的流动控制方程求解ꎮ在控制体V内ꎬ积分形式的质量守恒㊁动量守恒和能量守恒方程通式为ddtʏVρϕdV+ʏ∂Vρϕ(u-us) dA=ʏ∂VΓ(Ñϕ) dA+ʏVSϕdV(1)式中ꎬρ是气体密度ꎻ∂V代表控制体边界ꎻA是网格面矢量ꎻϕ=(1ꎬuiꎬT)是通用变量ꎬ其中ꎬi=1ꎬ2ꎬ3ꎻu=uj是速度矢量ꎬ其中ꎬj=1ꎬ2ꎬ3ꎻus=(us1ꎬus2ꎬus3)是网格运动速度矢量ꎻΓ=(0ꎬμꎬkT/cp)是广义扩散系数ꎻSϕ=(0ꎬ∂p/∂xi+SiꎬST)是广义源项ꎮ其中ꎬμ是动力黏度ꎬkT是流体传热系数ꎬcp是比热容ꎬp是静压ꎬT是温度ꎬSi是动量方程源项ꎬST是能量方程黏性耗散项ꎮ为封闭上述方程ꎬ引入理想气体状态方程p=ρRTꎬ其中ꎬR是摩尔气体常数ꎮ上述方程中ꎬ位于运动物体表面的us项须通过求解电磁弹性力-气动力耦合的动力学方程组获得ꎮ为建立动力学模型ꎬ以下对电磁弹性力进行建模ꎬ并给出电磁弹性力-气动力耦合受力模型ꎮ对图1中翼段进行简要受力分析ꎮ翼段受气动阻力D和气动升力L作用ꎬ二者对质心产生气动力矩Mair=-OPˑ(L+D)ꎬ其中P点为气动压心ꎮ此外ꎬ电磁悬浮力F1ꎬF2分别对质心产生电磁力矩M1ꎬM2ꎮ规定电磁悬浮力㊁气动力与XꎬY轴正方向一致为正ꎬ电磁力矩和气动力矩抬头为正ꎮ则有F1(t)=-k(yA-yA0)+F1ꎬt=0(2)F2(t)=-k(yB-yB0)+F2ꎬt=0(3)M1(t)=-OAˑF1(4)M2(t)=-OBˑF2(5)式中ꎬ等号第2项F1ꎬt=0和F2ꎬt=0表示求解初始时刻弹簧振子AꎬB具有的Y向初始电磁悬浮力ꎮ因此ꎬ绕翼段质心的刚体动力学二自由度控制方程为my㊆=L+F1+F2-mg(6)Iθ㊆=Mair+M1+M2(7)式中ꎬy㊆是翼段质心垂向加速度ꎬθ㊆㊀是翼段绕质心的俯仰角加速度ꎮ对上述矢量方程进行标量化处理ꎬ则电磁悬浮力F1ꎬF2为F1=-k(yA-yA0)+F1ꎬt=0(8)F2=-k(yB-yB0)+F2ꎬt=0(9)式中ꎬyAꎬyB分别是任意时刻AꎬB点的Y向坐标ꎮ由刚体运动关系ꎬyAꎬyB可由O点平动位移y和相对O点的转动位移给定ꎮ以图1中B点为例χB=arccosOBt=0 (1ꎬ0)OBt=0(10)yB=y-OBsin(χB+Δθ)(11)式中ꎬχB是初始时刻由质心水平单位正矢量顺时针74气体物理2024年㊀第9卷转动至与OB共线时的几何夹角ꎬ值域为[0ꎬp]ꎮDθ是相对于初始时刻的俯仰角变化量ꎮ同理χA=arccosOAt=0 (1ꎬ0)OAt=0(12)yA=y-OAsin(χA+Δθ)(13)进一步地ꎬ将式(8)~(13)代入式(6)㊁(7)可得弹性系统控制方程的标量一般形式my㊆+k[2y-lBsin(χB+Δθ)-lAsin(χA+Δθ)-(yA0+yB0)]=L-mg+(F1ꎬt=0+F2ꎬt=0)(14)Iθ㊆-lAcos(χA+Δθ)ˑ{-k[y-lAsin(χA+Δθ)-yA0]+F1ꎬt=0}+lBcos(χB+Δθ)ˑ{-k[y-lBsin(χB+Δθ)-yB0]+F2ꎬt=0}=Mair(15)式中ꎬlA和lB表示AꎬB弹簧作用点与质心的距离ꎬ即lA=OAꎬlB=OBꎮ本文考察相对理想化的初始状态ꎬ假定磁体AꎬB均位于体轴上ꎬlA=0.4mꎬlB=0.6mꎬ磁体间距l0=lA+lB=1.0mꎬ翼段初始俯仰角θ0=0ꎬ则有yA0=yB0=0ꎬχA=pꎬχB=0ꎬDθ=θꎻ同时假定弹簧初始处于松弛状态ꎬ则F1ꎬt=0=F2ꎬt=0=0ꎮ则式(14)㊁(15)可写为my㊆+k(2y-lBsinθ+lAsinθ)=L-mg(16)Iθ㊆+k2(l2B+l2A)sin2θ+ky(lA-lB)cosθ=Mair(17)对于以上弹性系统ꎬ图2给出了电磁弹性力-气动力-惯性力耦合作用下的翼段近地加速非定常分步求解策略ꎮ图2㊀翼段加速过程非定常求解策略Fig.2㊀Unsteadysolutionstrategyforwingacceleration1.2 网格和计算方法翼段近地加速过程的计算域如图3所示ꎮ计算域的入口及出口均采用压力远场边界条件ꎬ并设置在远离翼段10倍弦长距离以外ꎮ时变来流的Mach数为Ma=0~1.5ꎬ压力为1atm(1atm=1.01325ˑ105Pa)㊁温度为288.15Kꎮ翼段和地面满足黏性无滑移绝热边界条件ꎬ地面速度与来流速度一致ꎮ图3㊀计算域及边界条件Fig.3㊀Computationaldomainandboundaryconditions采用重叠网格法模拟翼段近地加速过程中的沉浮和俯仰运动ꎬ流向网格尺度约5mmꎬ近壁面网格以增长率1.18发展25层ꎬ满足y+~1要求ꎮ图4展示了翼段邻域重叠网格ꎬ计算结果表明重叠交界面附近的网格匹配性较好ꎮ采用Fluent密度基隐式求解器开展非定常数值模拟ꎬ湍流模型采用k ̄ωSST模型ꎬ通量采用Roe ̄FDS格式ꎬ流场采用2阶迎风格式求解ꎬ采用CFL=1.5ꎮ在非定常计算中ꎬ时间迭代步长按照Δts=min(Δx/(u+c)ꎬ2πm/k)给定ꎬ其中Dx是流向网格尺度ꎬu是当地水平流动速度ꎬ本文计算统一取Δts=5ˑ10-5sꎮ图4㊀翼段邻域的重叠网格Fig.4㊀OversetgridsaroundtheNACA0012wing为了考察网格无关性ꎬ对来流Mach数Ma=0.8条件下不同网格尺度下NACA0012翼段定常气动力进行了对比ꎮ其中ꎬ较稀疏网格数为1.4ˑ105(流向网格尺度10mm)ꎬ中等尺度网格数为2.7ˑ105(流向网格尺度5mm)ꎬ较密集网格数为1.12ˑ84第1期罗星东ꎬ等:电磁助推翼段加速地面效应及稳定性分析106(流向网格尺度3mm)ꎮ结果表明ꎬ随着网格数量的增加ꎬ阻力㊁升力和力矩均趋于收敛ꎬ本文选取中等尺度网格开展研究ꎮ1.3㊀计算方法验证在跨/超声速阶段ꎬ激波干扰和激波-边界层干扰是典型的地面效应流动特征ꎮ采用Doig风洞实验结果[11]ꎬ对本文数值方法模拟地效的有效性进行了验证ꎮ实验来流条件为Ma=2.4ꎬRe=3.07´105ꎬα=0ʎꎬ地面效应采用固定壁板方式模拟ꎮ在相同条件下开展了数值模拟ꎬ图5给出了数值纹影和子弹表面压力系数分布ꎮ为了更加直观地对比地面效应波系的位置及形态ꎬ这里将数值纹影与实验纹影对称放置ꎮ可见ꎬ数值与实验结果吻合较好ꎬ对激波捕捉的位置相近ꎮ(a)Schlierenphotograph(b)Surfacepressuredistribution图5㊀超声速子弹地面效应的数值与实验对比ꎬMa=2.4Fig.5㊀ComparisonofgroundeffectsofthesupersonicprojectilebetweennumericalandexperimentalresultsꎬMa=2.4进一步地ꎬ采用AGARD提供的NACA0012跨声速简谐振荡实验[24]对非定常数值方法开展了验证ꎮ翼型的振荡形式如下α(t)=α0+αmsin(ωrt)(18)式中ꎬα0为平均来流攻角ꎬαm为振荡幅值ꎬωr为角频率ꎮ图6给出了NACA0012跨声速简谐振荡抬头上仰α=2.34ʎ时刻的数值与实验压力系数分布对比结果ꎮ数值计算获得的压力分布与实验数据吻合良好ꎬ说明本文数值方法对含运动边界的动态俯仰模拟具有较高精度ꎮ图6㊀攻角α=2.34ʎ姿态时翼段压力系数分布Fig.6㊀Pressurecoefficientdistributiononthewingsurfaceꎬα=2.34ʎ2㊀结果与讨论本节首先对二维NACA0012翼段在相对悬浮高度为h/l=0.5下的典型加速地面效应进行研究ꎬ以厘清近地流场㊁翼段姿态和气动载荷的演变规律ꎬ而后考察翼段悬浮高度㊁悬浮刚度㊁悬浮磁体间距3个关键因素对电磁助推加速稳定性的影响ꎮ2.1㊀翼段加速地面效应及气动力特性翼段近地电磁悬浮推进过程中的典型时刻加速流场变化如图7所示ꎮ为了便于分辨各流场中翼段相对初始位置的沉浮位移和姿态ꎬ在图7中标识O点以显示初始时刻翼段质心位置ꎮ由于弹簧振子在初始时刻处于完全松弛状态ꎬ所以也可由沉浮位移判断电磁悬浮力的方向ꎮ同时ꎬ在图7中标识箭头位置和方向以表示压心位置和升力方向ꎬΔxOP/l为质心指向压心的流向距离与弦长的比值ꎬ正值则表示压心在质心右方ꎮ图7表明ꎬ翼段在加速过程中的流场结构和受力特性复杂多变ꎬ根据速域可大致分为4个阶段ꎮ94气体物理2024年㊀第9卷(a)Ma=0.40㊀(b)Ma=0.50㊀(c)Ma=0.60(d)Ma=0.70㊀(e)Ma=0.76㊀(f)Ma=0.80(g)Ma=0.86㊀(h)Ma=0.90㊀(i)Ma=1.00(j)Ma=1.10㊀(k)Ma=1.30㊀(l)Ma=1.50图7㊀NACA0012翼段近地助推加速典型Mach数下流场压力系数云图Fig.7㊀PressurecoefficientdistributionoftheNACA0012wingatrepresentativeMachnumbers第1阶段ꎬ当Maɤ0.60ꎬ上下翼面呈现亚声速流动ꎮ自由空间内上下翼面流动基本对称ꎬ压心位置近似与质心重合ꎬ翼段姿态相对稳定ꎮ而受地面效应影响ꎬ上下翼面流动逐渐出现差异ꎬ下翼面低压区迅速增大ꎬ出现局部超声速区域(图7(c))ꎬ翼段压心前移(向左移动)并受到负升力ꎬ因此翼段下沉并低头ꎮ第2阶段ꎬ当0.60<Maɤ0.76ꎬ上翼面前缘逐渐向跨声速流动过渡并形成局部超声速低压区域ꎻ而下翼面与地面所构造的约束空间类似收缩-扩张型喷管ꎬ当来流在下翼面建立起声速喉道(图7(d))ꎬ流动产生壅塞并产生一系列压缩波向翼段前方传播ꎮ下翼面流动呈现为典型的变截面跨声速流动:亚声速-声速-超声速ꎬ但流动处于过膨胀状态ꎬ恢复激波S1位于翼段下方ꎮ但在电磁斥力及翼段前缘上方超声速低压持续作用下ꎬ翼段快速抬头并上升ꎬ喷管的收缩比减弱ꎬ下翼面流动伴随壅塞-通流状态快速转换(图7(e))ꎮ因此ꎬ下翼面出现壅塞是第1阶段向第2阶段转变的明显判据ꎮ第3阶段ꎬ当0.76ɤMa<0.90ꎬ上翼面保持跨声速流动特点ꎬ以局部超声速低压膨胀区和其后的恢复激波S2为主要特征ꎬ随着来流速度增加ꎬS2逐渐后退ꎬ尾部斜激波S3形成ꎮ在电磁拉力作用下ꎬ翼段开始下降ꎬ下翼面重新建立起壅塞ꎬ与第2阶段壅塞流动不同的是ꎬ此时激波S1已完全退出下翼面ꎬ流动处于完全膨胀状态ꎮ因此壅塞再现是第2阶段向第3阶段转变的判据ꎮ综合第2和第3阶段来看ꎬ流动的非定常特性和壅塞-通流的交05第1期罗星东ꎬ等:电磁助推翼段加速地面效应及稳定性分析替变换引起了翼段的升力方向㊁压心位置和悬浮姿态显著变化ꎬ对其运行稳定性影响明显ꎮ第4阶段ꎬ当0.90ɤMa<1.50ꎬ上翼面呈现出完全超声速流动ꎬ以此为标志流动开始进入第4阶段ꎻ下翼面持续保持壅塞ꎬ处于完全膨胀状态ꎮ当来流处于超声速速域时ꎬ翼段前方压缩波逐渐汇聚成为激波S4并向翼段靠近ꎬ下翼面壅塞流动以前缘脱体正激波为主要特征ꎬ翼段下半部多余流量从翼段前缘溢流口向翼段上半部泄流ꎮ该阶段ꎬ翼段受超声速地面效应影响ꎬ压心位置和悬浮姿态相对稳定ꎬ受到正升力和电磁拉力ꎬ翼段上浮ꎮ与流场分析相对应ꎬ图8给出了加速过程中的翼段质心垂向位移和俯仰角的演变曲线ꎮ可以看出ꎬ在第1阶段ꎬ质心垂向位移和俯仰角曲线较为顺滑ꎮ质心高度不断下降ꎬ最大位移量为-0.1mꎬ翼段连续低头ꎬ最小俯仰角约为-3.8ʎꎮ在第2ꎬ3阶段ꎬ由于气动压心 后移-前移-后移 和升力 负-正 的迅速转变ꎬ该阶段内的质心位移和俯仰角曲线出现明显振荡ꎮ特别地ꎬ对于第2阶段ꎬ在下翼面壅塞消失过程中ꎬ原本宽泛的低压区迅速缩小直至消失(图7(e))ꎬ前缘压力得到恢复ꎬ同时前缘上表面局部超声速低压区开始显现ꎬ这一高一低造成翼段整体抬头趋势较明显ꎮ而当处于第3阶段ꎬ壅塞再现ꎬ随着上翼面恢复激波S2的后退和低压区的扩大ꎬ上下翼面流动特征趋近并相对稳定ꎬ压心始终位于质心附近ꎬ抬头趋势被抑制ꎬ俯仰角和质心位移整体保持平稳振荡ꎮ在第4阶段ꎬ质心位移和俯仰角的平均值先基本不变后略微降低ꎬ曲线的振幅明显减弱但频率明显升高ꎮ进一步地ꎬ对助推加速过程中的翼段气动力/力矩系数进行研究ꎬ其中参考面积为Sreff=1m2ꎮ从图9可以看出ꎬ翼段气动载荷变化规律和图8中姿态变化规律相近ꎬ图8㊀翼段质心位移和俯仰角演变Fig.8㊀Evolutionofcentroiddisplacementandpitchangleofthewing图9㊀翼段气动载荷系数演变Fig.9㊀Evolutionofaerodynamicforcecoefficientsofthewing因此ꎬ亚声速地面效应对翼段运行姿态的影响特点可简要总结为基本无振荡ꎻ跨声速地面效应诱导翼段运行姿态低频大幅振荡ꎻ而超声速地面效应诱导翼段运行姿态高频小幅振荡ꎮ2.2㊀翼段稳定性分析2.2.1㊀气动-电磁弹性系统稳定性讨论通过前述分析发现ꎬ在跨/超声速运行阶段尤其是第2ꎬ3阶段ꎬ流场变化显著ꎬ翼段受到较强的非定常气动载荷冲击ꎬ表现出大幅度周期性振荡ꎬ容易产生稳定性问题ꎮ实际上ꎬ电磁悬浮力可认为是弹性力ꎬ这与传统的气动力-结构弹性力所构成的气动弹性问题类似ꎮ因此ꎬ本节从方程相似角度对悬浮加速运行稳定性进行分析ꎮ无外力干扰下的经典二元翼段弹性体颤振控制方程[34]分别由质心动力学方程和绕动点刚心E的转动方程建立ꎬ可写为m(y㊆E-θ㊆Exa+g)+CyEy +KyEy=L=QyE(19)IEθ㊆E-m(y㊆E+g)xa+CθEθE+KθEθ=Mair-Lxa=QθE(20)式中ꎬ广义坐标yE和θE分别是弹性体刚心的沉浮位移和绕刚心的俯仰角ꎻIE表示绕刚心转动惯量ꎻxa为质心与刚心距离且质心位于刚心后方ꎻCyE和CθE分别为翼段弹性体刚心沉浮和俯仰阻尼系数ꎻMair是对质心的气动力矩ꎻKyE和KθE分别为翼段弹性体沉浮和俯仰刚度系数ꎻ两式等号右边QyE和QθE分别对应刚心气动升力和刚心气动力矩ꎮ相较之下ꎬ虽然本文所考察的电磁弹性力-气动力系统(式(16)~(17))暂不考虑结构弹性和结构阻尼ꎬ即已略去与xa和结构阻尼有关的量ꎬ但由于有电磁外部力的约束且不显含广义坐标θꎬ也具有一定复杂度ꎮ特别地ꎬ在小攻角振荡假设下ꎬ式15气体物理2024年㊀第9卷(16)~(17)可改写为m(y㊆+g)+2ky+k(lA-lB)θ=L(21)Iθ㊆+k(l2A+l2B)θ=Mair-k(lA-lB)y(22)将式(19)~(20)与式(21)~(22)对比ꎬ不难发现ꎬ由电磁弹性力-气动力耦合模型推导出的弹性动力学控制方程与经典气动弹性控制方程形式类似ꎮ主导电磁悬浮近地加速系统的不稳定性因素主要存在3项ꎮ一是悬浮高度hꎬ该项直接影响地面效应和相关气动载荷ꎬ即方程等号右边的升力项L和力矩项Mairꎮ二是悬浮刚度kꎬ其直接影响了系统的刚度ꎮ三是悬浮磁体间距ꎬ由lA和lB决定ꎮ以下分别对悬浮高度㊁悬浮刚度和磁体间距对系统稳定性的影响开展研究ꎮ2.2.2㊀悬浮高度对系统稳定性的影响控制磁体间距和悬浮刚度不变ꎬ研究了不同初始相对悬浮高度h/l=0.5ꎬ1.0ꎬ1.5对系统稳定性的影响ꎮ图10给出了不同相对悬浮高度下翼段近地加速过程中质心位移和俯仰角演变曲线ꎮ可以看到ꎬ当增加悬浮高度ꎬ由于下翼面阻塞度减小ꎬ流动产生壅塞所需的Mach数增加ꎬ地面效应减弱ꎬ因此第1阶段向第2阶段的转变Mach数明显延后ꎬ但质心位移和俯仰角曲线的振荡幅度在不同悬浮高度下仍基本一致ꎮ此外ꎬ不同悬浮高度下ꎬ第3阶段向第4阶段转变的阈值基本不变ꎮ这主要是由于第3向第4阶段转变的标志是恢复激波S2退出上翼面ꎬ而不同离地悬浮高度下上翼面流动特征基本一致ꎮ(a)Centroiddisplacement㊀㊀㊀(b)Pitchangle图10㊀不同悬浮高度下翼段加速质心位移和俯仰角演变Fig.10㊀Evolutionofcentroiddisplacementandpitchangleofthewingatdifferentsuspensionheights上述结果表明ꎬ增加悬浮高度能够缩短跨/超声速地面效应气动激励的作用时间ꎮ并且ꎬ翼段在第4阶段的质心垂向高度下降更快ꎬ俯仰角曲线振荡的平均值基本趋于0ʎ攻角ꎬ但振幅略有增加ꎮ从系统稳定性来看ꎬ适当增加悬浮高度有利于减弱地面效应ꎬ从而提高系统稳定性ꎮ但考虑到工程可实现性ꎬ悬浮高度的可调节范围受诸多限制ꎬ对于实际工程应做进一步讨论ꎮ2.2.3㊀悬浮刚度对系统稳定性的影响控制悬浮高度和磁体间距不变ꎬ通过在悬浮刚度k0基准上依次扩大10倍和50倍ꎬ研究不同悬浮刚度下的系统稳定性ꎮ图11给出了悬浮刚度k=k0ꎬ10k0ꎬ50k0下翼段近地加速过程中质心位移和俯仰角演变曲线ꎮ图11表明ꎬ当增加悬浮刚度至10k0ꎬ50k0时ꎬ在加速前期阶段ꎬ翼段的质心沉浮位移和俯仰角的振荡幅度能够被有效抑制ꎬ位移振荡范围均限制在ʃ10mm区间ꎮ但较大的悬浮刚度反而导致翼段更高频的振荡ꎬ直至发散ꎬ其中俯仰角最大值约40ʎꎬ远远超过失速迎角ꎬ严重破坏了系统稳定性ꎮ并且ꎬ悬浮刚度50k0相比10k0工况的发散更加提前ꎬ出现在亚声速域ꎮ(a)Centroiddisplacement25第1期罗星东ꎬ等:电磁助推翼段加速地面效应及稳定性分析(b)Pitchangle图11㊀不同悬浮刚度下翼段加速质心位移和俯仰角演变Fig.11㊀Evolutionofcentroiddisplacementandpitchangleofthewingatdifferentsuspensionstiffness为解释系统发散现象ꎬ进一步地ꎬ对不同悬浮刚度下翼段加速过程中的沉浮位移和俯仰角进行时频分析ꎮ图12给出了加速过程中各频率翼段沉浮及俯仰运动随Mach数变化的能量分布ꎮ其中ꎬ红色区域表征翼段运动能量集中频率ꎬ红色长虚线和短虚线分别表示无气动激励下翼段自由振荡的1阶及2阶固有频率ꎮ可见ꎬ当悬浮刚度为k0时ꎬ翼段沉浮与俯仰运动的频率均偏离自由振荡系统固有频率ꎮ翼段的运动主要受到气动力/力矩周期性脉动激励ꎮ随着Mach数增大ꎬ气动激励由亚声速阶段的简单低频激励(约1Hz)发展为跨声速阶段的复杂低频激励(1Hz与8Hz共存)ꎻ在超声速阶段ꎬ激励频率进一步升高ꎬ并引发系统以高于2阶固有频率的振动(20Hz左右)ꎮ当悬浮刚度增大至10k0时系统悬浮刚度加强ꎬ悬浮力足以克服亚跨声速阶段的气动激励ꎬ但随着固有频率升高ꎬ气动激励与系统2阶模态发生耦合ꎬ加之悬浮系统阻尼不足ꎬ诱发系统以2阶特征频率发生颤振式的不稳定振动ꎮ当悬浮刚度增大至50k0时ꎬ系统1阶与2阶固有频率进一步升高并趋近ꎬ气动激励同时与1阶㊁2阶模态发生耦合ꎬ从而诱发系统提前在Ma=0.8时发生不稳定振动ꎮ从另一方面讲ꎬ若减小电磁助推加速的目标速度至系统发散前(如Ma=1.2)ꎬ限定系统悬浮刚度k0<k<10k0ꎬ则在该范围内增加悬浮刚度能够显著减弱系统振荡幅度ꎬ提高系统稳定性ꎮ2.2.4 悬浮磁体间距对系统稳定性的影响控制悬浮高度和悬浮刚度不变ꎬ进而研究不同悬浮磁体间距下(lm=lA+lB=0.5l0ꎬ1.0l0ꎬ2.0l0)的系统稳定性ꎮ式(16)~(17)表明ꎬ增加磁体的前后纵向间距ꎬ可以增大电磁悬浮力的力臂ꎬ从而增加系统的俯仰刚度ꎮ图13给出了不同磁体间距下翼段近地加速过程中质心位移和俯仰角演变曲线ꎮ结果表明ꎬ增加悬浮磁体间距ꎬ能够大幅抑制加速过程中的质心沉浮位移和俯仰角的振荡幅度ꎬ但翼段在第4阶段的振荡频率略有升高ꎮ减小悬浮磁体间距ꎬ翼段出现明显沉浮和俯仰振荡的速域提前ꎬ并表现为低频大幅振荡ꎮ(a)k=k0(b)k=10k035。
真空衰变(Vacuumdecay)
真空衰变(Vacuum decay)abstractPlease describe the entry in a few words and add a summary right away. Vacuum decay - the basic principle of introducing quantum theory is Werner Haisenberg (Werner, Heisenberg)Uncertainty principle. According to this principle, all attributes of a quantum object are not fully determined. For example, a photon or an electron cannot have definite positions and definite momenta at the same time. For a certain moment, it is impossible to have definite energy. What we are concerned about here is energy uncertainty. Although the energy in the macrocosm is conserved (it neither creates nor disappears), the law fails in the Ahara Koko domain. Energy can spontaneously occur unpredictable changes. The shorter the time interval considered, the greater the quantum random fluctuations. In fact, particles can borrow energy from somewhere we don't know, as soon as the energy is returned. Heisenberg uncertainty principle requires accurate mathematical form the bulk of the energy lending must be quickly returned, and a small amount of borrowing can be kept for a long time.Vacuum decay - more detailsEnergy uncertainty leads to some strange effects, like particles such as photons can suddenly be created out of nothing, but later it immediately disappear again, the probability of occurrence of this phenomenon is a strange effect in the. The particles depend on borrowed energy and therefore survive on borrowed time. We do not see them because they are justlightning flashes, but they do leave traces of their existence in the characteristics of the atomic system, which can be measured. In fact, the usual vacuum is indeed filled with streams of such instantaneous particles, not only photons but also electrons, protons, and other particles. In order to distinguish the instantaneous particles from the permanent particles which we know more, the former is called the imaginary particle, while the latter is called the real particle.Except for the instantaneous, the imaginary particles are exactly the same as the real particles. In fact, if in some way from the outside enough energy to repay the Heisenberg energy borrowing, so it is possible to upgrade the virtual particle real particles, and there is no difference with other species of real particles. For example, a virtual electron can only exist in a typical case10-21 seconds. In its short lifetime, the virtual electron is not stationary; it can pass 10-11 centimeters before it disappears (compared to an atomic diameter of about 10-8)Cm). If the virtual electron gets energy in such a short time (say, from the electromagnetic field), it does not necessarily disappear, but can continue to exist as a completely ordinary electron.Although they can not see these imaginary particles, they are really in the vacuum. This is not only because the vacuum contains a potentially permanent library, but also because although they occur in half true half empty form, the quantum entity of the phantom would still leave traces of theiractivities, but also can detect. One of the effects of virtual photons, for example, is a very small deviation of the energy levels of an atom. They also make minute changes in the electron magnetic moment. These minor but important changes have been accurately measured by spectroscopic techniques.Given that subatomic particles are generally free to move, but that they are subject to various forces associated with the particle type, the above simple quantum vacuum image is to be modified. This force also acts on the corresponding virtual particles. As a result, there may be more than one vacuum. The existence of many possible quantum states is a universal feature of quantum physics. The atomic energy levels are best known. Here, an electron orbiting an atom can have some very definite states of energy, and these states correspond to definite energies. The lowest level is called the ground state, and it is stable. Higher energy levels are called excited states, and they are unstable. If an electron breaks into a higher energy state,It will go down and return to the ground state, and there are more than one way to transition. This excited state has a definite half-life of decay.The same principle applies to vacuum. It can have one or more excited states. These excited states have different energies, but their actual appearances are exactly the same, that is, vacuum. The lowest energy state, that is, the ground state, sometimes called the real vacuum, reflects the fact that it is stable, and corresponds roughly to the vacuum region of today's universe. The excitation vacuum is called the pseudo vacuumstate.It should be said that pseudo vacuum is still a purely theoretical idea, and its nature depends to a great extent on the specific theory used. But the pseudo Vacuum States naturally appear in all the theories that attempt to unify the forces of nature at present. The basic forces now recognized appear to be4: familiar with the daily life of the gravitation and electromagnetic force, and two kinds of short-range nuclear forces, weak and strong. The list used to be longer. For example, electricity and magnetism have been regarded as very different things,The unified process of electricity and magnetism began in the early nineteenth Century. At that time, Hans Christian Oster (Hans, Christian, Oersted) found that the current produced a magnetic field, and Michael FaradMichel Faraday found that the moving magnet produced electricity. It is clear that electricity and magnetism are intrinsically related. But, until 1850s, James Clark MaxwellJames Clerk MaxwellOnly the details of the connection were indicated. Maxwell described these electromagnetic phenomena accurately through a set of mathematical equations, and predicted the existence of electromagnetic waves. It was not long before people realized that light was also an example of such waves, and thatother forms of waves, such as radio waves andX ray. Therefore, two different natural forces on the surface - power and magnetism - are the two manifestations of a single electromagnetic force, which have some of their own unique phenomena.In recent decades, this process of unification has been further developed. According to the current understanding of the electromagnetic force and the weak nuclear force is linked, is part of a single "weak force". Many physicists believe that, as part of the so-called "grand unification" theory, it will prove to be associated with electrical forces in the future. Not only that, allThe 4 forces may be synthesized at a sufficiently deep level into a single force.In an attempt to unify electroweak force and force some grand unified theory predicts a promising inflationary force. A key feature of these theories is that the pseudo vacuum energy is surprisingly large: typically, 1 cubic centimeter spaces contain10^87 Joule energy! Even the size of an atom will have the energy of 10^62 joules. A stimulated atom has only 10^-18The energy of about joules, compared to the latter, is negligible. Therefore, to stimulate the vacuum, requires a lot of energy, but in today's universe in which we hope will not find this state. On the other hand, once there are extremeconditions for the big bang, these figures are more telling.The enormous energy associated with a pseudo vacuum has a strong gravitational effect. This is because energy has mass, and Einstein has pointed it out for us, so it can be attracted by gravity like normal matter. The enormous power of quantum vacuum has great appeal: 1Cubic centimeter pseudo vacuum mass weighs 10^64 tons, which is about the mass of today's observable universe (about 10^48)) still big! Have no use for this abnormal gravity on inflation, which requires some kind of anti gravity process. But the enormous pseudo vacuum energy is associated with the same enormous pseudo vacuum pressure, and this pressure is wonderful. Normally, we don't see pressure as a source of gravity, but this pressure is a source of gravity. In a general object, the gravitational effect of an object's pressure is negligible compared to the gravitational effect of the mass of the body. Such as,The body weight of less than 1/1000000000 is produced by the pressure of the earth's interior, however, this effect does exist, and the system is in a huge pressure, the pressure can be compared with the quality of quasi gravity gravity.In the case of pseudo vacuum, there is tremendous energy, but also a huge pressure similar to it, and its mutual struggle for control over gravity, but the key nature is that the pressure is negative. The pseudo vacuum acts not as repulsion, but as attraction. Now negative pressure has a negative gravitationaleffect, which is called anti gravity. Thus, the gravitational attraction of pseudo vacuum comes down to the competition between the enormous attraction of its energy and the repulsive effects of its negative pressure. The final pressure won, the net effect is to produce a very large repulsive force, it can in an instant the universe burst. This is a huge thrust of inflation, so that the scale of the universe to speed the pace of eachDoubles in 10^-34 seconds.In its intrinsic nature, the pseudo vacuum is unstable. Like all excited quantum states, it decays to return to the ground state - the real vacuum. After dozens of ticks, it decays. As a kind of quantum process, it is bound to show discussed above can not avoid the unpredictability and random fluctuations, these properties are related with the Heisenberg uncertainty principle. This means that the decay is not homogeneous in the whole space, but there is fluctuation. Some theorists believe that these fluctuations may be the reason for the intensity fluctuations observed by cosmic background radiation detection satellites.In the pseudo vacuum decay after the universe regained its normal expansion speed, into the explosion by inflation. The energy enclosed in the pseudo vacuum is released and appears in the form of heat. The inflation produced the huge expansion of the universe cooled until the temperature is close to absolute zero, then inflation ended suddenly again heated to the universeOne thousand and twenty-eightExtreme high temperature. Today, the vast reservoir of heat has almost completely disappeared, leaving behind the cosmic background heat radiation. As a by-product of vacuum energy release, many imaginary particles in quantum vacuum acquire part of their energy and change into solid particles. The remains of these particles have survived until now, becoming 10^48 tons of materials that form you, me, the galaxy, and the entire observable universe.。
电针疗法 Electroacupuncture-1 (英文)
treatments has been mentioned since ancient times with the earliest man-made records (2750 BC)discussing the electrical properties and treatment potential of the Nile catfish, Malopterurus electricus. The Roman physician, Scribonus Largus, introduced the electrical capabilities of the fish into clinicalmedicine as a cure for intractable headache pain,neuralgia, joint inflammation, and gout.of controlled electrical currents from electrostatic generators for numerous medical problems involving dental pain.In China electro stimulation of acupuncture pointsstarted around 1950.The basics of electricityWhat is electricity?What is the electromagneticforce?is a general term for phenomenon relating to the flow of charge or wave of energy . The fundamental force associated with electric and magnetic fields.The basics of electricity Electric current What is a volt?An electric current is a flow of electric charge. In electric circuits this charge is often carried by moving electrons in a wire. It can also be carried by ions in an electrolyte, or by both ions and electrons such as in a plasma.The unit for measuring an electric current is the ampere A volt is a unit of measurement of force, or pressure, in an electrical circuit.It is also described as the potential difference between the negative and positive ends (terminals) of a circuit. No more than 40 V is used in today clinical practiceThe basics of electricityLess than 1 mA( milliamp)-no sensation More than 1 mA-sensation that something is scrolling on the skin surface 2 mA–causes trembling of muscles4 mA-pain sensationUsually the current is between 1-2 mA( no more that 4 mA)Direct current vs Alternating currentunidirectional flow of electriccharge.AC, or alternating current,reverses the direction of itscharge cyclically.electrolysis, and electrolytic degradation of the acupuncture needle almost is not used in modernpracticeThe basics of electricityFrequency is the measure forrepetition of an event. Theunit for frequency is theHertz (Hz). 1 Hz is equal to 1cycle per second.Lower level stimulation from 4-40 Hz (centered around 20 Hz) primarily results in endorphin generation at the brainstem level and enkephalin generation at the local level. This produces analgesia which is similar to exogenous morphine.The middle level frequencies around 100 Hz produce rapid, onset local analgesia through the production of local dynorphins at the spinal or brainstem nuclear level. This analgesia occurs quickly and also dissipates rapidly on cessation of the EA.The higher frequencies (around 200 Hz) produce some dynorphins, but mostly also lead to serotonin release. This leads to descending neural control of segmental pain thresholds and also causes increase circulating serotonin levels to alter systemic pain thresholds.Acupuncture Stimulator KWD808-IAcupuncture Stimulator KWD808-IAdjustable Frequency and Intensity Adjustable Sensitivity probe-Point Locator Build-in Timer Five Buttons Wave Form Selection Frequency Indicator Green Led Light Power Green Led Light DC 9V (1.5x6) Size CR14 UM2 Battery Multi-Purpose Health Device Provide electro-needle therapy TENS Assisting to Detect AcupointsAcupuncture Stimulator KWD808-IThere are five types of pulse waves to be selected: Continuous wave Dense-disperse wave Intermittent wave Ripple wave Respiration wave1. Continuous WavePulse duration r = (0.5 +/- 0.15)ms; Repeated pulse frequency: f1=( 1+/- 0.5 ) Hz to ( 100 +/- 10) Hz. Max Output pulse amplitude: 40V +/- 10V2. Dense-disperse Wave:Dense wave Its frequency is high, usually at 50-100 pulses per second. It can reduce the stress reaction of nerves. It first produces inhibition on the sensory nerve and then on the motor nerve. This wave is usually used to induce analgesic and sedative effects and to relax spasm of both muscles and blood vessels. In addition, it can be applied to anesthesia.2. Dense-disperse Wave:Disperse wave is frequency is low, usually at 2-50 pulses per second. It can cause contraction of muscles and enhance the tension of muscle and ligaments. It is usually used to treat flaccidity, atrophy, and impairment of muscle, muscle tendons, and joint ligaments.2. Dense-disperse Wave:Dense and disperse waves display alternatively Disperse frequency is f1, same with base wave; FREQ2 regulates the frequency f2 of (10 +/- 3) cycles per min to (50 =/10) cycles per min2. Dense-disperse Wave: It is not easy to produceadaptability. It haspromote metabolismand blood circulation,improve tissue nutrition,eliminate inflammatoryedema. It is usually usedto treat sprain of joints,arthritis, neuralgia, andparalysis and so on.3 Intermittent wave This is a rhythmically-interrupted electric wavewhich occursstops, there is no impulseoutput . When itcontinues, it is a densewave. It is not easy forintermittent wave to causeadaptation in the body. Itcan enhance the excitationof muscular. It is usuallyselected for atrophy andparalysis.4. Ripple Wave Its amplitude increasesto maximum and dropsto zero suddenly,The frequency: (10 +/-3)cycles /min to (50 +/-10)Cycles/min.The Max output plusamplitude range is over5V to 30V5. Respiration Wave Its amplitude increasesto maximum and dropsthe process.The wave isautomatically in aserrated form 16-20times or 20-25 times perminuteAnalgesic: Continuous Wave (Dense wave), Dense-Disperse wave.Improve Blood Circulation: Dense-Disperse wave.Increase absorption of tissue fluid: Disperse and Respiration waves.Excitement of muscle and nerve waves: Intermittent, Respiration, Ripple andDisperse waves.Stimulations of collagenous tissue: Disperse wave.a. At least two points each time. It is appropriate to choose 1-3 pairs of acupoints.b. Principles of selecting points is similar to that of acupuncture method.c. Sometimes select points on the pathway of a nerve.a. Obtaining the arrival of qib. Adjust all the output knobs of electro-acupuncture machine to ‘0’c. Switch on the electric powerd. Connect the output wires to the handle of the needlese. Choose the wave form and frequency and adjust the output current form from small to such an extent thatthe patient can endure it and feel comfortable.Turn the output knobs back to ‘0’, when the treatment is overRemove the wires and switch off the power supply.Withdraw the needle as usualCheck the indicator light to make sure the output is normal before each treatment.Don’t switch on or off the power when the wires are connected to the needles.Adjust the flow of electric current gradually from small to large. Prevent to amplify the current suddenly.In treating patients with heart disorders, prevent the current from going through the heart.Don’t use strong current at the points close to medulla oblongataDon’t use electro-acupuncture for pregnant womenDo not use electric acupuncture on patient with pacemakerPain neuralgia, traumatic injury to peripheral nerves, Parkinson’s diseases, dental pain, toothache,stomachache, abdominal pain, migrainedysmenorrhea, lumbago, sciatica, arthritis.Psychological disease: mania, depression, hysteria, schizophreniaDigestive diseases: prolapse of stomach, peptic ulcerCardiovascular disease: hypertension, hypotension, coronary heart diseasesRespiratory diseases: chronic bronchitis, bronchial asthma Urinary diseases: urinary calculi, enuresis, retention of urineGynecological diseases: dysfunctional uterine bleedingNeurological disease: hemiplegia, paralysisFive sense organs disease: optic atrophy, myopiaOthers: quitting smoking, obesitytrigeminal neuralgia: zanzhu(BL-2) and yangbai(GB-14) for the first nerve branch; sibai(ST-2) with xiaguan(ST-7) or quanliao(SI-18) for the second branch; chengjiang(CV-24) and xiaguan(ST-7) for the third branch.sciatica: points are selected from huantiao(GB-30), zhibian (BL-54), yanglingquan(GB-34), xuanzhong(GB-39), yinmen(BL-37), and weizhong(BL-40).pain of greater occipital nerve: fengchi(GB-20) and an ashi point.migraine: fengchi(GB-20) and shuaigu(GB-8).periarthritis of the shoulder: select from jianyu(LI-15), jianliao(TB-14), jianzhen(SI-9), naohui(TB-13), binao(LI-14) and quchi(LI-11).injury of the knee joint ligaments: liangqiu(ST-34) and dubi(ST-35).tennis elbow: quchi(LI-11) and ashi point.kidney pain: jingmen(GB-25) and ashi point.abdominal pain: bilateral tianshu(ST-25).intestinal adhesion pain: local points on both ends of the operation scar.bone fracture: use points at the center of the fracture and at the ends of the fracture zone (e.g., for humerus fracture, jianyu(LI-15) and quchi(LI-11) represent the ends of the fracture zone; for femoral fracture, xuehai(SP-10) andbiguan(ST-31) are the ends).For flaccidity (wei) syndromes, select either 2 or 4 of the points to needle with electrical stimulus; the sets of points needled can vary from day to day, alternating from one set to the other and back again):paraplegia: select from biguan(ST-31), futu(ST-32), zusanli(ST-36), and jiexi(ST-41) as one group; a second group is zhibian(BL-54), chengfu(BL-36), yinmen(BL-37), weizhong(BL-40), chengshan(BL-57),and kunlun(BL-60).Indicationshemiplegia: jugu(LI-16), jianyu(LI-15), jianliao(TB-14), binao (LI-14), quchi(LI-11), waiguan(TB-5), shousanli(LI-10), and hegu (LI-4) are used for upper extremity paralysis; huantiao(GB-30), biguan(ST-31), zusanli(ST-36), yanglingquan(GB-34), sanyinjiao(SP-6), and jiexi(ST-41) for paralysis of the lower extremities.facial paralysis: do not use electro-acupuncture in the initial phase, as it may cause spasm. It can be used at the later stage, for example: taiyang(extra point) and zanzhu(BL-2) or sibai(ST-2) for incomplete closing of the eye; yingxiang(LI-20 and quanliao (SI-18 or xiaguan(ST-7) for difficulty sniffing; either dicang(ST-4) and jiache(ST-6) or xiaguan(ST-7 and dicang(ST-4) for difficulty in blowing out the cheeks; and heliao(LI-19) anddicang(ST-4) for deviation of the philtrum.Nociceptive pain is caused by damage to body tissue and usually described as a sharp, aching, or throbbing painNeuropathic pain occurs when there is actual nervedamage.When detecting acupoint, The "timer" should be set to "OFF" and press "detective" at the same time. Insert the penplug into " detective out" socket (A or B), then adjust the "APD" knob until hearing a sound cue. Then, slowly adjust counter-clockwise until a suitable setting is found. Now hold the pen in your hand and place the point on your body until both a signal and light appear which shows the exact location ofacupoints.When detecting acupoint, "APD" is set to any position, there is no indication that shows your skin is too wet. You should dry the skin before detecting. If you regulate the knob to over 7.5, the device will emit a sound cue. At this time, the skin is too dry -wet theskin in order to continue.During the course of detecting, the correct method is to press the head on the acupoint with slight pressure in a point/touch way. It is also incorrect to touch and press the acupoint for a longer time, for this causes a false reflection point (as cautioned by an unclearsound cue).Based on the fact that the resistance of certain body points is different than others, and due to differing skin electrical resistances due to sex, age, health, and season, the electric current used must be adjusted slowly until comfortable.When detecting is complete, "APD" knob should beturned to the "0" position.1960-The First Tuberculosis Hospital of Shanghai succeeded in pneumonectomy.1960-1970 satisfactory results were obtained in cardiac surgery, gastrectomy, laryngectomy, cesarean sectionetc.All sensations except the pain remain intactPatient stays conscious and interactiveSafe ( no risk of overdose, no anaphylaxis, no damage to the liver of kidney)No adverse after effect like amnesia or unarousable Less bleeding during the operationPromote faster recoveryDisadvantagesIncomplete analgesiaIncomplete muscle relaxation ( mainly abdominal)Pulling of organs in abdominal cavity can cause nauseaand discomphort。