基于ADAMS建模与基于UG建模的比较研究
基于UG和ADAMS的运动学联合仿真分析
: ! _ ! : . . . . . . . . 一
修
改
模 型 导入到 A D A M S
————]1———~
. . ..... ..... ....
: ! . . ! : . . . . . . 一
绪
^ n ^ l I s j 穗加 复杂 妁 柬 、 驱 动 ,力
块包 括 A DAMS , V i e w和 AD AMS / S o l v e r 。
焊接 机 器 人 主要 有 底 座 、躯 干 、肩 、手 臂 、手腕 、机械 手
6 部分 组成 。在 U G中建立 焊接机 器 人 的各零 部件 , 装 配后 得到
一 实体 模 ~ 焊接 机器人 型, 见图 2 所示。
中 圈分 类号 : T P 3 文献标 识码 : A 文章 编号 : 1 6 7 1 —7 5 9 7( 2 0 1 3 )0 3 1 — 0 6 0 — 0 2
u G生 成 零 件 实 体
£ I G装 配 总 成 — ——— Tr——一
. .... . . ... ..
二二][
构 参 数
A D ^ 懈 动 力 学 仿 真
, , 嬉 粜 谶 行
\
勋
图3 焊 接机器人模拟样机模型
ห้องสมุดไป่ตู้
l宪成分析
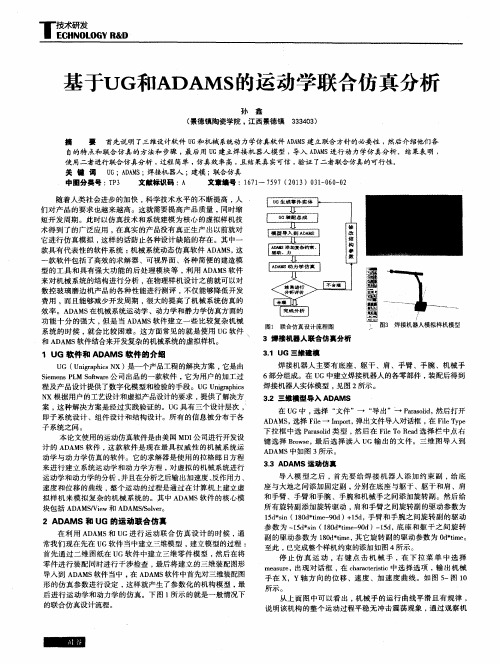
图1 联合仿真设计流程图
3 焊接 机器人 联 合仿 真分析
3 . 1 UG三 维建 模
1 U G 软件 和 A D A MS软件 的介绍
U G( U n i g r a p h i c s N X) 是一 个产 品工程 的解决 方案 , 它是 由 S i e m e n s P L M S o f t w a r e 公 司 出 品的一 款软 件 , 它 为 用户 的 加工 过 程及 产 品 设计 提供 了数 字 化模 型 和检验 的 手段 。U G U n i g r a p h i c s N X根 据 用户 的 工艺设计 和 虚拟 产 品设 计 的要 求 , 提供 了解决 方 案 , 这 种 解决 方 案是 经 过实 践 验证 的。U G具 有 三个 设计 层 次 , 、 即 子 系统 设 计 、组 件设 计 和 结构 设 计。所 有 的信 息被 分 布于 各 子 系统 之 间 。 本 论 文使 用 的运 动仿 真 软件是 由美 国 MD I 公 司进 行开 发设 计的A D A MS 软件 , 这 款 软 件 是现 在 最具 权 威 性 的机 械 系统 运 动 学 与 动力 学 仿 真 的软 件 。它 的求 解器 是使 用 的拉格 郎 日 方 程 来 进 行 建立 系统 运 动学 和 动力 学 方程 , 对 虚 拟 的机 械 系统 进行 运 动学 和动力 学 的分析 , 并 且在 分析 之后输 出加 速 度 、 反 作用力 、 速 度 和 位 移 的 曲线 , 整个 运 动 的过 程是 通 过 在计 算 机 上建 立虚 拟样 机 来 模 拟 复 杂 的机 械 系统 的。其 中 A D A M S软件 的核 心模
基于UG和ADAMS的高压开关弹簧机构动力学仿真和优化

在整个过程中受力幅值存在较大的波动, 这对凸轮
GRAVITY 机构的抗疲劳强度会有很高的要求, 也直接导致轴 承使用寿命的降低。
图 3 UG 装配环境及弹簧 操作机构总装模型
( a) 合闸运动状态 ( b) 分闸运动状态
图 4 ADAMS 中弹簧机构分、合闸 运动状态虚拟样机模型
表 1 合闸、分闸工作状态初始位置与姿态
1
2
6 8
5 7
9
10
11
3 12 4
13
14 15 17 16 19 18
20
图 1 弹簧操作机构工作原理
出动力特性与断路器的负载特性相匹配, 如何合理 设计和改进断路器的弹簧操作机构、缓解各机构所 受的冲击, 已成了解决高电压等级大开断电流的断 路器中重要问题之一。这些问题成为影响产品质量 的关键问题, 也是设计中急待解决的问题[ 2] 。
Kinematic Simulation and Optimization for Spr ing Oper ating Mechanism of Cir cuit Switch Based on UG and ADAMS
LI Shi-yun, TANG Fu-yang
( Kunming University of Science and Technology, Kunming 650093, China)
1 弹簧操作机构动力学模型的建立
收稿日期: 2007 - 12 - 17; 修回日期: 2008 - 02 - 18
笔者利用多体系动力学的拉格朗日乘子法, 建
基金项目: 云南省中青年学术技术带头人基金资助( 2006PY01- 03) 。
作者简介: 李世芸( 1965- ) , 女, 教授, 主要从事 CAD/CAE 研究。
基于UG和ADAMS的运动学联合仿真分析

基于UG和ADAMS的运动学联合仿真分析作者:孙鑫来源:《硅谷》2013年第05期摘要首先说明了三维设计软件UG和机械系统动力学仿真软件ADAMS建立联合方针的必要性,然后介绍他们各自的特点和联合仿真的方法和步骤,最后用UG建立焊接机器人模型,导入ADAMS进行动力学仿真分析。
结果表明,使用二者进行联合仿真分析,过程简单,仿真效率高,且结果真实可信,验证了二者联合仿真的可行性。
关键词 UG;ADAMS;焊接机器人;建模;联合仿真中图分类号:TP3 文献标识码:A 文章编号:1671—7597(2013)031-060-02随着人类社会进步的加快,科学技术水平的不断提高,人们对产品的要求也越来越高。
这就需要提高产品质量,同时缩短开发周期。
此时以仿真技术和系统建模为核心的虚拟样机技术得到了的广泛应用,在真实的产品没有真正生产出以前就对它进行仿真模拟,这样的话防止各种设计缺陷的存在。
其中一款具有代表性的软件系统:机械系统动态仿真软件ADAMS,这一款软件包括了高效的求解器、可视界面、各种简便的建造模型的工具和具有强大功能的后处理模块等,利用ADAMS软件来对机械系统的结构进行分析,在物理样机设计之前就可以对数控玻璃磨边机产品的各种性能进行测评,不仅能够降低开发费用,而且能够减少开发周期,很大的提高了机械系统仿真的效率。
ADAMS在机械系统运动学、动力学和静力学仿真方面的功能十分的强大,但是当ADAMS软件建立一些比较复杂机械系统的时候,就会比较困难。
这方面常见的就是使用UG软件和ADAMS软件结合来开发复杂的机械系统的虚拟样机。
1 UG软件和ADAMS软件的介绍UG(Unigraphics NX)是一个产品工程的解决方案,它是由Siemens PLM Software公司出品的一款软件,它为用户的加工过程及产品设计提供了数字化模型和检验的手段。
UG Unigraphics NX根据用户的工艺设计和虚拟产品设计的要求,提供了解决方案,这种解决方案是经过实践验证的。
基于UG建模的辛普森行星齿轮在ADAMS中运动仿真的实现

基于UG建模的辛普森行星齿轮在ADAMS中运动仿真的实现摘要利用UG参数化建模功能,建立了辛普森行星齿轮机构的三维模型,并成功将其装配体导入到专业运动仿真软件Adams中。
根据其真实的工作状态,通过添加约束、驱动,实现了对辛普森行星齿轮机构在各档位运动状态的仿真。
在后处理模块中,可以清晰的判定各个构件在不同档位时的转动方向及速度大小,更加直观的加深了对汽车自动变速器换挡机理的认识与了解。
关键词 UG建模辛普森行星机构 ADAMS仿真The Motion Simulation of Simpson Planetary Gear based on UG in ADAMS Abstract Take advantage of the parametric modeling in UG, the simpson planetary gear modeling have been made, then been imported successfully into the ADAMS. In the ADAMS, it was exerted constraint and driver according to the actual working status, and have achieved the motion simulation of the simpson planetary gear working in the different gears. In the post-processing module, it could be clearly determined what direction of rotation is and how much the angular velocity is when the various components working in different gears. It contributed to have a deeper and intuitive understanding about the gear shift principle of the automatic gearbox.Key words UG modeling Simpson planetary gear ADAMS motion simulation引言自动变速器在汽车中是仅次于发动机的关键部件,是机—电—液一体化的典型产品。
UG与ADAMS之间的图形数据传输实验

( 1) 开关 起动机的开关是起动机的关键部件, 它主要有 两方面的作用, 一是接通主电路使起动机旋转, 二是 通过拨叉把单向器推出与发动机飞轮啮合, 所以要 求电磁开关吸力大、行程大、触点能通断大电流。 ( 2) 换向器 单向器又称离合器, 它的作用是与飞轮齿环啮 合, 将转矩传递到发动机曲轴上, 并且在发动机起动 以后、高速旋转时, 反向打滑, 防止起动机电枢被飞 轮齿环带动而超速损坏。与 4105 柴油机配套的单 向器为了提高其正向传递扭矩的能力, 目前已进行 以下整改: a. 正 逐 步 采 用 一 体 化 花 套 , 取 消 保 持 架 , 使 正
STEP 是作为一个新的产品数据交换标准, 它的 出现要归功于产品数据交换的许多成熟技术及现有 的交换标准的改进。为了在功能和应用范围上覆盖 现有的交换标准, 以及解决数据交换中存在的问题, STEP 必须包括以下几个基本功能: 描述方法、资源 信息模型、应用协议、实现形式和一致性检验。STEP 在几何方面毫不逊色于 IGES, 而且还解决了 IGES 在图形和几何以外许多方面信息欠缺的问题, 但是 STEP 的许多“部分”目前尚在讨论和征求意见的阶 段, 技术还不是很成熟。 1.3 Parasolid 格式
图2曲柄滑块机构表13种文件格式输出实验文件格式输出耗时s文件大小kb输出后缀名称输出设置igesstepparasolid1563157113203igsstepxt默认值默认值160nx30版本表2三种文件格式导入实验文件格式新后缀名导入耗时s生成文件大小mb零件个数igesstepparasolidigsstpxmttxt139497578573115下转第46页?44?2007年第10期农业装备与车辆工程4结束语通过实验我们发现使用parasolid格式进行ug和adams之间的数据传输是比较理想的运用parasolid格式转换文件可以有效避免igesstep等格式在转换过程中数据丢失和出错等问题转换后的装配体各零件可以有效地被adams识别这在零部件形状复杂数量繁多时更为方便
基于UG和ADAMS的采摘机器人动力学仿真分析_李卓然

究的重点 , 包括姿态 、 位置和力学分析 。 利用 ADAMS 可以输出机械手各个关节的时间 - 位移曲线 , 取主要 的 3 个关节曲线进行输出 , 如图 4 所示 。
( 1)
z0 表示机器人的初始高度 , 取值为 260mm ; S 其中 , 取值为 6mm ; T 取值为 2mm 。 给机器人添加一个质心 运动 , 其运动的轨迹方程为 Tra X = 3 · time · cos ( 3. 14 × time ) Tra Y = 3 · time · sin ( 3. 14 × time ) Tra Z = 3 · time 将仿真时间设置为 t = 20s , 步 长 为 600 步 , 利用 ADAMS / View 模块提供的对象测量功能对机器人的每 个关节的位移进行测量 , 然后可以输出位移 - 时间曲 线 ; 利用曲线处理工具对曲线进行一阶和二阶求导 , 便可以得到机器人机械手的速度和减速度曲线 。 将模型的各个零件导入 到 ADAMS 之 后 , 零件之 间还没有添加约束 , 构件之间在 ADAMS 中是独立存 在的 , 因此需要给机器人装配体 添 加 运 动 约 束 ,ADAMS / View 共提供了 3 种类型的约束 , 包括基本约束 、 运动约束和运动副约束 。 图 3 为机器人添加约束的示意图 。 其中 , 机械臂 和执行末端的各个关节之间都是转动关节 , 因此可以
The stress in the Z direction of the robot manipulator
图 5 表示通过仿真模拟计算 , 在 Z 方向上得到的 采摘机器人的受力曲线 。 由图 5 可以看出 : 机械手在 3 个关节的受力大致相同 , 在圆锥运动时 , 变化不大 , 因此符合设计的要求 。
ADAMS与UG_SolidWorks的数据交换实践
ADA MS与UG、S olid Works的数据交换实践郁飞鹏1 贾鸿社2(1 河南科技大学车辆与动力工程学院,洛阳471003;2 中国一拖集团公司技术中心,洛阳471039)摘要 利用UG、S olid Works等三维CAD软件强大的建模功能,将建好的模型导入ADAM S,以弥补ADAM S建模能力弱的不足;讨论了ADAM S与UG、Solid Works等CAD软件的数据交换过程。
关键词:ADA M S UG Soli d W orks 数据交换中图分类号:TP391.9 文献标识码:A 文章编号:1671—3133(2005)10—0037—03Da ta exchange between ADAM S and CAD software UG and Soli d W orksY u Fe i peng1,J i a Hongshe2(1 Vech i cle&M oti ve Power Eng i n eer i n g College,Henan un i versity of Sc i ence and Technology,L uoyang 471003,CHN;2 Technology Cen ter of Ch i n a Y I TU O Group Corp.L td,L uoyang471039,CHN) Abstract CAD s oft w are such as UG and Solid Works has powerful functi on of modeling,but ADAMS has poor functi on of model2 ing.I m porting the models built in CAD int o ADAM S can strengthen ADAM S.D iscusses the p r ocess of data exchange bet w een AD2 AMS and CAD s oft w are UG and Solid Works.Key words:ADAM S UG Soli d W orks Da t a exchange1 引言ADAMS在机械系统静力学(Statics)、运动学(Ki2ne matics)、动力学(Dyna m ics)仿真方面功能强大,但其内建的造型功能相对较弱。
基于ADAMS、UG的曲柄滑块运动仿真及运动特性分析

[] 锡恺, 1 黄 郑文纬. 机械原 理( 9 1 18 年修订版 ) . [ 北京: M】 高等教 育出版
社 .9 . 1 81
械性 能 , 为工程实际提供很好 的参考数 据。
[】 2郑建荣.D MS 虚拟样机技 术入 门与提 高[ . AA 一 M】 北京: 机械工业 出版
(ol eo c ai lE gn ei ,G i o n esy u a g u h u5 0 0 ,hn) C l g fMeh nc nier g u hu U i ri,G i n ,G i o 5 0 3C i e a n z v t y z a
Ab ta t Th i e t r o g iu t r lma h n r — sie - rn c a im t n c a a trsis d r e l e s r c : e ma n s co f a r l a c i e y c u l r c a k me h n s moi h r ce t e v d si r d o i c i d d s l c me t eo i ,a c lr t n o t e t a x r s i n .T r u h e a l s f d t e si e mo e n ft e c a k ip a e n ,v lc t c ee ai fmah mai le p e so s h o g x mp e , n h l v me to h r n y o c i d a ge c a g s i i ee t s u t n p l ai n o a i l t n wh l t e mo e n f t e si e rn ,g n r t n l h n e n a df r n i ai ;a p i t f Ad ms smu ai i h v me to h l r c a k e e ae f t o c o o e d
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于ADAMS建模与基于UG建模的比较研究朱贞平谭蓉(昆明理工大学机电工程学院,昆明650093)摘要:通过对简单模型的建模和动态仿真,得出了优先选择基于UG建模导入ADAMS或优先选择基于ADAMS建模的一些准则。
给出了基于UG建模导入ADAMS的格式选择和步骤。
关键词:UG建模ADAMS建模优先选择建模步骤导入步骤ADAMS(Adams Dynamic of Analysis Mechanical System)虚拟样机软件集建模、求解、可视化技术于一体,是目前应用最为广泛的机械系统动力学仿真软件,可以非常方便的对机械系统进行静力学、运动学和动力学分析,但造型功能相对薄弱,难以创建构型复杂的零件,这通常需要借助于其他CAD造型软件。
通常应用的建模软件诸如Pro/e、UG、SolidEdge、SolidWorks、CATIA。
而这些常用软件的仿真分析功能模块又较ADAMS差,因此最好的解决办法是在三维软件环境下建模,然后以特定的文件格式输出,再导入到ADAMS中作动力学和运动学分析。
由于在导入过程中不可避免地存在模型信息损失,就要确保采用合适的文件格式是模型损失的信息量最小化。
上述软件与ADAMS通常采用和支持Parasolid核心实体技术,所以建好的模型以Parasolid(*.x_t)文件格式导出,再以Parasolid(*.x_t)文件格式导入ADAMS进行各种运动特性和力特性分析,效果较其他格式好。
以上文件的导入与导出涉及到软件之间的接口问题,涉及到版本之间匹配问题,本文重点论述UG与ADAMS的接口与导入分析。
首先在UG环境中建立,另存为Parasolid(*.x_t)格式,对于ADAMS12.0的用户来说,应该选择的Parasolid版本在UG12.0—UG17.0之间。
模型导入以后,再给各个零件添加质量、约束、力、力矩和初始条件,之后就可以进行运动学和动力学仿真分析了[1]。
1 UG建模的相关操作步骤[2]机械是若干零部件的组合,不同零部件间存在几何约束和物理约束。
建模之前,首先是分析零部件,确定主要的设计参数,设计基准和设计约束。
对于复杂模型,模型分解也就是建模分解。
这也是必要过程。
如果一个模型的结构不能直接用UG提供的实体建模,可以先绘制草图,再通过拉伸、旋转、扫成等操作建立基础特征。
尽管UG允许在一个零件上建立多个根特征,但是由于后期布尔操作起来根特征之间关联性小,所以不推荐。
所以复杂零件建模大体步骤如下。
(1)特征(Feature)分解将零件分成若干几个特征模块的组合,确定基础部件(Base part)和根特征,即基础特征(Base Feature)和附着特征。
(2)细节设计(Form Feature) 一般顺序是先粗后细,即先粗略形状,后细化细节;先大后小,即先大概轮廓,后局部细化。
先外后里,即先外部轮廓,后内部形状。
对一些典型实体结构,可以使用特征建模,比如球(Sphere)、锥(Cone)、柱(Cylinder)等基本体;以及孔(Hole)、槽(Groove)等[2]。
(3)零件装配(Assemly)零部件建好以后,就可以通过几何约束进行装配,这种装配方式称为自底而上(Bottom—Up)的装配方式。
也就是所有零件件好以后,按照装配关系不停的调入新零件。
当然也可以采用自顶而下(Up-Down)的方式装配,也就是在装配中建立几何模型,然后产生新组件,并把几何模型加入到新组建中,这时在装配中包含指向该组建的指针。
2 ADAMS建模的相关步骤创建部件有两种方法[3]:①一种是通过在创建的机械系统中建立运动部件的物理属性来创建。
部件为刚性体和柔性体。
对于刚体,ADAMS/View提供给和工造工具和固体模型。
业何以通过增加特性和布尔运算合并物体来优化几何形状。
对于柔性体,ADAMS/View提供间断的柔性体连接件和输出载荷用来使用有限元工具,也可以通过使用ADAMS/View来导入复杂的柔性体工具。
②另一种是在ADAMS/View中导入三维造型软件建立的模型。
ADAMS/Exchange可导入的标准格式有IGES,STEP,DXF/DWGHE Parasolid等。
导入之后对模型进行编辑,可以在模型上创建几何点再以这些点为元素创建ADAMS/View中提供的体。
在ADAMS/View环境下完成最终建模。
3 UG模型导入ADAMS步骤模型过程中,由于可能存在复杂的装配关系,而某些零部件对整体的运动分析影响甚小,便可忽略,需要对模型进行简化,主要取那些运动部件,以及对运动部件约束和控制的部件。
但是带有质量的运动部件在简化是需要特别注意。
(1)导出模型装配完毕后,单击主菜单栏上的【文件】→【导出】→【Parasolid】→弹出【导出Parasolid】对话框→选择所建模型→单击确定→弹出保存路径→确定路径和文件名。
文件名和路径名必须是英文。
(2)导入启动ADAMS,在弹出的对话框中选择【import a file】→单击【OK】→在弹出对话框的【file type】中选择【Parasolid】→在【file to read】中右击→【Browse】→选择步骤导出(1)的文件路径和文件→在【Model Name】栏中右击→【Model】→【Create】→在弹出的对话框的【Model Name】中输入MODEL_X(如MODEL_1)。
4建模仿真比较因为建比较复杂的模型在分析过程中会有很多影响因素,很难分清到底是哪部分处问题导致分析失真,比如模型简化不当,忽略运动服之间的内部间隙,忽略摩擦力等,哪些是处理不当造成的,这里采用简单模型,可以直观判断基于UG建模与基于ADAMS建模的造成仿真分析的差别。
(1)直齿圆柱体齿轮传动已知z1=50,z2=25,m=4mm,α=20°,两个齿轮的厚度都是50mm。
给定大齿轮转速为R1=360r/s,仿真得到小齿轮转速R2=?在ADAMS中建模分析步骤[3]:①启动ADAMS,设置工作环境;②创建大齿轮、小齿轮;③创建大齿轮与大地旋转副,创建小齿轮与大地旋转副,在大齿轮与小齿轮之间创建齿轮副,务必使啮合点的Z轴方向与齿轮的啮合方向相同,如图1;④在大齿轮上施加旋转驱动R1=360r/s;设定仿真终止时间(End Time)为1,仿真工作步长(Step Size)为0.01,运行;⑤测量小齿轮转速,如图2。
当大齿轮转速为R1=360r/s,小齿轮R2=720r/s,符合标准外啮合渐开线直齿圆柱体齿轮传动角速度与齿轮的分度圆半径成反比。
在UG中建模分析步骤(略),导入ADAMS,按照上述③施加旋转副、齿轮副以及驱动以后如图3,重复上述④仿真得到图4,与图2完全一致。
根据计算i=Z1Z2=R2R1=2,可以判断两种造型方式动态分析结果完全正确且一致。
并且可见对于简单模型特别是符合ADAMS/View建模工具栏所提供的简单模型,直接在ADAMS/View中建模较为直观方便。
可以免去导入导出过程和信息损失。
(2)行星轮系齿轮传动已知z1=50,z2=25,m=4mm,α=20°,两个齿轮的厚度都是50mm。
给定连杆转速为WH=360r/s,仿真得到小齿轮转速R2=?UG 建模导入如图5(步骤参考上文);ADAMS/View建模如图6(步骤参考照上文)。
基于UG建模导入ADAMS中创建齿轮副时发现,由于行星轮系的啮合点不固定,而是垂直于连杆并随连杆运动,使啮合点的Z轴方向与齿轮的啮合方向相同比较麻烦。
而基于ADAMS/View 则比较方图3 UG建模导入图4美国宇航局太空舱挂锁设计图5 UG建模-行星轮系齿轮图6 ADAMS/View建模-行星轮系齿轮(下转第30页) 对行星轮系,将式(5)中的a、b和H换成4、6和h,现轮6被固定,ω6=0、i6h=ω6/ωh=0。
则(5)式变为下式:i4h=u+1=69/27+1(3)用速比转换式求传动比i1h 将式(5)中的a和b分别换成1和3,得:i1H=u(1-i3H)+1(7)再将u=77/27,i3H=i4h=69/27+1,代入上式,并根据ωh=ωH,即i1h=i1H,得;i1h=i1H=u(1-i3H)+1=-6.2883结论本文推导的速比转换公式,对于计算混合轮系的传动比十分有效,且计算方便快捷。
参考文献[1]王知行,刘廷荣.机械原理(M).北京,高等教育出版社,2003.便。
先创建标记(Marker)固定在连杆中心(center),在更改(Modify)位置到啮合点处。
两类分析完全一致。
在ADAMS中,以逆时针旋转为正方向。
当杆件转速为RL=360r/s时,小齿轮逆时针转速R1=720转,即小齿轮绕大齿轮逆时针公转(牵连运动)360r/s同时,其逆时针自转(相对运动)720r/s,绝对运动(合成运动)=牵连运动+相对运动=360+720=1 080。
根据机械原理上公式ω1-ωHω2-ωH=-z2z1,已知ω1=0(与机架固定),ωH=360,z1=50,z2=25,易得ω2=1 080,实际结果和理论计算相同。
可见类型适合直接用ADAMS/View建模,比较容易创建随部件运动的标记点。
(3)机械设计师在ADAMS软件中建立虚拟样机模型后,有时需要对虚拟样机可能出现的各种情况作进一步的深入分析,如试验设计(Design of Experiment,DOE)和优化设计(Optimization)。
用人工的方式修改虚拟样机,然后进行反复的仿真分析直至获得满意的样机模型,往往需要进行大量单调重复的建模工作,花费大量的机时和人工。
而如果利用ADAMS/View提供的参数化建模和分析功能就可以大大提高分析效率[4]。
这种情况下优先选用ADAMS/View建模。
有四种参数化建模方案:①使用参数化表达式,②参数化点坐标,③运动参数化,④使用设计变量。
(4)由于BHG-1夹持器形状比较复杂,所以在UG环境下设计出装配图以后再导入到ADAMS 进行运动学和动力学分析,充分结合了二者的优势。
,通过仿真得到速度、加速度及接触力变化情况。
充分满足要求[4]。
5结论(1)对于比较简单的零件,特别是符合ADAMS/View建模工具栏能提供的模型,直接用ADAMS/View建模;。
(2)有些零件虽然比较简单,但是仿真是需要测量一(上接第20页) [2]黄茂林,马正纲,孙宁.机械原理(M).重庆:重庆大学出版社,2002.[3]张东生,陈纯.行星传动减速器封闭功率的研究[J].陕西理工学院学报,2005(3):39~41.A New Means on Calculation of Drive Ratio for Com-posite Gear TrainsZHENG Wencai,XIAO Guo,YAN Wei,DUAN Qin-hua(Industrial Manufacturing Institute of Chengdu University,Chengdu610106)Abstract:In this article one kind of new computational methodwas probed for drive ratio of composite gear trains.Based on the driveratio calculation formula of the converted mechanism of the epicyclicalgear train,three new ratios of velocity transformation formulas were eas-ily obtained.Utilize these formulas may not only be convenient but alsoprompt request out the driveratio of composite gear trains.Key words:composite gear train,drive ratio,epicyclic gear train些比较特殊的标记点的运动特性时,必须使用ADAMS/View建模;(3)对于需要进行深度设计和优化零件参数时,只要ADAMS/View能胜任,最好就用ADAMS/View建模;(4)只有当ADAMS/View太过于复杂时,才使用其他三维构型软件建模。