变位斜齿轮变位系数计算公式
变位斜齿轮变位系数计算公式
变位斜齿轮变位系数计算公式
1、定义
斜齿轮变位系数是指斜齿式传动系统的主动齿轮和从动齿轮之间实际的变位系数.斜齿轮变位系数是确定斜齿传动系统输出转速与输入转速之比的重要参数.
2、基本理论
斜齿轮变位系数的计算可以根据斜齿轮传动原理得出,斜齿轮传动系统中以滚动轮组的形式相互啮合,当主动轮齿面与从动轮齿面的啮合滚动过程中,一步步完成传动,斜齿轮变位系数的计算公式为:
K=T2/T1=√(cosα2/cosα1)
其中:K-变位系数;T1、T2-主动轮和从动轮的转速;α1、α2-主动轮和从动轮上压力角的大小;
3、计算步骤
(1)确定从动轮的压力角α2,从动轮压力角的大小主要受主动轮和从动轮的齿数和形状的影响。
压力角α2综合考虑主从轮的齿数及形状,是将从动轮的中心线与从动轮对应齿面的交边连线与从动轮的法线的夹角。
(2)确定主动轮的压力角α1,主动轮压力角的大小将直接影响到斜齿轮传动系统的变位系数。
压力角α1由主动轮的齿数及形状决定,可以根据从动轮的压力角确定。
(3) 由转速比率确定斜齿轮变位系数K,根据上式知,斜齿轮变位系数K=T2/T1=√(cosα2/cosα1)
4、示例
以下计算题示例:。
变位齿轮中心距计算公式【终于整全了】

目前手册上的跨齿数计算公式大都是近似的,有误差的,并非精确的计算公式,因而有时影响跨齿数的合理性。
就是那些精确的公式,它们在角度变位中也是有不足之处的。
而且至今在手册上似乎还未见到有斜齿精确的跨齿数计算公式。
有人说:“手册上的5.01800+'=n z k α不就是标准斜齿轮跨齿数精确的计算公式吗?”不,它算出的也是近似值(文章后面进行验证)。
笔者已退休多年,精力尚可,因而对此进行了研究、探讨,于是给出一个高度、角度变位都是情况良好的公式。
公式为:5.01)cos sin 2(+--'=παααzinv m xm W k k (用于直齿) (1)5.01)cos sin 2(+'--'=παααn n n n n n n inv z m m x W k (用于斜齿) (1)公式中的'k W 和'n W 当为高度变位直齿时, bKd xm d W 22)2(-+='; 斜齿时, b bn n n d m x d W βcos )2(22-+='。
当为角度变位直齿时, b k d xm d W 22)9.1(-+=';斜齿时, 。
cos )9.1(22b bn n n d m x d W β-+='上列公式中:d ——分度圆直径; b d ——基圆直径;m ——模数,斜齿时为n m ;z —— 齿数;___z '斜齿轮的假想齿数,ntinv inv zz αα=' ; ___α压力角,斜齿轮法面压力角为n αx —— 变位系数,斜齿时法面变位系数为n x ; ___bβ斜齿轮基圆螺旋角;k W '——直齿轮的公法线长度原始计算值 ; n W '——斜齿轮的公法线长度原始计算值 。
2、公式(1)的由来公式(1)是怎么来的?其实它的来历很简单,就是由公法线长度计算公式变换而来的。
公法线长度计算公式为 :[] sin 2)5.0( cos ααπαm x zinv k m W k ++-= (直齿) (2)[] sin 2)5.0cos n n n n n n n m x inv z k m W ααπα+'+-=((斜齿) (2) 将公式(2)中的k 移到等号左边,将k W 和n W 移到等号右边(且变为k W '和n W ')即为公式(1)。
新斜齿轮参数设计

法向公法线长 度:
Wkn=mncosan[(k-0.5)π +z'invan]+2xnmnsinan
20.07013868
此公式未考虑齿顶 降低的特例
实际基圆压力角就 是0
因有装配误差,公 法线一般选取负公 差
da=mt(z+2hat*+2xt)
假想齿数: 当量齿数:
z'=z*invat/invan zv=z/cos3β
齿根圆直径: df=mt(z-2hat*-2ct*+2xt)
59.01074228 3.252416043 55.22055551 3.043517395 1.626208021 1.626208021
hat* 端面顶隙系数:ct*
hat*=han*cosβ ct*=cn*cosβ
端面最少齿数:ztmin ztmin=2hat*/sin2at
端面变位系数:xt xt=xn*cosβ
1.03527618
20.64689649
0.965925826
0.241481457
15.5378243
(不产 生根
法向(刀具)模数:mn 1
齿数:z
57
法向压力角:αn
20
齿顶高系数:han* 1
顶隙系数:cn*
0.25
变位系数:xn
0
螺旋角:β
15
新斜齿轮设计
标准值:20 标准值:1或0.8 标准值:0.25或0.3
端面模数:mt
mt=mn/cosβ
端面压力角:at
tgat=tgan/cosβ
端面齿顶高系数:
1 1.25 2.25
61.01074228
变位齿轮的计算方法

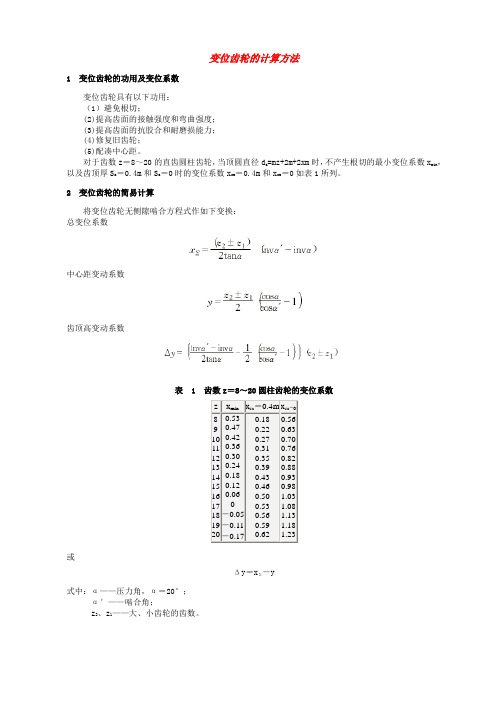
变位齿轮的计算方法1 变位齿轮的功用及变位系数变位齿轮具有以下功用:(1)避免根切;(2)提高齿面的接触强度和弯曲强度;(3)提高齿面的抗胶合和耐磨损能力;(4)修复旧齿轮;(5)配凑中心距。
对于齿数z=8~20的直齿圆柱齿轮,当顶圆直径d a=mz+2m+2xm时,不产生根切的最小变位系数x min,以及齿顶厚S a=0.4m和S a=0时的变位系数x sa=0.4m和x sa=0如表1所列。
2 变位齿轮的简易计算将变位齿轮无侧隙啮合方程式作如下变换:总变位系数中心距变动系数齿顶高变动系数表 1 齿数z=8~20圆柱齿轮的变位系数z x min x sa=0.4m x sa=08 910111213141516171819 200.53 0.47 0.42 0.36 0.30 0.24 0.18 0.12 0.06 0-0.05 -0.11 -0.170.180.220.270.310.350.390.430.460.500.530.560.590.620.560.630.700.760.820.880.930.981.031.081.131.181.23或Δy=xΣ-y式中:α——压力角,α=20°;α′——啮合角;z2、z1——大、小齿轮的齿数。
将上述三式分别除以,则得:由上述公式可以看出,当齿形角α一定时,x z、y z和Δy z均只为啮合角α′的函数。
在设计计算时,只要已知x z、y z、Δy z和α′四个参数中的任一参数,即可由变位齿轮的x z、y z、Δy z和啮合角α′的数值表(表2)中,查出其他三个参数,再进行下列计算。
一般齿轮手册上均列有此数值表。
式中正号用于外啮合,负号用于内啮合。
3 计算实例例1:已知一对外啮合变位直齿轮,齿数z1=18,z2=32,压力角α=20°,啮合角α′=22°18′,试确定总变位系数xΣ、中心距变动系数y及齿顶高变动系数Δy。
齿轮计算公式
齿轮计算公式机械制图方面=>齿轮计算公式2009-10-26 11:521 齿轮模数:m=p/π齿轮模数 m=齿距 p 除以 3.14测绘时的简易计算 m=齿顶圆直径(外径)d 除以(齿数z+2)2 齿轮分度圆直径:d=mz分度圆直径d=模数m 乘以齿数z3 齿轮压力角:标准齿轮的压力角为20度压力角标准为20度其他还有14.5度17.5度15度25度和28度4 齿轮变位系数:用范成法加工齿轮时,刀具中心线不与齿轮的分度圆相切,刀具中心与齿轮的分度圆的距离除以模数所得的商就是齿轮的变位系数。
刀具中心线在齿轮的分度圆之外,为正变位,变位系数为正,反之为负。
注:一般一对齿轮啮合一大一小相差悬殊时,小齿轮要做正变位,大齿轮做负变位,以保证它们的使用寿命比较均衡5 齿轮跨齿数:k=zα/180+0.5跨齿数k=齿数x压力角/180+0.5 (注:必须四舍五入取整数)6 齿轮公法线长度直齿公式Wk=mcosα[(k-0.5)π+zinva] 简化为;Wk=m[2.9521*(k-0.5)+0.014z]斜齿公式Wk=mcosα[(k-0.5)π+zinva]+2xtanα α=20时tanα-α=0.01490438其中:α= 压力角标准为20度其他还有 14.5度17.5度15度25度和28度K = 跨齿数 X=变位系数invα=tan(α)-α7 齿轮齿跳 Fr一般为0.025 (表示各齿跳动公差)8 齿轮齿向Fβ一般为0.008 (表示各齿向公差)9 齿轮齿形 Ff 一般为0.008 (表示各齿形状大小公差)10 齿轮齿距p=πm m 模数11 齿轮齿顶高 ha=ha*m12 齿轮齿根高 hf=(ha*+c*)m13 齿轮齿顶圆直径 da=(d+2ha) d :分度圆直径 ha ;齿顶高14 齿轮齿根圆直径 df=d-2hf=(z-2ha-2ca*)m15 中心距 a=(d1+d2)/2=(z1+z2)m/2 d1和d2配对的两个齿轮分度圆直径;z1和z2两齿轮齿数。
变位齿轮几何参数计算
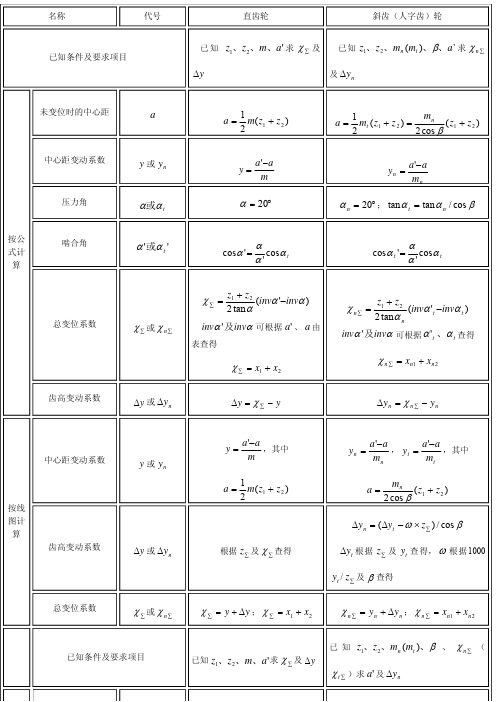
(invα '−invα )
invα '及invα 可根据 a' 、 a 由
表查得
χ ∑ = x1 + x2
χn∑
=
z1 + z2 2 tanα n
(invα 't −invαt )
invα '及invα 可根据 α 't 、α t 查得
χ n ∑ = xn1 + xn2
Δy 或 Δyn
Δy = χ ∑ − y
Δyn = χ n ∑ − yn
按线 图计
算
齿高变动系数 中心距变动系数
Δy 或 Δyn y 或 yn
根据 z∑ 及 χ ∑ 查得 y = χ ∑ − Δy
中心距
α'
α ' = a + ym
注:1.表内公式中的x、xn(xt)本身应带正负号代入;Δy、Δyt永为正号。 2.计算高度变位圆柱齿轮几何尺寸时,公式中的y或yt,Δy或Δyt均为零。
y 或 yn α或α t
y = a'−a m
α = 20°
yn
=
a'−a mn
α n = 20° ; tanα t = tanα n / cos β
按公 式计
算
பைடு நூலகம்
啮合角
α '或α t '
cosα
'
=
α α'
cosα
t
cosα
t
'
=
α α'
cosα
t
总变位系数 齿高变动系数
χ∑或 χn∑
χ∑
=
z1 + z2 2 tanα
变位斜齿轮变位系数计算公式
变位斜齿轮变位系数计算公式
解析它
变位斜齿轮是一种被广泛应用的特殊传动机构,它采用变位斜齿轮把传动精度提高到很高水平,它有变位系数,即求和运算角有助于计算精度和能量。
变位斜齿轮变位系数计算公式是:
C = KPM⋅(1 + β)
其中:C是变位斜齿轮的变位系数。
KPM是变位斜齿轮的齿数比。
β是变位斜齿轮的偏移率。
变位斜齿轮的变位系数是用来表示几种不同的变位系统的变位精度的量度,可以帮助我们计算每次传动的角度。
首先,我们需要知道变位斜齿轮的齿数比KPM,这里KPM=m:n,m和n分别表示变位斜齿轮齿对对接轮齿数,一般情况下m和n之间的商值会被假定为m:n,但是也可以选择精确表示方式,即将KPM的分母的值精确的计算出来。
第二,计算变位斜齿轮的偏移率β。
变位斜齿轮的偏移率β表示一次转动角度有一定的偏差,普通斜齿轮只可能有β=0,但变位斜齿轮由于变位对齿形的改变,导致了其转动角度有不同的
偏差,这里β的精确值取决于斜齿轮的变位样式,但也可以满足一定精度要求使用来估计为0.01或者更小的值。
最后根据以上变位斜齿轮变位系数计算公式,就可以计算出变位斜齿轮的变位系数C值,从而评估出变位斜齿轮的变位精度并满足精度要求。
(完整版)变位齿轮的计算方法
Wk=Wk*m+0.684xm
式中:Wk*——某齿数齿轮跨测k齿时,模数m=1的公法线长度。
表 2 变位齿轮的yz、xz、Δyz和啮合角α′(α=2ห้องสมุดไป่ตู้°)
α′
(分)
19°
20°
21°
yz
xz
Δyz
yz
xz
Δyz
yz
xz
Δyz
0
1
2
3
4
5
6
7
8
9
-0.00616
606
596
0.00107
118
129
139
150
161
172
183
194
205
0.00001
001
001
001
001
001
001
001
002
002
0.00768
779
790
802
813
825
836
847
859
870
0.00789
801
814
825
837
850
862
874
886
898
0.00022
023
023
024
236
246
257
268
279
290
301
312
0.00216
227
238
249
260
271
282
293
304
315
0.00002
002
002
003
003