施耐德058运动控制器接线图
施耐德SoMachine成功案例
●机器流程模块化 ●由行业专家开发 ●预编制,拖放即用
●经过测试、验证和归档的架构 ●预先定义,满足各种要求
●预编制的应用功能块,优化设计 ●简单的参数设置,拖放即用
贯穿机器生命周期各环节的增值服务
帮速高效的响应市场需求 ● 综合优化成本,品牌提升
我们点对点的定制服务可 贯穿整个机器生命周期:
Modicon M258在金属纵剪机的应用
25
Modicon M258在H型钢数控冲孔生产线的应用
28
Modicon LMC058 在雕刻机的应用
31
电子机械
Modicon M218在自动烤箱的应用
34
玻璃机械
Modicon M218在玻璃清洗机的应用
36
Modicon M238在铝条折弯机的应用
39
15 7
SoMachine软件
介绍
SoMachine是为整台机器设备开发、配置和编程的OEM 解决方案型软件平台。在同一个编程环境里,包含了逻 辑运算、电机控制、HMI设置以及相关的各种网络自动 化功能。
SoMachine基于施耐德电气灵活的控制平台来帮助编 程开发的,并为OEM提供了全面解决方案类型的产 品。将最大程度的为每台机器提供优化控制方案。
关键词: M218、XBTOT、ATV312、ATV61、ATV71
提高设备性能:15%
10
缩短上市时间:20%
降低综合成本:15%
15降低 % 能耗
> 工艺简介
转杯纺纱是从上世纪70年代以来迅速发展到大规模工 业应用的一项新技术。国内外转杯纺纱技术在近二、 三十年内不断发展。转杯纺纱机的使用是以棉纺行业 为主,现已逐步渗透到毛、麻、 丝和化纤行业,纺 纱号数从73~29 tex (8s~20s) 逐步扩展到117~14tex (5s~40s)。织物品种从机织物向低捻针织、产业用品、 装饰用品和特种用途产品方向发展。转杯纺纱线已占 全球纱线总产量的比例,以长度计达到25%,以重量计 达到40% 以上。全世界转杯纺设备头数已达到800万头 (占环锭纺锭数的5%),我国转杯纺设备头数只有约 60 万头 (占环锭纺锭数的 2%)。因此,我国和发展中国家 的转杯纺纱仍有很大的发展潜力。
施耐德伺服控制器50针引脚说明

《施耐德伺服控制器50针引脚说明》1. 引言施耐德伺服控制器在工业自动化领域有着广泛的应用,其50针引脚是其中一个重要的部分。
本文将从深度和广度的角度对施耐德伺服控制器50针引脚进行全面评估,帮助读者更好地理解其功能和用途。
2. 50针引脚的基本结构和功能施耐德伺服控制器的50针引脚是连接其它设备和组件的重要接口,主要用于传输信号和数据。
其中包括控制信号的输入和输出、电源接口、通信接口等。
在使用过程中,正确连接和使用50针引脚能够有效地实现设备的控制和数据传输,确保设备的正常运行。
3. 50针引脚的详细说明从物理接口到功能接口,施耐德伺服控制器的50针引脚具有丰富的功能和用途。
通过对每个引脚的详细说明,我们可以更清晰地了解其在设备控制和通信中扮演的角色。
第1至10号引脚用于电源输入和地线接口,第11至20号引脚用于数字输入/输出控制,第21至30号引脚用于模拟输入/输出信号等。
这些详细说明对于工程师和技术人员来说具有重要的参考价值。
4. 施耐德伺服控制器50针引脚的应用案例分析在实际的工业自动化应用中,施耐德伺服控制器的50针引脚具有丰富的应用案例。
通过对不同行业和领域的实际案例分析,我们可以更好地了解其在不同情境下的应用和价值。
在机械制造领域的数控设备中,通过对控制接口的合理应用,能够实现设备的精准控制和自动化生产;在电力系统中,通过连接通信接口,实现设备之间的数据交换和协同工作。
5. 总结和回顾通过本文的介绍和分析,我们对施耐德伺服控制器50针引脚的功能和用途有了更深入的了解。
这些了解不仅有助于我们在实际工程项目中更好地应用施耐德伺服控制器,也有助于我们更好地理解工业自动化领域的相关知识和技术。
在今后的学习和工作中,我们可以根据这些了解更好地应对相关挑战和问题,提高自己的专业能力和技术水平。
6. 个人观点和理解作为一名工程师/技术人员,我对施耐德伺服控制器50针引脚有着深刻的理解和应用经验。
7.施耐德LMC058运动控制-电子齿轮相位同步

如何使用电子齿轮和相位同步
一、电子齿轮
MC_GearIn
可以使用此模块来使从动轴速度与主动轴的相匹配。
因此从动轴的速度为主轴速度的f 倍。
f为输入参数RatioNumerator与RatioDenominator的商。
只要确定了二者的速比,模块就可以对从动轴进行加速或减速。
一旦达到指定的速度,从动轴的速度将由主动轴来决定。
如果主动轴的变量bRegulatorOn(AXIS_REF,Drive_Basic.lib)为TRUE,则将使用设置的速度值,否则使用实际值。
MC_GearOut
可以用此模块来使从动轴驱动器与主动轴脱离关系。
从动轴将以当前速度运动。
二、相位同步
MC_Phasing
可以用此模块来使主动轴和从动轴之间保持一段距离。
在这种情况下,主动轴和从动轴具有相同的速度和加速度。
为此,从动轴必须通过加速或减速来使速度与主动轴一致。
当达到此状态后,主动轴将会进行一段附加运动(与MC_MoveSuperImposed相似),从而产生要求的相位偏移。
MC_Phasing模块将保持激活状态直到被其它模块中断。
停止时使用MC_Stop。
施耐德tesys t智能马达控制器不同操作模式下输入输出点定义

过载模式:在这种模式下,Tesys T系统对电动机只保护不控制接线图(三线制):输入输出点定义:I.1可自定义I.2可自定义I.3可自定义I.4可自定义I.5故障复位I.6网络/本地控制切换O.1可自定义O.2可自定义O.3报警输出O.4故障输出如选择两线制,比三线制少一个自保持装置,也不再需要停止键,所有输入输出点定义相同独立模式:这种模式用于电动机的单向起停控制和保护接线图(三线制):输入输出点定义:I.1单向启动输入I.2控制O.2,I.2有输入时,则O.2有输出I.3可自定义I.4停止位,任何时刻I.4与C点的连接如果被断开,则电动机停止I.5故障复位I.6网络/本地控制切换O.1正向启动输出O.2由I.2控制O.3报警输出O.4故障输出如选择两线制,比三线制少一个自保持装置,也不再需要停止键;在输入输出点的I.4变为可逆模式:用于电动机的双向启停控制和保护接线图(三线制)输入输出点定义:I.1正向启动输入I.2反向启动输入I.3可自定义I.4停止位,任何时刻I.4与C点的连接如果被断开,则电动机停止I.5故障复位I.6网络/本地控制切换O.1正向启动输出O.2反向启动输出O.3报警输出O.4故障输出如选择两线制,比三线制少一个自保持装置,也不再需要停止键;在输入输出点的I.4变为双步启动模式:用于星-三角启动或自带电阻的启动接线图(三线制)星-三角自带电阻输入输出点定义:I.1单向启动输入I.2可自定义I.3可自定义I.4停止位,任何时刻I.4与C点的连接如果被断开,则电动机停止I.5故障复位I.6网络/本地控制切换O.1启动输出O.2启动输出O.3报警输出O.4故障输出双速模式:用于双速电机的启停控制和保护接线图(三线制):输入输出点定义:I.1低速启动输入I.2高速启动输入I.3可自定义I.4停止位,任何时刻I.4与C点的连接如果被断开,则电动机停止I.5故障复位I.6网络/本地控制切换O.1启动输出O.2启动输出O.3报警输出O.4故障输出自定义模式:在这种模式下,所有的点都是开放的,可以自由定义输出点定义相同出点的定义上,I.4变为可自由定义,其他相同出点的定义上,I.4变为可自由定义,其他相同。
模块接线图

施耐德模块接线图DAI74000 (16 通道)单数通道输入,公共端接电源AC220(双数通道)(9、10、19、20、29、30、39、40为空)DAI75300(32通道)输入10、20、30、40为空,公共端为9 、19、29、39(AC220 )DDI35300(9、19、29、39为公共端负极、10、20、30、40空)其余32通道接输入DC24V DDI35310中(10、20、30、40为公共端接正极、9、19、29、39空)其余32通道接输入DC24VDAO84000 16通道2个通道占用一组AC220(9、10、19、20、29、30、39、40为空)双数通道接电源,单数通道接输出。
DAO85300 32通道10、20、30、40为公共端接电源AC220其余通道接输出(9、19、29、39为空)DDO35300/DDO35310 9为公共端负极,10 为公共端正极其余通道为输入共32通道DC24VDSZ32R5 DC24V/AC220V 32通道继电器输出模块17、19、35为公共端其余通道为输出通道。
图略。
DMZ28DR DC24V 16通道输入19为空。
(0~15通道接电源正时,18接电源负)(0~15通道接电源负时,17接电源正)。
AC220V 12通道输出21、25、30、35为公共端,其余为输入。
图略。
DRA84000 16通道AC/DC(9、10、19、20.、29、30、39、40为空)双数通道接电源、单数通道接输出ACI03000 (1、2、3)(5、6、7)(11、12、13)(15、16、17)(21、22、23)(25、26、27)(31、32、33)(35、36、37)共8组通道前面2个通道接信号正、第三个接信号负其余通道为空ACI04000 16通道模拟输入单数通道接信号正、双数通道接信号负(9、10、19、20、29、30、39、40为空)。
2019施耐德控制器内部培训教程.ppt

输入阻抗
响应时间 支持的运行模式 最大输入频率 端子类型
1.96KΩ
300ns A/B相,方向+脉冲,单脉冲 100KHz 2行可插拔螺钉端子
传感二章 技术参数-PTO/PWM特征
输出供电 额定电压 供电范围 24VDC 19.2V~28.8VDC 最大输出频率
Evaluation only. eated with Aspose.Slides for .NET 3.5 Client Profile 5.2.0 Copyright 2004-2011 Aspose Pty Ltd.
I/O端子类型 采样时间 可插拔端子 10ms/通道+1扫描周期 20ms+1扫描周期 +1% 总输入传输时间 输入误差 输入精度 允许的过载电压 保护类型 极性接反 电缆长度 电缆类型 12位,包含符号位 +30VDC 输入和内部电路之间的光耦隔离 保护 最大屏蔽电缆3米 屏蔽电缆
30A@110VAC Evaluation only. 60A@240VAC eated with Aspose.Slides for .NET 3.5 是 Client Profile 5.2.0 欠压保护 瞬断 10ms@100VAC Copyright 2004-2011 Aspose Pty Ltd. 最大容量 端子块 25W 34W 3针,7.62mm端子块
兼容性
隔离
2线制/3线制传感器
光隔离 ≥15V
状态1时电压 状态1时电流 状态0时电压
输入限值
≥2.5mA ≤5V
状态0时电流
输入阻抗 响应时间 反弹滤波(可组态) 最大输入频率 3ms
≤1.0mA
4.7KΩ 300ns 0-1.5-4或12ms 100HZ
施耐德PLC编程应用案例与常见问题解决方案
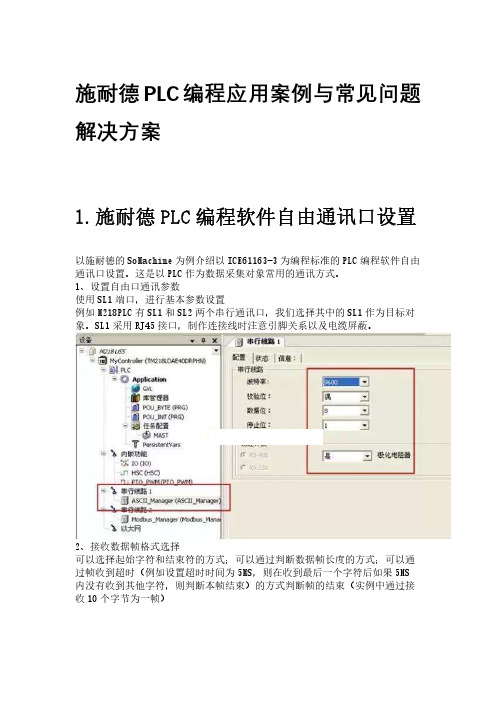
施耐德PLC编程应用案例与常见问题解决方案1.施耐德PLC编程软件自由通讯口设置以施耐德的SoMachine为例介绍以ICE61163-3为编程标准的PLC编程软件自由通讯口设置。
这是以PLC作为数据采集对象常用的通讯方式。
1、设置自由口通讯参数使用SL1端口,进行基本参数设置例如M218PLC有SL1和SL2两个串行通讯口,我们选择其中的SL1作为目标对象。
SL1采用RJ45接口,制作连接线时注意引脚关系以及电缆屏蔽。
2、接收数据帧格式选择可以选择起始字符和结束符的方式;可以通过判断数据帧长度的方式;可以通过帧收到超时(例如设置超时时间为5MS,则在收到最后一个字符后如果5MS内没有收到其他字符,则判断本帧结束)的方式判断帧的结束(实例中通过接收10个字节为一帧)ASCII管理器的配置参数介绍3、发送寄存器定义为字节的格式程序及相关数据,使用SEND_RECV_MSG功能块。
X5和X7定义为BYTE类型的数组。
(ADDM和SEND功能块说明见对应文章)4、设置发送(示例格式为16进制)X4=16#0A字节数,发送数据为X5数组里的10个字节5、设备收到的数据如下图所示,接收到的十个字节即为数组X5的十个字节6、设备发送的十个字节数据7、PLC收到的十个字节保存在接收区X7的是个寄存器中注意:如果将发送寄存器设置为INT格式,例如发送字寄存器数据16#1234,则设备收到的顺序为16#3412,即高低字节顺序问题。
2.施耐德plc%I %IW %M %MW是什么意思%I就是开关量输入,%IW就是模拟量输入,%M就是开关量输出,开关量的中间量也用%M,%MW就是模拟量输出,模拟量的中间量也用%MW。
3.施耐德PLC通讯的套路施耐德PLC通讯的套路就是三个功能块,ADDM ,READ_VAR,WRITE_VAR,下面分别介绍1 ADDMADDM功能块是地址转换,就是把PLC 的物理地址转换成PLC可识别的地址类型,这句话比较拗口,通俗讲,就是把字符串型变量,转换成ADDRESS 型变量,我们还是看例子图一 ADDM功能块如图一,图中红色圆圈内就是一个字符串型变量 '2,1' 第一个数字2表示PLC 的串口2,第二个数字1 表示读取的从站地址,也就是变频器的地址,而此功能块就是把此地址转换成ADDRESS型变量 A1_Add。
施耐德ATV21 contactor常用控制接线图
ON OFF
ON OFF
ON OFF ON OFF
出厂设置值 0 2 6 10
25
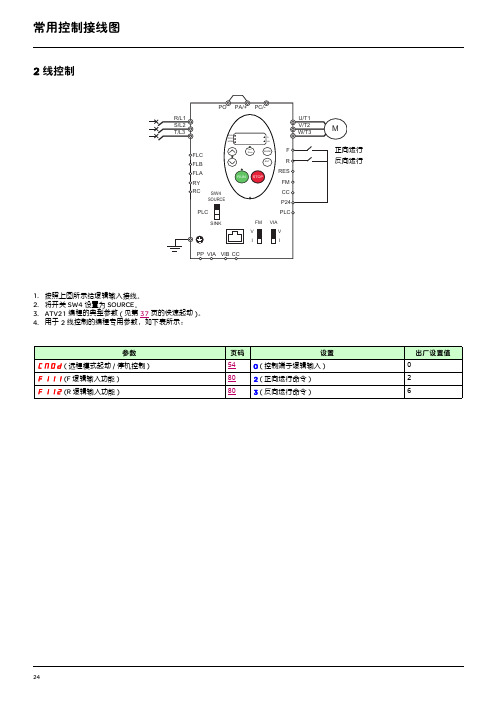
常用控制接线图
外部速度控制电位计
PO PA/+ PC/-
R/L1 S/L2 T/L3
U/T1
V/T2 W/T3
M
RUN %
PRG
MON
Hz
FLC
FLB FLA
RY RC SW4
SOURCE
Loc Rem
MODE ENT
强制本地
页码 54 54
2 ( 串行通讯 ) 4 ( 串行通讯 )
设置
R/L1 S/L2 T/L3
PO PA/+ PC/-
RUN %
PRG
MON
Hz
FLC
FLB FLA
RY RC SW4
SOURCE
Loc Rem
MODE ENT
RUN STOP
F R RES FM CC P24
PLC
PLC
SINK
FM V I
RUN STOP
F R RES FM CC P24
PLC
PLC
SINK PP VIA VIB CC
FM V I
VIA
V I SW3
2.2 至 10 kΩ - 1/4 W
1. 按照上图所示给模拟输入接线。 2. 将开关 SW3 设置为 V ( 电压 )。 3. ATV21 编程的典型参数 ( 见第 37 页的快速起动 )。 4. 用于外部速度控制电位计的编程专用参数,如下表所示:
出厂设置值 1 0 0 0%
常用控制接线图
预置速度 ( 最多为 7 个 )
PO PA/+ PC/-