《IT6000系列人机界面用户手册》
NPort 6000 系列安全终端伺服器说明书
NPort 6400/6600系列4/8/16/32埠RS-232/422/485安全終端伺服器特色與優點•LCD 顯示面板,方便設定IP 位址(標準溫度型號)•安全的Real COM 、TCP Server 、TCP Client 、Pair Connection 、Terminal 和Reverse Terminal 作業模式•支援任何傳輸率,具備高精確度•乙太網路離線時,使用連接埠緩衝區儲存串列資料•支援IPv6•以網路模組支援乙太網路備援(STP/RSTP/Turbo Ring)•在”Command-by-Command"模式下支援一般性串列指令•符合IEC 62443的資安防護功能認證簡介NPort®6000使用SSL 與SSH 通訊協定加密串列資料,並透過乙太網路傳送。
可使用相同IP 位址多達32個串列裝置連接到NPort®6000。
乙太網路連接埠可針對一般或安全的TCP/IP 連接進行設定。
NPort®6000適合在狹小空間內使用大量串列裝置的應用。
NPort®6000系列透過支援DES 、3DES 和AES 加密演算法確保數據傳輸的完整性。
任何類型的串列裝置均可連接至NPort®6600,而且NPort®6000的每個串列埠都可獨立設定為使用RS-232、RS-422或RS-485傳輸。
乙太網路連線失敗時不會遺失數據NPort®6000以客戶為導向的硬體設計確保機體可靠穩定,並可提供使用者安全的串列轉乙太網路資料傳輸。
如果乙太網路中斷,NPort®6000會將所有串列資料放入佇列,儲存至其內建的64KB 連接埠緩衝區中。
當乙太網路重新建立連線後,NPort®6000會馬上依照收到資料的順序,將緩衝區內的所有資料釋出。
使用者還可安裝SD 記憶卡來擴充連接埠緩衝區的大小。
LCD 面板使得配置變得容易NPort®6600內建LCD 面板,可設定及選取作業模式。
IT6000C系列 用户手册
环境条件 操作温度 操作湿度 存放温度 海拔高度 污染度 安装类别
要求 0℃~40℃ 20%~80%(非冷凝) -10℃~70℃ 操作海拔最高2000米 污染度2 II
版权所有 © 艾德克斯电子有限公司
III
IT6000C系列 用户手册
为了保证测量精度,建议温机半小时后开始操作。
法规标记
CE标记表示产品符合所有相关的欧洲法律规 定(如果带有年份,则表示批准此设计的年 份)。 此仪器符合WEEE指令(2002/96/EC)标记要 求,此附加产品标签说明不得将此电器/电子产 品丢弃在家庭垃圾中。
• 若需要送回ITECH公司作保固服务的产品,顾客须预付寄送到ITECH维修部
的单程运费,ITECH公司将负责支付回程运费。
• 若从其它国家送回ITECH公司做保固服务,则所有运费、关税及其它税赋均
须由顾客负担。
保证限制
保固服务不适用于因以下情况所造成的损坏:
• 顾客自行安装的电路造成的损坏,或顾客使用自己的产品造成的瑕疵; • 顾客自行修改或维修过的产品; • 顾客自行安装的电路造成的损坏或在指定的环境外操作本产品造成的损坏; • 产品型号或机身序列号被改动、删除、移除或无法辨认; • 由于事故造成的损坏,包括但不限于雷击、进水、火灾、滥用或疏忽。
“警告”标志表示有危险。它要 求在执行操作步骤时必须加以 注意,如果不正确地执行操作 或不遵守操作步骤,则可能导 致人身伤亡。在没有完全理解 指定的条件且不满足这些条件 的情况下,请勿继续执行“警 告”标志所指示的任何不当操 作。
美国政府限制性权限。授权美国 政府使用的软件和技术数据权限 仅包括那些定制提供给最终用户 的权限。ITECH 在软件和技术数 据中提供本定制商业许可时遵循 FAR 12.211(技术数据)和 12.212(计算机软件)以及用于 国防的 DFARS252.227-7015 (技术数据-商业制品)和 DFARS 227.7202-3(商业计算 机软件或计算机软件文档中的权 限)。
6000使用手册中文版
®®SWITCHINGPOWER SUPPLYAUTOMATICTEST SYSTEM6000User’s Manual (中文版)保證書致茂電子股份有限公司秉持"品質第一是責任,客戶滿意是榮譽"之信念,對所製造及銷售之產品自交貨日起一年內,保證正常使用下產生故障或損壞,負責免費修復。
保證期間內,對於下列情形之一者,本公司不負免費修復責任,本公司於修復後依維修情況酌收費用:(1)非本公司或本公司正式授權代理商直接銷售之產品。
(2)因不可抗拒之災變,或可歸責於使用者未遵照操作手冊規定使用或使用人之過失,如操作不當或其他處置造成故障或損壞。
(3)非經本公司同意,擅自拆卸修理或自行改裝或加裝附屬品,造成故障或損壞。
保證期間內,故障或損壞之維修品,使用者應負責運送到本公司或本公司指定之地點,其送達之費用由使用者負擔。
修復完畢後運交使用者(限台灣地區)或其指定地點(限台灣地區)之費用由本公司負擔。
運送期間之保險由使用者自行向保險公司投保。
致茂電子股份有限公司服務專線:(02)2298-3855轉3249傳真電話:(02)2298-3596目錄1. 系統架構 (1)1.1 簡介 (1)1.2 硬體架構 (3)1.2.1 系統控制器─個人電腦及週邊設備 (4)1.2.2 輸入電源供應器 (6)1.2.3 輸出模組─Switcher Analyzer (9)1.2.4 特殊功能模組(Extended Measurement Unit) (10)1.2.5 OVP/UVP電源供應器 (10)1.3 軟體功能 (11)2. 系統安裝 (13)2.1 安裝PowerPro軟體 (13)2.2 硬體的配線與連接 (13)2.2.1 系統的外殼 (13)2.2.2 系統的硬體組成 (14)2.2.3 系統接線及方塊圖 (15)2.2.4 硬體安裝 (16)2.3 電源與接地 (17)2.4 熱氣的排散 (17)2.5 開機前的注意事項 (18)3. 一般性操作 (18)4. 測試功能 (19)4.1 重要訊息 (19)4.2 術語 (20)4.3 各項功能測試說明 (23)4.3.1 輸出入特性測試(INPUT/OUTPUT TEST) (27)4.3.2 動態特性測試(DYNAMIC TEST) (32)4.3.3 同步動態特性測試(SYNC DYNAMIC TEST) (36)4.3.4 負載效應測試(LOAD REGULATION TEST) (37)4.3.5 交叉負載效應測試(CROSS REGULATION TEST) (41)4.3.6 電源效應測試(LINE REGULATION TEST) (42)4.3.7 混合效應測試(COMBINE REGNLATION TEST) (46)4.3.8 開機測試(TURN ON & SEQUENCE TEST) (47)4.3.9 關機測試(HOLD UP & SEQUENCE TEST) (55)4.3.10 過載保護測試(OVER LOAD PROTECTION TEST─OLP) (60)4.3.11 過功率保護測試(OVER POWER PROTECTION TEST-OPP) (65)4.3.12 在線電壓調整測試(HOLD ON ADJUST TEST) (71)4.3.13 外加波形測試(EXTERNAL WA VE TEST) (74)4.3.14 靜態測試(STATIC TEST) (74)4.3.15 附加點時序測試(EXTRA TIMING TEST) (75)4.3.16 測試環境設立功能(SET UP FUNCTION) (80)4.3.17 附加量測點測試(EXTENDED MEASUREMENT TEST) (85)4.3.18 短路測試(SHORT CIRCUIT TEST) (89)4.3.19 過電壓低電壓保護測試(OVP/UVP TEST) (95)4.3.20 總效應測試(TOTAL REGULATION TEST) (102)4.3.21 斷電測試(CYCLE DROPOUT TEST) (107)4.3.22 輸入電壓極限測試(V in RAMP TEST) (111)4.3.23 輸入頻率極限測試( F in RAMP TEST ) (115)4.3.24 輸入電源擾動測試(AC NOISE CARRY THROUGH TEST) (116)4.3.25 同步動態測試2 (SYNC DYNAMIC 2) (120)5. 錯誤或提示訊息及故障排除 (121)5.1 編輯畫面時發生的錯誤或提示訊息 (121)5.2 檔案下載或程式執行時發生的錯誤訊息 (135)1.系統架構1.1簡介Chroma 6000電源供應器自動測試系統(以下簡稱ATS)為一泛用型的電源供應器自動測試系統,可測試AC/DC及DC/DC兩種型態的電源供應器。
Kinetix 6000M IDM系统2094-SEPM-B24-S IDM电机电源接口模块说明书

Installation InstructionsKinetix 6000M Integrated Drive-Motor Power Interface ModuleCatalog Number 2094-SEPM-B24-SAbout the Integrated Drive-Motor Power Interface ModuleThe Kinetix® 6000M Integrated Drive-Motor (IDM) system uses the 2094-SEPM-B24-S IDM Power Interface Module (IPIM) to connect IDM units to 400V-class Kinetix 6000 orKinetix 6200 multi-axis drive systems. The IDM Power Interface Module occupies a single slot on Kinetix 6000 power rails.The IDM system is controlled by a real-time sercos II network. The sercos II fiber-optic cables connect to the IPIM module, which passes real time data to the IDM units by a daisy chained network cable. A network terminator is required at the last IDM unit.A hybrid cable provides a means to pass inter-module communication signals and power to each IDM unit. The network cable and hybrid cable are daisy chained from one IDM unit to another, with a terminator required at the last IDM unit (see IPIM and IDM Interconnect on page 3). Up to 16 IDM units may be daisy chained to an IPIM module (depending on load conditions). T erminator connectors for the hybrid and network connections are included with each IPIM.Mount the IPIM module on the power rail in order of decreasing power utilization. See Determining Mounting Order on page 5 for detailed information.Refer to the Kinetix 6000M Integrated Drive-Motor System User Manual, publication 2094-UM003, for detailed information on wiring, applying power, troubleshooting, and integration with ControlLogix®, CompactLogix™, or SoftLogix™ controller platforms.TopicPage Important User Information 2Catalog Number Explanation 3Before You Begin 4Install the IPIM Module 4Determining Mounting Order 5Feature and Connector Identification 8Wiring 9Dimensions 12Additional Resources132 Kinetix 6000M Integrated Drive-Motor Power Interface ModuleImportant User InformationSolid-state equipment has operational characteristics differing from those of electromechanical equipment. Safety Guidelines for the Application, Installation and Maintenance of Solid State Controls (publication SGI-1.1 available from your local Rockwell Automation® sales office or online at /literature/) describes some important differences between solid-state equipment and hard-wired electromechanical devices. Because of this difference, and also because of the wide variety of uses for solid-state equipment, all persons responsible for applying this equipment must satisfy themselves that each intended application of this equipment is acceptable.In no event will Rockwell Automation, Inc. be responsible or liable for indirect or consequential damages resulting from the use or application of this equipment.The examples and diagrams in this manual are included solely for illustrative purposes. Because of the many variables and requirements associated with any particular installation, Rockwell Automation, Inc. cannot assume responsibility or liability for actual use based on the examples and diagrams.No patent liability is assumed by Rockwell Automation, Inc. with respect to use of information, circuits, equipment, or software described in this manual.Reproduction of the contents of this manual, in whole or in part, without written permission of Rockwell Automation, Inc., is prohibited.Throughout this manual, when necessary, we use notes to make you aware of safety considerations.WARNING: Identifies information about practices or circumstances that can cause an explosion in a hazardousenvironment, which may lead to personal injury or death, property damage, or economic loss.ATTENTION: Identifies information about practices or circumstances that can lead to personal injury or death,property damage, or economic loss. Attentions help you identify a hazard, avoid a hazard and recognize theconsequences.SHOCK HAZARD: Labels may be on or inside the equipment, for example, a drive or motor, to alert people thatdangerous voltage may be present.IMPORTANT Identifies information that is critical for successful application and understanding of the product. Publication 2094-IN016A-EN-P - February 2012Kinetix 6000M Integrated Drive-Motor Power Interface Module 3Publication 2094-IN016A-EN-P - February 2012IPIM and IDM InterconnectCatalog Number ExplanationThis publication applies to the following Kinetix 6000M system component.Software and Firmware RequirementsY ou must have this version of software/firmware, which can be downloaded from: /support/downloads.htmlCat. No.Description2094-SEPM-B24-S400V-class IDM Power Interface Module with sercos interfaceProduct VersionRSLogix™ 500020.00 or later. If you are using version 20.00, you need version 1.x of the add-on profile.Kinetix 6000 1.123 or later Kinetix 62001.045 or laterxx )IPIM to IDM Hybrid Cable (2090-CHBIFS8-12AA xx )(Catalog numbers are in parenthesis.)4 Kinetix 6000M Integrated Drive-Motor Power Interface ModulePublication 2094-IN016A-EN-P - February 2012Before You BeginRemove all packing material, wedges, and braces from within and around the components. After unpacking, check the item nameplate catalog number against the purchase order.Parts ListInstall the IPIM ModuleThis procedure assumes you have prepared your panel, mounted your Bulletin 2094 power rail, and understand how to bond your system. For installation instructions regarding equipment and accessories not included here, refer to the instructions that came with those products.The Bulletin 2094 power rail comes in lengths to support one IAM module and up to seven additional modules. A maximum of four IPIM modules can be mounted to a single power rail. The connector pins for each slot are covered by a protective cover. The cover is designed to protect the pins from damage and make sure that no foreign objects lodge between the pins during installation. Refer to the Kinetix 6000 Power Rail Installation Instructions, publication 2094-IN003, when installing your power rail.Component Ships with IPIM module•Wiring plug connector set for DC bus, enable, and hybrid power/communication •Wiring plug header and motion-allowed jumper for safe-off connector • A 2090-CTHP8 hybrid terminator and 2090-CTSRP network terminator •These installation instructions, publication 2094-IN016SHOCK HAZARD: To avoid hazard of electrical shock, perform all mounting and wiring of the Bulletin 2094 power rail and drive modules prior to applying power. Once power is applied, connector terminals may have voltage present even when not in use.ATTENTION: Plan the installation of your system so that you can perform all cutting, drilling, tapping, and welding with the system removed from the enclosure. Because the system is of the open type construction, be careful to keep any metal debris from falling into it. Metal debris or other foreign matter can become lodged in the circuitry, which can result in damage to components.ATTENTION: To avoid damage to the power rail during installation, do not remove the protective covers until the module for each slot is ready for mounting.Kinetix 6000M Integrated Drive-Motor Power Interface Module 5Publication 2094-IN016A-EN-P - February 2012Determining Mounting OrderRefer to the Module Mounting Order Example diagram below and mount the modules in the order (left to right) shown. Install modules according to power utilization (highest to lowest) from left to right starting with the highest power utilization. If power utilization is unknown, position modules (highest to lowest) from left to right based on the IPIM or AM module continuous power rating (kW).Power utilization is the average power (kW) consumed by a servo axis. If the servo axis has been sized by using Motion Analyzer software, version 6.000 or later, the calculated axis power required can be used for power utilization. If the servo axis has not been sized in Motion Analyzer, the following table showing the maximum continuous power for IPIM and AM modules can be used to determine desired location on a power rail.Module Type and Continuous Power OutputThe IPIM module may be installed on a power rail with an IAM module configured as acommon bus follower, but you will be responsible for configuring the leader for the appropriate additional capacitance in the follower power rail, including the IPIM module.Module Mounting Order Example2094-BM05-S Axis Module 2094-SEPM-B24-S IPIM Module2094-BM03-S Axis Module 2094-BM02-S Axis Module 2094-BM01-S Axis Module 2094-BMP5-S Axis Module 22.0 kW15.0 kW13.5 kW6.6 kW3.9 kW1.8 kWHighest Power Utilization Lowest Power Utilization6 Kinetix 6000M Integrated Drive-Motor Power Interface ModuleIMPORTANT The IAM must be positioned in the leftmost slot of the power rail. Position your other modules to the right of the IAM module.Mount modules according to power utilization (highest to lowest) from left to right startingwith the highest power utilization. If power utilization is unknown, position modules (highestto lowest) from left to right based on continuous power rating (kW). Refer to page5.The shunt module must be installed to the right of the last module. Install only slot-fillermodules to the right of the shunt module.Do not mount the shunt module on power rails with a follower IAM module. Common busfollower IAM modules disable the internal, rail mounted, and external shunt modules.SHOCK HAZARD: To avoid personal injury due to electrical shock, place a 2094-PRF slot-fillermodule in all empty slots on the power rail. Any power rail connector without a module installedwill disable the drive system, however, control power will still be present.Mount the IPIM ModuleAll modules mount to the power rail by using the same technique.1.Remove the protective covers from the power rail connectors.2.Determine the next available slot and module for mounting.3.Inspect the module connector pins and power rail connectors and remove any foreignobjects.ATTENTION: To avoid damage to the pins located on the back of the module and tomake sure that module pins mate properly with the power rail, hang modules as shown.4.Hang the module mounting bracket from the slot on the power rail.Publication 2094-IN016A-EN-P - February 2012Kinetix 6000M Integrated Drive-Motor Power Interface Module 7Publication 2094-IN016A-EN-P - February 20125.Pivot module downward and align the guide pin on the power rail with the guide pin hole in the back of the module.6.Gently push the module against the power rail connectors and into the final mounting position.7.Tighten the mounting screws.8.Repeat the above steps for each module being installed.Guide Pin HoleRear View Side View8 Kinetix 6000M Integrated Drive-Motor Power Interface ModulePublication 2094-IN016A-EN-P - February 2012Feature and Connector IdentificationItem DescriptionItem Description ➊Hybrid cable DC bus connector➐Navigation buttons ➋Hybrid cable communication signals connector ➑Status indicators (1)(1)Refer to the Kinetix 6000M Integrated Drive-Motor System User Manual, publication 2094-UM003, for details.➌Safe-off connector ➒EtherNet/IP ports ➍Enable connector➓IDM network cable connector ➎Sercos RX and TX fiber-optic connectors Fuse holder (1)➏LCD displayHybrid cable shield clampATTENTION: To avoid damage to the sercos RX and TX connectors, use only finger-tight torque when attaching the fiber-optic cables to the modules. Do not use a wrench or any othermechanical assistance. For more information, refer to Fiber-optic Cable Installation and Handling Instructions, publication 2090-IN010.Kinetix 6000M Integrated Drive-Motor Power Interface Module 9Publication 2094-IN016A-EN-P - February 2012WiringInterconnecting the IPIM Module and IDM UnitsA hybrid cable, catalog number 2090-CHBIFS8-12AA xx, transfers DC bus power andinter-module communication signals from the IPIM module to the first IDM unit. Additional IDM units are daisy chained by using a 2090-CHBP8S8-12AA xx cable as shown in IPIM and IDM Interconnect on page 3.The IDM system network is routed by using2090-CNS x P x S-AA xx cables. A 2090-CNSSPRS-AA xx or 2090-CNSSPSS-AA xx cable is required for connection to the IPIM module.When installing network cables, torque the connector plug to 0.8…1.2 N•m (7.1…10.6 lb•in) to fully seat the contacts and secure the connection.ATTENTION: To avoid personal injury and/or equipment damage, make sure that installation complies with specifications regarding wire types, conductor sizes, branch circuit protection, and disconnect devices. The National Electrical Code (NEC) and local codes outline provisions for safely installing electrical equipment.xx or xx2090-CNSSPRS-AA xx2090-CNSSPSS-AAxx10 Kinetix 6000M Integrated Drive-Motor Power Interface ModulePublication 2094-IN016A-EN-P - February 2012Wiring the ConnectorsY ou can wire the connectors by using the following guidelines.Hybrid Cable DC Bus ConnectorThis connector supplies the DC bus voltage. Three wires from the Hybrid Power and Communication cable (catalog number 2090-CHBIFS8-12AA xx ) are used to extend this voltage to the first IDM unit.Hybrid Cable Communication Signals ConnectorThe hybrid communication connector extends control power, communication, and safety signals to the first IDM unit. The 2090-CHBIFS8-12AA xx cable interfaces with this connector.Terminal Description Signal Strip Length mm (in.)Torque N•m (lb•in)1DC Bus Supply (-)DC-DC-9.7 (0.38)0.75 (6.6)2PE Ground PE PE 3DC bus supply (+)DC+DC+Terminal Description Signal Strip Length mm (in.)Torque N•m (lb•in)1Shield–– 6.4 (0.25)0.235 (2.0)2Control Power +42V DC 42+42+3Control Power -42V DC 42-42-4CAN Bus Shield IDM CAN SHIELD SH25IDM CAN Bus Lo IDM CAN LO CN-6IDM CAN Bus Hi IDM CAN HI CN+7System OK out to IDMs IDM SYSOKOUT OUT 8System OK return from IDMs IDM SYSOKRTN RTN 9Safety Shield SAFETY SHIELD SH310Safety Enable Input 1SAFETY ENABLE 1+SE111Safety Enable Common SAFETY ENABLE-SE-12Safety Enable Input 2SAFETY ENABLE 2+SE2Kinetix 6000M Integrated Drive-Motor Power Interface Module 11Publication 2094-IN016A-EN-P - February 2012Safe-off ConnectorEach IPIM module ships with the wiring-plug header and motion-allowed jumper installed in the Safe-off Connector. With the jumper installed, the safe-off feature is not used.This connector extends the safe-off signals for use in wiring single and multiple safe-off driveconfigurations, or to jumper around (not use) the safe-off feature. Refer to the Integrated Drive-Motor System User Manual, publication 2094-UM003, for further information.Enable InputOne digital input is supplied to enable all connected IDM units. The enable status is transmitted to all of the IDM units through the CAN bus.TerminalDescriptionSignalStrip Length mm (in.)Torque N•m (lb•in)Min/Max Wire Size (1)mm 2 (AWG)(1)Maximum/minimum that the connector will accept—these are not recommendations.1Feedback Monitoring 2+FDBK2+F2+7.0 (0.275)0.235 (2.0)0.14…1.5(30…14)2Feedback Monitoring 2-FDBK2-F2-3Feedback Monitoring 1+FDBK1+F1+4Feedback Monitoring 1-FDBK1-F1-5Safety Enable Input 2SAFETY ENABLE2+SE26Safety Enable Common SAFETY ENABLE-SE-7Safety Enable Input 1SAFETY ENABLE1+SE18Safety Bypass Supply, +24V DC, 320 mA max24+24+9Safety Bypass supply, Common24V COM24-TerminalDescriptionSignalStrip Length mm (in.)Torque N•m (lb•in)Min/Max Wire Size (1)mm 2 (AWG)(1)Maximum/minimum that the connector will accept—these are not recommendations.1+24V DC Enable Supply ENABLE 24V++7.0 (0.275)0.235 (2.0)0.14…1.5(30…14)2Enable Input ENABLE INPUT EN 324V DC CommonENABLE 24V COM-12 Kinetix 6000M Integrated Drive-Motor Power Interface Module DimensionsPublication 2094-IN016A-EN-P - February 2012Kinetix 6000M Integrated Drive-Motor Power Interface Module 13Publication 2094-IN016A-EN-P - February 2012Additional ResourcesThese documents contain additional information concerning related products from Rockwell Automation.Y ou can view or download publications at /literature/. T o order paper copies of technical documentation, contact your local Allen-Bradley distributor or Rockwell Automation sales representative.ResourceDescriptionKinetix 6000M Integrated Drive-Motor User Manual, publication 2094-UM003Information on installing, configuring, startup,troubleshooting, and applications for your IDM drive system.Kinetix 6000 Multi-axis Servo Drive User Manual, publication 2094-UM001Information on installing, configuring, startup,troubleshooting, and applications for your Kinetix 6000 servo drive system.Kinetix 6200 and Kinetix 6500 Multi-axis Servo Drive User Manual, publication 2094-UM002Information on installing, configuring, startup,troubleshooting, and applications for your Kinetix 6200 or Kinetix 6500 servo drive system.Kinetix 6000 Power Rail Installation Instructions, publication 2094-IN003Information on the installation of your Bulletin 2094 Power Rail.Kinetix 6000 Shunt Module Installation Instructions, publication 2094-IN004Information on the installation of your Bulletin 2094 Shunt Module.Line Interface Module Installation Instructions, publication 2094-IN005Information on the installation and troubleshooting of your Bulletin 2094 Line Interface Module (LIM).2094 Mounting Bracket Installation Instructions, publication 2094-IN008Information on the installation of Bulletin 2094 Mounting Brackets.System Design for Control of Electrical Noise Reference Manual, publication GMC-RM001Information, examples, and techniques designed to minimize system failures caused by electrical noise.EMC Noise Management DVD, publication GMC-SP001Kinetix Safe-off Feature Safety Reference Manual, publication GMC-RM002Information on wiring and troubleshooting your Kinetix 6000 safety drive.Kinetix Rotary Motion Technical Data, publication GMC-TD001Catalog number information and specifications for Allen-Bradley rotary motors.Rockwell Automation Configuration and Selection Tools, website /en/e-tools Online product selection and system configuration tools, including AutoCAD (DXF) drawings.Rockwell Automation Product Certification, website /products/certification For declarations of conformity (DoC) currently available from Rockwell Automation.National Electrical Code, published by the National Fire Protection Association of Boston, MAAn article on wire sizes and types for grounding electrical equipment.Rockwell Automation Industrial Automation Glossary, publication AG-7.1A glossary of industrial automation terms and abbreviations.14 Kinetix 6000M Integrated Drive-Motor Power Interface Module Notes:Publication 2094-IN016A-EN-P - February 2012Kinetix 6000M Integrated Drive-Motor Power Interface Module 15 Notes:Publication 2094-IN016A-EN-P - February 2012Publication 2094-IN016A-EN-P - February 2012PN-138110Copyright © 2012 Rockwell Automation, Inc. All rights reserved. Printed in the U.S.A.Rockwell Automation SupportRockwell Automation provides technical information on the Web to assist you in using its products.At /support , you can find technical manuals, technical and application notes, sample code and links to software service packs, and a MySupport feature that you can customize to make the best use of these tools. You can also visit our Knowledgebase at /knowledgebase for FAQs, technical information, support chat and forums, software updates, and to sign up for product notification updates.For an additional level of technical phone support for installation, configuration and troubleshooting, we offer TechConnect sm support programs. For more information, contact your local distributor or Rockwell Automation representative, or visit /support/.Installation AssistanceIf you experience a problem within the first 24 hours of installation, please review the information that's contained in this manual. You can also contact a special Customer Support number for initial help in getting your product up and running.New Product Satisfaction ReturnRockwell Automation tests all of its products to ensure that they are fully operational when shipped from the manufacturing facility. However, if your product is not functioning and needs to be returned, follow these procedures.Documentation FeedbackYour comments will help us serve your documentation needs better. If you have any suggestions on how to improve this document, complete this form, publication RA-DU002, available at /literature/.United States or Canada 1.440.646.3434Outside United States or CanadaUse the Worldwide Locator at/support/americas/phone_en.html , or contact your local Rockwell Automation representative.United States Contact your distributor. You must provide a Customer Support case number (call the phone number above to obtain one) to your distributor to complete the return process.Outside United StatesPlease contact your local Rockwell Automation representative for the return procedure.Allen-Bradley, Rockwell Software, Rockwell Automation, CompactLogix, ControlLogix, Kinetix, SoftLogix, RSLogix, and T echConnect are trademarks of Rockwell Automation, Inc.Trademarks not belonging to Rockwell Automation are property of their respective companies.Roc kw ell Otomasyon Ticaret A .Ş., K ar Plaza İş Mer k ezi E B lo k K at:6 34752 İçeren köy, İstanbul, T el: +90 (216) 5698400。
6000系列 产品说明书
目录第一章系统简介 (1)1.1简介 (1)1.2系统最低配置要求 (1)1.3系统推荐配置:..................................................................... 错误!未定义书签。
1.3系统参数 (2)第二章硬件安装 (3)第三章驱动程序安装 (4)1.1、通用安装 (4)第四章系统程序安装 (15)第五章系统软件功能和操作说明 (16)一、主界面介绍 (16)1.1 基本操作 (16)1.2 屏幕显示 (17)1.3 颜色调节 (18)1.4 云台控制 (18)1.5 手动录像 (18)1.6 信息显示 (19)二、系统管理 (19)2.1 系统设置 (19)2.2 报警设置 (21)2.3 视频报警 (23)2.4 日志管理 (24)2.5 计划管理 (24)2.6 区域设置(V2.1版本此项目已经取消) (25)2.5 用户设置 (25)2.8 监看管理(V2.1版本此项目已经取消) (26)2.9 快球设置 (27)3.0 云台辅助 (27)3.1 恢复视频 (28)三、回放操作 (28)3.1 通道选择及操作信息显示 (29)3.2 操作区 (29)3.3 时间显示 (29)3.4 录像方式说明 (29)3.5 日期时间选择 (30)附录: 常见问题解答: (30)第一章系统简介1.1简介本说明书描述了与6000/8000 系列视频压缩卡(简称压缩卡)有关的硬件安装、软件安装、系统设置、软件使用等方面的内容,请务必按照说明书的指导进行这些工作,以确保监控系统正常、稳定地运行。
1.2系统最低配置要求注:1、显示器分辨率设定为1024×768或以上。
2、在系统安装完后,在控制面版中的电源选项里将关闭硬盘、关闭监视器和系统待机等选项设置为“从不”。
3、检查所有设备是否存在冲突,对于存在冲突的设备,可以通过调整中断号、内存地址或者重新安装驱动程序等方法来解决。
NS-6000系列中文操作手册
EPSON NS-6000 系列操作手冊內容第一章操作前準備第二章工具列與MMI的主視窗第三章NSTOOLPAD第四章NSMAINTEPAD第一章操作前準備1.1NS-6000(MMI)系統1.2NS-6000(MMI)桌面視窗1.3NS-6000(MMI)工具列1.4NS-6000(MMI)主視窗1.5離開NS-6000(MMI)1.1NS-6000(MMI)系統NS-6000(MMI)的軟體系統是建構在Windows95底下的,你可以使用機台右手邊的滾珠滑鼠去操作。
CPU資源不必要的浪費,當要執行其它種類的軟體時,請退出NS-6000系統。
為了要穩定操作,硬體的設定必需在NS-6000系統下的SPEL95設定編輯。
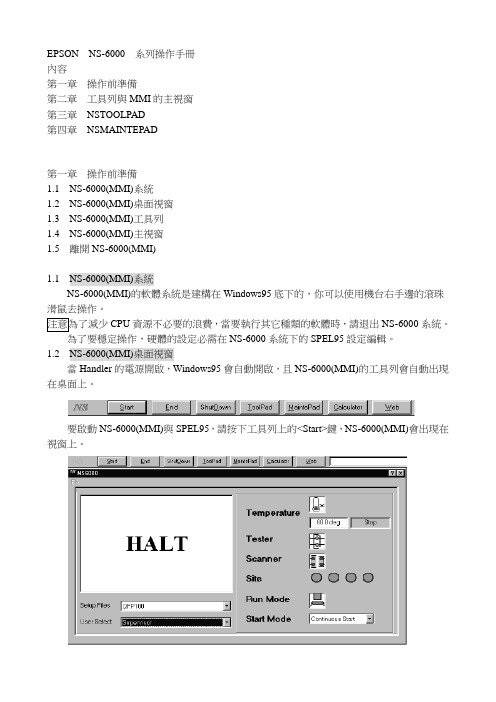
1.2NS-6000(MMI)桌面視窗當Handler的電源開啟,Windows95會自動開啟,且NS-6000(MMI)的工具列會自動出現在桌面上。
要啟動NS-6000(MMI)與SPEL95,請按下工具列上的<Start>鍵,NS-6000(MMI)會出現在視窗上。
如果要讓Counters出現在視窗的右邊,可在<ToolPad>→NSTOOLPAD→<Counter Select>圖示→[Counter Select]的介面。
(溫度顯示會出現在MMI視窗的底部)1.3NS-6000(MMI)工具列如要使用此工具列上所有的按鍵,請讓機台在HALT的狀態下(RUNNING的狀態下只有Calculator可以使用。
按鍵選擇如下:Start:開始執行NS-6000系統End:結束NS-6000系統ShutDown:關機,系統跳到可關機畫面時即可關閉電源。
ToolPad:包含Kits、加熱盤、tray盤、測試設定……等。
MaintePad:運作速度、Offset定位點調整、進階安全設定…..等。
Calculator:計算機。
Web:網路連結。
1.4NS-6000(MMI)主視窗在主視窗中,可以看到系統目前的狀態、一些基本的系統設定。
回馈式源载系统 IT6000B系列 用户手册说明书
回馈式源载系统IT6000B系列用户手册型号:IT6000B系列版本:V1.3/06,2020声明©Itech Electronic,Co.,Ltd. 2020根据国际版权法,未经Itech Electronic,Co.,Ltd.事先允许和书面同意,不得以任何形式(包括电子存储和检索或翻译为其他国家或地区语言)复制本手册中的任何内容。
手册部件号商标声明Pentium是Intel Corporation 在美国的注册商标。
Microsoft、Visual Studio、Windows和MS Windows是Microsoft Corporation在美国和/或其他国家/地区的商标。
担保本文档中包含的材料“按现状”提供,在将来版本中如有更改,恕不另行通知。
此外,在适用法律允许的最大范围内,ITECH不承诺与本手册及其包含的任何信息相关的任何明示或暗含的保证,包括但不限于对适销和适用于某种特定用途的暗含保证。
ITECH对提供、使用或应用本文档及其包含的任何信息所引起的错误或偶发或间接损失概不负责。
如ITECH与用户之间存在其他书面协议含有与本文档材料中所包含条款冲突的保证条款,以其他书面协议中的条款为准。
技术许可本文档中描述的硬件和/或软件仅在得到许可的情况下提供并且只能根据许可进行使用或复制。
限制性权限声明美国政府限制性权限。
授权美国政府使用的软件和技术数据权限仅包括那些定制提供给最终用户的权限。
ITECH在软件和技术数据中提供本定制商业许可时遵循FAR12.211(技术数据)和12.212(计算机软件)以及用于国防的DFARS252.227-7015(技术数据-商业制品)和DFARS227.7202-3(商业计算机软件或计算机软件文档中的权限)。
安全声明“小心”标志表示有危险。
它要求在执行操作步骤时必须加以注意,如果不正确地执行或不遵守操作步骤,则可能导致产品损坏或重要数据丢失。
在没有完全理解指定的条件且不满足这些条件的情况下,请勿继续执行小心标志所指示的任何不当操作。
iCAP6000系列操作手册(中文版)
3)双击样品名称,即可打开Subarray谱图(样品谱图可叠加),
察看谱峰是否有干扰,某些干扰可通过移动谱峰和背景的位置来消除干扰。需要点击更新方法。
4)通过方法→元素→谱线和级次→拟合,察看谱线的线性关系和相关系数。以确定该谱线是否可用。如果没问题,就可点击未知样图标 分析样品。
6、熄火并返回待机状态
iCAP6000系列ICP中级操作
在完全掌握初级操作的情况下,通过熟悉中级操作可以进一步了解仪器的各项功能,使你在分析过程中得心应手,游刃有余。
一、添加和创建分析谱线
二、背景及干扰元素校正
三、质量控制及极限检查
四、先进的分析功能
五、创建、拷贝、绑定分析数据库
六、优化分析条件
一、添加和创建分析谱线
在谱图中相同的谱线拥有不同的级次,因此,不仅要确定谱线的波长,还要确定谱线的级次。波长以(nm)计量,级次在波长之后的{}中。
清洗泵速和分析泵速一般设定在40-60rpm之间
RF功率通常设定为950W—1150W
雾化器压力根据需要一般设定在24—32PSI之间(6300需要手动调节)
辅助气流量一般设定为0.50 L/min,观测高度:15
《IT6000系列人机界面用户手册》
√ √ √ √ COM1(RS422/RS485) COM2(RS232) COM3(RS485) √ 电气规格
√ √ √ √ COM1(RS422/RS485) COM2(RS232) COM3(RS485) √
250mA 结构规格
300mA
一般规格
259*201
5432 1
1 2345
987 6
6 789
COM1 [RS485 2/4W] COM3 [RS485]
DB9母座(针孔型信号座)
COM2 [RS232] DB9公座(顶针型信号座)
3) DB9母座与外部设备的连接 DB9母座内置有COM1、COM3两个串行通信端口,管脚排列如下表所示:
管脚号
1 2 3 4 5 6 7 8 9
警 不要过分用力锁紧安装螺钉;如有疑问时,请向您的提供商咨询。 告
注 为保证符合IP65的密封规范,请务必确保产品包装内的安装固定螺钉被完全使用,并且安装面板的弯曲 意 度不能超过0.010°。
电气设计参考
☞ 端子说明
(7)
图4 外部接线端子分布及部件介绍
机械设计参考
☞ 安装环境 1) 本产品在0℃到50℃(32℉~122℉)的温度范围内稳定工作,超过该范围可能造成HMI器件损坏、运行异常
◆ 在使用过程中,要注意对HMI面板进行保护,使用手进行触摸操作,避免使用工具去触摸显示面板,
警
告 对外力过大造成面板损坏由用户负责;
注意 ◆ 锂电池、LCD屏、锂电池、电容器等可能含有危害健康和污染环境的成份,产品废弃时,请按工业废 弃物处理。
☞ 安全性建议
1) 在操作人员直接接触机械部分的位置,如装载和卸载机械工具的位置,或者机械自动运转的地方,必须 仔细考虑现场手动装置或其他备用手段的功能,它需要独立于可编程控制器之外,可以启动或者中断系 统的自动运行。
MTP6000系列产品附件手册说明书
ACCESSORIES BROCHUREMTP6000 SERIES ACCESSORIES SUPPORTING YOUR TEAM TODAY AND WELL INTO THE FUTURESTAY SAFE AND CONNECTED IN THE MOSTDEMANDINGSITUATIONS REMOTE SPEAKERMICROPHONESPage 6SURVEILLANCE KITSPage 8EARPIECESAND HEADSETSPage 10-15CARRY ACCESSORIESPage 16-19CHARGERSPage 20BATTERIESPage 21-23IN-VEHICLE SOLUTIONSPage 24-26MISCALLANEOUSPage 26ANTENNASPage 27IMPRES™ACCESSORIES ARE AUTOMATIC Plug in our IMPRES accessories – such as the Remote 3PEAKERÏ-ICROPHONEÏ 23- ÏnÏANDÏYOURÏRADIOÏIDENTIlESÏITÏANDÏAUTOMATICALLYÏLOADSÏTHEÏCORRECTÏPROlLEÏTOÏoptimise audio performance. What’s more, our IMPRES large-speaker RSMs match the high-powered speaker on your radio for even better communications in high-noise environments – essential when on noisy, hectic incident scenes.WHICH MICROPHONE IS RIGHT FOR ME?TALKING OUTDOORS IN DEMANDING WEATHER?If you work outdoors in demanding weather, a windporting microphone is right for you. It reduces the effect of wind and other sounds whenever you use the microphone. It also prevents water from clogging the microphone for clear transmissions.TALKING IN A CROWD OR NEAR NOISY MACHINERY?A noise-cancelling microphone is right for you. It reduces background noise to optimise audio. For clear transmission, hold the microphone directly in front of your mouth, facing the source of the noise.REMOTE SPEAKER MICROPHONESRSM ACCESSORIES FOR PMMN4113REMOTE SPEAKER MICROPHONESPMMN4099IMPRES large submersible windporting RSM withhigh/low volume toggle switch, emergency button andprogrammable buttons, 3.5mm audio jack, IP68.PMMN4080IMPRES small windporting RSM with 3.5mm audiojack and emergency button, IP54.PMMN4113IMPRES windporting RSM with 4-pole Nexus Jack,an emergency and a programmable button. This RSMincludes a front and side push-to-talk.PMMN4082IMPRES large windporting RSM with emergency andprogrammable buttons, IP57.PMLN7188Receive-only earpiece with translucentTUBEÏANDÏRUBBERÏEARTIPÏCERTIlEDÏWITHÏTHEÏPMMN4113.RMN4052Peltor Tactical-Pro medium weightheadset with boom mic and headband.GMMN4585SAVOX HC-1 Helmet-COM®unit bone-mic / single speaker.GMMN4584SAVOX HC-2 Helmet-COM®unit bone-mic / dual speaker.PMMN4081IMPRES large noise-cancelling RSM with 3.5mmaudio jack and emergency button, IP54.PMMN4024Small windporting RSM with 3.5mm audio jack, IP54.No emergency button.RSM ACCESSORIES FOR PMMN4099, PMMN4081, PMMN4080, PMMN4024MDRLN4885Receive-only foam covered earbud with coiled cord.PMLN7396Receive-only, adjustable D-styleearpiece, designed to provide a secure ANDÏCOMFORTABLEÏlTPMLN7560Receive-only earpiece with translucent tube and rubber eartip.WADN41902ECEIVE ONLYÏmEXIBLEÏEARPIECESURVEILLANCE KITS DISCREET AND CLEAR AUDIO Transmit and receive discreetly with these surveillance kits. These accessoriesfeature a streamlined design and rugged cables that withstand tough conditions.PMLN6124IMPRES 3-wire surveillance kit with translucent tube and 1 programmable button, beige.SURVEILLANCE ACCESSORYREPLACEMENT KITS FOR 2- AND 3-WIRE KITSPMLN6123, PMLN6124, PMLN6129, PMLN6130 and NNTN8459RLN6242 - Low noise kit with translucent tube and 1 clear rubber eartip.RLN6282 - Replacement standard clear rubber eartip. Pack of 50.RLN6281 - R eplacement foam plugs for RLN6242. Noise reduction = 24dB.Pack of 25 pairs.Note: for high noise kit solution combine RLN6242 low noise kit and RLN6281 replacement foam plugs.SURVEILLANCE ACCESSORYREPLACEMENT KITS FOR 1-WIRE KITS PMLN6125 and PMLN6126RLN5886 - Low noise kit with 1 clear rubber eartip.RLN5887 - High noise kit with 2 foam earplugs.PMLN61251-wire receive-only surveillance kit, black.PMLN61261-wire receive-only surveillance kit, beige.PMLN6129IMPRES 2-wire surveillance kit with translucent tube and 1 programmable button, black.NNTN84591-wire surveillance voice tube with in-line push-to-talk and microphone, black.PMLN6130IMPRES 2-wire surveillance kit with translucent tube and 1 programmable button, beige.PMLN6123IMPRES 3-wire surveillance kit with translucent tube and 1 programmable button, black.PMLN62252-wire surveillance kit with translucent tube, black.IMPRES SURVEILLANCE KIT STANDARD SURVEILLANCE KITSEARPIECES AND HEADSETSfree for daily tasks. From ultra lightweight to heavy duty, select the audio solution that’s right for you. PMLN6852Heavy duty headset, behind-the-headwith noise-cancelling boom microphoneand push-to-talk, noise reduction=24dB.PMLN7466Heavy duty headset, over-the head withnoise-cancelling boom microphone andpush-to-talk.PMLN5102Ultra lightweight headset with boommicrophone and in-line push-to-talk.PMLN5096D-style earpiece with boom microphoneand in-line push-to-talk.PMLN6634Lightweight headset, single muff withadjustable headband, boom microphoneand in-line push-to-talk.PMLN7397Receive-only voice tube, black.PMLN7512Adjustable D-style receive-only earpiece, black.PMLN7164Mag One receive-only swivel earpiece, black.PMLN5975Mag One swivel earpiece with in-line microphone and push-to-talk.PMLN5974Mag One lightweight headset with boom microphone and in-line push-to-talk.PMLN5973Mag One ear receiver with in-line microphone and push-to-talk.PMLN5979Mag One behind-the-head headset with boom microphone and in-line push-to-talk.PMLN6069Mag One earbud with in-line microphone and push-to-talk.PMLN5976Mag One earset with in-line microphone and push-to-talk.EARPIECES WITH SHORT CORDSThe following earpieces have short cords, allowing you to wear the radio on the shoulder.MAG ONE EARPIECESMAG ONE HEADSETSBONE CONDUCTION SOLUTIONSTemple transducers rest on your temple, convert audio into sound vibration and transmit it to your inner ear. If youare using hearing protection or there is loud background noise, you can hear the audio from your radio and the surrounding environment. Since the transducer sits in front of your ears, you can also wear earplugs and still hearthe radio.PMLN6624IMPRES temple transducer, boneconduction headset with boommicrophone and in-line push-to-talk(behind-the-head headband).PMLN5653Bone conduction ear microphonewith in-line large push-to-talk withprotective ring. Suitable for high noiseenvironment when ear muffs are wornover the ear microphone.TACTICAL SOLUTIONSTactical Audio Accessories are enhanced by a high speed Digital Signal Processor (DSP), which only detects the human voice. This ensures reliable transmission without clipping your message even in the noisiest ENVIRONMENTS Ï3ELECTÏFROMÏVARIOUSÏCONlGURATIONSÏTHATÏAREÏDESIGNEDÏTOÏALLOWÏYOUÏTOÏOPERATEÏTHEÏAUDIOÏaccessory with ease.PMLN6766Tactical boomless temple transducerallows the user’s ears to be uncoveredto hear surrounding environmentalsounds while using a radio. 2 bonevibration speakers for receiving, anda microphone embedded in the lefttransducer for transmitting.Requires interface modulePMLN6765 or PMLN6827.PMLN6828Tactical throat microphone picks upthe user’s voice directly from the vocalchords, making it optimal for use innoisy environments.Requires interface modulePMLN6765 or PMLN6827.PMLN6829Tactical ear microphone picks up soundthrough bone vibrations in the ear canal,giving personnel the ability to hear andspeak directly through the lightweightearpiece. The built-in bone conductionmicrophone and receiver eliminate theneed for a boom microphone.Requires interface modulePMLN6765 or PMLN6827.PMLN6830Tactical remote ring push-to-talkdesigned for users to remotely key upthe radio and customise their solution.Intended for use with interface modulePMLN6765 or PMLN6827.PMLN6765Tactical voice activated (VOX) andpush-to-talk interface module allowsusers to customise their solution.PMLN6827Tactical push-to-talk interfacemodule allows users to customise andcomplete their solution.PMLN6767Tactical remote body push-to-talkdesigned for use when wearing glovesand other heavy gear and provideshands-free operations when situationsrequire.Intended for use with interface modulePMLN6765 or PMLN6827.EARPIECES AND HEADSETSPMLN6833Tactical heavy duty temple transducerwith boom microphone. This headsetfeatures 2 bone vibration speakersfor receiving and a rugged boommicrophone for transmitting.Requires interface modulePMLN6765 or PMLN6827.NTN2572Operations critical wireless earpiece with 12” cable.Requires NNTN8191 operations critical wireless push-to-talk pod.PMLN7052Wireless 1- wire surveillance kit, black.INTEGRATED BLUETOOTH ®Our exclusive Operations Critical Wireless Accessories provide clear, reliable communication even in loud environments. An optional wireless push-to-talk pod seamlessly connects to your radio, enabling discreet transmissions when hidden in a pocket or beneath your uniform.EARPIECES AND HEADSETSPOWER SUPPLIESMUST BE ORDERED WITH NNTN8191PS000042A12 FOR EU PLUG PS000042A13 FOR UK PLUG PS000042A11 FOR US PLUGMini-USB charging plug with UK, Euro and US plugs.PMPN4007Mini-USB charging plug with Australia and New Zealand plugs.PMPN4008Mini-USB charging plug with China plug.PMPN4009Mini-USB charging plug with US plug.PMPN4015Mini-USB charging plug with Korea plug.NNTN8294Wireless Bluetooth earbud with 11.5 inch cable.Requires NNTN8191 operations critical wireless push-to-talk pod.NNTN8295Wireless Bluetooth earbud with 45 inch cable.Requires NNTN8191 operations critical wireless push-to-talk pod.NNTN8191Operations critical wireless push-to-talk pod. Power supply for charging pod must be ordered separately.Note:Supports full duplex private calls and telephone interconnect for NNTN8294, NNTN8295, NTN2572 and PMLN7052.CARRY ACCESSORIESWear your radio on the shoulder, chest or hip – it’s your decision. Our carry accessories keep your hands free so you can concentrate on the task ahead. Choose from a range of leather carry cases, straps,shoulder-wearing accessories and belt clips, all designed for easy access to your MTP6000 Series radio.PMLN56162-inch short belt clip.HLN97142.5-inch large belt clip.PMLN6252Soft leather case with 2.5-inch swivel belt loop.PMLN6250Soft leather case with 3-inch swivel belt loop.PMLN6253Hard leather case with 2.5-inch swivel belt loop.PMLN55802-inch replacement swivel belt loop.PMLN6249Hard leather case with 3-inch swivel belt loop.PMLN56113-inch replacement swivel belt loop.PMLN56102.5-inch leather swivel belt loop.PMLN5004Shoulder wearing device with Peter Jones (ILG) Klick Fast stud. Compatible with all Peter Jones (ILG) Klick Fast docks and belt loops.PMLN6251Soft leather pouch for use withshoulder wearing device (PMLN5004).Universal chest pack.Break-away chest pack with radio holder.RadioPak radio utility case.Wrist strap.NTN5243Shoulder strap, attaches to D-rings oncarry cases.CARRY ACCESSORIESGMDN0386Peter Jones (ILG) Klick Fast sew-on dock for mounting on uniforms, body armour - attaches to shoulder wearing device with stud PMLN5004.GMDN0445AAPeter Jones (ILG) Klick Fast snap-on tagdock - attaches to shoulder wearingdevice with stud PMLN5004.GMDN0445ACPeter Jones (ILG) Klick Fast belt loopwith mounting dock, low hang(50mm in width).GMDN0497Peter Jones (ILG) Klick Fast 38mm beltdock - attaches to shoulder wearingdevice with stud PMLN5004.GMDN0547Peter Jones Klick Fast leather belt loop with KlickFast Dock for 50mm belts - attaches to shoulder wearing device with stud PMLN5004.GMDN0566ACPeter Jones (ILG) Klick Fast leather beltloop and docks up to 50mm in width- attaches to shoulder wearing devicewith stud PMLN5004.GMLN4488Peter Jones (ILG) Klick Fast 50mm beltdock - attaches to shoulder wearingdevice with stud PMLN5004.WALN43070ETERÏ*ONESÏ ),' Ï+LICKÏ&ASTÏRETROÏlTTINGÏGARMENTÏWITHÏEASYÏSCREW TO lTÏDOCKÏ- attaches to shoulder wearing devicewith stud PMLN5004.PETER JONES (ILG) KLICK FAST ACCESSORIESThe Peter Jones Klick Fast System allows you to wear your radio securely in a variety of ways. The slim, durable Klick Fast Connector is compatible with all Klick Fast Docks. Simply slide the connector into any Klick Fast Dock and it locks securely into place. Once docked, your radio can be rotated to any of seven positions while remaining secure. Undocking your radio takes seconds - simply rotate the radio to the inverted positionand it slides free.CHARGERSDUAL DESKTOP CHARGER:SEQUENTIAL CHARGINGSupports sequential charging of radiolRST ÏTHENÏSPAREÏBATTERY Ï-INI 53"Ïport supports connection to IntegratedTerminal Management (iTM) softwareand download of images andlNGERPRINTSÏFROMÏ-40 Ïcamera model.NNTN8244Dual desktop charger with US plugincluded (110-240V).NNTN8245Dual desktop charger with Euro plugincluded (110-240V).NNTN8246Dual desktop charger with UK plugincluded (110-240V).DUAL DESKTOP CHARGER:SIMULTANEOUS CHARGINGSupports simultaneous charging ofradio and spare battery. Mini-USBport supports connection to iTMsoftware and download of images andlNGERPRINTSÏFROMÏ-40 Ïcamera model.PMLN6493ADual desktop charger with US plugincluded (110-240V).PMLN6494ADual desktop charger with Euro plugincluded (110-240V).PMLN6495ADual desktop charger with UK plugincluded (110-240V).MULTI-UNIT RADIO CHARGERSIncludes 6 radio charger inserts thatare compatible with all MTP6000 andMTP3000 series radio. Mini-USB portsupports connection to iTM softwareand download images from MTP6750camera model.NNTN8144Multi-unit radio charger with US plug.NNTN8145Multi-unit radio charger with Euro plug.NNTN8146Multi-unit radio charger with UK plug.SKN6371Mini USB data cable forNNTN8144/8145/8146.MULTI-UNIT BATTERY CHARGERSIncludes 6 battery charging inserts thatare compatible with all MTP6000 andMTP3000 series radios.NNTN8151Multi-unit battery charger with US plug.NNTN8152Multi-unit battery charger with Euro plug.NNTN8153Multi-unit battery charger with UK plug.NNTN6844Wall mount bracket for 6-waymulti-unit charger.BATTERIESTESTED AND PROVEN TOUGHPower your radio with the only batteries that are proven tough. Time after time, in test after test – for drop, vibration and Electrostatic Discharge (ESD) – Motorola Solutions Original batteries withstand shocks, knocks, drops and shakes to outperform the leading brands. If your radio gets banged on a ride, rattled by heavy equipment or shocked by static electricity, you can depend on our batteries to stand tough.NNTN80232150 mAh high-capacity Li-ion battery.NNTN80201650 mAh standard-capacity Li-ion battery.PERSONAL CHARGERSConveniently and quickly charge your radio.PS000042A31Personal charger with US plug (110-240V).NNTN8038Personal charger with Euro plug (110-240V).PS000042A33Personal charger with UK plug (110-240V).NNTN7560Optional multi-unit charging bracket with storage tray for programming cables.NNTN8037Battery charging insert for multi-unit charger.NNTN8036Radio charging insert for multi-unit charger.IMPRES 2SUPPORTED BY MTP6650 ONLY Your radio is your lifeline. If your battery dies, it jeopardizes everything. That’s why there’s IMPRES 2, anext-generation energy system that’s safer and smarter, while keeping you powered for even longer. With IMPRES 2, you can charge IMPRES batteries up to 1.6 times faster. Customize your charging to extend the life of batteries in storage. And manage your batteries more intelligently with enhanced diagnostics, so you get the most from each battery.IMPRES 2 batteries have been improved inside and out, so your team can tackle whatever the day brings. With higher capacity, you’ll get more talk time. With better water resistance, you’ll never think twice about submersion. And with up to 60% more charging cycles than standard LithiumIon batteries, you’ll reduce costs.PMNN4522IMPRES 2 3400 mAh Li-ion Battery.PMPN4216IMPRES 2 Multi-Unit Charger with display. Includes US/JPN power supply.PMPN4217IMPRES 2 Multi-Unit Charger with display. Includes EURO power supply.PMPN4218IMPRES 2 Multi-Unit Charger with display. Includes UK/HK power supply.IN-VEHICLE SOLUTIONS!ÏRANGEÏOFÏIN VEHICLEÏSOLUTIONSÏGIVEÏYOUÏTHEÏmEXIBILITYÏTOÏCHARGEÏANDÏENHANCEÏthe coverage area of your portable from your vehicle.PMLN6522Vehicular cradle with RF connection - radio holder only (no charging). PMLN6431Vehicular cradle with RF connection, power module and cables for radio charging - hard wired.PMLN6432Vehicular cradle with power adapter holder for radio charging. Requires vehicular power adapter NNTN8040.PMLN6433Vehicular cradle with RF connection and power adapter holder for radio charging. Requires vehicular power adapter NNTN8040.PMLN6434Vehicular cradle with power module and cables for radio charging - hard wired.NNTN8040Vehicular power adapter, 12-24V plug (cigarette lighter adapter). Lets you charge the radio in the vehicle.PMLN6521Vehicular cradle - radio holder only (no charging).IN-VEHICLE SOLUTIONS CAR KITThe MTP6000 Car Kit is designed to transform your MTP6000 series portable into a virtual mobile radio providing in-vehicle battery charging, hands-free operation and extended coverage. For more informationon these car kits, please see the TETRA MTP6000 Series Car Kit Brochure.GMAE4290Antenna for digital car kit,380 - 430MHz / GPS.GMAE4293Antenna for digital car kit, 430-470MHz / GPS.GM0301The standard car kits provides a complete in-car solution and includes the following items:• Car kit junction box• Standard cradle with RF connection • Power cable and mounting bracket • Smart visor microphone • 7.5W External Speaker • Push button, push-to-talk•Installation manual and user guideGM0302The customised car kit allows you to design a complete in-car solution tailored to your needs and includes the following standard items:• Standard items • Car kit junction box• Power cable and mounting bracket • Installation manual and user guide In addition, choose from various options to custom tailor your car kit:• Car kit cable • Cradle type• Power cable and mounting bracket • Microphone • Speaker • Antenna • Push-to-talkPMHN4210Bottom connector dust cover.PMKN4124+EYlLLÏCABLEÏFORÏ% %ÏKEYS PMKN4127Bottom connector serial data cable.PMKN4129ATETRA USB data cable.150****6001Dust cover for side connector.MISCELLANEOUS2ADIOÏANTENNAÏIDENTIlCATIONÏBANDS Ïpackage of 5: PMLN6285: BluePMLN6286: Pearl White PMLN6287: Neon Green PMLN6288: Neon Yellow PMLN6289: Neon Red85012034001Stubby antenna 350-390 MHz, 80mm.85012033001Stubby antenna 380-430 MHz, 80mm 85012056001Short stubby antenna 380-430 MHz, 55mm.PMAE4105AAntenna whip 350-470 MHz, 120mm.PMAE4106AAntenna stubby 380-430 MHz, 60mm.PMAE4107AAntenna stubby 380-430 MHz, 90mm.PMAE4103AAntenna stubby 410-470 MHz, 60mm.2ADIOÏANTENNAÏIDENTIlCATIONÏBANDS Ïpackage of 10: 32012144001: Grey 32012144002: Yellow 32012144003: Green 32012144004: Blue 32012144005: Purple85012066001Short stubby antenna 410-470 MHz, 55mm. 85012031001Whip antenna 380-430 MHz, 110mm.85012065001Whip antenna 410-470 MHz, 110mm.Supporting MTP6550 and MTP6750Supporting MTP6650 onlyANTENNASFor more information, please visit us on the web at: /MTP6000。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
COM1/COM3 串行 HMI与PLC之间的通讯端口 通讯口(DB9母座) COM2串行通讯口 HMI与PLC之间的通讯端口, (DB9公座) USB Client (Type B) USB Host (Type A) USB 通讯的 Device 端口,用于 PC 下载、调试用户程序 USB 通讯的 Host 端口,可用于 U 盘 的数据读写,可连接鼠标、打印件 等设备
3
☞ 安装方式
InoTouch系列产品支持两种安装标准:NEMA-4标准和VESA标准。
钣金面板
① 将安装螺钉卡入HMI 外壳两侧的安装固定孔
② 按此方向拧紧固定螺丝
图4 安装示意图 1) 把产品放入面板开好的安装孔中; 2) 从面板背面将4枚安装螺钉(随机附送)分别卡入产品外壳左右两侧的4个安装固定孔(如图①); 3) 逐个锁紧安装螺钉(如上图②),直到产品牢靠地固定在面板上。推荐扭力值: 6.0+/-0.5kgfcm (以达到防水效果及避免面壳等变形)。
(1) (2) (3) (4) (5) (6)
请按照本手册建议的储存温度范围内安装本产品,否则可能造成LCD屏显示故障。
后视图
配线
◆ 安装、配线等作业,请务必在切断全部电源后进行;避免带电状态进行接线、插拔电缆插头,否则容易 导致电击,或导致电路损坏; 警 ◆ 请按本手册所述,将直流电源的配线接于专用端子上; 告 危险 ◆ 在进行螺丝孔加工和接线时,勿使金属屑或电线头掉入HMI内部,以免发生故障、电子元件损坏或火 灾; ◆ 接线完成后应仔细检查,确保工作电压和接线端子的位置均正确无误。否则可能会引起火灾或事故。 为避免触电,在连接本产品的电源前,请先切断电源; ◆ 本产品的输入电源是DC24V,如果所供应的电源不在DC24V±20%内,将会严重损坏本产品,因此, 注意 请定时检查交换式电源供应器所提供的DC电源是否稳定。
运行 保养
◆ 在使用过程中,要注意对HMI面板进行保护,使用手进行触摸操作,避免使用工具去触摸显示面板,对 外力过大造成面板损坏由用户负责; ◆ 锂电池、LCD屏、锂电池、电容器等可能含有危害健康和污染环境的成份,产品废弃时,请按工业废弃 注意 物处理。
警 告
☞ IT6000安装尺寸图
厚
W
VESA安装 孔4×M4
1
2
3
4
辅助特征 T:标准配置 E:带以太网接口 屏幕尺寸 070:7寸
图3 产品尺寸图(单位:mm)
产品规格 型号 IT6070T IT6070E 显示尺寸 7.0" 7.0" 外形尺寸 长×宽×厚(mm) 200×146×42 200×146×42 NEMA-4安装 W×H (mm) 191×137 191×137 开孔尺寸建议 W+1 (mm) 192 192 H+1 (mm) 138 138
警 告 ◆
电气设计参考
☞ 端子说明
(7)
图5 外部接线端子分布及部件介绍
安装
机械设计参考
☞ 安装环境
1) 环境温度:本产品在0℃到50℃(32 ℉~122℉)的温度范围内稳定工作,超过该范围可能造成HMI器 件损坏、运行异常或性能下降。 建议使用辅助设备对现场环境温度进行调节,如低温下用加温器或 者是空调。如需在室外特定场合使用,请向您的提供商咨询; 2) 请避免在存在强烈的机械振动的环境中安装InoTouch系列HMI产品; 3) 本产品应安装在深度超过105毫米的盘柜中,四周保持至少25毫米的空间距离; 4) 在产品背后安装设备时,请确保交流电源线、PLC输出模块、接触器、启动器、继电器、变频调速 器、开关电源供应器和其它类型的电气接口设备与本产品的背面保持较远距离。此时变频调速器、 开关电源供应器输入和输出电缆都必须采用屏蔽电缆,并将屏蔽网接到系统的星形接地点; 5) InoTouch系列人机界面的前面板符合IP65的防护规定。当产品正确安装在符合IP65防护规定的盘柜 上时,盘柜依然符合IP65的规定,即当对盘柜表面喷淋液体时,液体不会渗入盘柜内部。 接口功能说明:
端子编号 (1) (2) (3) (4) (5) 端子名称 电源接口 端子功能说明 HMI的24Vdc工作电源输入端口 备注 随机附送有1个与该电源接口连接的电源端子。 内置有COM1、COM3两个串行通讯口,COM1口 具有RS485/422电平可选;COM3仅有RS485电平 IT6070E型号才带有此端口。内置有COM2串行通 讯口,RS232电平 / /
4
2) 通讯端口连接 HMI提供了2个DB9通讯端口,其中1个为DB9母座、另1个为DB9公座,(部分机型只提供了DB9母座), 内部提供了2~3个独立的串行通讯端口,可以用来连接PLC、变频器、打印机或其他智能设备等。在通讯连 接中,HMI内置有多种通信协议,常作为通讯主站使用,访问外部设备的数据。端子结构及丝印如下图,左 侧为DB9母座,右侧为DB9公座(部分机型中没有该插座),每个端口内部配置的通信端口如图中的丝印所 示: ◆ DB9公座配套通信电缆与使用设置:
1
IT 6000系列人机界面用户手册
资料编码:19010304 V0.0
感谢您购买汇川控制技术有限公司自主研发、生产的 IT6000 系列人机界 面( HMI ,以下简称 HMI )。 IT6000 系列是在 IT5000 基础上升级的新一代 HMI,采用强大的A8 内核处理器,数据处理、响应速度更快。该产品支持 使用USB或者以太网连接PC机,实现在不拔出HMI和汇川PLC通讯线的情况 下,PC穿过HMI,对PLC进行程序上传、下载、监控等操作,以简化调试工 作;支持Modbus协议、自动以高效率与PLC实现通讯;支持插入U盘对HMI 固件、画面程序、配方数据等进行更新,配合汇川PLC使用时,可更新PLC 中的程序,方便大量生产设备的程序现场下载操作。此外,该产品编程具备 离线模拟及在线模拟的功能,方便HMI程序调试与系统调试。 本手册主要描述 InoTouch 系列 HMI 的规格、特性及使用方法等。在使用本 图1 产品外观图 产品前,敬请您仔细阅读本手册,以便更清楚地掌握产品的特性,更安全 地使用本产品。关于本产品用户程序开发环境的使用及用户程序设计方法,请参考本公司发行的后台软件 “InoTouch Editor”帮助文档。软件版本请以汇川技术网站最新公布为准。
宽Dຫໍສະໝຸດ H(W+1)×(H+1)
H+1
(7)
☞ 各端口的接线说明
1) 电源连接
产品信息
☞ 命名规则
侧视图
长 后视图
IT 6 070 T
公司产品信息 汇川触摸屏 (InoTouch缩写) 产品系列号 6:6000系列
HMI采用24Vdc直流电源供电,将外部电源的正极接到‘+24V’的端子上,电源的负极接到‘GND’的端子 上;标号为 的端子为接地端,用于HMI的接地线连接,如下图:
+24V GND
图2 命名规则
※ 电源要求:本产品只能使用直流电源供电,直流电压范围是24V±20%,电源可提供的容量不小于300mA。 ※ 直流电源必须与交流主电源正确地隔离开;请勿让本产品和感性负载电路(如电磁阀)共用电源,避免电磁干扰。 ※ 24V供电电源线和通信电缆,应避免和交流电源线缆或者是电机驱动线等强干扰线缆并行走在一起。 至少保持30cm 距离; ※ 接地线的导体推荐使用一条独立的#14AWG规格导线,直接连接到系统接地点,不要经过其他电气设备的外壳或接 线端后接地,这可以保证接地导体不会承受其他支路的电流;要保证接地的导体长度尽量短。
警 ◆ 告
注 意
设计
◆ 请勿在触摸面板上设计可能导致操作员人身伤害或设备损坏的开关,请单独设计执行重要操作的开关, 否则错误输出或故障可能引发事故; 警 ◆ 请勿创建用于控制设备安全操作的触摸面板开关,如紧急停止开关。请单独设置硬件开关来执行此类操 告 作,否则可能造成严重的人身伤害或设备损坏; 注意 ◆ 请勿将本产品用作可能造成严重人身伤害、设备损坏或系统停机等重大报警的警示设备。请使用独立的 硬件与/或机械互锁来设计重要的报警指示以及它们的控制/触发设备。 ◆ 请正确安装本产品,本产品限于室内使用,请确保使用环境符合硬件规范中的限制条件(详情请参考 “基本参数:一般规格”); 警 ◆ 请勿安装于磁场过强、阳光直射、高温的场所,请勿在有易燃气体、蒸汽或者粉尘的场合使用本产品, 告 否则有爆炸危险; 危险 ◆ 请勿在可能发生温度剧烈变化或者湿度很大的环境中使用本产品,否则可能导致设备内部产生冷凝水, 导致设备损坏; ◆ 请确保所有电缆接头都牢固连接到本产品上。如果连接松动,可能会产生错误的输入或输出信号。 注意
2
☞ 基本参数
型 显示尺寸 分辨率 亮度(cd/㎡) 显示颜色 背光源 背光灯寿命 亮度调整 CPU Flash DRAM 配方存储器 SD卡接口 USB Host USB Client 以太网接口 串口 音频输出 RTC 输入电压 额定电流 外壳颜色 外壳材料 开孔尺寸(mm) 工作温度 工作湿度 存储温度 冷却方式 电磁兼容性 面板防护等级 安装方式 号 7.0" 800*480 300 24位真彩色 LED 30000hrs √ Cortex A8 600Mhz 128MB 128MB DDR3 256KB / √ √ / COM1(RS422/RS485) / √ 24VDC±20% 250mA 金属灰 ABS+PC工程塑料 192*138 一般规格 0℃~50℃ 10%~90%RH(无冷凝) -20℃~70℃ 自然风冷 CE标准 IP65 按照NEMA 4标准或者VESA标准安装 250mA 结构规格 / √ √ √ COM1(RS422/RS485)COM2(RS232) COM3(RS485) / √ 电气规格 IT6070T 硬件规格 7.0" 800*480 300 IT6070E
界面 安装 固定孔