11 雷达导航
11规则船长《航海学题库》
【单选】移向冷的下垫面气团具有的天气特征:i.气温日变化大;n.变性快;川.变性慢;w.气压高;V.气压低;w.气温日变化小。
A.川、V、WB. i、n、vD. i、n、w、【单选】根据IMO 船舶报告系统文件,船舶报告分为一般报告和特殊报告,特殊报告有:I、危险货物报告(DG , Dangerous goods report) ;n、有害物品报告(HS, Harmful substances report);川、航行计划报告(SP, Sailing plan ) ;W、船位报告(PR, Position report) ;V、变更报告(DR, Deviation report ) ;W、最终报告(FR, Final report);四、海洋污染报告(MP , Marine pollutants report );忸、其他报告( Any other report )A.I 〜WB.川〜Wc. i、n 、四、忸D. I〜忸【单选】北太平洋台风区内的最大涌区,常出现在台风前进方向的:A.右前方B.左前方C.右后方D.左后方【单选】适淹礁是指 _____A.平均大潮高潮时露出的孤立岩石B.平均大潮高潮面下,深度基准面以上的孤立岩石C.深度基准面适淹的礁石D.深度基准面以下的孤立岩石【单选】船舶在VTS 区域内航行、停泊和作业时,在下述哪些情况下需要按主管机关颁发的《VTS 用户指南》所明确的报告程序和内容,通过甚高频无线电话或其他有效手段迅速向VTS中心进行报告?I、发生交通事故;n、发生污染事故;川、发生紧急情况;w、发生船员皮肤意外受轻伤事故a.i、n、川、wb.i、n、川C.I、n、wD.I、川、wA.雷达跟踪器继续工作,但是计算目标速度发生误差B.雷达跟踪器继续工作,但是计算目标航向发生误差C.雷达正常使用,但目标跟踪功能失效D.人工输入本船航向后,雷达跟踪器才能继续工作【单选】在变性冷高压中部控制的港湾内,夜间和清晨有时会出现:A.平流雾B.锋面雾C.地形雾D.辐射雾【单选】下列说法错误的是:A.气象导航的推荐航线一定不遇大风浪B.气象导航的推荐航线并非都是大圆航法C.气象导航的推荐航线要有雾航准备D.气象导航的推荐航线仅是建议【单选】西北太平洋副热带高压的范围通常用哪种天气图上的什么线围成的区域来表示?A.地面图上副高闭合等压线B.500 hPa等压面图上588等高线C.850 hPa等压面图上152等高线D.700 hPa等压面图上588等高线【单选】如果用削尖的铅笔在海图上画一小点,其直径最小也有0.2 毫米,若某海图比例尺为1:300,000,则在该图上进行海图作业的最高精度为_________ 。
雷达与光学辅助导航系统实时数据融合研究

雷达与光学辅助导航系统实时数据融合研究导航系统在现代交通中扮演着至关重要的角色,雷达和光学辅助导航系统已成为实现精确导航的两种重要技术手段。
然而,随着技术的不断进步,如何将雷达与光学辅助导航系统的实时数据进行融合以提高导航系统的性能和准确性成为了一个研究的重要方向。
雷达作为一种无线电探测器,能够通过发射和接收电磁波来测量目标的距离和速度。
它具有良好的穿透力和距离测量能力,可以在恶劣天气条件下实现导航功能。
然而,雷达也存在一定的局限性,比如受到多径效应的影响,容易产生误判和虚警。
光学辅助导航系统采用光学传感器进行目标检测和测距,具有高分辨率和精确度的优势。
它可以获取目标的形态和颜色信息,能够提供更全面和准确的目标识别能力。
然而,光学辅助导航系统在雨雾等恶劣气象条件下性能容易受到限制。
因此,将雷达与光学辅助导航系统的实时数据进行融合已经成为越来越受关注的研究领域。
数据融合是指将多个传感器获取的数据进行整合和分析,以提供更准确、可靠的信息。
在导航系统中,雷达和光学辅助导航系统的数据融合可以通过以下几种方法实现:1. 滤波融合方法:利用滤波算法对雷达和光学辅助导航系统的数据进行滤波处理,去除噪声和误差,得到更准确和平滑的数据。
常用的滤波算法包括卡尔曼滤波和无迹卡尔曼滤波。
这种方法能够充分利用雷达和光学辅助导航系统各自的优势,提高导航系统的鲁棒性和准确性。
2. 特征融合方法:将雷达和光学辅助导航系统提取的目标特征进行融合,以获得更全面和精确的目标信息。
常用的特征包括目标的形态、颜色、纹理等。
通过融合不同传感器的特征,可以提高目标的识别率和判别性能。
例如,在车辆导航系统中,可以将雷达测量的距离和速度信息与光学传感器获取的车辆标志和交通灯等信息进行融合,以获得更准确的目标位置和道路状况。
3. 决策融合方法:利用决策理论对雷达和光学辅助导航系统的数据进行综合评估和决策。
通过建立合理的决策模型,可以根据不同传感器的权重和置信度,对导航系统的输出结果进行决策和优化。
雷达功能键基本操作

雷达功能键基本操作YM COSMOS雷達功能鍵基本操作●通則:記憶槽中上方為A槽,下方為B槽。
每5000小時或螢幕左下角之TUNE衰減則需更換磁控管。
TX A(X) (Transceiver)或TX A(S):X band 或S band。
●TRANSMIT:雷達開始發射,天線旋轉。
●INITIALISATION:最初設定之參數。
●MONITOR TEST:●OWN POSITION以游標選之,週期互換。
1.OWN POSITION (NAV):本船位置。
T:緯度。
b.LON:經度。
c.UTC XX:XX:XX W84格林威治時間,WG84:GPS系統規格。
2.WAY POINT:轉向點資料。
a.WPT nnn:轉向點編號。
b.T BRG nnn.n:到下一轉向點之真方位。
c.DTG nn.n NM:到下一轉向點之距離。
d.XTD(n) n.nn NM:航線左右限制之範圍。
e.TTG nn.nn:到下一轉向點之時間。
3.WIND AND DEPTH:風及水深之資料。
a.REL WIND:nnn KT,nnn∘REL:相對風向及風速。
b.DEPTH nnnn M:水深。
●HL:Heading Line,SL:Stern Line●中心偏移:將游標重疊於本船中心(螢幕中心),按左鍵拖曳至想要之位置後放開;按CENTRE回螢幕中心。
●CENTER上之MAX VIEN為中心偏移之最大位置。
●TUNE旁之MAN:手動,AFC(AUTO FREQUENCY):自動。
●ENH改善小目標隻回跡(特別於3nm之RANG)用於小比例尺時,會減低目標之識別能力。
●SP:短脈波,MP:中脈波,LP:長脈波。
●EVENT:記錄當時各船之位置及時間。
●BRILL:改善與設定白天及晚上之面板及螢幕之亮度。
1.DAY:白天模式。
2.NIGHT1:夜晚模式1。
a.HEADING LINE:船艏線亮度。
b.EBL/VRM:電子方位線/可變距離圈亮度。
BGT24MTR11使用手册

Infineon BGT24MTR11 24 GHZ雷达用户向导目录1引言 (2)2 概述 (2)3 VCO 压控振荡器 (2)3.1调谐电压输入 (3)3.2预分频器 (4)3.2.1 16分频器 (4)3.2.2 65536分频器 (4)4 发射机 (5)4.1 TX 端 (5)4.1.1 输出功率的使能与禁用 (6)4.1.1.1 通过SPI总线使能/禁用 (7)4.1.1.2 通过TXOFF引脚使能/禁用 (7)4.2 本振LO (7)5 接收机 (8)5.1低噪声放大器ANA (8)5.2 混频器 (9)6 传感器 (9)6.1 功率传感器 (10)6.2 温度传感器 (10)图目录图一 BGT24MTR11结构图图二 VCO频率与调谐电压VFINE=VCOARSE及温度的关系图图三三维图:输出频率与VCOARSE及VFINE的关系图图四二维图:输出电压与VCOARSE及VFINE的关系图图五 Div16的输出终端图图六不同温度下TX输出的功率与频率的关系图图七功率传感器的转换特性图图八温度传感器的转换特性图表格目录表一输出功率简表表二模拟多路复用器真值表1引言本文关于如何使用BGT24MTR11提供了一些数据手册中未作说明的补充信息。
BGT24MTR11是英飞凌公司24 GHZ雷达收发产品BGT24系列的主导产品,在此操作说明书中作为所有的BGT24产品的一个例子。
在此提及的BGT24MTR11的基本组成与BGT24MTR12、BGT24MR2的基本组成一样。
此操作说明书中的附加信息同样适用于其他产品。
2 概述下图显示了BGT24MTR11的内部结构图。
此操作说明书包括结构图的一下分节:●压控振荡器和前置分频器●发射机链,包括TX和LO输出端●接收器链,包括低噪声放大器和混频器●片上传感器3 VCO 压控振荡器BGT24MTR11的信号发生器由一个自由运行的振荡器组成,该振荡器带有两路单独的调谐电压输入端,输入端后跟一个缓冲放大器,以减少频率牵引效应。
航海学知识点汇总

航海学知识点汇总一、航海基础知识1、地球形状和地理坐标11 地球的形状和大小12 地理坐标的概念和表示方法13 经纬度的度量和换算2、航向和方位21 航向的定义和表示22 方位的概念和种类(真方位、磁方位、罗方位)23 航向和方位的换算关系3、海图31 海图的种类和用途32 海图比例尺和投影方式33 海图上的符号和注记4、航海仪器41 罗盘(磁罗经和电罗经)42 测深仪43 计程仪44 定位系统(GPS、北斗等)二、航海气象1、气象要素11 气温和气压12 风13 湿度和能见度14 云2、天气系统21 气旋和反气旋22 锋面23 台风(飓风)3、海洋气象预报31 预报的来源和获取途径32 预报内容的解读和应用三、船舶运动性能1、船舶浮性和稳性11 浮性原理12 稳性的分类和影响因素2、船舶阻力和推进21 阻力的种类和计算22 推进装置的工作原理和性能3、船舶操纵性31 操纵性指标32 影响操纵性的因素33 船舶的转向和避让四、航线设计与规划1、航线设计的原则和考虑因素11 安全因素12 经济因素13 气象和海况条件2、航线的拟定方法21 利用海图和航海资料22 参考以往的航行经验3、大圆航线和恒向线航线31 大圆航线的计算和应用32 恒向线航线的特点和使用场景五、船舶定位与导航1、天文定位11 太阳定位12 恒星定位2、陆标定位21 方位定位22 距离定位23 综合定位3、电子导航31 雷达导航32 AIS 系统的应用六、航海安全与法规1、国际海上避碰规则11 各类船舶的避让责任和行动12 号灯、号型和声号的使用2、海上交通安全法规21 船舶的适航要求22 船员的职责和资格3、应急处置31 船舶遇险的信号和报告32 火灾、碰撞等紧急情况的处理措施七、航海通信1、通信设备和方式11 甚高频(VHF)通信12 卫星通信13 莫尔斯电码通信2、通信程序和规范21 遇险通信22 日常通信的礼仪和格式八、海洋环境与保护1、海洋生态系统11 海洋生物多样性12 海洋生态平衡的重要性2、海洋污染防治21 油污、垃圾等污染物的来源和危害22 防止海洋污染的措施和法规以上是航海学的主要知识点汇总,通过对这些知识点的学习和掌握,可以为航海实践提供坚实的理论基础。
精密进近雷达通信导航监视系统ppt

• 显示器上下滑线弯曲的原因 • 显示器上航迹线弯曲的原因
精密进近雷达通信导航监视系统ppt
四、精密进近雷达在机场的配置
精密进近雷达通信导航监视系统ppt
五、精密进近雷达在进近中的应用
• 实现全雷达引导(与机场监视雷达配合)
PAR与PSR配合 • 与其他导航设备配合实现半雷达引导
精密进近雷达通信导航监视系统ppt
返回
返回 精密进近雷达通信导航监视系统ppt
返回 精密进近雷达通信导航监视系统ppt
返回 精密进近雷达通信导航监视系统ppt
相控阵着陆雷达
1、组成:
机场监视雷达(波长10cm) 相控阵着陆雷达(波长3cm) 引导指挥中心
2、特点:
引导效率高(6架飞机) 多方向着陆引导 提供多条可供选择的下滑道(2~13) 测角精度高 采用数据链,可把飞机偏差传输到飞机上; 受杂波干扰小,受雨的影响小。
精密进近雷达通信导航监视系统ppt
雷达管制移交识别的方法如下:
a.相邻的两个雷达管制席或使用同一雷达显示 器时,直接用手指出;
b.两个雷达显示屏上都标有同一地理位置或导 航设备时,利用通信设备说明航空器上述位 置的相对方位和距离,必要时,应指明航空 器的航向;
精密进近雷达通信导航监视系统ppt
c. 雷达设备有电子移交功能时,可用电 子移交标志指明,但只有在该标志仅 指明一架航空器时方可使用;
精密进近雷达通信导航监视系统ppt
(三)GCA的特点
1、优点
• 机动性好(可移动); • 机上不需增加任何设备(仅利用已有的通
信电台); • 任何飞机均可用,如何时候均可对飞机
监控; • 对场面要求不高(适应性强)
第六章 ARPA11

报警:
危险目标报警 丢失目标 目标入侵警戒圈
音响
(on/off 以手动) 可视报警;
误操作报警: 以适当的形式;
试操船
1.ARPA应能模拟本船机动(带或不带操船前的时间延迟)对 所有已跟踪目标的影响,而不中断对目标的跟踪和实际目标 字母数字数据显示的更新.在作模拟显示时,应在显示器上用 相应符号加以指示. 2.本机采用的试操船技术的原理及以本船操纵性能的模拟 (如有的话)的说明,均应包含在操作说明中. 3.应能在任何时候取消试操船.
天线 收发机 显示器 ARPA 显示器 天线 收发机
雷达/ARPA 综合显示器
组合式 ARPA 分立式 ARPA Fig. ARPA 结构
传感器 雷达 罗经
计程仪
A R PA
a b c
回波处理
显示器
d
输入接口
主CPU
e
跟踪器
ARPA 操作面板
Fig. ARPA 原理框图
6.1.2 跟踪原理 录取:手动— 用操纵杆 “Joystick” 将录取标志套在目 标上,按下录取按键 录取后, 在录取位置处设置跟踪窗,中心与回波自动重 合。由于目标位置运动状态未知和不确定,窗口要足 够大。 第一次扫描后, 包含在窗口的目标被跟踪计算出位置。 然后,第二个窗口被产生,同样.窗口要足够大。 第二次扫描后,第二个位置数据被录取。 第一个位置数据与第二个位置数据比较, 计算出航速, 可估算出第三次扫描的目标位置,作为第三个窗口的 中心。 一旦测量位置被确定,α —β 滤波器开始计算,目标 被平滑地跟踪。
第六章 ARPA
雷达
可以发现目标—亦可通过标绘得到: 方位/距离;航向/速度; CPA/TCPA
人教新课标(标准实验版)四年级下册 第11课 蝙蝠和雷达 同步测试

人教新课标(标准实验版)四年级下册第11课蝙蝠和雷达同步测试一、比一比,再组词。
(共1题;共24分)1.(24分)比一比,再组词。
竖钟超寒即荧坚针起塞既莹二、用词造句。
(共2题;共10分)2.(5分)用下面的词造句。
反复3.(5分)用下面的词造句。
证明三、根据课文内容填空。
(共2题;共16分)4.(10分)根据课文《蝙蝠和雷达》内容填空。
蝙蝠在夜间怎么飞,没见过它跟什么东西相撞,一根极细的电线,它能地避开。
5.(6分)根据课文《蝙蝠和雷达》内容填空。
科学家通过做,证明蝙蝠夜间飞行时的探路工具是,而不是。
四、选词填空。
(共1题;共8分)6.(8分)选词填空。
不是……而是即使……也能有了……就能无论……也(1)(2分)飞机上装上雷达,天空多么黑,它能安全飞行。
(2)(2分)飞机上雷达,夜间飞行保证安全。
(3)(2分)飞机在夜里安全飞行,靠飞行员眼睛,靠雷达导航。
(4)(2分)飞机上装上雷达,在漆黑的夜里,它安全飞行。
五、根据蝙蝠探路的原理图,请你画幅雷达探路的简图。
(共1题;共10分)7.(10分)读课文《蝙蝠和雷达》,根据蝙蝠探路的原理图,请你说说雷达探路的原理。
雷达:发出到发出回到六、默读课文,把课文分成三段。
在下面的内容中选择第二段的段意,用“√”表示。
(共1题;共2分)8.(2分)默读课文《蝙蝠和雷达》,选择最合适第二段的段意。
A.科学家做了三次试验。
B.科学家通过试验证明,蝙蝠夜间飞行靠的不是眼睛。
C.科学家做了三次试验,结果证明,蝙蝠夜里飞行靠的不是眼睛,而是用嘴和耳朵配合起来探路的。
七、给加点字选择正确的读音,画“√”。
(共3题;共12分)9.(4分)给下面的字选择正确的读音。
蝙蝠biān biǎn 捕捉bǔ pǔ10.(4分)给下面的字选择正确的读音。
即使jì jí 系着jì xì11.(4分)给下面的字选择正确的读音。
超声波bō pō 撞到zhuàng chuàn八、看拼音写词语。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2011-5-15
11
2)固定频率式: )固定频率式: 在雷达波段外的频率上工作,船上需专门配备接收机 专门配备接收机。 在雷达波段外的频率上工作,船上需专门配备接收机。 接收机收到信号后,经处理变成视频后送入雷达显示器, 接收机收到信号后,经处理变成视频后送入雷达显示器, 它的工作与雷达的工作无关。 它的工作与雷达的工作无关。 3.近距离、强信号会产生假回波,干扰雷达观测。 .近距离、强信号会产生假回波,干扰雷达观测。 可减弱。 用FTC可减弱。 可减弱
2011-5-15
第二节 雷达导航
一.距离避险线法 1.适用场合 . 1)航线与岸线平行或接近平行 ) 2)或参考物标与危险物连线和航线垂直或接近时 ) 2.方法 . 1)选好参考物标: )选好参考物标: 显著、 显著、不易搞错 2)定好安全距离: )定好安全距离: 根据天气情况、海面状况、 能见度、 根据天气情况、海面状况、风、流、能见度、船舶操纵性 船舶密度及船员驾驶技术等决定。 能、船舶密度及船员驾驶技术等决定。
2011-5-15
7
第三节 雷达航标 为了使浮筒、 为了使浮筒、灯船和灯塔之类的重要 物标易被雷达发现, 物标易被雷达发现,在这些导航标志 上加设各种雷达航标 一.雷达角反射器 (Radar Reflector)(P106) ( ) 1.结构:三块相互垂直的金属板或 .结构: 金属网组成 2.特点:在一个很宽的角度范围 内, .特点: 电磁波入射进入角内的能量将以完全相反的方向反射回来
2011-5-15 9
二.雷达方位信标(雷达指向标,Ramark; Radar Ramark) 雷达方位信标(雷达指向标, ) 1.有源主动雷达航标 按自己的规律,以一定的间隔发射雷达 . 按自己的规律, 信号,雷达收到后, 信号,雷达收到后,在屏上该物标的方位上显示一条径向亮 线,或1~3°的点线或扇形,指示该物标所在的方位。 °的点线或扇形,指示该物标所在的方位。
2011-5-15 15
4.用途 . 1)大大提高物标的识别能力 ) 2)提高了物标的探测距离在一般十几海里(17~30海里) )提高了物标的探测距离在一般十几海里( 海里) 海里 3)可测距离,也可测方位。 )可测距离,也可测方位。 故常常被装于海中平台、重要的海中或江、 故常常被装于海中平台、重要的海中或江、河入口处的浮 标上。比方位信标应用更加广泛。 标上。比方位信标应用更加广泛。
2011-5-15
10
2.种类: .种类: 1)扫频式:以窄频带发射,然后在雷达频带内来回扫描。 )扫频式:以窄频带发射,然后在雷达频带内来回扫描。 大多数工作在X波段 波段, 大多数工作在 波段,所有工作在该波段的雷达均能收到它 的信号。 的信号。 特点: 在荧光屏上显示径向亮线 特点 点线亮线: 点线亮线 信标扫描速率快 虚线亮线:信标扫描速率慢 虚线亮线 信标扫描速率慢
2011-5-15
4
二.方位避险法 1.适用场合 . 1)航线与岸线垂直或 ) 2)参考物标与危险物连线和航线平行时 ) 2.方法 . 1)选好参考物标: )选好参考物标: 显著、 显著、不易搞错 2)定好安全方位(真方位): )定好安全方位(真方位): 根据天气情况、海面状况、 能见度、 根据天气情况、海面状况、风、流、能见度、船舶操纵 性能、船舶密度及船员驾驶技术等决定。 性能、船舶密度及船员驾驶技术等决定。
2011-5-15
16
四.其他辅助装置 1.搜救雷达应答器(Search and .搜救雷达应答器 Rescue Radar Transponder) (SART) ) 1)是一种被动雷达应答器。接通电 )是一种被动雷达应答器。 源后,收到雷达脉冲信号后, 源后,收到雷达脉冲信号后,延时 微秒后发射至少12个短划信号 约0.5微秒后发射至少 个短划信号 微秒后发射至少 个短划信号, 长度约8海里 海里。 长度约 海里。
2011-5-15
Range 12 nm
6
三.导航注意事项 1.提前作好资料准备,设计航线(包括定好避险标 、 .提前作好资料准备,设计航线( 转向参考物标等)。 转向参考物标等)。 2.随时对照海图,辨认物标,经常定位,核实船位。 .随时对照海图,辨认物标,经常定位,核实船位。 3.要确认浮标,并应以岸标为准。 .要确认浮标,并应以岸标为准。 4.注意识别假回波、小船回波与浮标回波。 .注意识别假回波、小船回波与浮标回波。 5.利用EBL、VRM等,协助判断船位、节省时间。 .利用 、 等 协助判断船位、节省时间。
2011-5-15 3
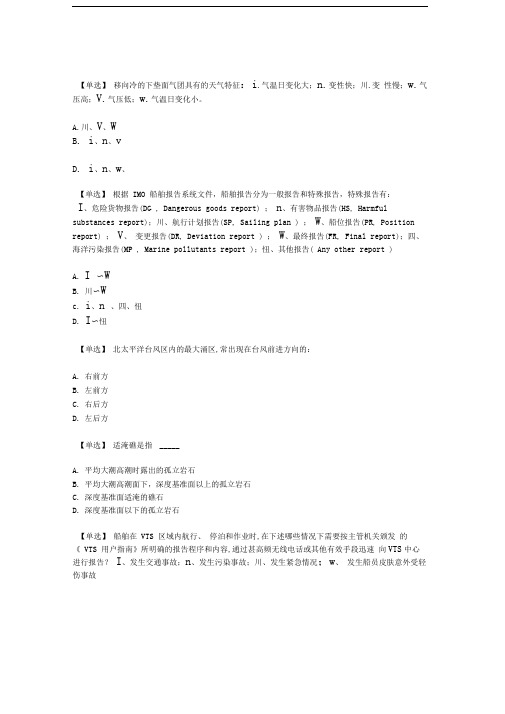
3)将方位标尺平行于船首线,将VRM定于安全距离上,找 )将方位标尺平行于船首线, 定于安全距离上, 定于安全距离上 出与VRM相切的平行线,调整船位,使参考物标回波始终处 相切的平行线, 出与 相切的平行线 调整船位, 于避险标尺线之外。 于避险标尺线之外。
5 n mile 6 5 n mile 6 n mile 5.5 n mile Range 12 nm Course Range index
2011-5-15
17
Receiver band width 9.2~9.5GHz
δt
SART signal format 7.5+1(us ) 0.4+0.1(us ) >100us <10us SART echo
2)为看清它的回波,可将雷达的本振调偏,去掉海浪、物 )为看清它的回波,可将雷达的本振调偏,去掉海浪、 标等的回波, 能显示SART的回波。但是,测定 的回波。 标等的回波,仅 能显示 的回波 但是,测定SART回 回 波之后,应尽快恢复原状态, 以观测其他物标回波。 波之后,应尽快恢复原状态, 以观测其他物标回波。
2011-5-15
13
三.雷达应答标(Racon; Radar Beacon) 雷达应答标( ) 1.有源被动雷达航标 . 通电后,在收到雷达脉冲后,延时约0.5微秒发射 该标 通电后,在收到雷达脉冲后,延时约 微秒发射 经编码的雷达脉冲信号,被雷达收到后 显示在显示屏上. 被雷达收到后,显示在显示屏上 经编码的雷达脉冲信号 被雷达收到后 显示在显示屏上 故该标又称二次雷达. 故该标又称二次雷达
2011-5-15
12
4.用途 . 1)可大大提高物标探测距离(可达20~30海里) )可大大提高物标探测距离(可达 海里) 海里 2)可提高物标的识别能力 ) 3)可用来测量物标方位,但测量距离较难。 )可用来测量物标方位,但测量距离较难。 故可用做狭水道、重要航道和港湾的导航标志, 故可用做狭水道、重要航道和港湾的导航标志, 也经常于岬角、岛屿等其他物标密集区 也经常于岬角、 及平坦的海岸线、 及平坦的海岸线、低缓难以被雷达探测和分辨的地区 标志。 作识别 标志。
2011-5-15
8
3.用途: .用途: 装有五角形角反射器的三级浮标,探测距离可从1.5提高到 装有五角形角反射器的三级浮标,探测距离可从 提高到 3.5海里 罐形 浮标、柱形浮标,可从 提高到 海里 球形浮标 海里,罐形 浮标、柱形浮标,可从3.5提高到 海里,球形浮标 提高到7海里 球形浮标, 海里 可从5海里或更远的距离上探测到 海里或更远的距离上探测到. 可从 海里或更远的距离上探测到 木质鱼船装了边长为30厘米的角反射器 探测距离可从 木质鱼船装了边长为 厘米的角反射器,探测距离可从 海里 厘米的角反射器 探测距离可从2海里 提高到6海里 救生艇装了边长为40厘米的角反射器 海里,救生艇装了边长为 厘米的角反射器,探测距离可 提高到 海里 救生艇装了边长为 厘米的角反射器 探测距离可 海里提高到7海里 从3海里提高到 海里 海里提高到 海里, 边长为0.5~1米的角反射器 相当于 米的角反射器,相当于 总吨的船舶, 边长为 米的角反射器 相当于3000~4000总吨的船舶 边长 总吨的船舶 米的角反射器,探测距离可达 海里。 为1米的角反射器 探测距离可达 米的角反射器 探测距离可达7~10海里。 海里 直径为30厘米的透镜反射器,高度为 米 雷达天线高15米 直径为 厘米的透镜反射器,高度为2米,雷达天线高 米, 厘米的透镜反射器 可达10海里 海里。 可达 海里。 缺点: 属无源雷达航标,可能与物回波相混。 缺点 属无源雷达航标,可能与物回波相混。
2011-5-15
18
2011-5-15
19
2 .增幅器(Echo Enhancers) 是一种雷达增幅器,它在收到雷达信号后 发射雷达脉冲信号,但没有编码。可增加 物标的探测距离。 3.救生火箭(Radar Life Saving Rocker;Radaflare) 用枪打上天空(约400米高)后爆炸, 发光并散发出偶极子云,雷达可在较远 的距离上发现它。
第五章 雷达定位与导航
第一节 雷达定位 一.回波的识别和物标的辩认(P104) 回波的识别和物标的辩认( ) 二:选择物标原则 选择物标原则 1.图像稳定清晰,能与海图精确对应的物标 小岛、孤立灯标等 .图像稳定清晰 能与海图精确对应的物标 小岛、 能与海图精确对应的物标(小岛 ),避免选用平坦的岸线、山坡、一些高大的建筑物等。 避免选用平坦的岸线、 避免选用平坦的岸线 山坡、一些高大的建筑物等。 2.近而可靠。 .近而可靠。 3.多物标好交角。 .多物标好交角。
2011-5-15
1
三:定位方法选择原则 1.测距定位较方位定位准。 .测距定位较方位定位准。 2.近距较远距准。 .近距较远距准。 3.多物标较单物标准。 .多物标较单物标准。 精度排序: 精度排序: 三距离( ° 三距离(120°)—— 两距离一方位—— 两距离一方位 两距离( ° 两距离(90°)—— 两方位一距离—— 两方位一距离 单物标距离方位—— 单物标距离方位 三物标方位—— 三物标方位 两物标方位。 两物标方位。 如果用罗经测方位较雷达测方位准。 如果用罗经测方位较雷达测方位准。
2011-5-15
14
2.工作频率 . 大多数工作在X波段,少数工作在 波段 波段。 大多数工作在 波段,少数工作在S波段。天线均工作在 波段 水平极化方式。 水平极化方式。 一般工作几分钟,停几分钟。所以, 一般工作几分钟,停几分钟。所以,在雷达屏上每隔一定 时间才能见到它的回答信号。 时间才能见到它的回答信号。 3.缺点 . 1)近距离、强信号,也会产生 )近距离、强信号, 假回波,干扰雷达观测。 假回波,干扰雷达观测。 2)附近有其他雷达工作时,会 )附近有其他雷达工作时, 产生工作紊乱,编码信号显示 产生工作紊乱, 位置不准。 位置不准。