路面随机激励下的汽车振动仿真分析
路面随机激励下的汽车振动仿真分析

山东交通学院学报
21 00年 9月
第l 8卷
f s
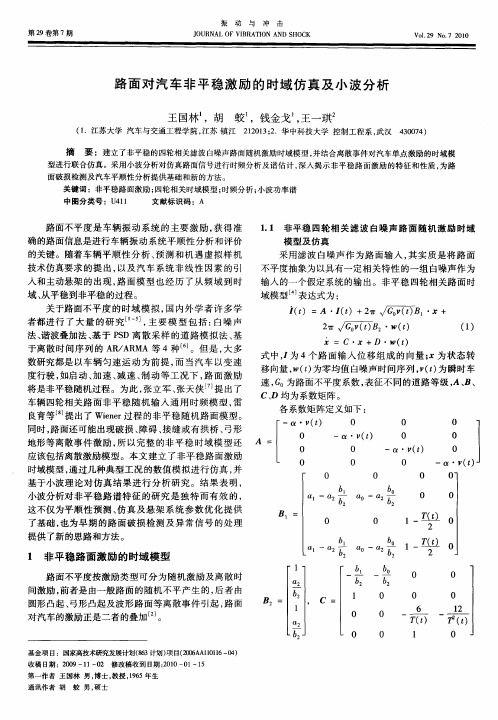
图 1 前 轮 路 面 激 励
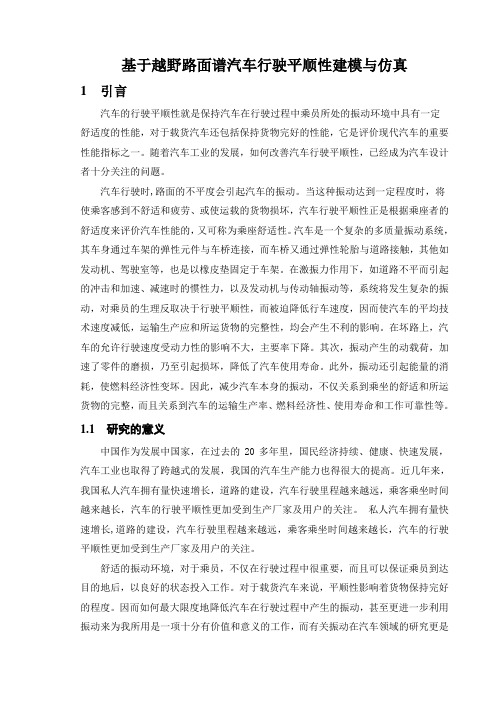
图 2 后 轮 路 面激励
图 3中,, n 为前、 / 7 h / 后轴非簧载质量 ; 为簧载总质 ” 量 ; m 为驾驶员及座椅质量 ; 为簧载质量绕其质心的转 J
动惯量 ; , 2 K 为前 、 后悬 架垂 直 刚度 ; C 为前 、 悬 架 C,: 后 阻尼 系数 ; K 前 、 轮垂 直 刚 度 ; 为 座椅 悬 架 垂 直 为 后
间序列 , 1 2即为前后 轮路 面激 励 。 图 — 12 汽车 振动 模型 . 车辆是 非 常复杂 的多 自由度 系统 , 了简化 , 以下 假设 。 为 做 1 汽车 沿 中心线 左右 对称 , ) 并作 匀速 直 线运 动 , 面是 各 向 同性 的各态 历经 随机过 程 ; 路
刚度 ; 座椅悬 架阻尼 系数 ;,q 为地 面对前 、 C为 g, 后轮 的激 励 ;,为前 、 ob 后轴 到质 心的距 离 ;q为座 椅距质 心 的距离 ; 上
为俯 仰角 ; Z为簧 载质量 质心位 移 ; ,z 为前 、 z , 后非 簧 载 质量位 移 ; 。 z 为驾驶 员 及座 椅质 量 位移 , z 分 别 为前 、 z 0 o 瞄 m£ 0 i 乏 o }∞ ∞ m 后轴簧 载质量 位移 , = —ai 0 s =一 OZ +bi n a, = s n
+6 。
— 口、臼
Z
用拉 格 朗 日方法建 立矩 阵形式 的振动 微分方 程 为
由度线性动力学平面模型 , 将车身及座椅处加速度均方根值 、 悬架动挠度及 车轮动位移作为平顺性评价 指标 , 进行 整 车振 动分析 ¨。
1 建 立模 型
车辆-路面耦合振动系统模型与仿真分析

本文 将针对 车 辆 行 走 的实 际情 况 , 车 辆 一路 面 将
系统 简化 分解为 “ 车辆 振动 简化模 型 ” “ 胎 一路 面接 、轮
触应 力模 型“ 路面 结构 力 学 响应 模 型 ” 和” 3个 子 系统 ,
建立 了车路 系 统 的垂 向 动 力分 析 模 型 , 理 论 上 研 究 从
路面不平顺对车体振动影响进行了分析。 关键 词 :车辆 ; 路面 ; 动态轮胎力 ; 振动模型 ; 仿真分析
中 图 分类 号 :U 1. 462 文 献 标 识 码 :A
近年来 , 关 车 辆 一路 面 系 统 动 力 学 问题 的研 究 有
大都 限于将 车路 系统 的动力 学 问题 分 为 “ 辆 动力 学 ” 车 和 “ 面动 力 学 ” 个 相 对 独立 的研 究 领 域 - , 路 两 - 即把
路 面结 构 , 路面结 构产 生 相 应 的力 学 响应 , 时路 面 使 同
结 构通过 轮胎 为车 辆提 供 支撑 , 影 响着 车辆 的运 行 。 并
驶 入该 路段 的最左 端 瞬 间开始 。
显然, 目前 这 些 研究 成 果 没有 考 虑 轮 胎 作 为参 振 子 系
统 对车辆 一路 面系 统 的影 响 。
动荷载作 用 下 车辆 ¨ 或 者 路 面 的 动 力 响应 。而
向位移 、 身俯 仰角位 移 ; 、: 别 为前 、 非 簧 载质 车 。z 分 后
量 的竖 向位 移 ; ( 为 路 面的竖 向位移 ; z ) 时间 t 车辆 从
车辆 一 面 系 统作 用 中 , 辆 通过 轮 胎将 荷 载 传 递 给 路 车
基 金 项 目 :福 建 省教 育 厅 科 研 基 金 资 助 项 目(B 64 ) J 0 14
路面对汽车激励的时域模型建立及计算机仿真

第11卷 第3期1998年7月中 国 公 路 学 报China Journal of Highway and T ransportVol.11 N o.3July1998路面对汽车激励的时域模型建立及计算机仿真*檀润华[河北工业大学计算中心,天津,300130] 陈 鹰[浙江大学]路甬祥[中国科学院]摘 要:应用已有幂函数功率谱的数据确定了有理函数功率谱的参数,建立了一般路面及离散事件对汽车单点及单轮辙激励的时域模型,并对该模型进行了仿真。
关键词:汽车,路面激励,数学模型,仿真中图分类号:U461The Mathematical Models in Time Domain forthe Road Disterbances and the SimulationTa n Runhua¹ Chen Ying Lu Yongxiang[¹Computat ional Cent re,Hebei U niver sity of Technology,Tianjin,300130]Abstr act:T he power spectr al densities which existed in the form of power law are used to deter mine the parameters of the power spectral densities in the r ational form.T he mathe-matical models in the time domain for the r oad disturbances which include random road disturbances and discrete event road disturbances are developed.The computer simulation for the models is also carried out.Key wor ds:Vehicle,Road disturbances,Mathematical models,Computer simulation汽车运行时,不平路面度激励使其产生振动。
基于路面随机激励的8自由度整车动力学仿真

Fu t r r rhe mo e,t e rdi o o ti — h i ng c mf r se
汽车行 驳肘 , 由路 面不 平 以及 车辆 内部 { 舒适 性等整 葺 性 能 . 面不 平 而 引起 的汽 车 I 路 路面 激励 均 一 随机 过程 , 献 [ ] 文 2 中具 体论 车单点 及单 轮 激励 的时域 模型 . 珩[] 用 j 赵 应 匀速行 驶条 件 下路 面 随机输 入 的 时域 模 型 . :
维普资讯
第 5 第 2期 卷 20 0 7年 4月
中
国
工
程
机
械
学
报
Vo _ l 5 No. 2
Ap .20 7 r 0
C N E J UR A FC N T U TIN M HhE Y HIES O N LO O S R C O AC N R
坐
性
] 自由度 及车 体仰 俯 、 车体 、 前{
F ANG o ,LIXi o b n Ha a - i ,W ANG u L ,XI Ne g g n E n - a g
( . col f ca i l n i e n ,A h i es yo chooy Manhn23 0 C ia 1 S ho h nc gn r g n n Un ri f o Me aE ei i v t Te n l , asa 4 00, hn ; g
基 于路 面 随机 激 励 的 8自 由度 整 车 动 力 学仿 真
方 浩 李晓宾2王 璐 谢 能刚 , , ,
(. 1安徽工业大学 机械工程学院 , 安徽 马鞍 山 230 ; . 4 0 0 2 马鞍山钢铁股 份有 限公 司, 安徽 马鞍 山 230 ) 4 0 0
路面对汽车非平稳激励的时域仿真及小波分析
0
bl
~ %
0
b o
~
・一
0
一
0
1 非平 稳 路 面 激 励 的 时域 模 型
1
路 面不平 度按激 励类 型 可分 为 随机 激励 及 离散 时
a2
间激励 , 前者是 由一 般路 面 的随 机不 平 产 生 的 , 者 由 后 圆形 凸起 、 弓形 凸起 及波 形路 面 等 离散 事件 引起 , 面 路
O
0
第一作者 王国林 男 , 博士 , 教授 , 6 年生 1 5 9
通讯作者 胡 蛟 男, 硕士
第 7期
1
王国林等 :路 面对 汽车非平稳激励 的时域仿真及小波分析
2 9
b ,
D =
I() 1t
0 0
O 1 2
,() 2t 1() 3t
厶() t
采 用滤 波 白噪声 作 为 路 面输 入 , 实质 是 将 路 面 其 不平 度抽象 为 以具 有一定 相 关 特性 的 一组 白噪声 作为
输入 的一个 假定 系统 的输 出 。非 平 稳 四轮 相关 路 面时 域模 型 表达式 为 :
技术仿真要求 的提出 , 以及汽车系统非线性 因素的引 入 和主动悬 架 的 出现 , 面模 型也 经 历 了从 频 域 到 时 路 域 、 平稳 到非平稳 的过 程 。 从 关于路 面不 平 度 的时 域 模 拟 , 内外 学 者 许 多 学 国 者都进 行 了大 量 的 研 究 _ , 要 模 型 包 括 : 噪 声 1 主 J 白 法 、 波叠 加法 、 于 P D离 散 采样 的道 路 模 拟法 、 谐 基 S 基 于 离散 时 间序 列 的 A / R R A MA 等 4种 。但 是 , 多 大 数研 究都是 以车 辆 匀速 运 动 为 前 提 , 当汽 车 以 变 速 而 度行 驶 , 启 动 、 速 、 速 、 动 等 工 况 下 , 面 激 励 如 加 减 制 路 将 是非平稳 随机 过程 。为此 , 张立 军 、 张天 侠 " 提 出 了
路面不平度的模拟与汽车非线性随机振动的研究报告

清华大学学报自然科学版JOURNALOF TSINGHUAUNIVERSITY SCIENCEANDTECHNOLOGY1999年第39卷第8期Vol.39 No.81999路面不平度的模拟与汽车非线性随机振动的研究*金睿臣,宋健文摘预测汽车的随机振动响应对汽车的开发设计是非常重要的。
实际汽车存在许多非线性环节,需采用非线性振动模型进行研究,在这种情况下,通常采用的频域分析方法一般不再适用。
应用机械系统分析软件ADAMS建立了11自由度汽车非线性振动模型,并用由伪白噪声法生成的符合实际路面统计特性的伪随机序列来模拟路面不平度。
在此基础上,利用数值算法在时域中对汽车的非线性随机振动响应进行了计算机仿真计算研究。
结果表明,这种方法对研究汽车的非线性随机振动是有效的。
关键词汽车动力学;ADAMS软件;非线性随机振动;路面不平度分类号U 461;O 322Simulation of the road irregularity and study of nonlinear randomvibration of the automobileJIN Ruichen,SONG JianDepartment of Automotive Engineering,State Key Laboratory of Automotive Safety and Energy Conservation,Tsinghua University,Beijing 100084,China Abstract To use the simulation technique is very important to predict the random vibration of the automobile.Because there are many nonlinear factors in a real automobile,a nonlinear vibration model should be necessarily used.In this case,the frequency domain methods can not be applicable.Under the help of the mechanical system simulation program ADAMS,an 11 DOF nonlinear vibration model of the automobile was built.By means of pseudo white noise,pseudo random sequences,which can simulate the random irregularities of a road,were generated.Based on these,using numerical method,the random vibration of the automobile was studied.The results of simulation have demonstrated the validity of the method.Key words vehicle dynamics;program ADAMS;nonlinear random vibration; road irregularities汽车以一定的速度行驶时,路面的随机不平度通过轮胎、悬架等弹性、阻尼元件传递到车身上,并通过座椅将振动传递到人体。
路面随机激励下的履带式工程车辆振动仿真

第 2 6卷第 2 期
20 0 7年 4月
工 兵 装 备 研 究
Engi e ui ne rEq pme t Re e No 2 l2 .
Apr 0 .2 07
路 面随 机 激 励 下 的 履 带 式工 程 车辆 振 动 仿 真
Ke o d :ta k d e g n e e il ;p we p c r m ;h r n c s p r o iin;v b a i n y w r s r c e n i e r v h ce o r s e t u a mo i u e p s t o i r to
SUN h ow ez, ZH AN G Qi S a— T , LIW e 一 o g。 SUN e Th n , , W i
( .En ie r g I siueo gn e r s 1 gn ei n ttt fEn ie rCop 。PI Unv fS i n A i.o c.& Te h 。Na jn 1 0 7。Chn ; c. n ig 2 0 0 ia
孙 劭 文 张 琦 李 文 鸿 孙 伟 , , ,
(. 放 军 理 工 大 学 工 程 兵 工 程 学 院 , 1解 江苏 南 京 2 0 0 ;. 南 工 业 大 学 数 理 系 , 南 郑 州 4 05 ) 1 07 2河 河 5 0 2
摘
要 :阐述 了路 面谱 的表达 形 式及应 用方 法 , 据随机道 路 的统 计量描 述 , 用谐 波 叠加 法 实现 了道路 时 根 运
Ab t a t sr c :Th x e son f r a d a plc to t od ofr d s c r e e pr s i o m n p ia in me h oa pe t um r e c i d Ac o di O t a e d s rbe . c r ng t he s a itcil t a i n ofs oc s i o d,t e ha mo c s pe po ii n me h s s d t e l e t e s a — t ts i lus r to t ha tc r a h r ni u r sto t od i u e O r a i he r e t b z
基于越野路面谱汽车行驶平顺性建模与仿真
基于越野路面谱汽车行驶平顺性建模与仿真1 引言汽车的行驶平顺性就是保持汽车在行驶过程中乘员所处的振动环境中具有一定舒适度的性能,对于载货汽车还包括保持货物完好的性能,它是评价现代汽车的重要性能指标之一。
随着汽车工业的发展,如何改善汽车行驶平顺性,已经成为汽车设计者十分关注的问题。
汽车行驶时,路面的不平度会引起汽车的振动。
当这种振动达到一定程度时,将使乘客感到不舒适和疲劳、或使运载的货物损坏,汽车行驶平顺性正是根据乘座者的舒适度来评价汽车性能的,又可称为乘座舒适性。
汽车是一个复杂的多质量振动系统,其车身通过车架的弹性元件与车桥连接,而车桥又通过弹性轮胎与道路接触,其他如发动机、驾驶室等,也是以橡皮垫固定于车架。
在激振力作用下,如道路不平而引起的冲击和加速、减速时的惯性力,以及发动机与传动轴振动等,系统将发生复杂的振动,对乘员的生理反取决于行驶平顺性,而被迫降低行车速度,因而使汽车的平均技术速度减低,运输生产应和所运货物的完整性,均会产生不利的影响。
在坏路上,汽车的允许行驶速度受动力性的影响不大,主要率下降。
其次,振动产生的动载荷,加速了零件的磨损,乃至引起损坏,降低了汽车使用寿命。
此外,振动还引起能量的消耗,使燃料经济性变坏。
因此,减少汽车本身的振动,不仅关系到乘坐的舒适和所运货物的完整,而且关系到汽车的运输生产率、燃料经济性、使用寿命和工作可靠性等。
1.1研究的意义中国作为发展中国家,在过去的20多年里,国民经济持续、健康、快速发展,汽车工业也取得了跨越式的发展,我国的汽车生产能力也得很大的提高。
近几年来,我国私人汽车拥有量快速增长,道路的建设,汽车行驶里程越来越远,乘客乘坐时间越来越长,汽车的行驶平顺性更加受到生产厂家及用户的关注。
私人汽车拥有量快速增长,道路的建设,汽车行驶里程越来越远,乘客乘坐时间越来越长,汽车的行驶平顺性更加受到生产厂家及用户的关注。
舒适的振动环境,对于乘员,不仅在行驶过程中很重要,而且可以保证乘员到达目的地后,以良好的状态投入工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图1 前轮路面激励
图2 后轮路面激励
图 3中, m , m 为前、 后轴非簧载质量; m为簧载总质 1 f 1 r m J 为簧载质量绕其质心的转 量; s为驾驶员及座椅质量; 动惯量; K , K 后悬架垂直刚度; C , C 后悬架 1 2 为前、 1 2 为前、 阻尼系数; K , K 为前、 后轮垂直刚度; K 为座椅悬架垂直 t f t r s f 刚度; C 为座椅悬架阻尼系数; q , q 后轮的激 s f f r为地面对前、 励; a , b 为前、 后轴到质心的距离; L 1 为座椅距质心的距离; 为俯仰角; Z为簧载质量质心位移; Z , Z 后非簧载 θ 1 2 为前、 质量位移; Z Z , Z 分别为前、 s为驾驶员及座椅质量位移, s f s r 后轴簧载质量位移, z z - a s i nθ - a , z z + b s i nθ ≈z θ ≈ s f= s r= z + b 。 θ 用拉格朗日方法建立矩阵形式的振动微分方程为 M Z+ C Z+ K Z= K Q , t
3 - 6 ] 基于以上假设, 建立了平面 5自由度的力学模型 [ , 如图 3所示。
收稿日期: 2 0 1 0 - 0 8 - 1 3 作者简介: 汪小朋( 1 9 8 4 —) , 男, 安徽潜山人, 合肥工业大学硕士研究生, 主要研究方向为车辆现代设计理论与方法.
8
山东交通学院学报 2 0 1 0年 9月 第 1 8卷
C 0 C - a C 0 0 1 1 1 - t f K 0 C C - b C 0 - 0 K 2 2 2 t f q f K C - C C C a C L C b C C C= C = Q= . , 0 0 1 2 1- 2- s f 1+ 1 s f- 2 s f , t q r 2 0 0 a C b C a C L C b C - a C L C - L C 1 2 1+ 1 s f- 2 2- 1 2 1 s f 0 0 0 0 C - L C - C s f 1 s f s f
2 仿真优化分析
目标函数为 m i n z ( 最小车身加速度) 与m i n z ( 最小驾驶员座椅处的振动加速度) , 即将降低车身加速 s 度和驾驶员座椅处的振动加速度的均方根值作为优化目标, 最大程度满足平顺性的要求。 1 ) 设计变量
T X= [ K , K ] . 1 2 · · · ·
第 3期 汪小朋等: 路面随机激励下的汽车振动仿真分析
9
图4 5自由度车辆振动仿真模型
2 ) 约束条件 0 . 1 0~ 0 . 3 0m , 所以前后悬架的刚度极限约束为 ①前后悬架设计的静挠度为 f c= m g / 0 . 3 0 g / 0 . 1 0 , m g / 0 . 3 0 g / 0 . 1 0 , ≤K ≤m ≤K ≤m f 1 f r 2 r 式中 m , m g 为重力加速度。 f r分别为前后悬架簧载质量; 微型轿车为了改善后座的舒适性, 常使后悬架的偏频低于前悬架偏频, 此 ②要满足汽车平顺性要求, 时有 f f , K K m / m , c 1> c 2 1/ 2> f r 式中 f , f 分别为前后悬架的静挠度。 c 1 c 2 某车模型参数见表 1 。 表1 某车模型参数
K / ( k N · m-1) K / ( k N · m-1) K ( k N · m-1) t f t r 1/ 2 0 0 a / m 1 . 3 2 0 0 b / m 1 . 5 2 4 L m 1/ 0 . 6
12 2 2 C 1/
( k N · ( s · m-1) ) ( k N · ( s · m-1) ) 1 . 5 1 . 5
汽车行驶时, 由路面不平以及发动机、 传动系和车轮等旋转部件激发汽车的振动。通常, 路面不平是 汽车振动的基本输入, 频率范围约为 0 . 5~ 2 5H z 。解决在随机不平路面激励下整车及零部件的振动问 题, 是提高汽车行驶平顺性、 安全性及零部件可靠性的重要基础。本文建立了汽车整车振动系统的 5自 由度线性动力学平面模型, 将车身及座椅处加速度均方根值、 悬架动挠度及车轮动位移作为平顺性评价
7 - 8 ] 度、 轮胎动位移等 [ 。
表2 改进前后的性能指标对比( 均方根值)
前后悬架刚度 / m K 2 40 0 0 1= 改进前 K 1 80 0 0 2= K 1 90 0 0 1= 改进后 K 1 40 0 0 2= 0 . 6 9 90 1 . 3 4 75 1 6 . 2 1 1 . 2 2 . 0 1 . 5 0 . 7 6 88 1 . 6 3 92 1 5 . 2 1 0 . 8 2 . 2 1 . 6 车身质心加速度 / ( m ·s )
后轮相对前轮路面不平度激励滞后一段时间 τ , = ( a + b ) / v , a , b 分别为质心距前后轮的距离。 τ 应用 M A T L A B / S M U L I N K进行仿真, 设定仿真时间为 3 0s , 用R u n g e K u t t a 法可以求出路面的输入时 2即为前后轮路面激励。 间序列, 图 1~ 1 . 2 汽车振动模型 车辆是非常复杂的多自由度系统, 为了简化, 做以下假设。 1 ) 汽车沿中心线左右对称, 并作匀速直线运动, 路面是各向同性的各态历经随机过程; 2 ) 忽略除路面以外的其它振源和轮胎阻尼。
·
q ( t )=- 2 f q ( t )+ 2 G v ( t ) , π π槡 ω 0 0
T 式中 q ( t ) 为前后轮路面输入的列向量, q ( t )= [ q , q ] ; ( t ) 为零均值白噪声组成的列向量, ( t )= [ w , ω ω f r 1 T - 6 3 w ] ; f f 0 . 0 6 28H z ; v 为车速, v = 2 0m/ s ; G G 5 × 1 0 m/ c y c l e 。 2 0 为下截止频率, 0= 0 为路面不平度系数, 0=
摘要: 基于某车参数建立汽车 5自由度线性振动模型, 模型中引入了后轮滞后路面随机激励, 采用 M M A T L A B / S I M U L I N K对整车振动进行仿真模拟, 将前后悬架刚度改进前后的车身和座椅处的加速度、 悬架动挠度及车轮 进而对前后悬架刚度进行优化, 从而改善车辆平顺性和乘坐舒适性, 可为车辆 动位移 4项指标进行对比分析, 平顺性设计提供参考。 关 键 词: 汽车振动; 路面激励; 悬架刚度; 仿真; M A T L A B / S I M U L I N K ; 优化 中图分类号: U 4 1 6 . 5 文献标识码: A 文章编号: 1 6 7 2 - 0 0 3 2 ( 2 0 1 0 ) 0 3 - 0 0 0 7 - 0 5
1 ] 指标, 进行整车振动分析 [ 。
1 建立模型
1 . 1 路面数学模型 汽车行驶过程中, 不同等级路面及不同行驶车速下, 路面不平度激励有所不同。路面模型是路面不 平度激励随路面等级及车速变化的数学描述。建立的汽车 5自由度平面模型, 考虑了后轮滞后路面不平 度输入, 没有考虑左右轮相干的路面输入。 根据文献[ 2 ] 的研究结果, 生成随机路面不平度轮廓的方法是让白噪声通过一成形滤波器, 车轮所 受到的路面随机激励数学模型为
根据表 1的参数对前后悬架刚度进行改进, 改进前后仿真对比分析, 仿真时间为 3 0s , 求解方法为 v a r i a b l e s t e p , o d e 4 5 , 其余采用默认值, 模拟结果对比见图 5~ 1 0 。
图5 车身质心加速度对比图
1 0
山东交通学院学报 2 0 1 0年 9月 第 1 8卷
图6 座椅处加速度对比图
图7 前轴悬架动挠度对比图
图8 后轴悬架动挠度对比图
图9 前轮胎动位移对比图
第 3期 汪小朋等: 路面随机激励下的汽车振动仿真分析
1 1
图1 0 后轮胎动位移比图
为了让优化前后结果更清晰, 表 2列出了改进前后车辆的性能指标, 如加速度均方根值、 悬架动挠
[ ]
为了方便计算和仿真, 有必要将方程( 1 ) 转化为状态方程的形式, 两边同乘以 M-1, 并整理得
· ·
Z=- M -1C Z- M -1K Z+ M -1K Q . t
·
7 ] 运用 M A T L A B / S I M U L I N K建立 5自由度车辆振动仿真模型, 如图 4所示 [ 。
T · · ·
( 1 )
图3 汽车 5自由度力学模型
式中 Z为输出向量, Z=[ z , z , z , , Z ]; M 为质量矩 φ 1 2 s K为刚度矩阵; C为阻尼矩阵; K Q为激励向量。M, K , C , K , Q分别为 阵; t为激励矩阵, t
1 f m K 0 K - a K 0 K t f- 1 1 1 - m 1 r 0 - K K K - b K 0 t r- 2 2 2 , M = m , K = K K - K K K a K L K b K K 1 2 1- 2- s f 1+ 1 s f- 2 s f J 2 2 2 - a K b K a K L K b K - a b K b K L K - L K 1 2 1+ 1 s f- 2 1- 2- s f 1 s f 1 m s
- 2
座椅加速度 /
- 2 ( m ·s )
前悬架动挠度 / m m
后悬架动挠度 / m m
前轮胎动位移 / m m
后轮胎动位移 / m m
由表 2可以看出, 在尽量不影响悬架动行程、 轮胎动位移的前提条件下, 改进后, 车身加速度、 座椅处 加速度均方根值均明显减小, 车辆平顺性和乘坐舒适性有所改善。
D O I : 1 0 . 3 9 6 9 / j . i s s n . 1 6 7 2 - 0 0 3 2 . 2 0 1 0 . 0 3 . 0 0 2