机械控制工程基础期末试卷_答案2
2机械控制工程基础第二章答案.pdf

2.5 输出 y(t)与输入 x(t)的关系为 y(t)= 2x(t)+0.5 x3 (t)。 (1)求当工作点为 xo =0, xo =1, xo =2 时相应的稳态时输出值;
(2)在这些工作点处作小偏差线性化模型,并以对工作的偏差来定
义 x 和 y,写出新的线性化模型。
若令
K1=
(F xv
)(| xvo,
po),
K
2
=
(
F p
)(| xvo, po),
Q =K1 • xv + K 2 • p
将上式改写为增量方程的形式
Q =K1 • xv + K 2 • p
2.7 已 知 系 统 的 动 力 学 方 程 如 下 , 试 写 出 它 们 的 传 递 函 数
Y(s)/R(s)。
负载效应。
图(题 2.2) 解: (1)对图(a)所示系统,由牛顿定律有
1
一寸光阴不可轻
c1( xi − xo) − c2 xo = mxo
即
mxo + ( c1+ c2)xo = c1 xi
(2)对图(b)所示系统,引入一中间变量 x,并由牛顿定律有
(x −x)k =c(x−x )
i
1
o
c(
x
−
图(题 2.3)
解:(1)对图(a)所示系统,设i1 为流过 R1 的电流,i 为总电流,则有
u
o
=
R2
i
+
1 C
2
idt
ui −uo=R1i1
2
一寸光阴不可轻
ui
−uo
=
1 C
(完整版)机械工程控制期末考试试题和标准答案及评分标准模板
《机械工程控制基础》试题(A 卷)(考试时间:120分钟)一、单项选择题(共10分,每小题2分)1.控制系统中,下列元件通常属于反馈元件的是________ 。
A .电压放大器;B .热电偶;C .液压马达; D .电动机;2.某系统的传递函数是)1)(1()5.0()(2++++=s s s s s G ,其中没有________ 环节。
A .比例环节;B .惯性环节;C .积分环节;D .一阶微分环节;3.二阶系统的时域性能指标上升时间r t 、峰值时间p t 、调整时间s t 、最大超调量p M 和振荡次数N ,反应系统稳定性的是________ 。
A .r t 、p M ;B . p t 、s t ;C .r t 、N ;D .p M 、N ; 4.某放大器的传递函数)1()(+=Ts K s G ,当s rad /1=ω,相频为45-,则T 的值为________。
A .1;B .2;C .3; D. 4;5. PID 校正是针对___________进行比例、积分和微分运算后形成的控制规律。
A .输入信号)(t x i ;B .输出信号)(0t x ;C .误差信号)(t e ;D .偏差信号)(t ε;二、填空题(共20分,每空2分)6.1954年,我国科学家_____________发表了《工程控制论》,奠定了控制工程的理论基础。
7.对于受干扰的闭环系统,如果系统只受输入)(t x i 作用时的输出是)(01t x ,系统只受干扰)(t n 作用时的输出是)(02t x ,则系统同时受)(t x i 和)(t n 作用时的输出=)(0t x _______________。
8.如图所示的信号流图,前向通道的传递函数为_________,反馈通道有_________条,系统的传递函数为_________。
(X i )(0s 题8图9. 已知单位反馈系统的开环传递函数为)12(5)(+=s s s G ,则系统单位阶跃和单位速度输入时的稳态误差分别为________、_________ 。
机械工程控制基础 自动控制原理 期末考试题目 带答案
第一章1. 闭环控制系统中的反馈作用()A.依输入信号的大小而存在B.不一定存在C.必然存在D.一定不存在闭环系统一定存在反馈作用。
闭环的作用是(进行偏差控制)负反馈是将输出量引回输入端,与输入信号比较,比较的结果称为偏差。
系统的输出信号对控制作用的影响(闭环有)关于反馈的说法正确的是( D )A.反馈实质上就是信号的并联B.反馈就是输入信号与反馈信号相加C.反馈都是人为加入的D.反馈是输出以不同的方式对系统作用对于系统的抗干扰能力()A.开环强 B. 闭环强 C. 都强 D. 都不强关于闭环控制的不正确说法是()A.输入与输出信号只有顺向传递,没有反向联系B.输入与输出信号既有顺向传递,又有反向联系C.闭环控制精度高,抗干扰性好D.闭环控制引入反馈,参数选择不当不易稳定2.控制系统是由控制器和被控对象组成。
控制系统所要操纵的对象称为被控对象。
3.作为系统开环不振荡。
开环控制系统的控制信号取决于()A.系统的实际输出。
B.系统的实际输出与理想输出之差C.输入与输出之差D.输入4.如果系统的被控量随着输入量的变化而变化,则称为随动系统5.负反馈控制原理是将输出信号引回输入端,与输入信号比较,利用所得的偏差信号进行控制,使偏差减小或消除。
6. 某系统的微分方程为.3()()()()o o o ix t x t x t x t-+=,则它是非线性系统。
系统的动态方程为...2()()()()x t x t x t y t++=,则该系统为非线性系统。
7.以下几个微分方程表示的系统中,属于线性定常系统的是...222 o o o i x x x x ++=某系统的微分方程为...33()2()()()o o o ix t x t x t x t-+=,则它是(D )A.线性定常系统B.线性系统C .非线性时变系统D .非线性系统系统的动态方程为'''()4()3()()x t x t x t y t ++=,则该系统为 线性 系统。
(完整版)大工《机械工程控制基础》期末考试复习题
(完整版)⼤⼯《机械⼯程控制基础》期末考试复习题⼤⼯2018年春《机械⼯程控制基础》期末考试复习题⼀、单项选择题(本⼤题共40⼩题,每⼩题2分,共80分)1、当⼆阶系统传递函数的极点分布在s 平⾯的虚轴上时,系统的阻尼⽐ζ为()。
A .ζ<0 B .ζ=0 C .0<ζ<1 D .ζ≧12、已知函数1()()s F s s s a +=+,则()f t 的终值()f ∞=()。
A .0B .∞C .aD .1/a3、某系统的传递函数2100()12100G s s s =++,则⽆阻尼⾃然频率n ω等于()。
A .10rad/sB .0.1rad/sC .1rad/sD .0.01rad/s 4、作为⼀个控制系统,⼀般来说()。
A .开环不振荡B .闭环不振荡C .开环⼀定振荡D .闭环⼀定振荡5、系统不稳定时,其稳态误差为()。
A .+∞B .-∞C .0D .以上都不对6、⼀阶单位反馈系统的开环传递函数为G s Ks s K ()()=+,则该系统稳定的K 值范围为()。
A .K >0B .K >1C .0<K <10D .K >-17、某⼀系统的稳态加速度误差为⼀常数,则该系统为()系统。
A .0型B .I 型C .Ⅱ型D .以上选项都不对8、以下关于系统稳态偏差的说法正确的是()。
A .稳态偏差只取决于系统的结构和参数B .稳态偏差只取决于系统输⼊和⼲扰C .稳态偏差与系统结构、参数、输⼊和⼲扰等有关D .系统稳态偏差为09、在直流电动机的电枢回路中,以电流为输出,电压为输⼊,两者之间的传递函数是()。
A .⽐例环节 B .积分环节 C .惯性环节 D .微分环节 10、⾃动控制系统的反馈环节中必须具有()。
A .给定元件B .检测元件C .放⼤元件D .执⾏元件 11、在阶跃函数输⼊作⽤下,阻尼⽐()的⼆阶系统,其响应具有减幅振荡特性。
A .ζ=0 B .ζ>1 C .ζ=1 D .0<ζ<1 12、⼀阶系统的传递函数为G s KTs ()=+1,则该系统时间响应的快速性()。
机械基础期末考试卷和答案
机械基础期末考试卷和答案一、单选题(每题只有一个最佳答案,每题2分,共 20分。
)1、在机械中属于制造单元的是()。
[单选题] *A.构件B.零件(正确答案)C.部件D.焊接件2、汽车雨刮器机构属于()机构。
[单选题] *A.曲柄摇杆机构(正确答案)B.双摇杆机构C. 双曲柄机构D.曲柄滑块机构3、当机构的自由度F大于零且等于原动件数目时,机构() [单选题] *A.具有确定运动(正确答案)B.运动不确定C. 构件被破坏D.不能组成机构4、急回特性跟()有关 [单选题] *A.压力角B.传动角C. 极位夹角(正确答案)5、凸轮机构从动件运动规律中产生刚性冲击的是() [单选题] *A.等速运动(正确答案)B.等加速等减速运动C.简谐运动D.正弦加速度运动6、螺纹的基本参数中,公称直径是() [单选题] *A.大径(正确答案)B.小径C.中径D.内径7、带传动常用的张紧方法是() [单选题] *A.调节中心距(正确答案)B.增大传动比C.减小传动比D.增加带长8、带传动中紧边拉力和松边拉力之差叫做() [单选题] *A.拉力差B.拉应力C.有效圆周力(正确答案)D.摩擦力9、行星轮系中轴线转动的的构件叫() [单选题] *A.行星轮(正确答案)C.行星架D.中心轮10、轴承代号为30220,表示轴承内径为()毫米 [单选题] *A.80B.100(正确答案)C.120D.140二、填空题(每空1分,共10分)1、平面机构中若引入一个高副将带入的约束数是________。
2、_________是机器和机构的统称。
3、齿轮的渐开线齿廓形状取决于_________。
4、轮系分为______轮系、______轮系和______轮系。
5、______是在齿顶圆和齿根圆之间的一个假想基准圆。
6、轴上与轴承配合的部分称为______。
7、标准直齿圆柱齿轮不根切的最少齿数是______。
8、平键连接的主要工作面是______。
机械工程控制基础期末试卷+答案 ()

一. 填空题(每小题2.5分,共25分)1. 对控制系统的基本要求一般可以归纳为稳定性、 和 。
2. 按系统有无反馈,通常可将控制系统分为 和 。
3. 在控制工程基础课程中描述系统的数学模型有 、 等。
4. 反映出稳态响应偏离系统希望值的程度,它用来衡量系统 的程度。
5. 一阶系统11Ts 的单位阶跃响应的表达是 。
6. 有系统的性能指标按照其类型分为时域性能指标和 。
7. 频率响应是线性定常系统对 输入的稳态响应。
8. 稳态误差不仅取决于系统自身的结构参数,而且与 的类型有关。
9. 脉冲信号可以用来反映系统的 。
10. 阶跃信号的拉氏变换是 。
二. 图1为利用加热器控制炉温的反馈系统(10分)炉温控制系统图1 炉温控制结构图试求系统的输出量、输入量、被控对象和系统各部分的组成,且画出原理方框图,说明其工作原理。
三、如图2为电路。
求输入电压i u 与输出电压0u 之间的微分方程, 并求该电路的传递函数(10分)图2Ru 0u iL Cu 0u i (a)(b)(c)四、求拉氏变换与反变换(10分)1.求[0.5]t te-(5分)2.求13[] (1)(2)ss s-++(5分)五、化简图3所示的框图,并求出闭环传递函数(10分)图3六、图4示机械系统由质量m 、阻尼系数C 、弹簧刚度K 和外力)(t f 组成的机械动力系统。
图4(a)中)(t x o 是输出位移。
当外力)(t f 施加3牛顿阶跃力后(恒速信号),记录仪上记录质量m 物体的时间响应曲线如图4(b )所示。
试求: 1)该系统的微分方程数学模型和传递函数;(5分) 2)该系统的自由频率n ω、阻尼比ξ;(2分)3)该系统的弹簧刚度质量m 、阻尼系数C 、弹簧刚度k ;(3分) 4)时间响应性能指标:上升时间s t 、调整时间r t 、稳态误差ss e (5分)。
1.0x 0图4(a) 机械系统 图4(b )响应曲线图4七、已知某系统是单位负反馈系统,其开环传递函数1510+=s G k ,则该系统在单位脉冲、单位阶跃和单位恒速信号(斜坡信号)作用下的稳态误差ss e 分别是多少?(10分)八、设有如图5所示的反馈控制系统,试求根据劳斯判据确定传递函数k 值的取值范围(10分)。
完整版机械工程控制期末考试试题和标准答案及评分标准模板
X i (s )J agX °(s)《机械工程控制基础》试题(A 卷)(考试时间:120分钟)、单项选择题(共10分,每小题2分)1.控制系统中,下列元件通常属于反馈元件的是 A.电压放大器;B .热电偶;C.液压马达; D •电动机;A.比例环节;B.惯性环节;C.积分环节;D. —阶微分环节; 3.二阶系统的时域性能指标上升时间 t r 、峰值时间t p 、调整时间t s 、最大超调量M p 和振荡次数N ,反应系统稳定性的是 ____________ 。
A. t r 、M p ; B. t p 、t s ; C. t r 、N ; D . M p 、N ;A. 1 ;B. 2;C. 3;D. 4 ;5. PID 校正是针对 ____________ 进行比例、积分和微分运算后形成的控制规律。
A.输入信号X j (t) ;B.输出信号x 0(t) ;C.误差信号e(t) ;D.偏差信号 (t);二、填空题(共20分,每空2分)6.1954年,我国科学家 _______________ 发表了《工程控制论》,奠定了控制工程的理论基础。
7. 对于受干扰的闭环系统,如果系统只受输入X't)作用时的输出是x 01(t),系统只受干扰n(t)作用时的输出是x °2(t),则系统同时受X i (t)和n(t)作用时的输出 X 0 (t) ______________ 。
8. 如图所示的信号流图, 前向通道的传递函数为 ___________ ,反馈通道有 _________ 条,系统 的传递函数为 __________ 。
2.某系统的传递函数是 G(s)(s 20.5),其中没有(s 1)(S s 1)环节。
4.某放大器的传递函数G(s)(Ts 1)1rad / s ,相频为 45,贝U T 的值为s(2s1)入时的稳态误差分别为 _________ 、__________ 。
机械控制工程基础第二章的答案及解析
2.1什么是线性系统?其最重要的特性是什么?下列用微分方程表示 的系统中,x 。
表示系统输出,x 表示系统输入,哪些是线性系统? (1)X o2 X oX o2x^2 X i⑵X o2 X o 2 tx^ 2 Xi(3)X o2 X o2X ^2 X i⑷x 。
2x ox 。
2tx o= 2x解:凡是能用线性微分方程描述的系统就是线性系统。
线性系统的 一个最重要特性就是它满足叠加原理。
该题中(2)和(3)是线性系 统。
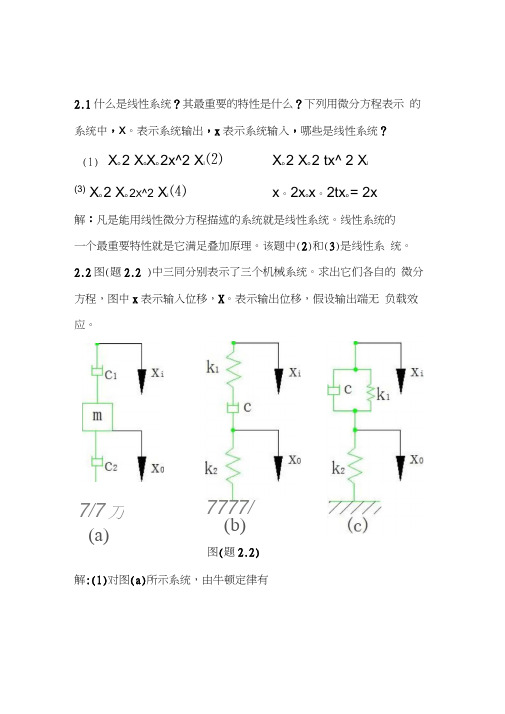
2.2图(题2.2 )中三同分别表示了三个机械系统。
求出它们各自的 微分方程,图中x 表示输入位移,X 。
表示输出位移,假设输出端无 负载效应。
图(题2.2)解:(1)对图(a)所示系统,由牛顿定律有7/7刀 (a)7777/ (b)c i( x —x 。
) —C 2X 。
二 mx 。
mx 。
( c iC 2)x 。
二 c iXi(X j-x)k i= c(x-x 。
)c(xx °) = k 2x 。
(1) (2)消除中间变量有c (总- k 2)x 。
- k ik zx 。
二 ckix(3) 对图(c)所示系统,由牛顿定律有c ( X - x 。
) k i( X - x 。
)= k zx 。
1c x°+ ( ki+ k 2)x °=cx+ kix2.3 求出图(题2.3)所示电系统的微分方程。
(a)图(题2.3)解:(1)对图⑻ 所示系统,设j 1为流过R 的电流,j 为总电流,则有1 u 厂 R ?iidtC2□ 一 u 。
二 R i j i对图(b)所示系统,引入一中间变量 x,并由牛顿定律有RiCiUiUnR解:设系统输入为M (即),输出二(即),分别对圆盘和质块进行动 力学分析,列写动力学方程如下:1U i-U 。
(i-i i)dtC1消除中间变量,并化简有C 1R 2U(1RC ) U 。
-= 0^+(肯+ C2)⑵ 对图(b )所示系统,设i 为电流,则有1CR 2U 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一. 填空题(每小题2.5分,共25分)
1. 对控制系统的基本要求一般可以归纳为稳定性、 快速性 和 准确性 。
2. 按系统有无反馈,通常可将控制系统分为 开环系统 和 闭环系统 。
3. 在控制工程基础课程中描述系统的数学模型有 微分方程 、 传递函数 等。
4. 误差响应 反映出稳态响应偏离系统希望值的程度,它用来衡量系统 控制精度的程度。
5. 一阶系统
1
1
Ts 的单位阶跃响应的表达是 。
6. 有系统的性能指标按照其类型分为时域性能指标和 频域性能指标 。
7. 频率响应是线性定常系统对 谐波 输入的稳态响应。
8. 稳态误差不仅取决于系统自身的结构参数,而且与 的类型有关。
9. 脉冲信号可以用来反映系统的 。
10. 阶跃信号的拉氏变换是 。
二. 图1为利用加热器控制炉温的反馈系统(10分)
炉温控制系统
图1 炉温控制结构图
试求系统的输出量、输入量、被控对象和系统各部分的组成,且画出原理方框图,说明其工作原理。
三、如图2为电路。
求输入电压i u 与输出电压0u 之间的微分方程, 并求该电路的传递函数(10分)
R
u 0
u i
图2
四、求拉氏变换与反变换 (10分)
1. 求[0.5]t
te -(5分)
2. 求
1
3[
](1)(2)
s
s s -++(5分)
五、化简图3所示的框图,并求出闭环传递函数(10分)
图3
六、图4示机械系统由质量m 、阻尼系数C 、弹簧刚度K 和外力)(t f 组成的机械动力系统。
图4(a)中)(t x o 是输出位移。
当外力)(t f 施加3牛顿阶跃力后(恒速信号),记录仪上记录质量m 物体的时间响应曲线如图4(b )所示。
试求: 1)该系统的微分方程数学模型和传递函数;(5分) 2)该系统的自由频率n ω、阻尼比ξ;(2分)
3)该系统的弹簧刚度质量m 、阻尼系数C 、弹簧刚度k ;(3分) 4)时间响应性能指标:上升时间s t 、调整时间r t 、稳态误差ss e (5分)。
1.0
x 0
图4(a) 机械系统 图4(b )响应曲线
图4
七、已知某系统是单位负反馈系统,其开环传递函数1
510
+=
s G k ,则该系统在单位脉冲、单位阶跃和单位恒速信号(斜坡信号)作用下的稳态误差ss e 分别是多少?(10分)
八、设有如图5所示的反馈控制系统,试求根据劳斯判据确定传递函数k 值的取值范围(10分)。
)
()
X s 1
Ts +
图5
二. 填空题(每小题2分,共20分)
10. 对控制系统的基本要求一般可以归纳为稳定性、快速性 和准确性。
11. 按系统有无反馈,通常可将控制系统分为 开环控制系统 和 闭环控制系统 。
12. 在控制工程基础课程中描述系统的数学模型有微分方程 、传递函数等。
13. 稳态误差反映出稳态响应偏离系统希望值的程度,它用来衡量系统控制精度的程度。
14. 一阶系统
1
1
Ts +的单位阶跃响应的表达是/1t T e --。
15. 有系统的性能指标按照其类型分为
时域性能指标和频域性能指标。
16. 频率响应是线性定常系统对谐波输入的稳态响应。
17. 稳态误差不仅取决于系统自身的结构参数,而且与输入信号的类型有关。
18. 脉冲信号可以用来反映系统的抗冲击能力。
10. 阶跃信号的拉氏变换是 1/s 。
二. 图1为利用加热器控制炉温的反馈系统(10分)
电压放大
功率放大
可逆电机
+
-自偶调压器~220V
U f
+给定毫伏信号
+
-电炉热电偶加热器
U e
U g 炉温控制系统
减速器
-
图1 炉温控制结构图
试求系统的输出量、输入量、被控对象和系统各部分的组成,且画出原理方框图,说明其工作原理。
解答:输出量:炉温。
输入量:给定电压信号。
被控对象:电炉。
系统包括:电位器、放大器、电机、减速器以及自藕调压器、热电偶。
原理方框图:
三.如图2为电路。
求输入电压i u 与输出电压0u 之间的微分方程,并求出该电路的传递函数。
(10分)
图2
解答:跟据电压定律得
四、求拉氏变换与反变换 3. 求[0.5]t
te -
解答:
2
112(1)s s -- 4. 求
1
3[
](1)(2)
s
s s -++
解答:=t
236t e te ---+
六、 化简框图,并求出闭环传递函数
R
u 0
u i
L C u 0u i
C
u 0
u i
R (a)
(b)
(c)002200221
1()1
i i
u dt u u RC d u du d u dt RC dt dt
RCs
G s RCs +=+==
+⎰
图4解:
七、图示机械系统由质量m 、阻尼系数C 、弹簧刚度K 和外力)(t f 组成的机械动力系统。
图(a)中)(t x o 是输出位移。
当外力)(t f 施加3牛顿阶跃力后,记录仪上记录质量m 物体的时间响应曲线如(b )图所示。
试求:
1)该系统的微分方程数学模型和传递函数;(4分)
2)该系统的弹簧刚度质量m 、阻尼系数C 、弹簧刚度k ;(3分)
3)时间响应性能指标:上升时间s t 、调整时间r t 、振荡频数N 、稳态误差ss e (5分)。
1.0
x 0
图(a) 机械系统 图(b )响应曲线
解答:
解:1)对于该系统有:
()()()()t f t kx t x c t x m =++000
故
()k
cs ms s G ++=
21
2)求k 由Laplace 变换的终值定理可知:
()()()s X s t x x s t 00
00lim lim ⋅==∞→∞
→
s
k cs ms s s 3
1lim 2
⋅++=→ k
3= 而()∞0x =1.0,因此k=3. 求m , 由()()()
%100000⨯∞∞-=
x x t x M p p 得:
%5.9%1000
.1095
.0=⨯=
p M 又由式%1002
1⨯=--ξξπ
e
M p 求得ξ=0.6
将==ξ,2p t 0.6代入2
1ξωπ
ωπ-=
=n d p t 中,得n ω=1.96。
再由2n m
k
ω=求得m=0.78。
求c 由m
c
n =ξω2,求得c=1.83.
3)求s t
==
n
s t ξω3
2.55 (取∆=0.05时)
==n
s t ξω4
3.40 (取∆=0.02时)
求r t
=-=ξ
ξβ2
1arctan
0.91
=-=
d
r t ωβ
π 2.323 求N
取∆=0.05时,πξ
ξ2
15.1-=
N =0.64
取∆=0.02时,πξ
ξ2
12-=N =0.85
求ss e
当输入为阶跃信号时,系统的稳态误差为: p
ss K e +=
11
对于0型系统 1==K K p ,代入式中求得:
ss e =0.5
八、已知某系统是单位负反馈系统,其开环传递函数1
510
+=
s G k ,则该系统在单位脉冲、单位阶跃和单位恒速信号作用下的ss e 分别是多少?(8分)
解答:该系统为单位负反馈且为0型系统,k=11, 所以该系统在单位阶跃和单位恒速信号作用下的ss e 分别是
11
1
、。
在单位脉冲信号作用下的稳态误差为
011
51011
lim )()]
()(1)[(1
lim 00
=⋅++
⋅
=⋅+⋅
=→→s s s X s H s G s H s e s i s ss
九、设有如图所示的反馈控制系统,试求根据劳斯判据确定传递函数k 值的取值范围
()
i X s ×-
0()
X s k
(s 1)(s 5)
++()
X s 1
Ts +1
s
解答:k
()(s 1)(s 5)k
G s s =
+++
系统的特征方程:(s 1)(s 5)k 0s +++= 可展开为:3
2
s 5s k 0s +++= 列出劳斯数列:
3210
15s 6k
30-k s 6s k
s
k>0,30-k>0 <0k<30。