系统结构第三章复习要点
第三章 计算机系统分层结构
PF
CF
奇偶(偶/奇)
进位(是/否)
PE
CY
PO
NC
3.总线
所谓总线是一组能为多个部件分时共享的公共信息传送线路, 它分时接收各部件送来的信息,并发送信息到有关部件。
由于多个部件连接在一组公共总线上,可能会出现多个部件争 用总线,因此需设置总线控制逻辑以解决总线控制权的有关问题。
总线分类:
CPU内部总线用来连接CPU内的各寄存器与ALU ; 系统总线用来连接CPU、主存储器与I/O接口,它通常包括 三组:数据总线、地址总线和控制总线。 按总线传送的方向可将总线分为单向总线和双向总线。
CPU是计算机的核心组成部分
3.1.1
CPU的组成
• 由算术逻辑部件ALU 、控制器、各种寄存器(寄 存器群)和CPU内部总线(连接部件) • 另:Cache
•
1.ALU部件
ALU的功能是实现数据的算术与逻辑运算 两个输入端口,参加运算的两个操作数,通常 来自CPU中的通用寄存器或ALU总线。 控制信号:ADD,SUB,OR,AND等 输出:运算结果
时序控制方式就是指微操作与时序信号之间采取何种关系,
它不仅直接决定时序信号的产生,也影响到控制器及其他部件的组 成,以及指令的执行速度。
1.同步控制方式
同步控制方式是指各项操作由统一的时序信号进行同步控制。 同步控制的基本特征是将操作时间分为若干长度相同的时钟 周期(也称为节拍),要求在一个或几个时钟周期内完成各个微 操作。在CPU内部通常是采用同步控制方式 。 同步控制方式的优点是时序关系简单,结构上易于集中,相应 的设计和实现比较方便。
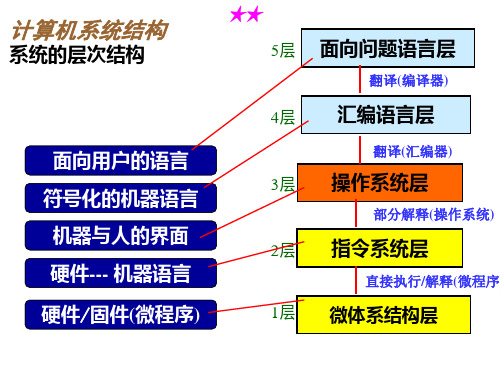
计算机系统结构
系统的层次结构
★★
5层
翻译(编译器)
计算机系统结构复习
n
2
pi (pi 表示第 i 种操作码在程序中出现的概率)
4
Copyright 2011
计算机系统结构复习提纲
© 计 081
固定长编码相对于 Huffman 编码的信息冗余量: R 1 必须知道每种操作码在程序中出现的概率
pi log i
1
n
2
pi
log n
2
扩展编码法
Huffman 操作码的主要缺点: 操作码长度很不规整,硬件译码困难 与地址码共同组成固定长的指令比较困难 扩展编码法:由固定长操作码与 Huffman 编码法相结合形成
存在的问题
以硬件为主固件为辅 固件的主要缺点是: 执行速度低。目前,ROM 的速度低于 SRAM 一条机器指令通常要多条微指令解释执行 固件的主要优点是: 便于实现复杂指令,便于修改指令系统 以硬联逻辑为主来实现指令系统 对于少数复杂的指令,目前的许多处理机也用微程序技术实现。 RISC 对编译器造成的困难主要有: (1)必须精心安排每一个寄存器的用法,以便充分发挥每一个通用寄存器的效率,尽量减少访问主存储器的次数。 (2)做数据和控制相关性分析,要调整指令的执行序列,并与硬件相配合实现指令延迟技术和指令取消技术等。 (3)要设计复杂的子程序库,RISC 的子程序库通常要比 CISC 的子程序库大得多。
2. 数据表示的含义及与数据结构的关系
数据表示的定义: 数据表示是指计算机硬件能够直接识别,可以被指令系统直接调用的那些数据类型。 例如:定点、逻辑、浮点、十进制、字符、字符串、堆栈和向量等 数据类型:文件、图、表、树、阵列、队列、链表、栈、向量、串、实数、整数、布尔数、字符等 确定哪些数据类型用数据表示实现,是软件与硬件的取舍问题
西安交大-计算机系统结构复习提纲(可打印)

1. 开发 ILP 的两种方法 硬件动态,软件静态
2. 流水线中的调度策略 集中式调度、分布式调度 动态调度——乱序 Tomasulo 算法 分布式检测:重命名(换名)
3. 动态分支预测 针对控制相关,由硬件处理, 分支历史表 BHT——历史状态, 分支目标缓冲器 BTB——历史目标地址
5. 指令结构功能设计 CISC 机:三个目标优化 (也反映了编译,操作系统和系统结构的关系) 面向目标程序、面向高级语言、面向操作系统
RISC 机: 导致 RISC 机产生的缘由; (2-8 定理;控制器负责;不易纠错修改) 设计 RISC 机遵循的基本原则;
三、计算与设计
1. 指令格式设计 2. 指令格式的优化
延迟转移技术(延迟槽) 9. 流水线中的中断处理
不精确断点、精确断点 10. 向量处理机
向量数据表示,向量指令 向量处理方式
三、计算与设计
1. 时空图 2. 性能分析 3. 非线性流水线最小平均启动时间
第四章:指令级并行
一、基本概念——名词
超标量,超流水,动态调度,静态调度,超长指令字,保留站,Tomasulo 算法,ILP,BHT, BTB,ROB,前瞻执行(先执行再确认)
计算机系统结构是机器语言程序员或编译程序编写者所看到的外特性。所谓外特性,就 是计算机的概念性结构和功能特性。
(还有一个系统结构定义,这是由于存在计算机系统层次结构,不同的人看到不同的计 算机结构) 2. 计算机系统结构、组成与实现的三者关系:
系统结构——存在某个部件 计算机组成——罗技实现,门一级实现 计算机实现——物理实现,器件一级实现
第三章:流水线技术
一、基本概念——名词
先行控制,流水线,单功能流水线,标量流水线,重定向,分支预取,专用通道,无冲突调 度方法,冲突向量,启动距离,性能分析,时空图,缓冲技术,预处理等
人体解剖生理学---第三章神经系统结构2
质前联合交叉到对侧前角细胞。 ⑩ 网状脊髓束:起于脑干网状结构,与前角
细胞联系,调节肌张力。
脊髓的功能: 1、传导机能: 中继站,能把冲动传导到高级中枢和效应 器:
脑→脊髓→效应器 感受器→脊髓→脑 2、反射机能: 浅反射、深反射和内脏反射。
交通支:连于脊神经与交感干之间。
大多数脊神经组成了三个主要的神经丛,即颈丛、 臂丛和腰骶丛。
颈丛:起源于C1-C4脊神经,其分支支配舌骨的 肌肉,以及颈部和头后部的肌肉。颈丛一个中央的 分支是支配横膈膜的膈神经,与呼吸的调节有关。
臂丛:起源于C5-T1脊神经,形成5个主要的神 经分支,分布支配上肢和肩部肌肉。
12 对脑神经记忆口诀:
1嗅、2视、3动眼; 4滑、5叉、6外展; 7面、8听、9舌咽, 10迷、11副、12、舌下泉
脑干连脑神经根歌诀
中脑连三四,桥脑五至八; 九至十二对,要在延髓查。
十二对脑神经出脑部位:
端脑:嗅神经 中脑:视神经、动眼神经、滑车神经 脑桥:三叉神经、外展神经、面神经、前庭蜗神经 延髓:舌咽神经、迷走神经、副神经、舌下神经
皮层的深面为白质,白质内还有灰质核,这些 核靠近脑底,称为基底核(或称基底神经节)。基 底核中主要为纹状体。
纹状体由尾状核和豆状核组成。尾状核前端粗、 尾端细,弯曲并环绕丘脑;豆状核位于尾状核与丘 脑的外侧,又分为苍白球与壳核。
尾状核与壳核在种系发生(即动物进化)上出 现较迟,称为新纹状体,而苍白球在种系发生上出
大脑皮层的组织结构:
分 子 层:水平细胞,水平纤 维, 星形细胞。
外 粒 层:星形细胞,小锥体 细胞。
吉林大学计算机系统结构题库第三章

第三章流水线技术知识点汇总先行控制、流水线、单功能流水线、多功能流水线、静态流水线、动态流水线、部件级流水线、处理机级流水线、处理机间流水线、线性流水线、非线性流水线、顺序流水线、乱序流水线、时空图、流水线性能评价(吞吐率、加速比、效率)、解决流水线瓶颈问题方法、相关(数据相关、名相关、控制相关)、换名技术、流水线冲突(结构冲突、数据冲突、控制冲突)、流水线互锁机制、定向技术、指令调度、预测分支失败、预测分支成功、延迟分支(从前调度、从失败处调度、从成功处调度)、流水寄存器、3种向量处理方式(横向、纵向、纵横)、链接技术。
简答题1.流水技术有哪些特点?(答出4个即可)(知识点:流水线)答:1.将处理过程分解为若干子过程,由专门的功能部件来实现,2各段的时间尽可能相等,3各部件间都有一个缓冲寄存器,4适用于大量重复的时序过程,5需要通过时间和排空时间。
2.什么是静态流水线?什么是动态流水线?(知识点:静态流水线、动态流水线)答:同一时间段内,多功能流水线中的各段只能按同一种功能的连接方式工作;同一时间段内,多功能流水线中的各段可以按照不同的方式连接同时执行多种功能。
3.什么是单功能流水线?什么是多功能流水线?(知识点:单功能流水线、多功能流水线)答:只能完成一种固定功能的流水线。
流水线的各段可以进行不同的连接,以实现不同的功能。
4.什么是线性流水线?什么是非线性流水线?(知识点:线性流水线、非线性流水线)答:流水线的各段串行连接,没有反馈回路。
流水线中除了有串行的连接外,还有反馈回路。
5.列举3种相关。
(知识点:相关)答:数据相关,名相关,控制相关。
6.流水线中有哪三种冲突?各是什么原因造成的?(知识点:流水线冲突)答:结构冲突,硬件资源满足不了指令重叠执行的要求;数据冲突,指令在流水线中重叠执行时需要用到前面指令的执行结果;控制冲突,流水线遇到分支指令和其他会改变PC值的指令。
7.选择至少2种解决流水线结构冲突的方法简述。
【软件体系结构】 复习

第一章1. 体系结构发现、演化、重用体系结构发现解决如何从已经存在的系统中提取软件的体系结构,属于逆向工程范畴。
由于系统需求、技术、环境、分布等因素的变化而最终导致软件体系结构的变动,称之为软件体系结构演化。
体系结构重用属于设计重用,比代码重用更抽象。
由于软件体系结构是系统的高层抽象,反映了系统的主要组成元素及其交互关系,因而较算法更稳定,更适合于重用。
2.基于软件体系结构的软件开发方法:问题定义—>软件需求—>软件体系结构—>软件设计—>软件实现3.评价软件体系结构的方法权衡分析方法(ATAM方法),软件体系结构分析方法(SAAM方法),中间设计的积极评审(ARID方法)第二章1. 建模结构模型:研究结构模型的核心是体系结构描述语言。
以体系结构的构件,连接件和其他概念来刻画结构。
并力图通过结构来反映系统的重要语义内容。
框架模型:与结构模型类似,但不太侧重细节,而侧重于整体结构。
动态模型:是对结构和框架模型的补充,研究系统大颗粒的行为性质。
过程模型:研究构造系统的步骤和过程,结构是遵循某些过程脚本的结果。
功能模型:认为体系结构是由一组功能构件按层次组成,下层向上层提供服务。
功能模型可以看作是一种特殊的框架模型。
4+1视图模型:逻辑视图、进程视图、物理视图、开发视图和场景视图逻辑视图主要支持系统的功能需求,即系统提供给最终用户的服务。
在逻辑视图中,系统分解成一系列的功能抽象,这些抽象主要来自问题领域。
这种分解不但可以用来进行功能分析,而且可用作标识在整个系统的各个不同部分的通用机制和设计元素。
在面向对象技术中,通过抽象、封装和继承,可以用对象模型来代表逻辑视图,用类图来描述逻辑视图开发视图通过系统输入输出关系的模型图和子系统图来描述。
进程视图侧重于系统的运行特性,主要关注一些非功能性的需求。
物理视图主要考虑如何把软件映射到硬件上。
逻辑视图和开发视图描述系统的静态结构,而进程视图和物理视图描述系统的动态结构。
第三章人类的生殖和发育复习课件济南版生物八年级上册(1)
3、保持稳定情绪
高兴、愉快、满意等积极的情绪可以提ቤተ መጻሕፍቲ ባይዱ人体 的机能,使人的免疫力增强,有助于智力的发 展。因此,在学习生活中,青少年应保持积极 的情绪,做到“乐学”,这样会提高学习效率。
(1)学会自我调节 利用合理宣泄、适当倾诉或体育娱乐转移注意力
等方式
(2)主动控制自己不符合社会道德和规范的要求 和奢望,不苛求社会与他人。
①卵黄 ②胎盘 ③脐带 ④母体(C )
A.①③B.②④C.①④D.②③
5.如图为女性生殖系统的部分结构示意图,下列说法不正确
的是( C )
A.生产卵细胞并分泌雌性激素的是① B.受精卵形成的场所是② C.怀孕是指受精卵植入③的内膜的过程 D.胚胎发育的场所是③
6.女性的卵巢和输卵管通常被称作子宫的附件.下列说法正
胎儿是图中序号[ 3 ]所示部分。[4]是_子__宫__ 胎儿在子宫内发育时,需要的营养物质和氧气是直接通 过图中序号
[ 1 ]和[2 ] 所示的结构从母体获得。
12.如图是与生殖有关的结构示意图,请分析回答:
(1)甲、乙两图比较,甲图所示生殖结构由多种组织构成, 属于 器官 层次,乙图所示生殖结构Ⅰ属于 细胞 层 次.
A.开展正常人际交往,通过正常渠道学习青春期卫生知识 B.将自己对性知识的疑惑埋藏在心里 C.正确对待身体变化,性器官的发育,第二特征的出现等 D.树立远大理想情操,把精力集中在学习和培养高尚情操上
4.“十月怀胎,一朝分娩”.母亲在怀孕期间,身体负担明 显加重.在从受精卵到胎儿呱呱坠地前的整个过程中,其 生长发育所需各种营养物质获取于:
复习主题二 青春期发育
自主学习,回答下列问题:
1、青春期发育的生理变化?
2、青春期发育的心理变化?
第三章_计算机网络体系结构要点
源进程传送消息到目 标进程的过程: 消息送到源系统的 最高层; 从最高层开始,自 上而下逐层封装; 经物理线路传输到 目标系统; 目标系统将收到的 信息自下而上逐层 处理并拆封; 由最高层将消息提 交给目标进程。
源进程 消息
逻辑通信
目标进程 消息
N+1 N N-1
Pn+1
Pn Pn-1
第三章 计算机网络体系结构
本章学习要点:
网络体系结构与协议的概念
OSI参考模型
TCP/IP参考模型 OSI与TCP/IP两种模型的比较
3.1 网络体系结构与协议的概念
3.1.1 什么是网络体系结构
计算机网络体系结构是指整个网络系统的 逻辑组成和功能分配,它定义和描述了一 组用于计算机及其通信设施之间互连的标 准和规范的集合。 也就是说:为了完成计算机间的通信合作, 把计算机互连的功能划分成有明确定义的 层次,规定了同层次实体通信的协议及相 邻层之间的接口服务。网络体系结构就是 这些同层次实体通信的协议及相邻层接口 的统称,即层和协议的集合。
3.1.2 什么是网络协议 从最根本的角度上讲,协议就是规则。 网络协议,就是为进行网络中的数据交 换而建立的规则、标准或约定。连网的 计算机以及网络设备之间要进行数据与 控制信息的成功传递就必须共同遵守网 络协议。
网络协议主要由以下三要素组成: 语法 语法是以二进制形式表示的命令和相应的结 构,确定协议元素的格式(规定数据与控制 信息的结构和格式)如何讲 语义 语义是由发出请求、完成的动作和返回的响 应组成的集合,确定协议元素的类型,即规 定通信双方要发出何种控制信息、完成何种 动作以及做出何种应答 。讲什么 交换规则 交换规则规定事件实现顺序的详细说明,即 确定通信状态的变化和过程, 。应答关系
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Cache存储系统与虚拟存储系统的区别 主要地址映像方式(全相联映像、直接映 像、组相联映像)的映像原则和地址变换 过程 并行主存系统的两种组织方式单体多字存 储器和多体交叉存储器的特点 并行主存系统地址空间的划分 Cache存储系统的基本工作原理
第3章 存储系统结构
地址映像与变换 并行主存系统 高速缓冲存储器
Cache存储系统
虚拟存储系统
3.1 地址映像与变换
概念 全相联映像及其变换 直接映像及其变换 组相联映像及其变换
一、概念
在一个由M1和M2组成的两级存储系统中, M1和M2都划分成相同大小的存储块。 地址映像:将M2中的存储块按一定的规则 装入M1中的过程。 地址变换:每次访问M1时,将M2的地址变 换成M1地址的过程。
3.4 高速缓冲存储器
基本结构和工作原理 透明性
一、Cache存储系统的工作原理
程序访问局部化性质 Cache基本工作原理
1、程序访问局部化性质 工作集
一个运行程序在t-T到t这个时间间隔内所访问 的存储块的集合称为该程序在时间t的工作集, 记为W(t,T) 如果能够将工作集全部装入Cache,可以大大 减少程序访问主存的次数
内部碎片
478
0 1023
4095
M2
M2地址 块内地址 块号
000001 0111011110 + 0 000101 1 000110 2 011001
块表
000110 0111011110
M1地址
三、直接映像及其变换
概念:将M2存储空间按M1大小等分成区。区 内各块按位置一一对应到M1的相应块上。M2 中第i块只能映像到M1中第 i mod Cb块位置上。 Cb为M1中存储块的个数。 块表:记录M1块号和M2区号信息。 地址变换:将i mod Cb与块内地址拼接成M1 地址。 优点:实现简单,成本低 缺点:块冲突概率高
1K
M1
1K
M2 存储块
二、全相联映像及其变换
地址映像:M2中任意一个存储块可以装入M1中 任意一块的位置 地址组成 块号 块内地址 块表:记录M2块号、M1块号和装入位信息。 地址变换:以M2块号为索引查块表,得到该块在 M1中对应的块号 优点:块冲突概率低,M1空间利用率高 缺点:查块表时间长
BM = W / TM
分析
CPU一次能够并行读出的字越多,主存频 宽就越大,但二者并非线性关系。 原因:
读出的字越多,存储器数据总线越长,导致传 输延迟增加 遇到转移指令,系统效率会下降
结论
由于程序的转移概率不会很低,提高并行 主存系统的频宽是有限的。
二、单体多字存储器
多个并行存储器与同一个地址寄存器连接, 同时被一个单元地址驱动,一次访问读出 沿n个存储器顺序排列的n个字 实现简单,但访存效率不高
直接映像
M2
M1
M2地址
块号Nv 区号nd 块号nv
块内地址Nr 块内地址nr 块内地址nr
M1地址
块号nv
M1块号
M2地址
M1地址
M1
四、组相联映像及其变换
概念:各组之间直接映像,组内各块之间全相 联映像。M2中的每一块可以映像到M1中唯一 的一个组中的任何一个位置 块表:记录M2区号、M2组内块号和M1块号 信息。 地址变换:将M2组号、组内块号与块内地址 拼接成M1地址。 优点:块冲突概率低
三、多体交叉存储器
在包含多个能够独立编址的多体并行主存 系统中,各分体间的地址编号采用交叉方 式。
1、多体交叉编址
2、多体交叉存储体分时工作原理 Nhomakorabea每个存储体的启动间隔为 其中:Tm为每个存储体的访问周期, n为存储体个数
三、并行主存系统地址空间的划分
三、并行主存系统地址空间的划分
按高位地址划分 按低位地址划分
全相联地址映像
M2 M1
M2地址 M1地址
块号Nv 块号nv
块内地址Nr 块内地址nr
全相联地址变换
M2地址
M1地址
M2块号
M1块号
设每个块长1KB
M2地址=1502 块号=1 块内地址=478
0000 0101 1101 1110
0
000001 0111011110
0#块 1#块 2#块 3#块 M2
按高位地址划分
实现方法:用地址码的高位部分区分存储体号, 低位部分是各存储体的体内地址 参数计算方法: m:每个存储体的容量 n:存储体的个数 j:存储体的体内地址,j=0,1,2,…,m-1 k:存储体的体号,k=0,1,2,…,n-1 主存地址A=m×k+j 存储器的体内地址Aj=A mod m 存储体体号:
2、 Cache基本结构
组相联地址映像
M2 M1
组相联地址变换
M2地址
M1地址
M2块号
M1块号
3.2 并行主存系统
并行主存系统频宽分析 单体多字存储器 多体交叉存储器 并行主存系统地址空间的划分
一、并行主存系统频宽分析
• 并行主存系统:通过引入并行和重叠技术,在保 持每位价格不变的情况下,使得主存的频宽得到 较大的提高 • 频宽:设某存储器的访问周期为TM,存储器字长 为W位,则频宽为:
按低位地址划分
实现方法:用地址码的低位部分区分存储体号, 高位部分是各存储体的体内地址 参数计算方法: m:每个存储体的容量 n:存储体的个数 j:存储体的体内地址,j=0,1,2,…,m-1 k:存储体的体号,k=0,1,2,…,n-1 主存地址A=n×j+k 存储器的体内地址 存储体体号: Ak=A mod m