基于Matlab和Arduino的智能循迹小车的设计
《2024年基于Arduino的智能小车自动避障系统设计与研究》范文

《基于Arduino的智能小车自动避障系统设计与研究》篇一一、引言随着科技的不断发展,智能化和自动化成为现代社会发展的重要方向。
其中,智能小车作为智能交通系统的重要组成部分,具有广泛的应用前景。
自动避障系统作为智能小车的关键技术之一,对于提高小车的安全性和智能化水平具有重要意义。
本文将介绍一种基于Arduino的智能小车自动避障系统的设计与研究。
二、系统设计1. 硬件设计本系统采用Arduino作为主控制器,通过连接超声波测距模块、电机驱动模块、LED灯等硬件设备,实现对小车的控制。
其中,超声波测距模块用于检测小车前方障碍物的距离,电机驱动模块用于控制小车的运动,LED灯则用于指示小车的状态。
2. 软件设计本系统的软件设计主要包括Arduino程序的编写和上位机界面的开发。
Arduino程序采用C++语言编写,实现了对小车的控制、数据采集和处理等功能。
上位机界面则采用图形化界面设计,方便用户进行参数设置和系统监控。
三、自动避障原理本系统的自动避障原理主要基于超声波测距模块的测距数据。
当小车运行时,超声波测距模块不断检测前方障碍物的距离,并将数据传输给Arduino主控制器。
主控制器根据测距数据判断是否存在障碍物以及障碍物的距离,然后通过控制电机驱动模块,使小车进行避障动作。
四、系统实现1. 超声波测距模块的实现超声波测距模块通过发射超声波并检测其反射时间,计算出与障碍物的距离。
本系统中,超声波测距模块采用HC-SR04型号,具有测量精度高、抗干扰能力强等优点。
2. 电机驱动模块的实现电机驱动模块采用L298N型号的H桥驱动芯片,可以实现对电机的正反转和调速控制。
本系统中,通过Arduino的PWM输出功能,实现对电机的精确控制。
3. 系统调试与优化在系统实现过程中,需要进行多次调试和优化。
通过调整超声波测距模块的灵敏度、电机驱动模块的控制参数等,使系统达到最佳的避障效果。
同时,还需要对系统的稳定性、响应速度等进行测试和优化。
基于Matlab simulink编程的Arduino闭环控制小车

基于Matlab/simulink编程的闭环控制小车上位机软件设计摘要随着科学技术的发展,直流电机的应用越来越广泛,驱动与控制直流电机的方式方法也越来越多。
计算机软件与单片机技术也高度发展,越发成熟,目前计算机已经能够通过软件实现与单片机的无缝对接。
本设计就是一种基于PC软件Matlab/simulink编程的闭环控制小车上位机软件系统,用于控制一辆小车。
该小车由两台带有编码器的直流电机驱动,两轮独立驱动。
小车在闭环控制系统作用下,能够遵循上位机指令运动:前进,后退,加速,减速,转弯,停止。
Matlab/simulink和驱动小车的单片机系统能够通过串口无缝对接,Matlab/simulink模型能够在线监测小车状态,并且可以能够实时整定控制系统参数,对小车的运行状态进行控制。
本设计采用的电机是普通直流电机,两电机各带有一个编码器;采用的单片机为Avr单片机--Arduino Mega2560。
单片机接受上位机指令,检测电机编码器脉冲。
指令和反馈的实际值比较后,经过PID控制算法的处理得到控制量,最后通过PWM方式,通过L298N控制电机旋转。
小车在闭环控制系统作用下,能够遵循指令运动。
关 键 词:Matlab/simulink,直流电机,PWM,PID反馈调节,Arduino Mega2560单片机PC PROGRAM DESIGN OF THE CAR WITH PIDCONTROLL BASED ON MATLAB/SIMULINKABSTRACTWith the development of technology, DC motor’s applications gets more and more extensive, and the ways to drive and control the DC motors become more. PC program and the technology of singlechip highly developed, become more mature, so at the present time PC can connect with singlechip without gap through program. This design is a kind of closed-loop PC program system based on Matlab/simulink, that controls a small car. The car is drive by two DC motor with encoder, and the two DC motor is drive alone. The car can move follow the command of PC under the closed-loop control system: forward, back, speedup, slowdown, turn, and stop. The singlechip system drive the car can connect with Matlab/simulink without gap through USB, and Matlab/simulink can monitor the state of the car online, and can set and control the parameters of system real time to control the move state of the car.In this design, the normal DC motors is used, two motors each with an encoder, the AVR singlechip is used----Arduino Mega2560. The singlechip achieve the commands of PC, monitor the pulses of encoders. The commands compared with the actual value, then get the control value through PID control, finally, through PWM control the DC motors wheel by L298N. The car can move follow the commands under closed-loop control system.KEY WORDS: Matlab/simulink, DC motor, PWM, PID feedback control, Arduino Mega2目 录前言 (1)第1章 硬件介绍 (3)§1.1直流电机简介 (3)§1.2 Arduino Mega2560简介 (4)§1.3编码器简介 (6)§1.4驱动器L298N简介 (7)第2章 上位机软件环境介绍 (9)§2.1 Matlab简介 (9)§2.2 Simulink简介 (10)§2.3 安装Arduino的simulink软件包 (11)§2.4 在simulink中建立模型 (11)第3章 系统模型的建立 (13)§3.1系统整体结构设计 (13)§3.2 电机控制系统设计 (14)§3.3 编码器转换系统设计 (16)§3.4 PID控制器及其算法设计 (18)§3.4.1 PID控制器的原理及作用 (18)§3.4.2 比较器的建立 (20)§3.4.3 PID控制器的构建及参数整定 (21)第4章 运行调试与结果分析 (23)结论 (28)参考文献 (29)致谢 (30)前 言世界上最贵重的,是人的生命。
一种基于Arduino平台的智能循迹避障小车的硬件设计
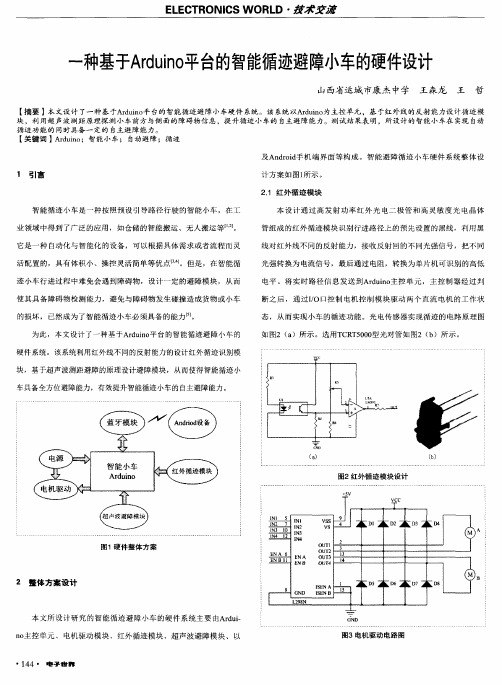
图4避 障 模 块 设 计
2.2 电机 控 制模 块
智能循迹 小车采 用直流 电机作为执 行器件 ,采用 直流 电机 驱动芯
片 L298N作 为 电机 驱动 芯片 ,通 过通 过Arduino主控单 元发 出的PWM
调 制信 号实现 电机转速 的控制 ,通过控 制两个 直流 电机 的转速 来实现
(b)
基 于 Arduino平 台 的智 能循 迹避 障 小车 硬件 系统 ,采用
红 外循迹 模 块实 现其 循迹 功
能 ,为 了避 免 循迹 小车 在 行进 过程 中 由于无 法 躲避 障碍 物造 成 的损
为此 ,本文 设计 了一 种基 于Arduino平 台的 智能循 迹避 障小 车的 如 图2 (a)所示 。选 用TCRT5000型光对 管如 图2 (b)所示 。
硬 件系统 。该系 统利用 红外线不 同 的反 射能力 的设计红 外循迹识 别模
块 ,基 于超 声波 测距避 障的原理 设计避 障模块 ,从而使 得智能循 迹小
ELECTRONICS W ORLD · j
一 种基于Arduino平台的智能循迹避障小车的硬件设计
山西省运城 市康 杰 中学 王森龙 王 哲
【摘要 】本文设计 了一种基"I-Arduino平台的智能循迹避 障小车硬件 系统 。该 系统 ̄'XArduino为主控单元 ,基 于红外线的反射能力设计循迹模 块 ,利 用超声 波测 距 原理探 测 小车前 方 与侧 面的 障碍 物信 息 ,提 升循 迹 小车 的 自主避 障能 力 。测 试 结果表 明 ,所设 计 的智能 小车在 实现 自动 循 迹 功能 的 同时具 备 一定 的 自主 避 障能 力。
本 设计 通 过 高 发 射 功 率 红 外光 电二 极 管 和 高灵 敏 度 光 电晶体
智能循迹小车设计与实现

智能循迹小车设计与实现摘要:智能循迹小车是一种能够根据预设的路径自动行驶的装置。
本文主要介绍了智能循迹小车的设计与实现过程,包括硬件设计、软件编程以及测试和优化等内容。
通过使用光电传感器和电机驱动模块,实现了小车的自动行驶功能。
实验结果表明,智能循迹小车能够准确地沿着指定的路径行驶。
关键词:智能循迹小车,光电传感器,电机驱动模块1.引言智能循迹小车是一种基于传感器和控制模块的自动驾驶装置。
它能够通过感知周围环境并根据预先设定的路径进行行驶。
智能循迹小车在工业生产、仓储管理和物流配送等领域具有广泛的应用前景。
本文主要介绍了智能循迹小车的设计与实现过程。
2.硬件设计主控模块采用单片机作为核心处理器,并配备了存储器、通信接口和控制信号输出等功能。
传感器模块主要由光电传感器组成,用于感知小车当前位置和行驶方向。
执行器模块由电机驱动模块组成,用于控制小车的移动。
3.软件编程传感器数据采集模块负责读取光电传感器的输出信号,并进行信号处理和滤波。
路径规划模块通过分析传感器数据,确定小车当前位置和行驶方向,并根据预设的路径规划算法,确定下一步行驶方向。
运动控制模块通过调节电机驱动模块的输入信号,控制小车的运动。
4.测试与优化为了验证智能循迹小车的性能,我们进行了一系列的测试和优化。
首先,我们对传感器进行了校准,以确保其输出信号的准确性。
然后,我们在实际场景中对小车进行了测试,包括行驶精度、速度和稳定性等方面的测试。
根据测试结果,我们对软件进行了调优,并对硬件进行了优化,以提高智能循迹小车的性能。
5.结论本文介绍了智能循迹小车的设计与实现过程。
通过使用光电传感器和电机驱动模块,我们实现了小车的自动行驶功能。
实验表明,智能循迹小车能够准确地沿着指定的路径行驶。
未来,我们将进一步改进小车的设计和算法,以提高其性能和适应性。
基于Arduino智能循迹车设计毕业设计共22页

•
26、我们像鹰一样,生来就是自由的 ,但是 为了生 存,我 们不得 不为自 己编织 一个笼 子,然 后把自 己关在 里面。 ——博 莱索
•
27、法律如果不讲道理,即使延续时 间再长 ,也还 是没有 制约力 的。— —爱·科 克
•
28、好法律是由坏风俗创造出来的。 ——马 克接受法律支配的人类 的状态 中,哪 里没有 法律, 那里就 没有自 由。— —洛克
•
30、风俗可以造就法律,也可以废除 法律。 ——塞·约翰逊
计
16、业余生活要有意义,不要越轨。——华盛顿 17、一个人即使已登上顶峰,也仍要自强不息。——罗素·贝克 18、最大的挑战和突破在于用人,而用人最大的突破在于信任人。——马云 19、自己活着,就是为了使别人过得更美好。——雷锋 20、要掌握书,莫被书掌握;要为生而读,莫为读而生。——布尔沃
毕业设计基于单片机的智能循迹小车

第1章绪论1.1课题背景目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车辆以及在智能车辆基础上开发出来的产品已成为自动化物流运输、柔性生产组织等系统的关键设备。
世界上许多国家都在积极进行智能车辆的研究和开发设计。
移动机器人是机器人学中的一个重要分支,出现于20世纪06年代。
当时斯坦福研究院(SRI)的Nils Nilssen和charles Rosen等人,在1966年至1972年中研制出了取名shakey的自主式移动机器人,目的是将人工智能技术应用在复杂环境下,完成机器人系统的自主推理、规划和控制。
从此,移动机器人从无到有,数量不断增多,智能车辆作为移动机器人的一个重要分支也得到越来越多的关注。
智能小车,是一个集环境感知、规划决策,自动行驶等功能于一体的综合系统,它集中地运用了计算机、传感、信息、通信、导航及白动控制等技术,是典型的高新技术综合体。
智能车辆也叫无人车辆,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的综合系统。
它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。
智能车辆的主要特点是在复杂的道路情况下,能自动地操纵和驾驶车辆绕开障碍物并沿着预定的道路(轨迹)行进。
智能车辆在原有车辆系统的基础上增加了一些智能化技术设备:(1)计算机处理系统,主要完成对来自摄像机所获取的图像的预处理、增强、分析、识别等工作;(2)摄像机,用来获得道路图像信息;(3)传感器设备,车速传感器用来获得当前车速,障碍物传感器用来获得前方、侧方、后方障碍物等信息。
智能车辆技术按功能可分为三层,即智能感知/预警系统、车辆驾驶系统和全自动操作系统团。
上一层技术是下一层技术的基础。
三个层次具体如下:(1)智能感知系统,利用各种传感器来获得车辆自身、车辆行驶的周围环境及驾驶员本身的状态信息,必要时发出预警信息。
主要包括碰撞预警系统和驾驶员状态监控系统。
碰撞预警系统可以给出前方碰撞警告、盲点警告、车道偏离警告、换道/并道警告、十字路口警告、行人检测与警告、后方碰撞警告等.驾驶员状态监控系统包括驾驶员打吨警告系统、驾驶员位置占有状态监测系统等。
基于Matlab和Arduino的智能循迹小车的设计
工业自动化学院《智能玩具及机器人专业实训》报告(201 -201 学年第学期)课程实训题目:智能寻迹小车的设计姓名:学号:班级:指导老师:***时间:成绩:目录一、课程设计性质和目的 (3)二、课程设计的内容及要求 (4)三、课程设计的进度及安排 (5)四、设计所需设备及材料 (6)1. 传感器原理 (6)2. L298N电机驱动模块 (7)五、设计思路及原理分析 (8)六、控制系统建模 (9)1. 安装arduino支持包 (9)2. 控制逻辑分析 (11)3. Simulink建模 (11)七、调试运行 (13)1. 测试传感器 (13)2. 电机驱动模块的调试 (14)3. 整体调试 (14)八、结果及分析 (15)九、心得体会 (16)十、参考文献 (17)十一、致谢 (18)十二、附录 (19)一、课程设计性质和目的智能玩具及机器人专业实训是《智能玩具设计》课程与实验结束后的一门综合性实践课。
所选题目《智能寻迹车》紧密结合所学的主要内容,加深巩固所学知识,同时对所学内容进行扩展,有一定的深度和广度,能充分发挥学生的能动性和想象力。
通过设计、安装、调试等一系列环节的实施,提高学生利用matlab 进行控制系统设计的能力。
二、课程设计的内容及要求设计要求可分为两大部分:寻迹车的设计和控制算法的设计。
1、寻迹车的设计(1)组装寻迹小车底盘;(2)光电传感器电路设计;(3)电机驱动器、控制器、电池组、电源、传感器布局。
硬件平台:Arduino MEGA2560、智能车底板、轮子、轴联器、L支架、金属减速电机、智能车万向轮、直流电机驱动器、移动电源、电池组、光电传感器等。
2、控制算法的设计(1)根据功能要求确定控制思路;(2)在matlab/simulink平台中建立寻迹车控制系统模型。
软件平台:Windows XP;MatlabR2013a;Simulink Support Package for Arduino Hardware;Arduino IDE。
基于快速控制原型的智能小车控制系统设计与开发
基于快速控制原型的智能小车控制系统设计与开发智能小车作为一种具有自主导航和自动驾驶能力的机器人系统,在日常生活和工业领域中发挥着重要的作用。
为了实现智能小车的高效控制,本文基于快速控制原型开展了智能小车控制系统的设计与开发。
首先,我们需要确定智能小车控制系统的整体架构。
该系统包括感知模块、决策模块和执行模块。
感知模块负责从环境中获取传感器数据,例如摄像头图像和距离传感器的数据。
决策模块利用感知模块获取的数据进行分析和决策,确定小车的行驶策略。
最后,执行模块根据决策模块的指令,控制小车的电机和转向机构,实现具体的运动控制。
接下来,我们使用快速控制原型的方法进行系统设计与开发。
快速控制原型是一种迭代的设计方法,能够快速验证和修改系统设计。
首先,我们采用MATLAB/Simulink工具进行建模和仿真。
通过建立小车的动力学模型,我们可以在仿真环境中验证控制算法的有效性和稳定性。
同时,我们还可以在仿真环境中模拟不同场景和障碍物,以测试系统在复杂环境下的性能。
在模型验证通过后,我们将控制算法移植到硬件平台上进行实际测试。
我们选择了Arduino作为硬件平台,它具有开源性和易于扩展的特点。
通过与Arduino的串口通信,我们可以将控制算法上传到硬件平台,并实时接收传感器数据和控制指令。
在实际测试中,我们还可以通过添加避障传感器和通信模块等扩展硬件,提升智能小车的功能和性能。
最后,我们对系统进行优化和改进。
通过不断迭代设计和测试,我们可以发现系统中存在的问题和不足之处,并进行相应的改进。
例如,我们可以优化控制算法的实时性和鲁棒性,提高智能小车在复杂环境下的导航和避障能力。
此外,我们还可以对硬件平台进行优化,例如改进传感器精度和增加电池容量,提升系统的性能和稳定性。
综上所述,本文基于快速控制原型开展了智能小车控制系统的设计与开发。
通过模型验证和实际测试,我们可以得到一个具有高效控制能力的智能小车系统。
这对于智能交通、物流运输和工业自动化等领域的发展具有重要意义。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
15 M3 螺母
16 9V 电池
17 导线
表 2 材料清单
数量 1 1 1 1 2 2 2 2 2 2 2 1 8 20 12 1 若干
1. 传感器原理
根据反射式红外光电传感器的原理和内部结构,我们可以设计如图 4.1 所示 的电路,电阻主要起限流作用,电阻值常设置为:R1=470Ω,R2=10kΩ。
9
图 6.2 安装方式
图 6.3 安装路径
图 6.4 登录账号
图 6.5 同意协议
图 6.6 安装授权
图 6.7 安装
图 6.8 安装过程
10
图 6.9 安装完成
2. 控制逻辑分析
首先,我们要确定小车有三种运动状态:直走,左转和右转。首先小车是放 在直道上,左右两个传感器均没有感应到黑线,此时直走。接下来就是转弯,这 里要分两种情况:左转弯和右转弯;以左转弯为例,此时左边的传感器就会感应 到黑线,控制电机右轮速度大于左轮速度进行左转,直到右边的传感器感应到黑 线,否则一直执行左转的程序,这样是为了防止转弯的半径小于跑道弯道的半径 时,能够转回来;假如跳出左转循环的结束条件为当左边的传感器感应不到黑线, 则会出现两种情况:一种是小车的转弯半径小于跑道的弯道半径,小车转回跑道; 另一种是小车的转弯半径大于跑道的弯道半径,此时左边传感器也感应不到黑线, 但是此时小车已经跑出跑道了。右转弯同理。程序流程图如下图 6.10 所示。
1. 安装 arduino 支持包
我们要在 Matlab 下面进行对 arduino 的控制建模,首先要安装 arduino 的 支持包,点击任务栏下的【Add One】->【Get Hardware Support Packages】, 如下图 6.1 所示:
图 6.1 Get Hardware Support Packages 然后会出现如下图 6.2 所示,有两种安装方法,一种在线安装,一种是离线 安装。由于受到网络环境的限制,我们选择离线安装的方式,选择【Folder】选 项,然后点【Next>】,出现如下图 6.3 所示界面,点【Next>】,出现如图 6.4 所示界面,点【Log in】,我们需要在 上注册一个账号,我们登 陆以后会看到图 6.5 所示,勾选同意,点【Next>】,然后会跳转到图 6.6,点【Next>】, 然后进入图 6.7 界面,点【Intall】,图 6.8 是安装中的截图,如出现图 6.9 所 示界面,即安装成功,可以在 simulink 库上看到 arduino 相关的库。
2
一、 课程设计性质和目的
智能玩具及机器人专业实训是《智能玩具设计》课程与实验结束后的一门综 合性实践课。所选题目《智能寻迹车》紧密结合所学的主要内容,加深巩固所学 知识,同时对所学内容进行扩展,有一定的深度和广度,能充分发挥学生的能动 性和想象力。通过设计、安装、调试等一系列环节的实施,提高学生利用matlab 进行控制系统设计的能力。
1. 传感器原理......................................................................................................6 2. L298N 电机驱动模块.......................................................................................7 五、 设计思路及原理分析......................................................................................8 六、 控制系统建模..................................................................................................9 1. 安装 arduino 支持包......................................................................................9 2. 控制逻辑分析................................................................................................11 3. Simulink 建模...............................................................................................11 七、 调试运行........................................................................................................13 1. 测试传感器....................................................................................................13 2. 电机驱动模块的调试....................................................................................14 3. 整体调试........................................................................................................14 八、 结果及分析....................................................................................................15 九、 心得体会........................................................................................................16 十、 参考文献........................................................................................................17 十一、 致谢............................................................................................................ 18 十二、 附录............................................................................................................ 19
图 4.2 焊接完成的传感器
2. L298N 电机驱动模块
L298N 是 ST 公司生产的一种高电压、大电流电机驱动芯片。内含两个 H 桥的 高电压大电流全桥式驱动器,采用标准逻辑电平信号控制;该芯片可以驱动两台 直流电机。
L298N 的工作原理是内部有两个 H 桥,分别控制两个电机 ,H 桥的工作原理 如下图 4.3 所示,当 IN1 通电时,电流从正极经过 Q1 到电机再到 Q4,最后回到 负极,此时电机正转;当 IN2 通电时,电流从正极经过 Q3 到电机再到 Q2,最后 回到负极,此时电机反转。IN1 和 IN2 不能同时通电,否则会短路。接线方式如 下图 4.4 所示。
3
二、 课程设计的内容及要求
设计要求可分为两大部分:寻迹车的设计和控制算法的设计。 1、寻迹车的设计 (1)组装寻迹小车底盘; (2)光电传感器电路设计; (3)电机驱动器、控制器、电池组、电源、传感器布局。 硬件平台:Arduino MEGA2560、智能车底板、轮子、轴联器、L 支架、金属
减速电机、智能车万向轮、直流电机驱动器、移动电源、电池组、光 电传感器等。 2、控制算法的设计 (1)根据功能要求确定控制思路; (2)在 matlab/simulink 平台中建立寻迹车控制系统模型。 软件平台:Windows XP; MatlabR2013a; Simulink Support Package for Arduino Hardware; Arduino IDE。
时间 半天 半天 半天 半天 半天 半天 半天 半天 半天 半天
5
四、 设计所需设备及材料
序号 名称
1
Arduino Mega2560
2
小车底板
3
万向轮
4
L298N 电机驱动模块
5
电机支架
6
直流减速电机
7
联轴器
8
轮胎
9
ST188
10 470 欧电阻
11 10K 电阻
12 面包板
13 M3 铜柱
14 M3 螺丝
工业自动化学院
《智能玩具及机器人专业实训》报告
(201 -201 学年第 学期)
课程实训题目:智能寻迹小车的设计
姓名: 学号: 班级: 指导老师: 唐伟杰 时间: 成绩:
目录
一、 课程设计性质和目的......................................................................................3 二、 课程设计的内容及要求..................................................................................4 三、 课程设计的进度及安排..................................................................................5 四、 设计所需设备及材料......................................................................................6