卫星激光测距光路设计
用于相位法激光测距的电路系统设计
用于相位法激光测距的电路系统设计激光测距是一种常用的非接触式测量技术,可以精确测量目标物体与测距仪的距离。
相位法激光测距是其中一种常见的方法,通过测量激光光波的相位差来计算距离。
下面将介绍一个基于相位法激光测距原理的电路系统设计。
1. 激光发射电路:设计一个激光二极管的驱动电路,可以通过电流控制二极管的发射光强。
使用一个恒流源以确保驱动电流的稳定性。
此外,还需要添加一个调节电路,可以根据需要调整激光发射的光功率。
2. 光电检测电路:将光电二极管作为光电检测元件接在测距仪上,用于接收激光反射光信号。
光电二极管产生的电流与光的强度成正比。
使用一个高增益的放大器将光电二极管产生的微弱电流信号放大。
3. 相位差测量电路:使用一个相位差测量电路来测量激光光波发射和接收之间的相位差。
该电路可以采用锁相放大器或频率调制技术。
在锁相放大器中,将激光发射的信号作为参考信号,将光电二极管接收到的信号作为待测信号输入。
锁相放大器可以精确测量相位差,并输出一个稳定的直流电压信号。
4. 距离计算电路:将锁相放大器输出的直流电压信号输入到距离计算电路中,根据相位差和激光波长的关系,计算出目标物体与测距仪之间的距离。
该电路可以通过编程芯片或者专门的测距芯片来实现距离计算。
以上是一个基于相位法激光测距原理的电路系统设计。
通过精心选择和设计各个电路模块,可以实现高精度和稳定的激光测距功能。
需要注意的是,在实际设计中还需考虑电路的抗干扰能力、功率稳定性和其他实际应用需要的因素。
在激光测距中,相位法是一种常用的方法,能够提供高精度和高稳定性的测距结果。
相位法激光测距的原理是通过测量激光发射和接收之间的光波相位差来计算目标物体与测距仪之间的距离。
在设计电路系统时,需要考虑到激光发射电路、光电检测电路、相位差测量电路和距离计算电路等各个环节。
首先,激光发射电路是相位法激光测距系统中的重要组成部分。
它负责驱动激光二极管发射具有稳定光强的激光光束。
激光测距方案开发思路

激光测距方案开发思路概述激光测距是一种常用的测量技术,广泛应用于工业生产、医学、机器人以及航天等领域。
本文将介绍激光测距方案的开发思路,包括硬件选型、算法设计和实施流程。
硬件选型在选择激光测距方案的硬件时,需要考虑以下几个因素:1.激光器:选择合适的激光器是激光测距方案的基础。
常见的激光器包括半导体激光器、二极管激光器和固体激光器等。
根据应用需求,选择合适的激光器波长和功率。
2.接收器:接收器的选择需要考虑激光信号的输入、信号处理和输出等功能。
常见的接收器包括光电二极管、光敏电阻和光电探测器等。
3.光路设计:光路设计是激光测距方案中重要的一环。
需要设计合适的光路布局,并考虑光路的折射、反射和衍射等因素。
算法设计激光测距方案的算法设计是实现测距功能的核心部分。
以下是常用的激光测距算法:1.直接测量法:通过测量激光信号的来回传播时间来计算距离。
该方法简单、快速,但受到测量误差和信号衰减的影响。
2.相位测量法:通过测量激光信号的相位差来计算距离。
该方法精度较高,但对硬件和算法的要求也较高。
3.强度测量法:通过测量激光信号的能量衰减来计算距离。
该方法精度一般,但适用于较长距离的测量。
根据应用需求,选择合适的算法设计。
实施流程激光测距方案的实施流程如下:1.设计硬件原型:根据硬件选型和激光测距算法,设计硬件原型。
包括激光器、接收器、光路和信号处理等部分。
2.搭建测量平台:将硬件原型搭建在测量平台上,保证光路的稳定和准确性。
3.调试和优化:通过调试和优化硬件和算法,改进测量精度和速度。
4.数据处理和展示:使用合适的数据处理和展示工具,对测量结果进行分析和展示。
注意事项在开发激光测距方案时,需要注意以下几个事项:1.安全性:激光器是一种高能光源,需要避免对人眼造成伤害。
在使用激光器时,需要遵循相关的安全操作规范。
2.环境因素:激光测距方案的性能会受到环境因素的影响,如温度、湿度和气压等。
在设计和使用过程中,需要考虑这些因素对测量结果的影响。
卫星激光测距技术与应用
卫星激光测距技术与应用摘要:卫星激光测距(Satellite Laser Ranging)技术是现代空间大地测量最先进技术之一,它可以为人造卫星提供精密的距离观测和定轨,在其他领域中也得到广泛应用。
关键词:SLR;SLR发展;卫星精密定轨一、卫星激光测距定义卫星激光测距也称激光测卫,是目前空间大地测量技术中精度最高的一种。
卫星激光测距(satellite laser ranging,SLR)是利用安置在地面上的卫星激光测距系统所发射的激光脉冲,跟踪观测装有激光反射棱镜的人造地球卫星,以测定测站到卫星之间的距离的技术和方法。
是卫星单点定位中精度最高的一种,已达厘米级。
可精确测定地面测站的地心坐标、长达几千千米的基线长度、卫星的精确轨道参数、地球自转参数、地心引力常数、地球重力场球谐系数、潮汐参数以及板块运动和地壳升降速率等。
二、SLR特点及其发展历史空间大地测量和地学研究在很大程度上依赖于大量、精确的观测数据,这些数据包含广阔的空间和时域上的频谱信息。
卫星激光测距——SLR的工作原理是通过精确测定激光脉冲从地面观测点到装有反射器卫星的往返时间间隔,从而算出地面观测点至卫星的距离。
1960年,美国研制了第一台红宝石激光器,证实了激光具有远程测量的能力。
1962年,美国人Henry Plotkin提出在飞行器上安装激光反射器,并应用于大地测量。
1964年10月,美国在BE-B卫星上实现了人造卫星激光测距,当时的精度为米级。
从上世纪60年代至90年代近30年间, SLR的观测量和观测精度都提高了几个数量级。
90年代DORIS、GPS这些运用电磁方法的测量手段已能达到SLR的性能指标,同时由于新技术的出现也使SLR性能得以提高:通过雪崩单光子二极管(欧洲使用)和微通道光电倍增器(美国使用)和其它技术的使用, SLR的测量精度已达到厘米级。
由于空间技术的发展,大地测量、地球物理、海洋学等都应用了适合自己的技术,但SLR仍然在这些领域起着举足轻重的作用:与GPS相比,由于它可以直接在地面上进行调试和维护,所以由它提供的地球参考框架长周期精度更高;另外空间的激光目标可认为具有无限寿命周期,这也是其它观测手段无法比拟的;重力场研究中, SLR由于可以从LAGEOS观察数据中得到重力常数GM的值,所以在定轨中它能提供绝对尺度因子。
激光测距高速采集和处理电路的设计
1 硬 件 电路 设 计
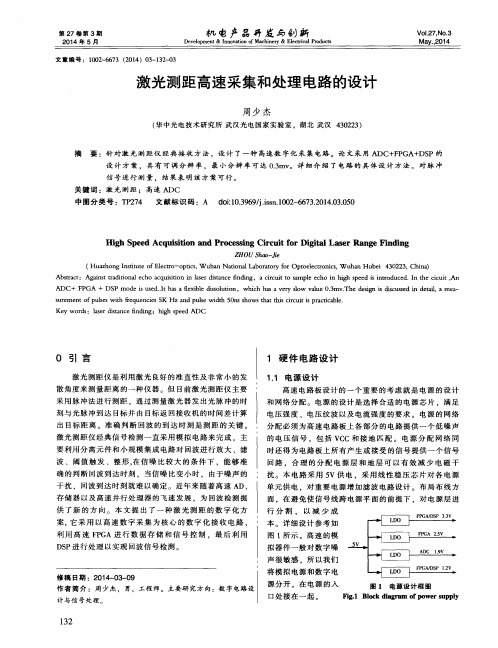
1 . 1 电 源设计
高速 电路 板设 计 的一 个 重要 的考 虑 就是 电源 的 设计 和 网络分 配 。 电源 的设 压 强 度 、 电 压 纹 波 以及 电 流 强 度 的 要 求 。 电 源 的 网 络
分配 必须 为 高速 电路板 上各 部 分 的 电路提 供 一个 低 噪 声 的 电压 信 号 ,包 括 V C C和接 地 匹配 。 电源 分 配 网 络 同
设 计 方 案 ,具 有 可调 分 辨 率 ,最 小分 辨 率 可达 0 . 3 mv 。详 细介 绍 了 电路 的具 体设 计 方 法 。对 脉 冲 信 号 进行 测量 .结 果表 明 该方 案 可行 。
关 键 词 :激 光 测 距 : 高速 A DC
中 图分 类号 :T P 2 7 4 文 献标 识码 :A d o i : 1 0 . 3 9 6 9 / j . i s s n . 1 0 0 2 — 6 6 7 3 . 2 0 1 4 . 0 3 . 0 5 0
ADC + F PGA + D S P mod e i s us e d. . I t ha s a l f e x i b l e &s s o l u io f n, wh i c h ha s a v e r y s l o w v lue a 0. 3 mv. The d e s i g n i s d i s c us s e d i n de t a i l ,a me a - s u r e me n t o f p ul s e s wi t h f r e q ue nc i e s 5 K Hz nd a p u l s e wi d t h 5 0 m s ho ws t ha t t hi s c i r c ui t i s pr a c i t c a b l e .
激光测距系统的设计

一 、引言
随着激光技术的发展 ,激光的应用越来越广泛 , 尤其是在军事上 ,激光测距机的诞生 ,对军队的作战 和训练等产生了革命性的影响 。在激光测距机出现 以前 ,坦克炮 、地炮 、高炮和舰炮等通常用光学测距 机测距 。光学测距机无论是合象式的还是体视式 的 ,其测试精度随距离而变化 ,测程越远 ,精度越差 , 操作也比较复杂 , 而且仪器的体积受基线长短的限 制 。针对上述光学测距存在的问题 , 本文设计了激 光测距光学系统 。该系统突出的优点是 : (1) 测距精 度高 ,并且与测程远近无关 ; (2) 仪器体积小 ,测距迅 速 ; (3) 便于数字信息处理 ; (4) 角分辨力高 , 抗干扰 能力强等 。
输出功率 15mW
重复频率 90pps (每秒钟的周期数或脉冲
数)
接收探测器 硅雪崩光电二极管
接收镜孔径 18~100mm
四 、应用与展望
随着激光 、红外 、电视 、微光 、光纤 、多光谱和全 息等现代光学技术的不断发展以及它们与电子技 术 、计算机技术等日益密切的结合 ,使得光电子技术 在侦察 ,测距 、火控 、导航 、制导 、指挥 、控制 、通讯等 军事领域的应用日益广泛 。精确测距 、精确制导的 导弹 、炮弹和炸弹等武器 ,攻击目标广 ,命中精度高 , 是现代战争中的重大威胁力量 。预计激光测距以及 激光武器将是未来战略威胁力量的一个重要组成部 分。
激光测距系统进一步发展的主要环节应该是以 下几个方面 :一是大视场 ;二是由于激光束的漂移 , 加之激光束的发散角极窄 ,因而难以捕获目标 ,为此 必须解决激光束稳定问题 , 所以采用高稳定度的 CO2 激光器 ;三是频移调制器 ;四是快速扫描的双轴 机械扫描器 。
参考文献
[ 1 ] 张承铨. 国外军用激光仪器手册. 兵器工业出版社 ,1989 [ 2 ] Dang K V , Kauff man1CL ,Derzko ZI1SPIE ,1992 ,1686 [ 3 ] 贺安之 ,阎大鹏. 激光瞬态干涉度量学. 机械工业出版社 ,1993
激光测距系统方案

远距离激光测距系统方案一、激光的基本特点:激光亮度高的一个原因是,激光束的面积比普通光源的发光面积小得多。
激光的发散角是普通光源的几百万分之一,由于激光的能量在空间上高度集中,从而提高了亮度。
激光亮度高的另一个原因是,采用了压缩发射时间的方法来提高瞬时发射功率。
以一般脉冲工作的激光器,输出一个脉冲的持续时间可短至几十毫微秒。
如果输出一个脉冲的能量为0.1焦耳,则激光功率可达到千万瓦。
采用特殊的脉冲压缩技术,还可把脉冲时间压缩到数纳秒,使激光功率达到万亿瓦。
所以说激光是在受激辐射过程中产生并被放大了的光。
这一现象最早是由著名科学家爱因斯坦在1916年首先发现的。
光的受激辐射理论的提出,为激光的发明定了理论基础。
1960年7月,美国休斯公司实验室从事红宝石材料研究的年轻科学家梅曼,发明了世界上第一台红宝石激光器。
这之后不同类型的激光器便接二连三地发明出来。
目前激光技术已经渗透到侦察、通信、武器制导和定向能武器等各个军事领域。
二、激光测距基本原理激光测距就是利用激光的单色性和相干性好、方向性强等特点,以实现高精度的计量和检测,如测量长度、距离、速度、角度等等。
地址:深圳市高新技术产业园中区深圳软件园4栋522室激光测距在技术途径上可分为脉冲式激光测距和连续波相位式激光测距。
脉冲式激光测距原理与雷达测距相似,测距仪向目标发射激光信号,碰到目标就要被反射回来,由于光的传播速度是已知的,所以只要记录下光信号的往返时间,用光速(30万千米/秒)乘以往返时间的二分之一,就是所要测量的距离。
现在广泛使用的手持式和便携式测距仪,作用距离为数百米至数十千米,测量精度为五米左右。
我国研制的对卫星测距的高精度测距仪,测量精度可达到几厘米。
连续波相位式激光测距是用连续调制的激光波束照射被测目标,从测量光束往返中造成的相位变化,可换算出被测目标的距离。
为了确保测量精度,一般要在被测目标上安装激光反射器。
它测量的相对误差为百万分之一。
光电经纬仪中激光测距装置光学系统的设计
·878 ·
《半导体光电》2007 年 12 月第 28 卷第 6 期
孙芳方 等 : 光电经纬仪中激光测距装置光学系统的设计
定的发散角 ,如不加任何光学系统向空间发射 ,到达
远处目标的光斑直径就很大 ,单位面积上的能量就
小 ,这样会影响接收装置的接收能量 ,从而影响测距
精度 。例如 :发散角为 120"时 ,光束到达 5 km 处的
光斑直径 r 为 5 ×103 tan 120" ≈5 ×103 ×0. 6 ×10 - 3
接收光学系统口径为 1 000 mm ,焦距为 10 000 (回波接收小系统) ,视场 2 w = 6′。
在接收装置中设计有一些特殊的光学元件 ,这
·879 ·
SEMICOND UCTOR OPTOEL ECTRONICS Vol. 28 No. 6
些元件可以提高激光测距系统的性能 ,提高接收机 的灵敏度 ,增大作用距离 ,提高瞄准跟踪精度 ,扩大 增益范围 ,减小体积和增加设计的灵活性 。
摘 要 : 阐述了在光电经纬仪上应用激光测距装置的重要性 ,即可实现单台经纬仪确定目标 位置 。分析了激光测距的原理及测距方程 ,最后针对光电经纬仪的结构特点 ,对测距装置的光学系 统进行了设计 。
关键词 : 光电经纬仪 ; 激光测距 ; 发射光学系统 ; 接收光学系统 中图分类号 : TN249 文献标识码 : A 文章编号 : 1001 - 5868 (2007) 06 - 0878 - 03
激光测距高速采集和处理电路的设计
激光测距高速采集和处理电路的设计周少杰【摘要】针对激光测距仪经典接收方法,设计了一种高速数字化采集电路.论文采用ADC+FPGA+DSP的设计方案,具有可调分辨率,最小分辨率可达0.3mv.详细介绍了电路的具体设计方法.对脉冲信号进行测量,结果表明该方案可行.【期刊名称】《机电产品开发与创新》【年(卷),期】2014(027)003【总页数】3页(P132-133,124)【关键词】激光测距;高速ADC【作者】周少杰【作者单位】华中光电技术研究所武汉光电国家实验室,湖北武汉430223【正文语种】中文【中图分类】TP274激光测距仪是利用激光良好的准直性及非常小的发散角度来测量距离的一种仪器。
但目前激光测距仪主要采用脉冲法进行测距,通过测量激光器发出光脉冲的时刻与光脉冲到达目标并由目标返回接收机的时间差计算出目标距离。
准确判断回波的到达时刻是测距的关键。
激光测距仪经典信号检测一直采用模拟电路来完成,主要利用分离元件和小规模集成电路对回波进行放大、滤波、阈值触发、整形,在信噪比较大的条件下,能够准确的判断回波到达时刻,当信噪比变小时,由于噪声的干扰,回波到达时刻就难以确定。
近年来随着高速AD、存储器以及高速并行处理器的飞速发展,为回波检测提供了新的方向。
本文提出了一种激光测距的数字化方案,它采用以高速数字采集为核心的数字化接收电路,利用高速FPGA进行数据存储和信号控制,最后利用DSP进行处理以实现回波信号检测。
1.1 电源设计高速电路板设计的一个重要的考虑就是电源的设计和网络分配。
电源的设计是选择合适的电源芯片,满足电压强度、电压纹波以及电流强度的要求。
电源的网络分配必须为高速电路板上各部分的电路提供一个低噪声的电压信号,包括VCC和接地匹配。
电源分配网络同时还得为电路板上所有产生或接受的信号提供一个信号回路,合理的分配电源层和地层可以有效减少电磁干扰。
本电路采用5V供电,采用线性稳压芯片对各电源单元供电,对重要电源增加滤波电路设计。
激光测距的高速采集与处理电路的设计
(上接第98页)
2 DsP软件实现
激光测距算法的实现在DSP上完成。上电后,DSP 进行初始化配置,将CPU的工作时钟配置为300 MHz, EMIF端口的时钟配置为75 MHz,初始化完成后打开 INTO中断,进入等待状态。FPGA产生一个触发信号, 触发ADC开始采样,该触发信号的反向信号触发DSP的 INT0中断,DSP响应该中断请求,从FIFO中读取数据 到内部RAM中,如判断为无回波信号,进入等待状态, 如判断为有回波,用二进小波法计算出目标距离。
Keyworfls:laser range finding;high-speed acquisition;ADC;FPGA;DSP
0引 言
率只需要125 MHz,这样就可以利用低端FPGA内部资源 构造的FIFo来完成高速数据接收的任务,实现数据的降
激光测距仪是利用激光良好的准直性及非常小的发 散角度来测量距离的一种仪器。但目前激光测距仪大都
(下转第107页)
万方数据
王富民等:基于CF卡的无线胶囊内窥镜体外接收存储系统
激光测距仪的设计
分类:工业控制类(TMS320C2000),低功耗类 ( TMS320C55x ),浮点类( TMS320C67x ), 高速类( TMS320C64x)
选择原则:应用场合、算法的复杂度、功耗的要求
西安电子科技大学 综合开发应用实验室
单元电路设计—微处理器的选择
常用处理器分类及其特点: CPLD、FPGA:
V170~45来自81~2(低) 3.5~11
静态电流 (μA)
0.25~5
响应速 度
20ns
西安电子科技大学 综合开发应用实验室
单元电路设计—小信号放大
常用模拟开关--CD4051 特性:单刀多掷,模数信号均能传输,300欧姆,600ns
西安电子科技大学 综合开发应用实验室
单元电路设计—小信号放大
数控电位器
分类:按键式和串行总线式,其中串行总线控制又分为三 线控制、I2C接口控制和SPI接口控制。
西安电子科技大学 综合开发应用实验室
单元电路设计—小信号放大
数控电位器—x9c102/ x9c103/ x9c503/ x9c104 特性:三线控制,100档可调
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4
机械结构设计
在进行接收光路机械结构设计时, 首先要满足光学
系统中光学元件的空气间隔和排布要求, 并在此基础上 保证机械结构具有足够的刚度和强度, 保证光学系统在 调试过程中的便捷性, 接收望远系统中, 主光学系统是最重要的组成部 分, 其成像质量的好坏, 直接影响第一像面后各光学系统 , 的成像质量 而对主光学系统光学元件 ( 即主镜和次镜 )
第 11 期
韩光宇 等: 卫星激光测距中接收光路光机结构设计
2427
的机械支撑, 是至关重要的。 为了减小温度梯度对主镜面形精度的影响, 主镜选 用热膨胀系数较小的微晶玻璃, 通光口径是 1 000 mm。 如图 4 所示。在工作过程中, 主镜需要围绕旋转轴 O 相 对于重力场在 俯 仰 角 α = - 90° ~ 90° 范 围 内 作 相 对 运 控制主镜上力的分布, 动。要设计合理的机械支撑结构, 当重力方向相对与主镜发生变化时, 使光学表面变化最 小, 主镜面形精度最好。根据主镜的运动方式, 通常设计 轴向支撑和径向支撑组合的方式; 当 α = 成中心轴定位, 0° 时, 只有轴向支撑起作用, 当 α = 90° ( 或 - 90° ) 时, 只 有径向支撑起作用, 当 α 在其他角度时, 两种支撑同时起 。 作用
当望远系统接收口径选取 1 000 mm 时, 对于 GEO 和 IGSO 卫星, N s = 4. 4 光电子; 对于 MEO 卫星, N s = 18. 5 光电子。 由于 GEO 卫星距离地面的高度为 36 000 km, 从卫 星返回地面的激光非常微弱。所以要求光电接收转换器 件必须具有极高的灵敏度和极快速的响应特性。 目前国 内外常用的是带有时间游动补偿功能的单光子雪崩二极 SPAD 作为光电接收探测器, 管 C通过采取有效抑制背 提高信噪比等措施, 可以满足测距要求。 景噪声, 3. 2 焦距选择 根据三路光学系统所选用的光电探测器接收靶面尺 利用式( 2 ) 计算各路光学系统的焦距: 寸, f ' = φ / 2tan ω ( 2)
3
光学系统方案设计
根据技术要求可知, 接收望远系统需要具备卫星激 卫星跟踪和白天光束监测能力。 因此需要设计 光测距、 3 个光路, 分别完成相应的功能。 3. 1 接收望远系统口径确定 根据常用的激光雷达测距方程: 16 ESA S A r K t K r T2 ηα NS = 2 2 2 4 π θt θs R
式中: f ' 为光学系统焦距 ( mm) , φ 为探 测 器 靶 面 大 小 ( mm) , ω 为有效视场角( rad) 。 经过计算可确定, 激光测距 接收系统焦距 4 000 mm, 卫星跟踪系统焦距 8 000 mm, 白 天光束监测系统焦距 8 250 mm。 3. 3 光学系统设计 根据 SLR 接收光学系统的技术要求, 需要采用主系 统光谱分光的方式, 又由于每一路光学系统的探测器尺 寸和焦距 不 同, 要采用二次成像的方式才能满足使用 。 要求 经过计算可知, 接收望远镜的光学系统是长焦距、 大 主光学系统必须采用反射式结构形式。 口径的光学系统, 常用的反射式主要有 2 种结构: 卡赛格林式和牛顿式。 在卡赛格林式光学系统中, 光学元件均采用非球面, 不利 于加工和装调, 但是具有仪器结构紧凑, 回转半径和转动 惯量小的优点。 牛顿式结构有光学元件易于加工的优 但是系统结构相对庞大, 回转半径和转动惯量均较 点, 大。根据本 项 目 的 实 际 要 求, 选用卡赛格林式主光学 系统。 从图 1 可以看到, 主光学系统采用卡赛格林式结构, 在第一像面前采用分光棱镜进行光谱分光, 其中大部分 的波长为 532 nm 的激光回波透射过分光棱镜进入激光 测距系统; 激光测距系统成像质量如图 2 所示。 其余波 段的可见光和少量剩余的激光回波反射进入卫星跟踪系 统, 卫星跟踪系统成像质量如图 3 所示。 当需要白天进
Optomechanical structural design of receiving optomechanical system in SLR
2 2 2 Han Guangyu1, ,Zhang Guoyu1 ,Cao Lihua1, ,Chen Ning2 ,Yu Xiaobo1,
( 1 Changchun University of Science & Technology,Changchun 130022 ,China; 2. Changchun Institute of Optics, Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033 ,China)
( 1)
E 为发射 式中: N S 为接收探测器接收到的平均光子数, S 为每焦耳能量的激 光 所 含 光 子 的激光脉冲能量 ( J) ,
2 A r 为接收望远镜 数,A S 为卫星反射器的有效面积 ( m ) , 2 K r 为接收光学系统的效率, Kt 发 的有效接收面积 ( m ) ,
行激光测距时, 将反射镜、 恒温槽和窄带滤光片切入激光 测距系统的光路里, 经过反射镜, 将接收的激光回波反射 到白天光束监测系统。窄带滤光片是白天测距能否实现 的关键器件, 工作时将其放置在恒温槽内, 保证透射过窄 带滤光片的激光的中心波长保持恒定; 当调整好激光发 SPAD 接收激光 射光束时, 迅速将反射镜退出光路, 由 C回波, 实现白天测距。
04 收稿日期: 2011Received Date: 201104
1
引
言
常数, 精密卫星定轨, 确定地球和海洋潮汐变化的规律等 方面都具有重要作用。 例如重力场方面, 由全球几十个 跟踪站对 LAGEOS 卫星的联测, 精化了表征地球的形状 和大小的参数以及地心引力常数等; 在地球自转方面, 确
第 11 期
第 32 卷 第 11 期 2011 年 11 月
仪
器
仪
表
学
报
Chinese Journal of Scientific Instrument
Vol. 32 No. 11 Nov. 2011
卫星激光测距中接收光路光机结构设计
1, 2 1 1, 2 韩光宇 ,张国玉 ,曹立华 ,陈 2 1, 2 宁 ,于晓波
Abstract: In satellite laser ranging,tracking satellite and laser ranging need to be done simultaneously. In order to realize allweather ranging,exploring daytime laser ranging is of great importance. In the ranging of MEO and GEO,the energy of the reflected laser is quite little,so largecalibre receiving telescope is used. In the project of developing a certain model satellite ranging system,to ensure the successful ranging of MEO,GEO and IGSO,a 1 000 mm primary optical system is used. Through splitting the spectrum with a dispersion prism in front of the first image plane,tracking satellite and laser ranging are done simultaneously,and the daytime light beam monitoring optical system is expanded and the system is capable of allweather ranging. Experiments show that this optical system has good image quality,and reasonable and compact mechanical structure,which achieves the purpose of ranging MEO and GEO. Key words: optical system; SLR; primary mirror bracing
的 SLR 站点共有 40 多个地面站分布在世界各地。 SLR 是一种重要和实用的技术。 它对于检测大陆板块移动、 地壳形变、 地球自转和极移, 改进地球重力场和地心引力 美国航空航天局在 1964 年 10 月发射了第一颗带有 B 卫星, 激光反射镜的 BE并成功地首次测定了地球和 该颗卫星之间的距离, 开创了地球对卫星激光测距 ( satellite laser ranging, SLR) 的新纪元。 目前, 包括我国在内
2
主要技术要求
根据 SLR 系统的总体技术指标要求, 激光接收光学 系统需要接收卫星角反射器反射回来的激光脉冲 ( 波长 532 nm) , 其中绝大部分的激光回波进入测距光路, 完成 GEO 和 IGSO 卫星的测距。 剩余部分的激光回 对 MEO、 波和可见光其他波段进入卫星跟踪光路, 用来进行跟踪 卫星和监视发射光束。同时利用此系统探索白天激光光 束监测和白天测距。
韩光宇 等: 卫星激光测距中接收光路光机结构设计
2425
定地球自转参数, 精度和分辨率都比用经典技术的测定 提高了很多倍。 利用 SLR 精确测定极移两分量和地球 自转速率变化或日长变化, 其精度分别达到 0. 1 毫角秒、 0. 2 毫角秒和 0. 05 毫角秒。 SLR 的原理是测量激光脉冲根据地面参考点到卫星 从而计算出卫星到地面参考点的 之间的往返时间间隔, 距离。具体讲, 首先地面跟踪站的计算机系统根据预报 准确计算出卫星的位置, 通过伺服控制系统驱动望远镜 跟踪卫星, 激光器通过望远镜上的激光发射光路发射脉 冲激光, 卫星上的后向反射器将激光反射, 并由望远镜接 收光路接收脉冲激光, 与此同时, 时间间隔计数器测出激 以此时间乘以光速, 即可精确地计 光脉冲往返时间间隔, 算出卫星到地面跟踪站的距离。 由此可见, 在 SLR 的光机系统中, 激光发射光路和 接收光路是其 2 个重要的组成部分。 在激光接收光路 中, 常采用大口径的望远系统接收由卫星反射回来的激 光脉冲, 口径越大, 接收能量就越多, 探测距离也就越远。 本文根据研制的某激光测距项目具体任务要求, 对 激光接收光路的光机结构设计进行了较为详细的论述。