三相SPWM逆变器
基于DSP技术的三相逆变电源之SPWM原理简析
基于DSP技术的三相逆变电源之SPWM原理简析
DSP 技术芯片的出现极大的改善了开关电源的研发和设计思路,也为工程师的研发工作提供了诸多便利。
在今明两天的方案分享中,我们将会为大家分
享一种基于DSP 技术的三相逆变电源设计方案。
在今天的分享中,我们首先就这一三相逆变电源的SPWM 调制原理进行简要介绍和分析。
在本方案所设计的这一基于DSP 技术而研制的逆变器电路中,核心部分主要采用的是美国TI 公司生产的TMS320LF2407A DSP 芯片。
在确定了DSP 技术芯片的核心控制理念后,接下来我们就能够根据数字控制思想构建通用的变
换器系统平台。
此变换器平台硬件上具有通用性,不仅适用于500W 的三相逆
变电源,对于输出性能有不同要求的逆变器,只需对软件进行修改即可满足要求。
本方案的设计指标为输入电压220V(AC),输出电压110V(AC),频率
50Hz,输出功率500W,输出电流4.5A,输出总谐波因数(THD)2%。
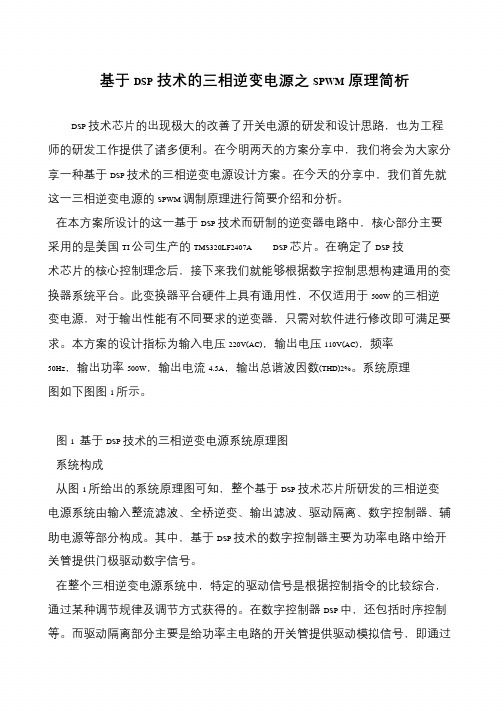
系统原理图如下图图1 所示。
图1 基于DSP 技术的三相逆变电源系统原理图
系统构成
从图1 所给出的系统原理图可知,整个基于DSP 技术芯片所研发的三相逆变电源系统由输入整流滤波、全桥逆变、输出滤波、驱动隔离、数字控制器、辅
助电源等部分构成。
其中,基于DSP 技术的数字控制器主要为功率电路中给开关管提供门极驱动数字信号。
在整个三相逆变电源系统中,特定的驱动信号是根据控制指令的比较综合,
通过某种调节规律及调节方式获得的。
在数字控制器DSP 中,还包括时序控制等。
而驱动隔离部分主要是给功率主电路的开关管提供驱动模拟信号,即通过。
三相SPWM逆变器的调制建模和仿真
teiv r rT ru hteu eo t b/ i l ka dP w rS se B o k ( S )p we s m lc s t o lo i lt n h e e. h o g s fMal n t h a Smui n o e ytm lc n PB o r y t bo k e ob xs s e T muai o
到 最 终 实现设 计要 求 的 可 视 化 桥 梁 。 被 广 泛 应 用 于 线 性 系统 、 线 性 系统 及 数 字 信 号 处 理 的 建 模 和 仿 真 中。 非 关键 词 : P S WM; 三相 逆 变 器 ; t bSm l k 仿 真 Ma a /i ui ; l n 中 图分 类 号 : M4 4 T 6 文 献 标识 码 : A 文 章编 号 :1 7 — 2 6 2 1 ) l 0 3 — 3 6 4 6 3 (0 3 0 一 12 0
( lc o iI om t nSh o, aguU ie o cec n ehooy Z ejag2 2 0 ,C ia Eet nc n r ai c olJ ns nvr fSinead Tc nl , h n n 1 0 3 hn ) r f o i s g i
Ab t a t h s p p rb e y d s r e h o k n rn i l fte t r ep a e S W M n et rb h i lt n o r e sr c :T i a e r f e c b d te w r i g p i c pe o h e - h s P i l i h - i v r y t e smu ai ft e 。 e o h _ p a eS W M v r r D s r e ei p t n u p t h r c e s A ay i d t e c a a tr f h ot g n u r n h o g h s P i et . e c i d t u d o t u a a t r. n lss h h r ce so e v l e a d c re t r u h n e b h n a c e t a t
三相多电平电流型逆变器载波相移SPWM技术
批注本地保存成功开通会员云端永久保存去开通
维普资讯
第 4 卷 第 5期 1
20 0 o rE e to is
Vo.1.N . 1 4 o5
Ma 2 0 y, 0 7
三相多电平电流型逆变器载波相移 S WM 技术 P
载 波相 移 S WM( P —P P C SS WM) 术 是 自然采 样 技 S WM 技术 与 多 重化 结 构 的 有机 结 合 。 技 术 具 有 P 该
等 效开 关频 率 高 , 关损 耗 小 , 态 响 应 快 , 输 频 开 动 传
行性。 并给出了具体的实现方法 。
2 拓 扑 结构 及 其 工作 原 理
F u d t nP oetS p o e yN t n a rl c n eFu dt no hn N . 4 7 3 ) o n ai rjc :u p r db a oa N t a Si c on a o f ia( o5 7 0 3 o t il u e i C 0
1 引 言
关键词 : 逆变器 ;载波;脉宽调制 / 移相 中图分类号 :M4 4 T 7 7 T 6 ; N 8 文献标识码 : A 文章编号 :0 0 10 2 0 )5 02 - 2 10 - 0 X(0 7 0 - 0 9 0
Re e r h o S S s a c n CP . PW M c nq ei r ep a e M u t e e I Te h i u Th e - h s li v lCS n l
工程师分享:SPWM逆变器死区影响的几种补偿方法

工程师分享:SPWM逆变器死区影响的几种补偿方
法
引言
死区可以避免因桥臂开关管同时导通的故障,但死区同时也引起反馈二极管的续流,使输出电压基波幅值减小,并产生出与死区时间△t及载波比N成比例的3、5、7…次谐波,这是设置死区带来的缺点。
这个缺点对变频调速系统的影响最为显着。
特别是在电机低速运行时,调制波角频率ωs减小,使载波比N相对增大,因此,死区△t中二极管续流引起的基波幅值减小,和3、5、7…次谐波的增大更加严重。
在这种情况下,为了保证系统的正常运行,就必须对死区中二极管续流的这种不良影响进行补偿。
常用的最基本补偿方法有两种:一种是电流反馈型补偿,另一种是电压反馈型补偿。
它们的共同补偿原理就是设法产生一个与二极管续流引起的误差电压波形相似、相位相差180°的补偿电压ucom,来抵消或减弱误差波的影响。
所谓误差波,就是由反馈二极管续流而引起的误差电压。
三相半桥式SPWM逆变器电路图见图1。
电流反馈型补偿
死区设置方式有两种,即双边对称设置和单边不对称设置。
现以双边对称设置方式为例来进行说明,其结果对单边不对称设置方式也同样适用。
带死区的SPWM逆变器在感性负载时,基波幅值的减小与3、5、7…次谐波幅值的增大都与Δtωc=ΔtNωs成正比(ωc为SPWM中三角波电压的角频率),随着死区时间△t及载波比N的增加,输出电压基波幅值将减小,3、。
三相PWM逆变器

1.0 (ULLm)h/Ud
0.8
0.6 0.4
2mf+1
0.2
0.0 1
mf
Ud t
Ud t
基波ULL1
Ud
t
ma=0.8,mf=15
2mf+1
3mf+2
2mf
3mf
三相逆变器的线电
压波形中可以消除单 桥臂逆变器中主要的 谐波成分。
逆变电路
u
utri uctr.A
uctr.B
uctr.C
0
t
uAN 0 uBN 0 uAB=uAN-uBN 0
uctr.B
uctr.C
U
Uctr
Utri 1/fs
0
t
0
t
uAN
UA0
t=0 UA0_1
0 uBN
Ud t
0
Ud /2t -Ud /2
0 uAB=uAN-uBN
Uctr<Utri TA -: 通,TA+: 断 Uctr>Utri TA+: 通,TA-: 断
0
基波ULL1
Ud t
Ud
t
桥臂输出中基波分量的电压峰值为:
0 uAB=uAN-uBN 0
1.0 (ULLm)h/Ud
0.8
0.6 0.4
2mf+1
0.2
0.0 1
mf
逆变电路
uctr.B
uctr.C
t
Ud t
Ud t
基波ULL1
Ud
t
ma=0.8,mf=15
2mf+1
3mf+2
2mf
3mf
假设mf为奇数,则
三相三线制SPWM逆变器死区效应分析

An l sso a tm e e e tf r t e - a y i fde d- i f c o hr e pha e t e -wi e s hr e r
S PW M n e t r i v re
L N a I Zh o,MA o,YI Yi d ,W ANG a — u Ha N — i Xio r i
文献 [ ] 出了死 区时间对逆变 器产生 的谐 波 1给
影 响 的 数 学 模 型 , 低 次 谐 波 的 变 化 规 律 进 行 了理 对 论 分 析 和仿 真 。文 献 [ ] 过 建 立 数 学模 型 , 输 出 2通 对 电压 基 波 进 行 了定 量 的 分 析 和 实 验 , 是 对 于 谐 波 但 的 影 响并 没有 给 出相 应 的理 论 曲线 和 实验 曲线 。文
厂— ]
一
图 3 基 波 周 期 内逆 变 桥输 出 电压 电流
]
:
厂
:
功 率 因数 角 ; 一 理 想 P M输 出的 基 波 分 量 ; 一 死 。 W
区 引起 的 电压 变化 ; 一 其 基 波 分 量
( )理 想 门极 驱 动 信 号 a
可见 , 。 的存 在 会 对 输 出 电压 基 波 分 量 的 幅值 和相 位产 生影 响 。
( e at e t f l t ncE g e r g h j n nvri , a gh u3 0 2 , hn ) D p r n o e r i n i ei ,Z e a gU iesy H n zo 1 0 7 C ia m E co n n i t
Ab t a t s r c :Ai n tt e d a - i f c a s d b h e d t , u h a h n u n e o u d me t l v ft e o t u ot g n mi g a h e d t me ef tc u e y t e d a i e me s c st e i f e c n f n a n a l wa e o u p tv l e a d h a lw a mo i c n e t a mah ma ia d lwa sa ls e . h ea in hi sa ay e ew e h e d tme ef c n e d t , o h r n c o t n , t e t lmo e se tb ih d T e rl t s p wa n l z d b t e n t e d a — i f ta d d a i c o e me mo u a in c e ce t s i h n r q e c n o e a t r a ge o i e e tc n i o s d t i d y T e smu a in wa a r d o ti d l t o f i n , w t ig fe u n y a d p w r f co n l n df r n o d t n eal l . h i l t s c ri u n o i c f i e o e Mal b, n h x e me twa r c e e n a 3 k h e - h s h e - r n e tr T e te r t a n l sss o h td a i a t a a d t e e p r n s p o e d d i W t r e p a e tr e wi i v r . h h o e i la ay i h wst a e d t i e e c me c n r d c h u p tv h g u d me t mp i d n n r a e t e lw a mo i o t n . h o e ia u v sc i c d t t n u v s o e u e t e o t u o a e f n a n a a l u e a d i c e s h o h r n c c n e t T e r t l r e o n i e wi f t g c r e f l t c c hi i smu ain, x e i n a a a b sc l , h c e f s t e c re t e s o h t e t a d la d i h s c r i e e e c in f a c i lt o e p rme t d t a ial w ih v r e h o r c n s ft e mah mai lmo e n t a e a n r f r n e sg i c n e l y i i c t i f rt e d sg fS W M n e tr o eino P h iv r . e Ke r s h e — h s h e — ie P M n e e ;d a — i fe t y WO d :t r e p a e t r e w r ;S W iv r r e d t t me efc
三相电压型SPWM逆变器的仿真
(2)逆变电源输出的线电压Vab-inv;
(3)加在负载上的线电压Vab-bad
从波形图上可以看出,负载电压非常接近正弦波,这是由于LC滤波器大大减少了逆变电源输出电压的谐波。
为了对输出特性进行分析,在仿真结束后,利用快速傅里叶变换(FFT)对上述3个电压波形的谐波成分进行分析,它们各次谐波含量如图(6)所示。
Matlab软件具有强大的数值计算功能,本文利用Matlab软件中的Simulink和Power System Blochset建立位一个三相电压型SPWM逆变电源建立系统仿真模型,并对其输出特性进行仿真分析。
二、工作原理
三相电压型SPWM逆变电源系统的原理,如图(1)所示。
它的主要功能是将直流电压变换成交流电压,采用SPWM控制策略,调压控制器采用数字式PI控制,实时地调节逆变输出电压的幅值,以满足实际的要求。系统的主回路选择IGBT作为开关器件,为了减少输出电压的谐波,逆变电源输出接有串联谐振滤波电路。
参考文献:
(1)洪乃刚.电力电子、电机控制系统的建模和仿真【M】.北京:机械工业出版社
(2)王云亮,周渊深,舒志兵.电子技术【M】.北京:电子工业出版社
(3)钱平,孙国琴,胡春慧.交直流传动控制系统【M】.北京:高等教育出版社
(4)王兆安,黄俊.电力电子技术【M】.4版.北京:机械工业出版社
(5)李华德.交流调速控制系统【M】.北京:电子工业出版社
三、系统仿真模型的建立
利用Matlab软件中的Simulink和Power System Blochset构建三相SPWM逆变电源的电路模型,如图(2)所示。
这一系统是由AC-DC和DC-AC两部分组成,60HZ的交流电通过整流器送到逆变器,再由逆变器的输出经过LC滤波器供电给一个交流负载6路IGBT模块选用PSB库的子库Power Electronics中的UniversalB属性Power Electronics Device改为IGBT/D DDE即可。其他的参数可以根据自己的实际需要来设置。模型中关键点的部分就是电压调节系统,模型如图(3)所示。
三相逆变器电流计算

三相逆变器电流计算三相逆变器是一种常用的电力转换装置,主要用于将直流电转换为交流电。
在三相逆变器中,电流的计算是一个重要的问题。
本文将介绍三相逆变器电流计算的方法和相关知识。
我们需要了解三相逆变器的基本原理。
三相逆变器由三个独立的逆变器组成,分别控制三个相位的输出。
每个逆变器由一个开关器件和一个滤波电容组成。
当开关器件导通时,电流通过滤波电容,并输出到负载上。
当开关器件关断时,电流停止流动,但滤波电容上的电荷仍然存在,维持输出电压。
在三相逆变器中,电流的计算可以通过欧姆定律来实现。
根据欧姆定律,电流等于电压除以阻抗。
在逆变器中,输出电流取决于负载的电阻和输出电压。
通常,负载的电阻是已知的,因此我们只需要计算输出电压。
输出电压的计算涉及到逆变器的工作原理和控制方法。
常见的控制方法有PWM(脉宽调制)和SPWM(正弦脉宽调制)。
在PWM 控制下,逆变器的开关器件周期性地开关,以产生等效的交流输出电压。
而在SPWM控制下,逆变器的开关器件根据输入的正弦信号进行开关,以产生接近正弦波形的输出电压。
在进行电流计算时,需要考虑逆变器的效率和损耗。
逆变器的效率表示输出功率与输入功率之间的比例关系。
损耗主要包括开关器件和滤波电容的损耗。
在实际应用中,我们需要考虑逆变器的效率和损耗对电流计算的影响。
除了欧姆定律和控制方法,还有其他因素会影响三相逆变器电流的计算。
例如,输入电压的波形和频率、负载的特性、逆变器的容量等。
这些因素需要在具体的计算中进行考虑,以得到准确的电流值。
在实际应用中,三相逆变器电流的计算是非常重要的。
准确计算电流可以帮助我们评估逆变器的性能和选择适当的控制方法。
此外,电流计算还可以用于保护逆变器和负载,避免电流过大导致设备损坏。
三相逆变器电流的计算是一个复杂的问题,涉及到多个因素和方法。
在实际应用中,我们需要综合考虑这些因素,采用合适的计算方法,以获得准确的电流值。
只有通过准确的电流计算,我们才能实现逆变器的正常工作和性能优化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第四章三相SPWM逆变器
4.1三相SPWM逆变器的结构
SPWM逆变器与PWM逆变器在主电路方面没有本质的区别,将电压型PAM主电路结构中的晶闸管替换为IGBT就成了SPWM型逆变器的主电路结构。
SPWM脉宽调制时,瞬时电压以极高的速度切换方向而输出半波内不改变方向,因此,输出电压与输出电流常常方向不一致,这时就需要续流二极管来提供与电压极性相反的电流通道。
加上了续流二极管的三相逆变桥,我们就设计好了SPWM逆变器的基本主电路。
图4.1是SPWM逆变器的主电路结构,它由六只IGBT组成三相桥式结构,每个桥上反并联了续流二极管。
4.1 SPWM逆变器的主电路图
IGBT器件有自己特有的驱动电路及保护电路,实际中IGBT通常不以单独的形式供货,而是以包括了驱动及保护电路的智能模块(IPM)方式提供的。
IPM不仅为IGBT器件提供了驱动电路及保护电路,也为整个模块提供了过热保护等。
在容量比较小的情况下,IPM常常做成多器件结构,例如六单元或七单元结构。
六单元结构集成了一个完整的SPWM逆变器,图4.2就是一个六单元IPM的结构示意图。
七单元IPM除一个逆变器外,还把能耗制动用的斩波元器件及附属电路集成在里边了。
4.2 IPM结构
从图4.2看到,六单元模块为五个主电路端子,即直流正负极输入和交流三相输出端子。
另外有驱动和保护的控制端子若干,它们是能够和常规控制芯片直接连接或者通过光耦合连接的电压型接口。
驱动端子是输入端子,接受外部触发器件,保护端子是输出端子,在保护电路封锁驱动电路的同时发出保护动作信号给外部控制器。
主电路端子通常是接线桩形式,控制端子通常是集中插口形式。
七单元IPM增加了一个连接制动电阻的主电路端子及相应的控制端子。
当容量比较大时,如果IPM仍然集成整个逆变器,会产生两个方面的缺点:一是模块的体积和重量加大,给安装和布置带来困难,也不利于散热;二是当模块中局部元器件损坏时需要更换整个模块,而大容量的模块的成本必然更高,因此使维护成本增加了。
所以,容量比较大时,IPM以两个或者一单元的形式提供。
两单元IPM包括一个逆变桥臂的所有器件,即两个IGBT、续流二极管、驱动及保护电路。
一单元IPM包括一个IGBT和它的续流二极管、驱动及保护电路。
逆变器的输出主电路中,还需要连续用于限制电压变化率的缓冲电路。
IGBT的驱动电路、保护电路以及包括缓冲电路在内的其他附加辅助电路的具体接线原理。
4.2异步电动机按磁通定向的矢量控制原理
一、电动机合成磁通势及磁链
合成磁通势及磁链是指气隙合成磁通势和气隙磁链。
如果计及定转子绕组漏磁影响,还有另外两个合成磁通势和磁链:定子合成磁通势和定子磁链;转子合成磁通势和转子磁链,三种合成磁通势和磁链定义如下。
(一)气隙磁链
是定子、转子通过气隙相互交链的那部分磁链:
= +(4-1)
式中:为定、转子绕组之间的互感;为由定子电流产生,穿过气隙与转子绕组交链的那部分磁链;
为由转子电流产生,穿过气隙与定子绕链的那部分磁链。
是由气隙合成磁通势产生的。
(二)定子磁链
是气隙磁链与定子漏磁链之和。
= + = ++
=+(4-2)
式中:为定子绕组漏感;为定子绕组全电感,=+;为定子电流产生的全部磁链。
是由定子合成磁通势产生的。
(三)转子磁链
是气隙磁链与转子漏磁磁链之和。
= += ++
=+(4-3)
式中:为转子绕组漏感;为转子绕组全电感,=+;为转子电流产生的全部磁链(包括漏磁链)。
是由转子合成磁通势产生的。
根据上述分析结果,可以作出磁链方向图,如图4-3所示。
、、均可以同步角速度旋转。
二、异步电动机定转子绕组中的感应电动势
通常异步电动机矢量控制系统是以转子磁链为基准,即磁链位置位于轴上。
(1)气隙磁链在定子绕组中感应出定子电动势:
(4-4)
(2)定子磁链在定子绕组中感应出定子全电动势:
dt
s d ss e ψ=
(4-5)
dt
di l e
e s
s a
s ss
σ
+=. (4-6) (3)气隙磁链在转子绕组中感应出转子电动势:
dt
d e s
rs
ψ-= (4-7)
(4)转子磁链在转子绕组中感应出转子全电动势:
dt
d e r
rr
ψ-= (4-8)
dt
di l e
e r
r a
r rr σ
-=. (4-9) 转子电动势rr e 、ra e 的计算是在转子位子d-q 坐标系进行,因为转子绕组本身是以角速度
r ω旋转的。
在磁链幅值不变的情况下,上述各电动势矢量分别垂直与各自的磁链矢量,矢量图如4-3所示。
若磁链幅值变化,电动势中除上述垂直分量外,还要增加与磁链平行的分量。
在d-q 坐标系中,磁链矢量r ψ的表达式为:
l j r e ϕψ=ψ (4-10)
式中:ψ为r ψ的幅值;
ωϕ∆=dt
d l
,ω∆为转差角速度。
将式(4-10)代入式(4-8),得:rr
rr j r rr
e e dt
e d e l 21)(+=ψ-=ϕ l
j r rr e dt
d e
ϕ.1
ψ-= (4-11)
)
90(20..-ψ∆=l j r rr
e
e ϕω
式中:rr
e 2为r ψ值变化引起的变化电动势,与r ψ反向;rr
e 2为旋转电动势,比r
ψ滞后0
90。
三、转子电流矢量
在图4-3中,由于转子漏磁链已被包含在r ψ中,所以电流矢量为: rr
r
r
e r i 1=
(4-12) 式中:r r 为转子电阻。
对应与(4-12),r
i 也可以分解为两部分: l j r rr
r
r
e i e r i ϕ1111-==
)90(22201-==
l j r rr r
r e i e r i ϕ (4-13) 式中:r i 1
为rr e 1
产生的转子电流,与r
ψ反向,其幅值为dt
d r i r r r ψ=11
;r i 2为rr
e 2产生的转子电流,比r ψ滞
后o
90,其幅值为r
r
r r i ψ∆=ω2。
由于磁链位置轴1φ位于转子磁链r ψ轴线上,所以r i 1就是r i 在1φ轴上的分量,r i 2就是r
i 在2φ轴的分量。
dt
d r i i r
r r r
ψ-
=-=11
1φ r
r
r r
r i i ωψφ∆-=-=2
2 (4-14)。