GAMIT学习资料整理
GAMIT使用笔记

大气层研究和空间空间电离层研究使用到是GAMIT模块,精密定位还GAMIT、GLOBK两个模块都需要。
安装完成后的几个重要文件:gg/gamit(基线平差)和gg/kf(Kalman Filter)两个目录下到模块是用fortran编写的。
gg/com是cshell编写到脚本,重要用于gamit和kf目录下的模块的组织。
gg/tables是表文件。
年更新LUNTAB、SOLTAB 、NUTABL、LEAP.SEC周更新UT1、POLEsh_gamit批处理要求工程目录下至少有rinex brdc gfiles三个目录。
分别放O文件,N文件,卫星轨道文件g文件,这样做的目的是把文件分类,最后这些文件都会被link到单天的目录之下。
注意:需要将所有观测文件和表文件都link到单天目录下的,sh_gamit能自动完成link功能。
模型说明:1.otl 潮汐改正2.vmfl GMF 投影函数3.atml大气荷载模型,对高程影响较大,可消除周跳波动,可靠性需要进一步证实4.atl大气抄袭荷载模型和met气象模型星历文件:e/n, sp3, g,te/n为广播星历,主要用来你和卫星和接收机的种差g文件是根据sp3文件拟合的某天的圆形轨道参数t文件是根据观测文件和g文件求出的卫星位置,是gamit专用格式gcc编译器作用:将常见的编程语言转化为c语言。
安装gcc需要把原来到gcc覆盖。
在/usr目录下,具体怎么做,不是很清楚。
软件中的栅格文件:下载地址:ftp://1)海洋潮汐。
例如otl_FES2004.grid放在软件talbels目录下。
链接到otl.grid。
2)大气负荷。
例如atmldisp_cm.2006,每年更新一次。
连接到atmldisp_grid.20063)vmfl投影函数栅格,例如vmflgrd2006,连接到map.grid.2006。
每年更新一次。
以example为例作一个实例:1)在/media/Tool/TOOL/专业工具/GAMIT下新建文件夹10-05-18-EXAMPLE,在该目录下建立tables目录。
GAMIT使用手册
GAMIT/GLOBK软件使用手册一软解介绍GAMIT软件最初由美国麻省理工学院研制, 后与美国SCRIPPS海洋研究所共同开发改进。
该软件是世界上最优秀的GSP定位和定轨软件之一, 采用精密星历和高精度起算点时, 其解算长基线的相对精度能达到10-9量级, 解算短基线的精度能优于1mm, 特点是运算速度快、版木更新周期短以及在精度许可范围内自动化处理程度高等, 因此应用相当广泛。
GAMIT软件由许多不同功能的模块组成, 这些模块可以独立地运行。
按其功能可分成两个部分: 数据准备和数据处理。
此外, 该软件还带有功能强大的shell程序。
目前,比较著名的GPS数据处理软件主要有美国麻省理工学院(MIT)和海洋研究所(SIO)联合研制的GAMIT/GLOBK软件、瑞士伯尔尼大学研制的BERNESE软件、美国喷气推进实验室(JPL)研制的GIPSY软件等。
GAMIT/GLOBK和BERNESE软件采用相位双差数据作为基本解算数据,GIPSY软件采用非差相位数据作为基本解算数据,在精度方面,三个软件没有明显的差异,都可得到厘米级的点位坐标精度。
相比较而言,GIPSY软件为美国军方研制的软件,国内只能得到它的执行程序,在国内,它的用户并不多,BERNESE软件需要购买,它的用户稍微多一点,GAMIT/GLOBK软件接近于自由软件,在国内拥有大量用户。
GLOBK软件核心思想是卡尔曼滤波(卡尔曼滤波理论是一种对动态系统进行数据处理的有效方法, 它利用观测向量来估计随时间不断变化的状态向量),其主要目的是综合处理多元测量数据。
GLOBK的主要输人是经GAMIT处理后的h-file和近似坐标, 当然,它亦己成功地应用于综合处理其它的GPS软件(如Bernese和GIPSY)产生的数据以及其它大地测量和SLR 观测数据。
GLOBK的主要输出有测站坐标的时间序列、测站平均坐标、测站速度和多时段轨道参数,GLOBK可以有效地检验不同约束条件下的影响, 因为单时段分析使用了非常宽松的约束条件,所以在GLOBK中就可以对任一参数强化约束。
GAMIT使用手册
GAMIT/GLOBK软件使用手册一软解介绍GAMIT软件最初由美国麻省理工学院研制, 后与美国SCRIPPS海洋研究所共同开发改进。
该软件是世界上最优秀的GSP定位和定轨软件之一, 采用精密星历和高精度起算点时, 其解算长基线的相对精度能达到10-9量级, 解算短基线的精度能优于1mm, 特点是运算速度快、版木更新周期短以及在精度许可范围内自动化处理程度高等, 因此应用相当广泛。
GAMIT软件由许多不同功能的模块组成, 这些模块可以独立地运行。
按其功能可分成两个部分: 数据准备和数据处理。
此外, 该软件还带有功能强大的shell程序。
目前,比较著名的GPS数据处理软件主要有美国麻省理工学院(MIT)和海洋研究所(SIO)联合研制的GAMIT/GLOBK软件、瑞士伯尔尼大学研制的BERNESE软件、美国喷气推进实验室(JPL)研制的GIPSY软件等。
GAMIT/GLOBK和BERNESE软件采用相位双差数据作为基本解算数据,GIPSY软件采用非差相位数据作为基本解算数据,在精度方面,三个软件没有明显的差异,都可得到厘米级的点位坐标精度。
相比较而言,GIPSY软件为美国军方研制的软件,国内只能得到它的执行程序,在国内,它的用户并不多,BERNESE软件需要购买,它的用户稍微多一点,GAMIT/GLOBK软件接近于自由软件,在国内拥有大量用户。
GLOBK软件核心思想是卡尔曼滤波(卡尔曼滤波理论是一种对动态系统进行数据处理的有效方法, 它利用观测向量来估计随时间不断变化的状态向量),其主要目的是综合处理多元测量数据。
GLOBK的主要输人是经GAMIT处理后的h-file和近似坐标, 当然,它亦己成功地应用于综合处理其它的GPS软件(如Bernese和GIPSY)产生的数据以及其它大地测量和SLR观测数据。
GLOBK的主要输出有测站坐标的时间序列、测站平均坐标、测站速度和多时段轨道参数,GLOBK可以有效地检验不同约束条件下的影响, 因为单时段分析使用了非常宽松的约束条件,所以在GLOBK中就可以对任一参数强化约束。
GAMIT简介

(2)文件准备(续)
kf . 10. 21. tar . Z kf 软件压缩包 libraries. 10. 21. tar . Z 库文件压缩包 templates. 10. 21. tar . Z 数据模板压缩包 map s. 10. 21. tar . Z 地图数据压缩包 将install_software设置为可执行文件 chmod +x install_software ./install_software //运行install_software
第一步: 数据编辑得出干净的观测数据文件——X-file. 数据编辑用快速解(Quick Solution)进行, 其目的并不是求解参数,而是生成干净的 Xfile. 流程见图1:
18
MAKEX MODEL AUTCLN SOLVE CFMRG CVIEW SCANDD
//将RINEX转换成 将 转换成GAMIT中的观测文件:X-file 中的观测文件: 转换成 中的观测文件
9
GAMIT安装 安装:(1)重新编译 重新编译GCC 安装 重新编译
从一下网站下载gcc-3.4.6.tar.bz2源代码: /gnu/gcc/gcc-3.4.6/gcc3.4.6.tar.bz2 在当前工作目录下解压: tar –jxvf gcc-3.4.6.tar.bz2 改设置:vi ~/gcc-3.4.6/libf2c/libI77/fio.h 将“ # define MAXUNIT100”的行更改为“ # define MAXUNIT 10000” 配置:./configure –prefix=/usr –enablethreads=posix –eanble—long-long –enablelanguages=c,c++,java,f77 重新编译和安装gcc/ g77 : make make install
GAMIT学习资料整理

GAMIT10.4安装(基于ubuntu10.04)1、安装虚拟机vmware、ubuntu10.04;2、进入终端输入:sudo passwd root为root用户创建密码,并以root用户登录,或sudo su 回车;3、系统更新、汉化;4、安装gcc:# apt-get install gcc ;5、安装csh:# apt-get install csh 修改bash为csh,重启;6、安装gfortran :# apt-get install gfortran ;7、安装libx11-dev库支持# apt-get install libx11-dev ;8、修改shall为bash,重启,并设置路径:回到用户根目录,打开.bashrc ,在最后加上如下代码即可export PATH=$PATH:/opt/gamit/gamit/bin:/opt/gamit/com:/opt/gamit/kf/binexport setenv HELP_DIR=/opt/gamit/help/9、将gamit安装包放在目录opt/gamit/下进入目录:# cd /opt/gamit10、修改install_software文件内容:# gedit install_software ,打开install_software文件,在文件的中下部修改“usr -name libX11.a”为"usr -name libX11.so" 。
(动态共享库)11、运行install_software :# ./install_software,按提示输入两次Y后,修改makefile.config ,在/opt/gamit/libraries里,修改Makefile.config中的一组参数(1)MAXSIT 55 、MAXSAT 32 、MAXATM 25 、MAXEPC 5760(2)# Specific to FC5(F6,F7,F8 )然后,在输入两次Y完成安装;12、安装完后,打开终端输入:doy,查看程序是否已正确安装。
gamit笔记
Glorg_cmd:No specific station coordinates are tightly constrainedGlobk_cmdCom_file包含运行信息的common fileSrt_fileHfile时间排列list的二进制文件Sol_file结果和协方差矩阵的二进制文件To use glorg as stand-alone module, the samecom_file command must appear in both thecommand file for globk and the command file for the(subsequent) glorg run为使用glorg作为独立模块,globk和glorg控制文件运行都必须包含同样的com_file命令APR_XXX This command will free (estimate) a parameter.如果这个命令缺失,相应的参数将被固定到它的先验值如果先验sigma值定为0,将不估计参数(effectively left unconstrained))强制一个参数到它的先验值,使用F作为sigmaApr_neu测站位置估计Apr_neu site sigN、sigEsigUsigVNsigVEsigVUSite是站名,可以应用到所有站,sigNsigEsigU位置的先验sigma(in meters)sigVNsigVEsigVU先验速度sigma(in m/yr)apr_neu SITE 10 10 10 F 0.1 0设置每个测站NEU方向先前sigma为10米,强制N速度为先验值,设置E速度先前sigma为0.1m/yr,不估计垂直向速度Mar_neu Estimating site positionstochasticallymar_neuMarkov随机游走过程(random walk process)Mar_neu site rwNrwErwUrwVNrwVErwVUSite 站名,可以all,rwNrwErwU位置的随机游走(m^2/yr)rwVNrwVErwVU速度的随机游走(in (m/yr)^2/yr)通常使用0 0 0apr_svsEstimating satellite orbitparameters设置航天飞行器(space vehicle)参数的先验sigmaApr_svs PRN X Y Z VxVyYzrad_parmsPRN 卫星号PRN_nn或者ALLXYZ 位置sigma(3个值)(m)VxVyVz速度sigma(3个值)(mm/s)rad_parms辐射参数(radiation parameter)sigma 高达11个值,0-1的小数全球测站估计轨道apr_svs all 100 100 100 10 10 10 1R只有当地坐标,约束轨道到先验值apr_svs all 0.1 0.1 0.1 0.01 0.01 0.01 0.01R最后的R表示剩下的radiation 参数EOP参数先验不确定度Apr_wob X Y XdotYdotX Y 极位置(pole position )(mas)毫角秒XdotYdot变化率(mas/day)Apr_ut1 <ut1><ut1 dot>Ut1 in mas,ut1 dot in mas/day噪声处理一样形式Mar_wob RWX RWY RWXdRWYd单位都是(mas2)/yr(mas/day)2/yr Mar_ut1 for ut1(mas2)and (mas/day)2/yr通常使用以下两个形式全球网– apr_wob 10 10 1 1– apr_ut1 10 1区域网(constrained)– apr_wob 0.2 0.2 0.02 0.02– apr_ut1 0.2 0.02UT1问题需要小心使用UT1,因为它不能从卫星轨道节点分离如果UT1约束的话,UT1表和轨道必须使用同一框架,如果处理当地,是可以的If local processing, then should be OK如果使用不同的EOP表来确定轨道,UT1应该松弛Frame estmation commands 框架估计命令Apr_tran< X Y Z><VxVyVz>估计坐标系统的平移translationapr_scale<ppb><ppb/yr>估计缩放和缩放率scale scale ratemar_tran和mar_scale指定处理噪声通常全球网下使用File 命令一些命令来控制GLOBK读的文件Apr_file<name >使用一些先验坐标文件格式是:• Site_name X Y Z VxVyVz epoch• Site names are 8 characters, for GPS ABCD_GPS• X Y Z are geocenter Cartesian (m)• Velocities are m/yr• Epoch is decimal (十进位的、小数)yearsApriori position files先验位置文件Apr_files命令can be issued multiple times withthe latest values taken不过没指定,使用GAMIT先验坐标(没有速度)EXTENDED选项允许更复杂的behaviors (见globk.hlp)Orbit files轨道文件处理单天解时,默认使用GAMIT结果里的轨道多天解,需要用GLOBK,make_svs命令产生轨道文件格式:make_svs<file name>• <file name> will be overwritten• Command must be near top of command file.EOP files EOP文件默认使用Gamit的EOP,但可以通过用in_pmu命令改变格式:– in_pmu<file name>文件格式:– yy mm ddhr min Xpole +- Ypole +- UT1-AT +-– Must be uniformly spaced– Pole in arc-seconds, UT1 in time-secondsEarthquake files 地震文件使用地震文件可以自动说明地震引起的位移主要功能,用2-char code 说明地震,重新命名测站重命名命令:• Rename <old><new> [HFile code] [Epoch ranges][Position shift]Earthquakes in eq_file• For earthquake:• eq_def<code>Lat Long Radius Depth Epoch(精度纬度半径深度历元)• eq_cosei<code><Static Variance><distance dependentvariances>• eq_post<code><dur><Static RW><distance dependentRW>• eq_rename<code>• The rename option cause site to renamed fromxxxx_GPS to xxxx_G[Code] Glorg运行通过应用明确的旋转和平移,而不是一些站的紧约束来定义坐标系统可以单独程序调用或者在globk时运行Glorg imbedded commands嵌入的glorg命令• The globk控制文件嵌入的GLORG命令有:• org_cmd<glorg command file name>• org_opt<Options for output>• org_out<output file name>如果org_out没给,输出文件名将用.org替代Miscellaneous commands其他五花八门的命令max_chi<max chi**2 Increment><max prefitdifference><max rotation> • 允许自动删除坏的H文件和坏的坐标• app_ptid允许应用极潮改正,如果gamit运行里没有包括的话因为如果应用改正,这里没有指定,小心使用SINEX文件• crt_opt, prt_opt, org_opt指定屏幕输出、打印和org文件选项• glorg help 给出所有选项,主要有:– ERAS –写之前檫掉文件(通常追加文件)– NOPR –不写输出文件– BLEN –基线长度– BRAT -- baseline rates when velocities estimated估计速度时,基线率– VSUM –经纬度速度的summary (需要画速度)– PSUM –经纬度位置的summary– GDLF –包括H文件的列表和和运行时的卡方值chi**2 increments– CMDS –在输出文件里重复globk控制文件这些选项的主要作用是控制输出文件小点Command file layout控制文件布局–通常,globk中的命令可以无序安排–也可以重复,后边的将代替前面的•如apr_neu all 10 10 10 0 0 0• apr_neuiisc_gps 0.01 0.01 0.01 0 0 0• 将用10m约束所有站,除过IISC站用10mm约束–下面这些命令必须在前面出现: com_file, srt_file, make_svs, eq_fileGlobk velocity command file• 如果多年的数据,尝试解算速度• globk控制文件必须包括– apr_neu all 10 10 10 1 1 1–其中1 1 1 是速度不确定度in m/yr–如果速度和指定站相关,添加:– apr_neuiisc_gps 0.01 0.01 0.01 F FF–将固定IISC的速度–通常不这么做,而是用glorg来广义Glred为了检查H文件的独立位置的质量,我们可以只是用H文件列表生成gdl文件(we could create gdl files with just single hfiles listed),每一个用包含下面内容的控制文件运行globk•apr_neu all 10 10 10 0 0 0• apr_neuiisc_gps 0.01 0.01 0.01 0 0 0• iisc再次被约束and normal process• 用GLOBK运行一系列的独立的H文件是冗繁的(Running globk on a set of individual hfiles is tedious),所以我们用可以自动做这些的程序:glredglred和globk同样的运行方式,例如:– glred<crt><prt><log><gdl file><command file>–而不是联合gdl文件里的所有数据,每个文件用globk单独处理。
运用GAMIT进行简单的解算

运用GAMIT进行简单的解算运用GAMIT进行简单的解算钟仁健 2007-3-29(1).gamit的使用步骤A. 更新如下参数表:pole(极移参数)、ut1(国际时间系统表)、luntab(月亮表)、soltab(太阳表)、leap.second(从1982年以来TAI-TUC的跳秒)、gdetic.dat(大地水准面参数表)、antmod.dat(天线高以及相位中心便宜模式参数表)、svnav.dat(卫星数目、编号等信息)、rcvant.dat(接收机和天线信息表)、nutabl(摄动历表)。
可以从相关IGS站下载上面的参数表,也可以用GG提供的命令来自动下载,前提是linux能上网,下载好后,将这些表覆盖原来GG目录下(/gamit/tables)的同名表。
B. 从IGS站下载用于联测的IGS站的观测数据和IGS精密星历。
可以直接上网下载,也可以用相关命令实现该功能。
观测数据下载好后,将其解压缩,并转换到标准的RINEX格式。
C. 在根目录下建立工作目录,将各种参数表、IGS站的观测文件、要解算的观测数据拷贝到里面。
D. 建立初始坐标文件(l-文件),初始坐标文件中坐标的精度对解算精度影响较大。
E. 用makexp命令准备好解算所需的文件。
该命令会提示用户输入year、doy、session number、l-file、nav-file。
其中:year表示年,如98、2005;doy表示day of year即年积日,如001、200;session number 表示任务数目,可以输入1;l-file表示概略坐标文件,一个标准的l文件名为lXXXXy;nav-file表示导航文件,XXXXDDDN.yynF. sh_sp3_fit 有精密星历生成轨道文件(g-)G. sh_check_sess 检查g文件H. makej 生成钟文件I. sh_check_sess 检查j文件J. makex 生成K-文件和想、X-文件K. fixdrv 生成批处理程序L. csh 执行所生产的批处理程序(2).解算实例,有需要解算的o文件:DAMP0260.05o、JSHA0260.05o、SHRF0260.05Oo,这些观测文件是2005年第26个年积日观测的(GAMIT10.3的发布日期是2006.12.5)。
GAMBIT学习笔记
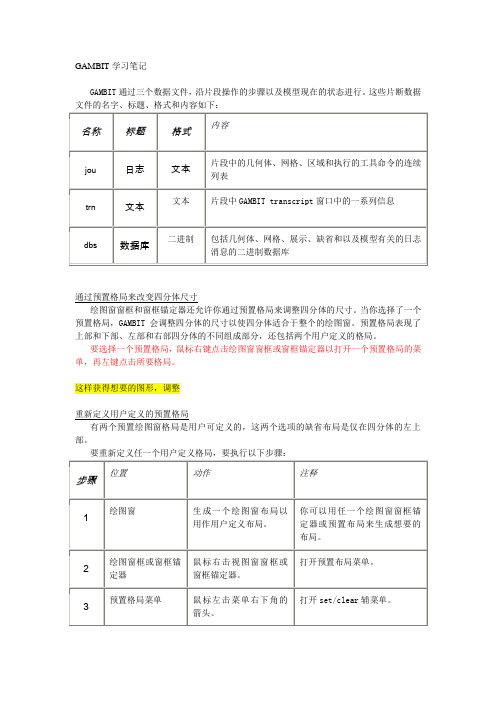
GAMBIT学习笔记GAMBIT通过三个数据文件,沿片段操作的步骤以及模型现在的状态进行。
这些片断数据文件的名字、标题、格式和内容如下:通过预置格局来改变四分体尺寸绘图窗窗框和窗框锚定器还允许你通过预置格局来调整四分体的尺寸。
当你选择了一个预置格局,GAMBIT会调整四分体的尺寸以使四分体适合于整个的绘图窗。
预置格局表现了上部和下部、左部和右部四分体的不同组成部分,还包括两个用户定义的格局。
要选择一个预置格局,鼠标右键点击绘图窗窗框或窗框锚定器以打开一个预置格局的菜单,再左键点击所要格局。
这样获得想要的图形,调整重新定义用户定义的预置格局有两个预置绘图窗格局是用户可定义的,这两个选项的缺省布局是仅在四分体的左上部。
要重新定义任一个用户定义格局,要执行以下步骤:要把任一个用户定义格局调整回为缺省设定要执行以下步骤:Main pad 包括以下命令按钮这些都是常用的符号创建新进程的时候有疑问要创建一个新的进程,用户必须指定如下项目:1 进程标识进程标识可以由任意的字母组合和/或GAMBIT所运行的系统环境下允许的有效文件名中所包含的符号组成。
2 保存选项当用户建立一个新进程时,将删除与当前进程相关的所有数据。
为了在建立新的进程之前保存当前进程的相关数据,必须选中Create New Session窗口中的Save current session选项。
进程标题包含该进程的一般描述。
他可以由长度不超过80个字符的任意字母组合和/或符号组合而成。
怎么改变Fliter?怎么将文件存到制定的文件夹中?导入CAD文件要导入一个CAD文件,用户必须设定如下信息:∙CAD System∙File NameCAD System指定用来生成该CAD文件的程序名称。
GAMBIT支持从如下三种CAD程序中之一导入几何结构:Pro/ENGINEER、OPTEGRA Visualizer和I-DEAS。
注意:当用户在Import CAD窗口(如下图)中指定了Pro/ENGINEER选项,GAMBIT将在后台运行Pro/ENGINEER来生成一个STEP文件,然后读入这个STEP文件了产生GAMBIT几何结构。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GAMIT10.4安装(基于ubuntu10.04)1、安装虚拟机vmware、ubuntu10.04;2、进入终端输入:sudo passwd root为root用户创建密码,并以root用户登录,或sudo su回车;3、系统更新、汉化;4、安装gcc:# apt-get install gcc ;5、安装csh:# apt-get install csh 修改bash为csh,重启;6、安装gfortran :# apt-get install gfortran ;7、安装libx11-dev库支持# apt-get install libx11-dev ;8、修改shall为bash,重启,并设置路径:回到用户根目录,打开.bashrc ,在最后加上如下代码即可export PA TH=$PA TH:/opt/gamit/gamit/bin:/opt/gamit/com:/opt/gamit/kf/binexport setenv HELP_DIR=/opt/gamit/help/9、将gamit安装包放在目录opt/gamit/下进入目录:# cd /opt/gamit10、修改install_software文件内容:# gedit install_software ,打开install_software文件,在文件的中下部修改“usr -name libX11.a”为"usr -name libX11.so" 。
(动态共享库)11、运行install_software :# ./install_software,按提示输入两次Y 后,修改make ,在/opt/gamit/libraries里,修改Make中的一组参数(1)MAXSIT 55 、MAXSAT 32 、MAXATM 25 、MAXEPC 5760(2)# Specific to FC5(F6,F7,F8 )然后,在输入两次Y完成安装;12、安装完后,打开终端输入:doy,查看程序是否已正确安装。
(注:在root用户下安装完后,回到自己用户不能使用,原因:需要修改软件的权限(chmod 777 软件名)、数据准备阶段(个人理解:这一过程可以先在windows下准备好,到时候再拷到linux的工程文件夹)1.观测文件标准化:1)观测文件o文件的文件名要小写,观测文件里的点名一般要大写。
2)认真检查观测文件内接收机类型、天线类型并查看GAMIT的ant.dat/rcvant.dat中是否有相应的类型,否则需要更新tables中的文件。
3)天线高及天线测量方式。
2.需要从网上下载的数据文件1)v/CORS/Gpscal.html查询观测 0-files 文件所在的GPS周天,年积日与 UTC 之间的关系。
2)导航电文文件brdcdoyn.11n、精密星历*.sp3文件以及用到的IGS跟踪站O-files数据。
(导航电文文件下载autodoyn.11n;注意:文件名都要改成小写)3.一些常见表文件说明dcb.dat:码相关型接收机伪距改正参数统计表;(缺少这个文件基线处理最后一部会出错)antmod.dat:天线相位中心参数文件;rcvant.dat:接收机及天线名称对照表;guess_rcvant.dat: (如果rcvant.dat中没有rinex头文件中的接收机或天线型号,将从该文件中获取,用户可以自己修改)(该文件在处理过程中会自己产生,一般没用不需要准备)otl_FES2004.grid: GAMIT10.4中的潮汐改正文件,696M注:地球固体潮改正和海洋负荷潮改正:(详见《卫星导航定位新技术及高精度数据处理方法》p7-p8)地球固体潮改正:摄动天体(月亮、太阳)对弹性地球的引力使地球表面产生周期性的涨落,称为固体潮现象。
在小于100KM的GPS相对定位中,两个测站的固体潮影响几乎是相同的,在差分过程中可抵消,因此可不考虑此项改正。
海洋负荷潮改正:由海洋潮汐的周期性涨落所引起的。
与固体潮类似,但小一个数量级。
需要每周更新的:ut1.:地球自转参数; ln –s ***pole.:极移参数; ln –s ***需要每年更新的:leap.sec:跳秒表;soltab.:太阳星历; ln –s ***luntab.:月亮星力; ln –s ***nutabl.:章动参数表; ln –s ***gdetic.dat:各种大地坐标系参数;no: ln –s ***grid.otc: ln –s ***(这个好像有问题,GAMIT10.4中不是这个文件)?svs_exclude.dat:需要剔除卫星列表;(没有的话,处理过程中会提示waring,但也可以计算)(注:应该是每次计算都需要更新的,个人理解)vg_in:测站坐标速度表;autcln.cmd:(注:如果没有的话,数据处理的最后一步 csh btest1.bat不能正常进行)需要重点准备的:sestbl:数据处理参数设置表;sittbl:测站约束表;:测站信息表;lfile.:站初始坐标(球坐标);(自己制作)、文件准备阶段1.文件结构整理test:工程目录,在其下面包括:1)tables/存放各种表文件;2)igs/存放精密星历*.sp3文件;3)rinex/存放观测数据文件*doyn.11文件;4)brdc/存放广播星历文件brdcdoy0.11n文件;5)doy1/ doy2/ ……/存放各个时段解算的文件及链接文件。
2.需要重点准备的4个文件1) :记录各测站的站点、站点名称、开始观测时间、结束观测时间、天线高、天线量测方法、接收机类型、软硬件版本号、天线类型等信息。
严格按照已经给出的跟踪站格式编辑。
(注意:要现在当前目录下拷入文件,把内容删掉留下前面的几行,否则后面的步骤没法进行)具体操作方法有二:1、手动操作,按照相应文件格式对齐操作;可以从样本格式开始编辑。
2、自动提取观测文件的有关信息,生成 文件。
在各时段文件目录下操作:sh_upd_stnfo –files site1doy0.yyo site2doy0.yyo –orbt igsf –u –ref ../tables/运行上述命令后,就自动从观测文件0-files中提取重要信息,生成 文件。
我对文件的准备(武大郭博峰):1、rinex文件夹下新建文件夹all_station(存放所有点)2、工程观测文件(o-files)复制到all_station,框架网(o-files)复制到all_station3、进入Terminalcd test/rinex/all_stationsh_upd_stnfo –files *.11o -ref (此文件为软链接文件,从~/不常更新表/ 链接至指定文件夹下,且只有一个表头)4、查看文件是否正确gedit 5、将得到的复制到lfiles文件夹下2) l-file:记录各测站的近似坐标: Gamit要求是球面坐标,即l-file。
将所有 o 文件整理在一起,然后分别运行如下命令:grep POSITION *.11o > lrx2apr l 2011 250 (注:根据所有的o文件中的x、y、z取平均值,文件名为l)gapr_to_l l lfile. “ “ 2011 250我对l-file文件的准备(武大郭博峰):1、在rinex文件夹下新建文件夹all_data(存放所有点)2、进入该文件夹:cd test/rinex/all_data3、提取POSITIONgrep POSITION *.11o >l4、查看l文件是否正确gedit l5、rx2apr l 2011 250可得到l文件(空间直角坐标)(注:根据所有的o文件中的x、y、z取平均值)6、l转到 lfile. (球面坐标)Gapr_to_l l lfile. “ ” 2011 2507、将得到的l复制到lfile.文件夹下3)sestbl:(该表是gamit的关键,需要仔细学习)从tables文件夹下复制到lfiles中。
Gamit基线处理时的模型选择配置文件。
需要仔细参照技术文档和程序代码,一般情况下采用默认值,通常需要修改的地方有:Choice of Observable(观测值的选择类型)、Choice of Experiment(基线处理类型)两项.还有高度截止角设定,禁止固体潮改正,变潮汐改正系数个数31为23.这个模型参数的设置只要是对处理方式进行选取和误差改正模型的选取。
要是设定了误差模型改正,那在tables表里需要有这些模型改正文件,同时也需要将这些文件链接到各个观测时段文件里。
否则在处理的时候会出错的。
4)sittbl工程网和框架网需要分开生成,例如sittbl_kjw和sittbl_gcw。
也是从tables文件夹下复制到lfiles中。
各测站的精度控制指标。
一般情况下采用默认值。
对高精度的已知坐标强约束待求点坐标松弛约束。
是否需要igs跟踪站点的文件做约束吗?3.链接各个测站观测数据(包括brdc*.11n及igs*.sp3文件)在各时段文件夹下建立观测数据连接,在各时段文件夹下输入命令:(由于此法将GAMIT装在/OPT 下,而test文件夹在/home下,为两个不同的文件系统,因此要用符号链接。
而我自己的方法将GAMIT装在/home/jiang下为相同的文件系统。
)ln –s ../rinex/*doy?.yyo ./ln –s ../igs/*igsweek.sp3 ./ln –s ../brdc/* doy?.yyn ./4.将tables表文件中需要的文件(包括luntab、soltab、nutabl、pole、ut1、pmu文件,还有一些误差改正模型文件等)链接到各时段文件夹。
输入以下命令建立链接:(注:ln –s 是符号连接的意思)ln –s ../tables/luntab.2011.J2000 . /luntab.ln –s ../tables/soltab.2011.J2000 ./soltab.ln –s ../tables/nutabl.2011 . /nutabl.ln –s ../tables/no . /pole.ln –s ../tables/no . /ut1.ln –s ../tables/no . /pmu.另外,潮汐改正文件也是很容易出错的文件。
以10.4版本为例,默认的潮汐改正文件名为otl.grid(此文件为损坏文件)(链接前是otl._FES2004.grid)。
一定要检查一下otl.grid 是否是真实链接,出现死链接的情况需要手动链接。