S2-EL-11-E05 KDL32驱动系统课程rev1_版面修订
RX32S11 参考手册说明书

R X32S11参考手册文档编号:RM00002基于Arm○R Cortex○R-M0内核的32位专业电机微控制器版本:V2.0目录1 简介 (16)2 文档约定 (17)2.1 寄存器缩写列表 (17)2.2 词汇表 (17)3 系统和存储器概述 (18)3.1 系统架构 (18)3.2 存储器结构 (18)3.2.1 介绍 (18)3.2.2 存储器映像和寄存器边界地址 (19)3.3 内置SRAM (20)3.4 Flash概述 (20)4 内置Flash存储器(FLASH) (21)4.1 介绍 (21)4.2 Flash主要特征 (21)4.3 Flash功能描述 (21)4.3.1 Flash结构 (21)4.3.2 Flash擦除和编程 (21)4.3.3 解锁Flash (22)4.3.4 Flash擦除流程 (22)4.3.5 FLASH写入流程 (22)4.4 选项字节功能描述 (22)4.5 Flash寄存器 (23)5 电源控制(PWR) (24)5.1 电源 (24)5.2 电源管理器 (24)5.2.1 上电复位(POR)和掉电复位(PDR) (24)5.2.1 可编程电压检测器(PVD) (25)5.3 低功耗模式 (26)5.3.1 睡眠模式 (26)5.3.2 待机模式 (27)5.4 低功耗模式下的自动唤醒(AWU) (27)5.5 电源控制寄存器 (27)5.5.1 PMU配置寄存器(PWR_PMUCON) (27)5.5.2 电源检测阈值配置寄存器(PWR_VDETCFG) (28)5.5.3 PMU中断使能寄存器(PWR_PMUIE) (28)5.5.4 PMU中断标志寄存器(PWR_PMUIF) (28)5.5.5 PMU状态寄存器(PWR_PMUSTA) (29)5.5.6 唤醒标志寄存器(PWR_WAKEIF) (29)6 复位和时钟控制 (31)6.1 复位 (31)6.1.1 系统复位 (31)6.1.2 电源复位 (31)6.2 时钟 (32)6.2.1 HSI时钟 (33)6.2.2 LSI时钟 (33)6.2.3 系统时钟(SYSCLK)选择 (33)6.2.4 RTC时钟 (33)6.2.5 看门狗时钟 (33)6.2.6 时钟输出 (33)6.3 CMU寄存器 (33)6.3.1 写保护寄存器(CMU_WPREG) (33)6.3.2 系统时钟配置寄存器(CMU_SYSCLKCFG) (34)6.3.3 芯片状态指示寄存器(CMU_JTAGSTA) (34)6.3.4 LSI时钟调整寄存器(CMU_LSIADJ) (35)6.3.5 HSI时钟调整寄存器(CMU_HSIADJ) (35)6.3.6 时钟状态寄存器(CMU_CLKSTA) (35)6.3.7 系统时钟分频寄存器(CMU_SYSCLKDIV) (36)6.3.8 CLKOUT时钟选择寄存器(CMU_CLKOUTSEL) (36)6.3.9 CLKOUT时钟分频寄存器(CMU_CLKOUTDIV) (36)6.3.10 内部模块使能控制寄存器0(CMU_CLKCTRL0) (37)6.3.11 内部模块使能控制寄存器1(CMU_CLKCTRL1) (38)6.3.12 FLASH控制寄存器(CMU_FLASHCON) (39)6.3.13 FLASH锁定寄存器(CMU_FLASHLOCK) (39)6.3.14 INFO Flash锁定寄存器(CMU_INFOLOCK) (40)6.3.15 FLASH访问周期配置寄存器(CMU_MULTFUNCFG) (40)6.3.16 芯片版本寄存器(CMU_CHIPID) (40)6.3.17 时钟滤波控制寄存器(CMU_FLTCTR) (41)7 通用和复用功能I/O(GPIO) (42)7.1 介绍 (42)7.2 GPIO主要特征 (42)7.3 GPIO功能复用 (42)7.3.1 通用IO(GPIO) (43)7.3.2 IO引脚复用功能 (43)7.3.3 I/O端口控制寄存器 (44)7.3.4 I/O端口数据寄存器 (44)7.3.5 I/O复用功能输入/输出 (44)7.3.6 外部中断/唤醒线 (44)7.3.7 输入模式配置 (44)7.3.8 输出模式配置 (45)7.3.9 复用功能配置 (46)7.3.10 模拟功能配置 (46)7.4 GPIO寄存器 (47)7.4.1 端口功能配置寄存器1(GPIOx_IOCFG) (47)7.4.2 端口复用功能配置寄存器1(GPIOx_AFCFG1) (48)7.4.3 端口复用功能配置寄存器2(GPIOx_AFCFG2) (48)7.4.4 端口方向配置寄存器(GPIOx_PTDIR) (49)7.4.5 端口上下拉配置寄存器(GPIOx_PUPDN) (49)7.4.6 端口数据寄存器(GPIOx_PTDAT) (49)7.4.7 端口设置寄存器(GPIOx_PTSET) (50)7.4.8 端口复位寄存器(GPIOx_PTCLR) (50)7.4.9 端口翻转寄存器(GPIOx_PTTOG) (51)7.4.10 端口开漏配置寄存器(GPIOx_PTOD) (51)7.4.11 端口高阻控制寄存器(GPIOx_HIIPM) (51)7.4.12 端口电平读取寄存器(GPIOx_IDR) (51)8 嵌套向量中断控制器(NVIC) (52)8.1 NVIC主要特征 (52)8.2 中断和异常向量 (52)9 中断和事件控制器(EXTI) (54)9.1 EXTI简介 (54)9.2 框图 (54)9.3 功能说明 (54)9.4 EXTI寄存器 (55)9.4.1 外部中断边沿配置寄存器(EXTI_EXTIE) (55)9.4.2 外部中断标志寄存器(EXTI_EXTIF) (55)9.4.3 外部中断滤波使能寄存器(EXTI_FIL TEN) (56)9.4.4 外部中断串口数字滤波使能寄存器(EXTI_RXFILTEN) (57)9.4.5 外部中断边沿配置寄存器(EXTI_EXTIE2) (57)9.4.6 外部中断标志寄存器2(EXTI_EXTIF2) (57)9.4.7 外部中断滤波选择寄存器(EXTI_FIL TSEL) (58)10 模拟数字转换器(ADC) (59)10.1 ADC简介 (59)10.2 ADC主要特征 (59)10.3 ADC功能描述 (59)10.3.1 ADC引脚/通道 (60)10.3.2 ADC开关 (61)10.3.3 ADC时钟 (61)10.3.4 通道选择 (61)10.3.5 单次转换模式 (61)10.3.6 连续转换模式 (61)10.3.7 扫描模式 (62)10.4 校准 (62)10.5 可编程的通道采样时间 (62)10.6 ADC寄存器 (63)10.6.1 SADC控制寄存器(ADC_SADCCON) (63)10.6.2 SADC序列转换控制寄存器(ADC_SADCSTR) (64)10.6.3 SADCCLK时钟配置寄存器(ADC_SADCCLK) (64)10.6.4 SADC中断控制寄存器(ADC_SADCIE) (64)10.6.5 SADC中断标志寄存器(ADC_SADCIF) (65)10.6.6 SADC采样时间配置寄存器(ADC_SADCSAMP) (65)10.6.7 SADC采样时间配置寄存器(ADC_SADCSAMP2) (66)10.6.8 SADC触发源及扫描序列长度寄存器(ADC_SADCTRGLEN) (66)10.6.9 SADC序列信道配置寄存器(ADC_SADCSEQCFG) (67)10.6.10 SADC序列数据寄存器(ADC_SADCDAT) (68)10.6.11 SADCx通用数据寄存器(ADC_SADCxDAT) (68)10.6.12 CALDATx校准值寄存器(ADC_SADC_SADC_CALDATx) (68)11 直接存储器访问控制器(DMA) (69)11.1 DMA简介 (69)11.1.1 DMA主要特征 (69)11.2 功能描述 (70)11.3 DMA处理 (70)11.3.1 仲裁器 (70)11.3.2 DMA通道 (70)11.3.3 DMA通道请求列表 (71)11.4 DMA寄存器 (72)11.4.1 DMA中断使能寄存器(DMA_DMAIE) (72)11.4.2 DMA中断标志寄存器(DMA_DMAIF) (72)11.4.3 DMA状态寄存器(DMA_CHNSTA) (73)11.4.4 DMA通道控制寄存器(DMA_CHNxCTL) (73)11.4.5 DMA通道源地址寄存器(DMA_CHNxSRC) (74)11.4.6 DMA通道目的地址寄存器(DMA_CHNxTAR) (74)11.4.7 DMA通道传输数量寄存器(DMA_CHNxCNT) (75)11.4.8 DMA已传输数据个数寄存器(DMA_CHNxTCCNT) (75)11.4.9 DMA通道块传输设置寄存器(DMA_CHNxBULKNUM) (75)12 高级控制定时器(TIM8) (76)12.1 TIM8简介 (76)12.2 TIM8主要特征 (76)12.3 TIM8功能描述 (78)12.3.1 时基单元 (78)12.3.2 计数器模式 (80)12.3.3 重复计数器 (90)12.3.4 时钟选择 (91)12.3.5 捕获、比较通道 (94)12.3.6 输入捕获模式 (96)12.3.7 PWM 输入模式 (97)12.3.8 强制输出模式 (97)12.3.9 输出比较模式 (98)12.3.10 PWM模式 (99)12.3.11 非对称PWM模式 (101)12.3.12 互补输出和死区插入 (104)12.3.13 使用刹车功能 (105)12.3.14 在外部事件时清除OCxREF信号 (108)12.3.15 产生六步PWM输出 (108)12.3.16 单脉冲模式 (110)12.3.17 编码器接口模式 (111)12.3.18 定时器输入异或 (113)12.3.19 与霍尔传感器接口 (113)12.3.20 TIM8定时器和外部触发的同步 (114)12.4 TIM8寄存器 (118)12.4.1 TIM8控制寄存器1(TIM8_CR1) (118)12.4.2 TIM8控制寄存器2(TIM8_CR2) (119)12.4.3 TIM8从模式控制寄存器(TIM8_SMCR) (120)12.4.4 TIM8 DMA/中断使能寄存器(TIM8_DIER) (122)12.4.5 TIM8状态寄存器(TIM8_SR) (123)12.4.6 TIM8事件产生寄存器(TIM8_EGR) (124)12.4.7 TIM8捕获/比较模式寄存器1(TIM8_CCMR1) (126)12.4.8 TIM8捕获/比较模式寄存器2(TIM8_CCMR2) (128)12.4.9 TIM8捕获/比较使能寄存器(TIM8_CCER) (130)12.4.10 TIM8计数器(TIM8_CNT) (133)12.4.11 TIM8预分频器(TIM8_PSC) (133)12.4.12 TIM8自动重装载寄存器(TIM8_ARR) (133)12.4.13 TIM8重复计数寄存器(TIM8_RCR) (134)12.4.14 TIM8捕获/比较寄存器1(TIM8_CCR1) (134)12.4.15 TIM8捕获/比较寄存器2(TIM8_CCR2) (135)12.4.16 TIM8捕获/比较寄存器3(TIM8_CCR3) (135)12.4.17 TIM8捕获/比较寄存器4(TIM8_CCR4) (136)12.4.18 TIM8刹车和死区寄存器(TIM8_BDTR) (136)12.4.19 TIM8捕获/比较寄存器5(TIM8_CCR5) (139)12.4.20 TIM8捕获/比较模式寄存器3(TIM8_CCMR3) (139)12.4.21 TIM8捕获/比较寄存器6(TIM8_CCR6) (140)12.4.22 TIM8捕获/比较模式寄存器(TIM8_CCR1N) (140)12.4.23 TIM8捕获/比较模式寄存器(TIM8_CCR2N) (141)12.4.24 TIM8捕获/比较模式寄存器(TIM8_CCR3N) (141)13 通用定时器(TIMx) (142)13.1 TIMx简介 (142)13.2 TIMx主要功能 (142)13.3 TIMx功能描述 (143)13.3.1 时基单元 (143)13.3.2 时钟的选择 (144)13.3.3 周期定时模式 (144)13.3.4 PWM模式 (145)13.3.5 捕获模式 (148)13.3.6 事件计数模式 (148)13.3.7 中断模式 (149)13.4 TIMx寄存器 (149)13.4.1 定时器控制寄存器(TIMx_TMRCON) (149)13.4.2 预分频寄存器(TIMx_TMRDIV) (150)13.4.3 周期寄存器(TIMx_TMRPRD) (150)13.4.4 捕获数据寄存器(TIMx_TMRCAP) (150)13.4.5 计数寄存器(TIMx_TMRCNT) (150)13.4.6 比较寄存器(TIMx_TMRCMP) (151)13.4.7 定时器中断使能寄存器(TIMx_TMRIE) (151)13.4.8 定时器中断标志寄存器(TIMx_TMRIF) (152)14 运算放大器(PGA/OPA) (153)14.1 运算放大器简介 (153)14.2 运算放大器特征 (153)14.3 运算放大器框图 (153)14.4 运算放大器寄存器 (154)14.4.1 运算放大器控制寄存器(OPA_CR) (154)15 比较器(CMP) (155)15.1 比较器简介 (155)15.2 比较器特征 (155)15.3 比较器开关控制 (155)15.4 比较器器输入和输出 (155)15.5 比较器锁定机制 (155)15.6 比较器轮询功能 (155)15.7 比较器框图 (155)15.8 比较器迟滞功能 (157)15.9 比较器消隐功能 (157)15.10 比较器寄存器 (159)15.10.1 CMP控制寄存器1(CMPx_CR1) (159)15.10.2 CMP控制寄存器2(CMPx_CR2) (160)15.10.3 CMP校正寄存器(CMPx_CAL) (162)15.10.4 轮询寄存器(PLC) (162)15.10.5 寄存器(PLS) (164)16 电机专用协同处理器(ME) (165)16.1 简介 (165)16.2 DIV模块 (165)16.2.1 概述 (165)16.2.2 除法器的使用方法 (165)16.2.3 DIV CR寄存器(DIV_CR) (166)16.2.4 DIV DD寄存器(DIV_DD) (166)16.2.5 DIV DI寄存器(DIV_DI) (167)16.2.6 DIV DQ寄存器(DIV_DQ) (167)16.2.7 DIV DR寄存器(DIV_DR) (167)16.3 SQRT模块 (167)16.3.1 概述 (167)16.3.2 SQRT使用方法 (167)16.3.3 SQRT CR寄存器(SQRT_CR) (168)16.3.4 SQRT DI寄存器(SQRT_DI) (168)16.3.5 SQRT DO寄存器(SQRT_DO) (168)16.4 SIN COS 表 (169)16.4.1 使用方法 (169)16.5 坐标转换 (169)16.5.1 使用方法 (169)16.6 IPD运算 (169)16.6.1 使用方法 (169)16.7 SMO运算 (170)16.7.1 使用方法 (170)16.8 SVPWM运算 (170)16.8.1 使用方法 (170)16.9 中断功能 (170)16.10 ME寄存器 (171)16.10.1 ME控制寄存器(ME_CR) (171)16.10.2 ME Ia寄存器(ME_Ia) (172)16.10.3 ME Ib寄存器(ME_lb) (172)16.10.4 ME Ic寄存器(ME_lc) (172)16.10.5 ME Ialpha寄存器(ME_Ialpha) (173)16.10.6 ME Ibeta寄存器(ME_Ibeta) (173)16.10.7 ME Iq寄存器(ME_Iq) (173)16.10.8 ME Id寄存器(ME_Id) (173)16.10.9 ME Vq寄存器(ME_Vq) (173)16.10.10 ME Vd寄存器(ME_Vd) (174)16.10.11 ME Valpha寄存器(ME_Valpha) (174)16.10.12 ME Vbeta寄存器(ME_Vbeta) (174)16.10.13 ME Angle寄存器(ME_Angle) (174)16.10.14 ME Cos寄存器(ME_Cos) (174)16.10.15 ME Sin寄存器(ME_Sin) (175)16.10.16 ME IPDSin寄存器(ME_IPDSin) (175)16.10.17 ME Kslid寄存器(ME_Kslid) (175)16.10.18 ME Kslf寄存器(ME_Kslf) (175)16.10.19 ME KF寄存器(ME_KF) (175)16.10.20 ME KG寄存器(ME_KG) (176)16.10.21 ME E0寄存器(ME_E0) (176)16.10.22 ME Ealpha寄存器(ME_Ealpha) (176)16.10.23 ME Ebeta寄存器(ME_Ebeta) (176)16.10.24 ME Zalpha寄存器(ME_Zalpha) (177)16.10.25 ME Zbeta寄存器(ME_Zbeta) (177)16.10.26 ME IalphaError寄存器(ME_IalphaError) (177)16.10.27 ME IbetaError寄存器(ME_IbetaError) (177)16.10.28 ME EstIalpha寄存器(ME_EstIalpha) (178)16.10.29 ME EstIbeta寄存器(ME_EstIbeta) (178)16.10.30 ME SMOTheta寄存器(ME_SMOTheta) (178)16.10.31 ME SMOIalpha寄存器(ME_SMOIalpha) (178)16.10.32 ME SMOIbeta寄存器(ME_SMOIbeta) (178)16.10.33 ME BEMFA寄存器(ME_BEMFA) (179)16.10.34 ME BEMFB寄存器(ME_BEMFB) (179)16.10.35 ME IPDTheta寄存器(ME_IPDTheta) (179)16.10.36 ME SVZone寄存器(ME_SVZone) (179)16.10.37 ME FOVM寄存器(ME_FOVM) (179)16.10.38 ME TPWM寄存器(ME_TPWM) (180)16.10.39 ME LSMIN寄存器(ME_LSMIN) (180)16.10.40 ME PDCH1寄存器(ME_PDCH1) (180)16.10.41 ME PDCH2寄存器(ME_PDCH2) (180)16.10.42 ME PDCH3寄存器(ME_PDCH3) (181)16.10.43 ME IER寄存器(ME_IER) (181)16.10.44 ME IFR寄存器(ME_IFR) (182)16.10.45 ME MCYC寄存器(ME_MCYC) (183)17 PID运算单元(PID) (184)17.1 PID简介 (184)17.2 PID使用方法 (184)17.3 PID寄存器 (185)17.3.1 PID CR寄存器(PID_CR) (185)17.3.2 PID REF寄存器(PID_REF) (185)17.3.3 PID FB寄存器(PID_FB) (185)17.3.4 PID OUT寄存器(PID_OUT) (186)17.3.5 PID ERR寄存器(PID_ERR) (186)17.3.6 PID INTG寄存器(PID_INTG) (186)17.3.7 PID KPG寄存器(PID_KPG) (186)17.3.8 PID KIG寄存器(PID_KIG) (187)17.3.9 PID KDG寄存器(PID_KDG) (187)17.3.10 PID KIMULP寄存器(PID_KIMULP) (187)17.3.11 PID DIV寄存器(PID_DIV) (187)17.3.12 PID INTGLIM寄存器(PID_INTGLIM) (188)17.3.13 PID OUTLIM寄存器(PID_OUTLIM) (188)18 实时时钟(RTC) (189)18.1 RTC简介 (189)18.2 主要特性 (189)18.3 功能描述 (189)18.3.1 概述 (189)18.3.2 复位过程 (189)18.3.3 中断功能 (190)18.4 RTC寄存器 (190)18.4.1 RTC控制寄存器(RTC_RTCCON) (190)18.4.2 RTC中断使能寄存器(RTC_RTCIE) (190)18.4.3 RTC中断标志寄存器(RTC_RTCIF) (191)18.4.4 RTC定时器2寄存器(RTC_RTCTMR2) (191)19 独立看门狗(IWDT) (192)19.1 IWDT简介 (192)19.2 IWDT主要特性 (192)19.3 WDT功能描述 (192)19.4 工作模式 (193)19.5 看门狗寄存器 (193)19.5.1 WDT喂狗与时间配置寄存器(WDT_WDTCLR) (193)19.5.2 WDT计数寄存器(WDT_WDTCNT) (193)20 I2C接口 (194)20.1 I2C简介 (194)20.2 I2C主要特点 (194)20.3 框图 (195)20.4 I2C功能描述 (195)20.4.1 串行时钟生成 (195)20.4.2 中断生成 (195)20.4.3 传输模式 (196)20.4.4 模式选择 (204)20.5 I2C寄存器 (205)20.5.1 I2C数据寄存器(I2C_I2CDAT) (205)20.5.2 I2C地址寄存器(I2C_I2CADR) (205)20.5.3 I2C控制寄存器(I2C_I2CCON) (206)20.5.4 状态寄存器(I2C_I2CSTA) (206)21 通用异步收发器(UART) (207)21.1 UART介绍 (207)21.2 UART主要特性 (207)21.3 UART功能概述 (207)21.3.1 UART 特性描述 (208)21.3.2 发送器 (209)21.3.3 接收器 (210)21.3.4 校验控制 (210)21.4 串口通讯模式说明 (211)21.4.1 方式1 (211)21.4.2 方式2 (212)21.4.3 方式3 (212)21.4.4 方式4 (213)21.5 UART中断请求 (214)21.6 UART模式配置 (214)21.7 UART寄存器 (214)21.7.1 UART功能配置寄存器(UART_UARTCON) (214)21.7.2 串口波特率发生寄存器(UART_SREL) (215)21.7.3 串口数据缓冲寄存器(UART_SBUF) (215)21.7.4 UART状态寄存器(UART_UARTSTA) (216)22 版本历史 (217)表3.1 RX32S11存储器映像和外设边界地址 (20)表4.1 Flash结构 (21)表5.1 低功耗模式一览 (26)表5.3睡眠模式进入和唤醒 (26)表5.2待机模式进入和唤醒 (27)表8.1 RX32S11向量表 (52)表10.1 ADC引脚 (60)表10.2 ADC通道 (60)表11.1 DMA通道请求列表 (71)表12.1 计数方向与编码器信号的关系 (111)表12.2 带刹车功能的互补输出通道OCx和OCxN的控制位 (132)表21.1 帧格式 (210)表21.2 UART中断请求 (214)表21.3 UART模式设置(1) (214)表22.1版本历史 (217)图3.1 存储器映像 (19)图5.1 电源框图 (24)图5.2 上电复位和掉电复位波形图 (25)图5.3 PVD门限 (25)图6.1 复位电路框图 (31)图6.2 时钟树 (32)图7.1 I/O端口位基本结构 (43)图7.2 输入浮空/上拉/下拉结构 (45)图7.3 输出框图 (45)图7.4 复用功能框图 (46)图7.5 模拟引脚框图 (47)图9.1 外部中断控制器框图 (54)图10.1 ADC框图 (60)图10.2 校准时序图 (62)图11.1 DMA框图 (69)图12.1 高级控制定时器框图 (77)图12.2 当预分频器的参数从1变成2时,计数器的时序图 (79)图12.3 当预分频器的参数从1变成4时,计数器的时序图 (79)图12.4 计数器时序图,内部时钟分频因子为1 (80)图12.5 计数器时序图,内部时钟分频因子为2 (81)图12.6 计数器时序图,内部时钟分频因子为4 (81)图12.7 计数器时序图,内部时钟分频因子为N (82)图12.8 计数器时序图,当ARPE=0时的更新事件(TIM8_ARR没有预装入) (82)图12.9 计数器时序图,当ARPE=1时的更新事件(预装入了TIM8_ARR) (83)图12.10 计数器时序图,内部时钟分频因子为1 (84)图12.11 计数器时序图,内部时钟分频因子为2 (84)图12.12 计数器时序图,内部时钟分频因子为4 (85)图12.13 计数器时序图,内部时钟分频因子为N (85)图12.14 计数器时序图,当没有使用重复计数器时的更新事件 (86)图12.15 计数器时序图,内部时钟分频因子为1,TIM8_ARR=0x6 (87)图12.16 计数器时序图,内部时钟分频因子为2 (87)图12.17 计数器时序图,内部时钟分频因子为4,TIM8_ARR=0x36 (88)图12.18 计数器时序图,内部时钟分频因子为N (88)图12.19 计数器时序图,ARPE=1时的更新事件(计数器下溢) (89)图12.20 计数器时序图,ARPE=1时的更新事件(计数器溢出) (89)图12.21 不同模式下更新速率的例子,及TIM8_RCR的寄存器设置 (90)图12.22 一般模式下的控制电路,内部时钟分频因子为1 (91)图12.23 TI2外部时钟连接例子 (92)图12.24 外部时钟模式1下的控制电路 (92)图12.25 外部触发输入框图 (93)图12.26 外部时钟模式2下的控制电路 (94)图12.27 捕获、比较通道(如:通道一输入部分) (94)图12.28 捕获/比较通道1的主电路 (95)图12.29捕获/比较通道的输出部分(通道1至3) (95)图12.30 捕获/比较通道的输出部分(通道4和5) (96)图12.31 PWM输入模式时序 (97)图12.32 输出比较模式,翻转OC1 (99)图12.33 边沿对齐的PWM波形(ARR=8) (100)图12.34 中央对齐的PWM波形(APR=8) (101)图12.35 边沿对齐向上计数的PWM波形(ARR=8) (102)图12.36 中央对齐的PWM波形(APR=8) (103)图12.37 带死区插入的互补输出 (104)图12.38 死区波形延迟大于负脉冲 (104)图12.39 死区波形延迟大于正脉冲 (105)图12.40 响应刹车的输出 (107)图12.41 清除TIM8的OCxREF (108)图12.42 产生六步PWM,使用COM的例子(OSSR=1) (109)图12.43 单脉冲模式的例子 (110)图12.44 编码器模式下的计数器操作实例 (112)图12.45 IC1FP1反相的编码器接口模式实例 (113)图12.46 霍尔传感器接口的实例 (114)图12.47 复位模式下的控制电路 (115)图12.48 门控模式下的控制电路 (116)图12.49 触发器模式下的控制电路 (116)图12.50 外部时钟模式2+触发模式下的控制电路 (117)图13.1 通用定时器框图 (142)图13.2 当预分频器的参数从1变到2时,计数器的时序图 (143)图13.3 当预分频器的参数从1变到4时,计数器的时序图 (144)图13.4 当计数器的值等于设定的周期寄存器溢出时,进入周期中断图 (145)图13.5 向上计数PWM输出波形图 (146)图13.6 向下计数PWM输出波形图 (147)图13.7 中央计数PWM输出波形图 (148)图14.1 运算放大器框图 (153)图15.1 比较器框图 (156)图15.2 比较器迟滞 (157)图15.3 比较器输出遮罩 (158)图16.1 ME框图 (165)图17.1 PID概念图 (184)图18.1 简化的RTC框图 (189)图19.1 看门狗框图 (192)图20.1 模块功能框图 (195)图20.2 I2C总线协议 (205)图21.1 UART框图 (208)图21.2 字长设置 (209)图21.3 方式1时串行发送数据时序 (211)图21.4 方式1时串行接收数据时序 (211)图21.5 方式2时串行发送数据时序 (212)图21.6 方式2时串行接收数据时序 (212)图21.7 方式3时串行发送数据时序 (212)图21.8 方式3时串行接收数据时序 (213)图21.9 方式4时串行发送数据时序 (213)图21.10 方式4时串行接收数据时序 (213)1简介本参考手册用于帮助开发者理解并使用睿兴科技(南京)有限公司(后文简称“睿兴”或“RX”)的芯片。
通力电梯KDL32调试培训课程
KDL32驱动装置的调试和安全检查目录1 简介--------------------------------------------------------32 电气安全----------------------------------------------------43 工具--------------------------------------------------------44 部件介绍----------------------------------------------------55 慢车调试----------------------------------------------------106 快车调试----------------------------------------------------187 精调--------------------------------------------------------218 安全检查----------------------------------------------------29附录 A--------------------------------------------------------53附录 B--------------------------------------------------------541. 简介1.1. 课程的有效性本课程针对的是配置KDL驱动装置的电梯的教材。
涉及的电梯有:KONE3000 S/X MiniSpaceKONE3000 MiniSpace1.2. 缩写词EBD=紧急电池驱动EPD=紧急供电运行ETS=紧急端站减速LBR=桥式整流LWD=称重设备NTS=正常端站减速RDF=回叫驱动功能2. 电气安全参照《电器安全指导》“在电梯上作业遵守 5 项电气安全方针”。
KDL 32调试
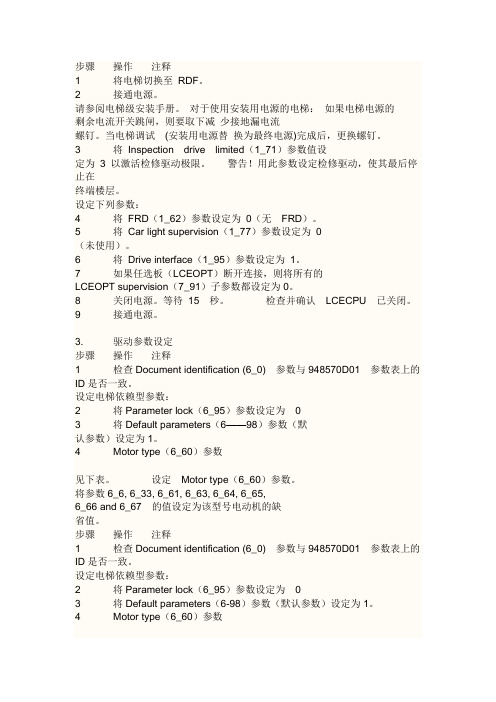
步骤操作注释1 将电梯切换至RDF。
2 接通电源。
请参阅电梯级安装手册。
对于使用安装用电源的电梯:如果电梯电源的剩余电流开关跳闸,则要取下减少接地漏电流螺钉。
当电梯调试(安装用电源替换为最终电源)完成后,更换螺钉。
3 将Inspection drive limited(1_71)参数值设定为3 以激活检修驱动极限。
警告!用此参数设定检修驱动,使其最后停止在终端楼层。
设定下列参数:4 将FRD(1_62)参数设定为0(无FRD)。
5 将Car light supervision(1_77)参数设定为0(未使用)。
6 将Drive interface(1_95)参数设定为1。
7 如果任选板(LCEOPT)断开连接,则将所有的LCEOPT supervision(7_91)子参数都设定为0。
8 关闭电源。
等待15 秒。
检查并确认LCECPU 已关闭。
9 接通电源。
3. 驱动参数设定步骤操作注释1 检查Document identification (6_0) 参数与948570D01 参数表上的ID是否一致。
设定电梯依赖型参数:2 将Parameter lock(6_95)参数设定为03 将Default parameters(6——98)参数(默认参数)设定为1。
4 Motor type(6_60)参数见下表。
设定Motor type(6_60)参数。
将参数6_6, 6_33, 6_61, 6_63, 6_64, 6_65,6_66 and 6_67 的值设定为该型号电动机的缺省值。
步骤操作注释1 检查Document identification (6_0) 参数与948570D01 参数表上的ID是否一致。
设定电梯依赖型参数:2 将Parameter lock(6_95)参数设定为03 将Default parameters(6-98)参数(默认参数)设定为1。
4 Motor type(6_60)参数见下表。
T1EL11E16KDL16驱动系统介绍rev1

课程描述目录第1章KDL16部件了解 ........................................................................................................................... - 2 -1.KDL16简介................................................................................................................................... - 2 -2.KDL16L部件介绍......................................................................................................................... - 3 -3.KDL16R部件介绍......................................................................................................................... - 4 -第2章KDL16驱动单元输入输出线检查................................................................................................ - 6 -第3章极性测试 ...................................................................................................................................... - 6 -第4章KDL16接地.屏蔽线检查.............................................................................................................. - 8 -第5章KDL16了解各电子板的输入输出信号、指示灯等.................................................................... - 9 -第6章KDL16常见故障处理.................................................................................................................. - 10 -第7章KDL16更换接触器.继电器........................................................................................................ - 10 -第8章KDL16参数设置 ......................................................................................................................... - 11 -第9章KDL16慢车调试 ......................................................................................................................... - 14 -第10章KDL16称重调试....................................................................................................................... - 15 -1.1称重概述 ....................................................................................................................... - 15 -1.2调节称重装置LWI ....................................................................................................... - 15 -1.3调节称重装置(LWD+LCEVTC) .................................................................................. - 16 -第11章KDL16快车调试......................................................................................................................... - 17 -1.1LWI距离感应装置的快车调试 .................................................................................... - 17 -1.2绳头称重(LWD+LCEVTC)的快车调试 ........................................................................... - 18 -1.3井道设置 ....................................................................................................................... - 18 -1.4复位LCE 参数 .............................................................................................................. - 19 -1.5检查轿厢和对重平衡(50 %负载) ........................................................................... - 19 -1.6检查轿厢和对重电气平衡(50 %负载) ................................................................... - 19 -1.7对LWD 操作进行微调 .................................................................................................. - 19 -1.8速度控制的调整 ........................................................................................................... - 20 -1.9KTW/Q 因数(100 %负载) ......................................................................................... - 20 -1.10急动或倒车 ................................................................................................................... - 21 -1.11绳重参数(50%负载) ................................................................................................. - 21 -1.12起动转矩比列(0%负载) ........................................................................................... - 22 -1.13轿厢电缆重量参数(0 % 负载)(对提升高度大于100 m)................................... - 22 -1.14P factor 和I factor调整 ....................................................................................... - 23 -1.150% 空载曳引测试 ......................................................................................................... - 23 -1.16轿厢50 %负载时的安全测试 ...................................................................................... - 24 -1.17轿厢100%负载时的安全测试 ...................................................................................... - 24 -1.18轿厢125%负载时的安全测试 ...................................................................................... - 25 -1.19单报闸电气制动测试(0 %负载) ............................................................................. - 26 -第1章KDL16部件了解1.KDL16简介KDL16驱动是目前推出的一种小巧实用的一种改进型驱动,它可以替换原来的V3F16L等驱动,可以用在Monospace,Xminispace,Sminispace等梯型上.该类驱动分KDL16L及KDL16R两种,根据不同的电梯配置要求可以配用不同的KDL16驱动类别,KDL16L与V3F16L外形非常相似,但KDL16R外形就要扁些了.该类驱动不能使用原来的Tacho测速发电机而只能使用专用的编码器。
S1-EL-11-E04 KDL16驱动系统新编教材rev1---精品管理资料

课程描述课程编号: S1-EL-11—E04#课程名称:KDL16驱动系统课程课程内容:KDL16驱动系统描述,信号及称重调试课程对象:通力工作一年以上,对通力电梯较为熟悉且有一定基础通过培训能系统的掌握KDL16驱动系统接线,部件结构,各课程目标:种信号及基本的称重调试方法所需设备:投影仪,白板,记号笔推荐课时: 4.7小时更新日:2011.1更新人: 田书强目录1.KDL16熟悉部件 ................................................... - 3 -1.1 KDL16驱动简介............................................. - 3 - 1.2 KDL16L部件介绍............................................ - 4 - 1.3 KDL16R部件介绍............................................ - 6 - 2 KDL16称重调试 ................................................... - 8 -2. 1称重概述................................................ - 8 -2。
2调节称重装置LWI ....................................... - 8 - 2。
3 调节称重装置(LWD+LCEVTC) .............................. - 9 -3 KDL16Encode。
Resolve极性检查 ................................... - 10 -4 KDL16接地.屏蔽线检查 ........................................... - 11 -5 KDL16接线检查完好 .............................................. - 12 -6 KDL16了解各电子版的输入输出信号.指示灯等 ....................... - 17 -1。
关于电机的毕业设计
关于电机的毕业设计【篇一:电机设计毕业论文】目录摘要 ....................................................................................................... .. (1)abstract ............................................................................................. . (1)第一章中小型电机设计概述 ....................................................................................................... . (2)1.1设计技术要求 ....................................................................................................... .. (2)1.2电机主要尺寸 ....................................................................................................... .. (2)1.3 绕组构及成原理 ....................................................................................................... (4)1.4主磁路 ....................................................................................................... .. (4)1.5电抗 ....................................................................................................... (6)1.6损耗与效率 ....................................................................................................... (7)1.7通风散热 ....................................................................................................... . (7)第二章三相异步电动机设计(y180l-6/15kw) (9)2.1电机主要尺寸及绕组设计 ....................................................................................................... (9)2.2电磁计算步骤与程序 ....................................................................................................... .. (9)第三章电机优化设计方案 ....................................................................................................... (28)3.1相关理论分析 ....................................................................................................... (28)3.2电磁调整方案 ....................................................................................................... (28)第四章 autocad简介及其绘图 ....................................................................................................... .. (30)4.1 autocad简介 ....................................................................................................... (30)4.2 autocad的基本功能 ....................................................................................................... (30)4.3 autocad绘图 ....................................................................................................... (31)总结 ....................................................................................................... . (32)参考文献: .................................................................................................... .. (32)附录(Ⅰ)外文资料原文及译文 ....................................................................................................... .. 34附录(Ⅱ)三设计方案结果 ....................................................................................................... . (39)三相鼠笼式异步电动机设计(y180l-6 /15kw)专业:电气工程极其自动化学号:02131107 学生姓名:刘常洲指导老师:肖倩华摘要异步电机是工农业生产中应用最广泛的电机。
KDL32驱动系统课程 rev1

16
S3-EL-11-E02
KDL32快车调试
▪ KTW/Q 系数设定(100%负载) ▪ 选择 RealTimeDisplay monitor selection(6_75)参数为27 ▪ 以额定速度从底层到顶层驱动轿厢,结束运行后记录LCECPU(375)
的值。以额定速度从顶层到底层驱动轿厢,结束运行后记录LCECPU (375)的值 ▪ 根据下面的算法设定KTW/Q factor(6_25)参数: ▪ KTW/Q factor =(在顶层时 LCECPU(375)的显示值+ 在底层时 LCECPU(375)的显示值)/ 2。
14
S3-EL-11-E02
KDL32快车调试
15
S3-EL-11-E02
▪ 对 LWD 操作进行微调
▪ 设定零载点和半载点。当轿厢位于距 离电梯井道中点最近的服务楼层时设 定零载点和半载点。在轿厢位于同一 楼层时执行全部载重调节。
▪ 电梯驱动到距离电梯井道中点最近的 服务楼层 ,选择LWD setup(6_74) 参数 ,按照额定重量的百分比输入 重量,按ACCEPT按钮确认该重量 , 将 Save(6_99)参数设定为1 。
6
S3-EL-11-E02
更换电子板
7
S3-EL-11-E02
更换电子板
8
S3-EL-11-E02
KDL32慢车调试
▪ 如何使用实时显示功能
9
S3-EL-11-E02
KDL32慢车调试
1. 旋转变压器角度的初始设定 • 旋转变压器角度自检
10
S3-EL-11-E02
KDL32慢车调试
• 检查旋转变压器角度并记录值
13
S3-EL-11-E02
KDL32的调试说明

5 驱动检修调试 ................................................................................................................................................. 16
2.1 一般工作安全 ....................................................................................................................................... 7 2.2 安装方法安全 ....................................................................................................................................... 8 工具 ................................................................................................................................................................. 10 组件介绍 ......................................................................................................................................................... 11 4.1 KDL32 驱动板 .................................................................................................................................... 11 4.2 控制柜,带 KDL32 驱动 ................................................................................................................. 12 4.3 曳引机铭牌 ......................................................................................................................................... 13 4.4 如何使用实时显示功能 ..................................................................................................................... 14 4.5 阅读详细故障代码 ............................................................................................................................. 15
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程描述
1 KDL3
2 称重调试................................................... - 2 -
1.1 LWD ........................................................ - 2 -
2 Encode,Resolve极性检查 .......................................... -
3 -
2.1检查RESOLVE 的极性 ......................................... - 3 -
2.2检查编码器的极性............................................ - 4 -
3 KDL32故障处理 ................................................... -
4 -
4 KDL32 更换其他部件.............................................. -
5 -
4.1 更换抱闸控制模块 ........................................... - 5 -
4.2 更换接触器模块部分 ........................................ - 5 - 4.3更换FRI-滤波器 ............................................ - 7 -
4 .4 KDL32 更换驱动风扇 ....................................... - 10 -
4.5更换动态制动接触器......................................... - 11 -
5 KDL32修改参数 .................................................. - 13 -
5.1请按下表中的步骤执行:..................................... - 13 -
5.2 Motor type(6_60)参数的值: .............................. - 14 -
6 KDL32 电子板.................................................... - 15 -
6.1控制板..................................................... - 15 -
1 KDL3
2 称重调试
注意!如果电梯在轿厢装潢尚未最终完工前就投入使用,则在最终完工后须重新设定轿厢称量。
请严格按照本工作顺序进行。
如果忘记哪一步或给值错误,则必须完全重新设定1.1 LWD
2 Encoder,Resolver极性检查2.1检查RESOLVER 的极性
2.2检查编码器的极性
3 KDL32故障处理
参考948570D02文件见附表
4 KDL32 更换其他部件4.1 更换抱闸控制模块
4.2 更换接触器模块部分
4.3更换FRI-滤波器
4 .4 KDL32 更换驱动风扇
4.5更换动态制动接触器
5 KDL32修改参数
5.1请按下表中的步骤执行:
5.2 Motor type(6_60)参数的值:
6 KDL32 电子板
6.1控制板
驱动控制板DCBM CPU KM890156G01
马达控制板DCBM MCB KM887283G01 主电路板和驱动板:
主电路板和驱动板MCDM, KM887286G01 电梯操作界面适配器板(LOP-ADA)
LOP-ADA board KM932637G01
主接触器控制板
Main contactor control board KM946240G01。