基于ADAMS的机床机械手动力学仿真研究
基于ADAMS的多关节机械手手抓部分的运动学仿真研究

的多关节机械手手抓部分的其中,nh是约束方程的个数;nc是广义坐标数。
于是可以得到系统速度的约束方程:(4)。
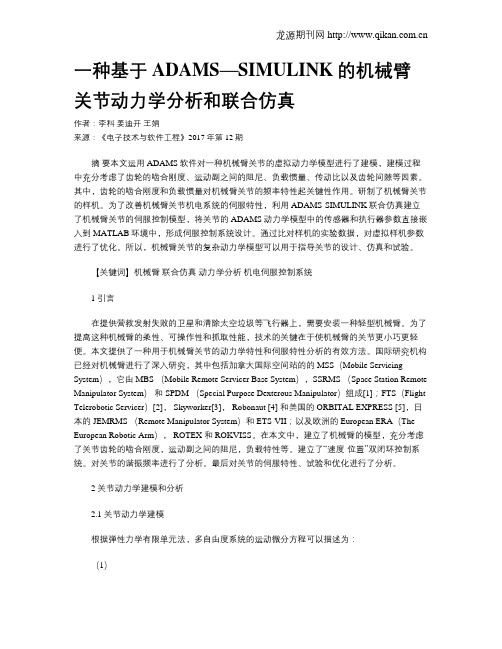
任意时刻t的速度,加速度可以由线性方程的数值方法求解,在ADAMS中通常采用图1 机械手三维装配三维模型的建立虚拟样机的三维模型的建立采用Solid完成,主要包括手抓、底座、大臂机构、小臂机构等,底座上有一电动机带动,实现大臂的转动。
大臂及其小臂的活动主要由液压缸带动,本文重点介绍机械手手抓部分的运动学分析,图2是机械手的三维装配图。
图2 手抓部分装配图立模型过程中遵循的原则。
建立模型之后,导入ADAMS化处理,在满足虚拟样机仿三维模型的建立要尽可能地数量应该尽可能的少,只保留基本的运动部件。
(2)机械手的结构及其分析。
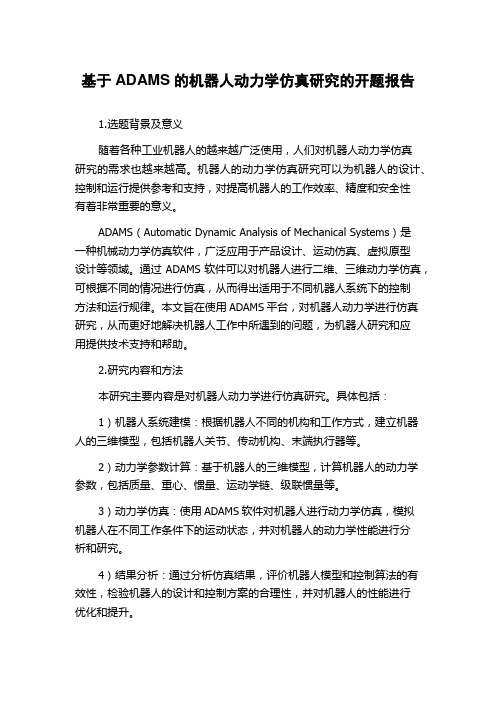
本机械手实现的运动是平均每分钟抓取4次,旋转的角度是是机械手的机构运动简图,电动机带动齿轮转动,实现底座的转动,抓取物料时,由手抓图3 机械手机构运动简图机械手手抓的模型简化及其导入ADAMS中遵循模型的简化原则,将手抓的三维模型简化,模型建立部分使用Solid Edge ST5实现,ADAMA/View提供的Parasolid模型数据交换接口,将模ADAMS软件中。
导入后为模型的每个零件重命名和添加材料属性(steel)。
鉴于本文只研究机械手手抓部分的运动,故将删除了模型中与小臂链接的链接底座、前后缸盖以及套筒等的结构,完成简化后,为了使各个相对运动的部分形成有机的整体,根据构件之间相对运动,在模型中的利用ADAMS/View中的约束工具为各个构件之间引入约束。
图为导入ADAMS后的模型图。
图4 手抓简化仿真模型机械手手抓部分的仿真 机械手的手抓部分是机械手设计的重要部分,也是实现机械工作的必要条件,设计的目的是机械手每分钟中国设备工程 2024.04(下)图5 机械手手抓部分约束的添加机械手的整个驱动部分选用气压驱动,其中包括大小臂的运动以及手抓的张合,液压驱动最大优点是单位质量输出功率大,因为液压传动的动力元件可以达到很高的工作压力,在同等输出功率下具有体积小、质量轻、运动惯性小、动态性能好的特点。
基于ADAMS的机械四连杆机构运动仿真分析

基于ADAMS的机械四连杆机构运动仿真分析机械四连杆机构是一种常用的机构形式,它广泛应用于各种机械设备中,如汽车发动机、机床、机器人和机械手等。
本文基于ADAMS软件,对机械四连杆机构进行运动仿真分析,并对仿真结果进行分析和讨论。
一、ADAMS软件介绍ADAMS是一款专门用于多体动力学仿真分析的商业软件,它可以用来仿真各种机械系统的动力学特性,包括车辆、飞机、机器人以及各种机械机构等,还可以分析机构的运动轨迹、速度、加速度、力矩等参数。
在本文中,我们将利用ADAMS软件对机械四连杆机构进行仿真分析,探究机构的运动规律和特性。
二、机械四连杆机构的结构和运动特性机械四连杆机构由四个连杆组成,其中两个连杆为机构的输入和输出轴,另外两个连杆则起到连接作用。
机构的结构如图1所示。
图1 机械四连杆机构结构示意图机械四连杆机构的运动特性与其连杆长度、角度以及连接方式等因素密切相关,下面我们将对机构的运动特性进行详细的分析。
1. 运动自由度机械四连杆机构的运动自由度为1,即只有一维平动或旋转方向。
2. 平衡性机械四连杆机构具有良好的平衡性,可以在很大程度上减小机构的惯性力,提高机构的稳定性。
3. 运动规律机械四连杆机构的运动规律比较复杂,难以用解析方法进行求解。
通常采用动力学仿真和实验方法,对机构的运动规律进行研究和分析。
为了探究机械四连杆机构的运动规律和特性,我们利用ADAMS软件对机构进行仿真分析。
仿真模型如图2所示。
在仿真过程中,我们可以通过改变机构的输入参数,如连杆长度、连杆角度等,来观察机构的运动规律和特性。
下面我们将举例说明。
1. 连杆长度变化时机构的运动规律改变机构的输入连杆长度,可以观察到机构的运动规律发生了显著的变化。
当输入连杆长度L1=100mm、L2=200mm时,机构的运动规律如图3所示。
图3 机构运动规律图(L1=100mm、L2=200mm)从图3中可以看出,当输入连杆开始旋转时,机构的输出连杆也随之旋转,但是旋转速度比输入连杆慢,这是由于机构的连杆长度不同,导致机构的角度运动不同所致。
基于ADAMS六自由度机械手的动力学分析与仿真

置 。它可代替 人 的繁 重 劳 动 以实 现 生 产 的机 械 化 和 自动 化 , 能 在有 害环 境下 操 作 以确保 人 身 安 全 , 因而 广 泛应 用 于机械 制造 、 冶金 、 电子 、 轻工 和原 子能等 部
门。工业机械手的性能, 要求不断提高工作精度和作 业 速度 , 增加 机构 的 自由度 , 提高 通用性 和灵 活性 , 同 时还 要求 降低成 本 , 控制简单 , 安 全可 靠 。利 用 虚 拟
固定程 序抓 取 、 搬 运 物 件 或 操 作 工 具 的机 械 电 子 装
动 力学 问题 , 主要是 为 了解决 机器人 的控 制 问题 。
2 . 1 机械 手 的三维 模型
Hale Waihona Puke 由P r o / E对机 械 手进行 建模 , 如图 1 所示 , 机 械 手 为六 自 由度 串 联 关 节 型 结构 , 由腰 关 节 、 肩关节 、 肘 关节、 腕关 节 1 、 腕关 节 2 、 腕关 节 3组 成 , 6个 关 节 均
Ab s t r ac t :I n t h e pa p e r , a d y n a mi c s mo d e l o f 6-DOF ma n i p ul a t o r i s b ui l t b y u s i n g L a g r a n g e me t ho d .I t a l s o b ui l d s t h e 3D
摘
要: 采用拉 格朗 日方法建立 了一种六 自由度机械 手的动力学模 型。利 用 P r o / E软件 建立机械 手的三维模 型, 将其
导入 到 A D A M S软件 中进行动 力学仿真 , 得 出各个关节的 力矩、 速度 、 加速度和 各关 节转 角的关 系曲线 , 为机 械手控
用adams分析3r机械手的运动仿真

基于SolidWorks和ADAMS的3R机械手运动仿真本文利用SolidWorks软件对所设计三自由度机械手进行三维实体建模,然后通过SolidWorks和ADAMS良好的数据接口将模型数据直接导入ADAMS,根据实际设计要求添加相关约束,在此基础上进行运动仿真,研究机械手各机构关节的运动,测量各个关节的关节角位移、速度、加速度和驱动力矩的变化情况,通过观察各机构的运动轨迹以及相关曲线的变化趋势确定设计中存在的问题,对设计阶段的产品进行虚拟性能测试。
1 . 3R机械手的三维实体模型1.1利用SolidWorks建立机械手的三维实体模型本文所研究的三自由度机械手由臂1,臂2,臂3和手爪组成,臂1与大地固结在一起,其装配效果图如图1所示。
图1 机械手装配模型1.2三维模型的导入首先在SolidWorks环境下将机械手装配模型保存为“.x_t”格式,然后在ADAMS 中执行[import]导入刚才生成的“.x_t”文件。
导入的模型没有质量,需要自己添加,在ADAMS中分别定义各零件材料属性为“steel”。
2 . ADAMS运动仿真机械手在运动过程中要尽量平滑、平稳,否则会产生机械部件的磨损加剧,并导致机械手的振动和冲击。
因此在仿真过程中测量各个关节的关节角位移、速度、角加速度和驱动力矩的变化情况。
将模型各零部件导入ADAMS软件中后,各个构件之间还没有任何的约束,模型只是提供了各构件的初始位置。
本机械手两两相邻的构件构成的三个关节都是转动关节,均定义为旋转副,底座与大地之间定义为固定副。
添加完约束后的模型如图2所示。
图2 ADAMS环境下机械手仿真模型本文为机械手设置运动路径,已知路径求解各关节的驱动和力矩和转角运动情况。
设图中球的运动角速度如下图3:图3 球的运动角速度设定添加一个运动平面,设定机械手完成上料过程,现设路径如下图4,图4 机械手的运动轨迹至此建立起了机械手完整仿真模型,然后进行5s、50步的仿真。
一种基于ADAMS—SIMULINK的机械臂关节动力学分析和联合仿真
一种基于ADAMS—SIMULINK的机械臂关节动力学分析和联合仿真作者:李科姜迪开王娟来源:《电子技术与软件工程》2017年第12期摘要本文运用ADAMS软件对一种机械臂关节的虚拟动力学模型进行了建模,建模过程中充分考虑了齿轮的啮合刚度、运动副之间的阻尼、负载惯量、传动比以及齿轮间隙等因素。
其中,齿轮的啮合刚度和负载惯量对机械臂关节的频率特性起关键性作用。
研制了机械臂关节的样机。
为了改善机械臂关节机电系统的伺服特性,利用ADAMS-SIMULINK联合仿真建立了机械臂关节的伺服控制模型,将关节的ADAMS动力学模型中的传感器和执行器参数直接嵌入到MATLAB环境中,形成伺服控制系统设计。
通过比对样机的实验数据,对虚拟样机参数进行了优化。
所以,机械臂关节的复杂动力学模型可以用于指导关节的设计、仿真和试验。
【关键词】机械臂联合仿真动力学分析机电伺服控制系统1 引言在提供营救发射失败的卫星和清除太空垃圾等飞行器上,需要安装一种轻型机械臂。
为了提高这种机械臂的柔性、可操作性和抓取性能,技术的关键在于使机械臂的关节更小巧更轻便。
本文提供了一种用于机械臂关节的动力学特性和伺服特性分析的有效方法。
国际研究机构已经对机械臂进行了深入研究,其中包括加拿大国际空间站的的MSS(Mobile Servicing System),它由MBS (Mobile Remote Servicer Base System),SSRMS (Space Station Remote Manipulator System)和 SPDM (Special Purpose Dexterous Manipulator)组成[1];FTS(Flight Telerobotic Servicer)[2], Skyworker[3], Robonaut [4] 和美国的 ORBITAL EXPRESS [5],日本的 JEMRMS (Remote Manipulator System)和ETS-VII;以及欧洲的European ERA(The European Robotic Arm), ROTEX 和 ROKVISS。
基于ADAMS的五自由度机械手的设计及运动学仿真

机 械 手 运 动 学 分 为 两 类 基 本 问题 :一 类 是运 动 学正 问题 ,根 据 已知 的 各项 参 数 求 解末 端 执行 器 相 对 于 绝对 坐 标 系 的位 置 和 姿 态 ; 另一 类是 运 动 学 逆 问题 ,根 据 已给 定 的满 足 工 作 要 求 时末 端 执 行 器 相 对 于 绝 对 坐 标 系 的位 置 和 姿 态 以及 结 构 参 数 ,求 各 连 杆 以及 运 动 副 的运 动 参 数 。 由于 已 知 末 端 执 行 器 的位 置 和 姿 态 , 因此 可 通 过 机 械 手 逆运 动 学方 程对 本机 械 手进 行求 解 。
1.2 机械手结构参数 根 据 其 使 用 要 求 , 机 械 手 的 旋 转 半 径
R=1 3 1 m m , 抓 取 时 末 端 执 行 器 距 离 平 台 H。=100mm,基 座在 旋 转时 末端 执 行器 距 离平 台为 Hl:110mm。为达 到其 使用 要 求 ,大 臂LI=110mm, 小臂L2=60mm,腕部L3=75mm。
l 匐 似
基于ADAMS的五 自由度机械手的设计及运动学仿真
Design and kinem atics sim ulation of m anipulator w ith f ive degrees of
freedom based on A 队 M S
陈向伟,高 强 ,肖 冰
CHEN Xiang.wei, GAO Qiang,XIAO Bing
0 引言
机 械 手 是 具 有 传 动 执 行 装 置 的 机 械 , 它 由 臂 、关 节 和 末 端 执 行 装 置 构 成 ,组 合 为 一 个 相 互 连 接 和 相 互 依 赖 的运 动 机 构 ,且 具 有 可 改 变 的 和 反 复 编 程 的 自动 机 械 装 置 ,是 机 器 人 核 心 部 件 之 一 。 近 年 来 随 着 工 业 自动 化 以 及 信 息 化 的 发 展 , 机 械 手 被 广 泛 应 用 于 各 个 领 域 ,在 高 温 、 高 压 和 粉 尘 等 各 种 恶 劣 的 作 业 环 境 中 以及 一 些具 有 危 险 性 的场合 它 可以代 替人 连续 的工 作 。它已经 成为 实 现 生产过 程 自动化 ,提 高 劳动 生产 率和 实现 安全 生 产 不可 缺少 的 自动 化设 备 ,因此分析 和 研究机 械 手 在失 重法 飞灰 测碳仪 中的应 用是 非常必 要 的。
基于ADAMS的机器人动力学仿真研究的开题报告
基于ADAMS的机器人动力学仿真研究的开题报告1.选题背景及意义随着各种工业机器人的越来越广泛使用,人们对机器人动力学仿真研究的需求也越来越高。
机器人的动力学仿真研究可以为机器人的设计、控制和运行提供参考和支持,对提高机器人的工作效率、精度和安全性有着非常重要的意义。
ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一种机械动力学仿真软件,广泛应用于产品设计、运动仿真、虚拟原型设计等领域。
通过ADAMS软件可以对机器人进行二维、三维动力学仿真,可根据不同的情况进行仿真,从而得出适用于不同机器人系统下的控制方法和运行规律。
本文旨在使用ADAMS平台,对机器人动力学进行仿真研究,从而更好地解决机器人工作中所遇到的问题,为机器人研究和应用提供技术支持和帮助。
2.研究内容和方法本研究主要内容是对机器人动力学进行仿真研究。
具体包括:1)机器人系统建模:根据机器人不同的机构和工作方式,建立机器人的三维模型,包括机器人关节、传动机构、末端执行器等。
2)动力学参数计算:基于机器人的三维模型,计算机器人的动力学参数,包括质量、重心、惯量、运动学链、级联惯量等。
3)动力学仿真:使用ADAMS软件对机器人进行动力学仿真,模拟机器人在不同工作条件下的运动状态,并对机器人的动力学性能进行分析和研究。
4)结果分析:通过分析仿真结果,评价机器人模型和控制算法的有效性,检验机器人的设计和控制方案的合理性,并对机器人的性能进行优化和提升。
3.研究计划1)文献调研和分析:通过系统地调研前人研究,分析机器人动力学仿真的发展现状和存在的问题,确定研究方向和目标。
2)机器人系统建模:根据机器人的不同应用场景,建立机器人的三维模型,包括机器人关节、传动机构等组成部分。
3)动力学参数计算:根据机器人的三维模型,计算机器人的动力学参数,建立机器人的动力学模型。
4)动力学仿真:运用ADAMS 软件对机器人进行动力学仿真,模拟机器人不同工作情况下的运动状态,包括复杂工作状态和非理想工作情况。
基于ADAMS的机器人动力学分析及轨迹规划
基于ADAMS的机器⼈动⼒学分析及轨迹规划2.1 串联机器⼈在ADAMS中⽤连杆模拟机械臂,对两⾃由度的机械臂分别进⾏运动学分析、动⼒学分析及机械臂的轨迹规划。
2.1.1 运动学分析下⾯是建⽴模型并对模型进⾏设置分析的详细过程。
(1) 启动ADAMS/View,在欢迎对话框中选择新建模型,模型取名为Robot_arm,并将单位设置为MMKS,然后单击OK。
(2) 打开坐标系窗⼝。
按下F4键,或者单击菜单【View】→【Coordinate Window】后,打开坐标系窗⼝。
当⿏标在图形区移动时,在坐标窗⼝中显⽰了当前⿏标所在位置的坐标值。
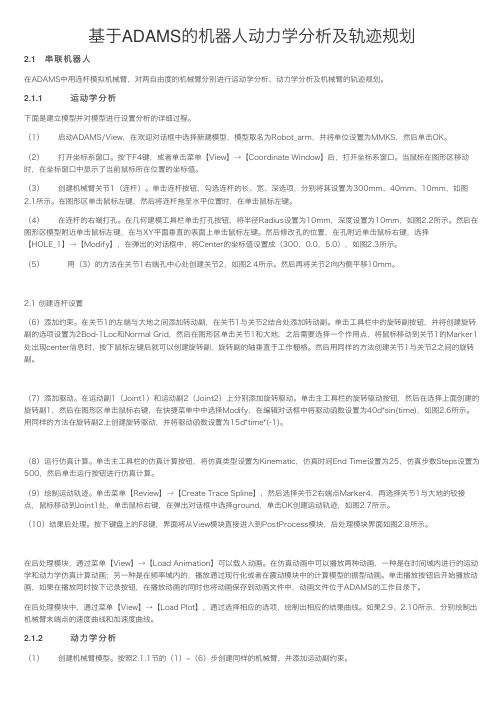
(3) 创建机械臂关节1(连杆)。
单击连杆按钮,勾选连杆的长、宽、深选项,分别将其设置为300mm、40mm、10mm,如图2.1所⽰。
在图形区单击⿏标左键,然后将连杆拖⾄⽔平位置时,在单击⿏标左键。
(4) 在连杆的右端打孔。
在⼏何建模⼯具栏单击打孔按钮,将半径Radius设置为10mm,深度设置为10mm,如图2.2所⽰。
然后在图形区模型附近单击⿏标左键,在与XY平⾯垂直的表⾯上单击⿏标左键。
然后修改孔的位置,在孔附近单击⿏标右键,选择【HOLE_1】→【Modify】,在弹出的对话框中,将Center的坐标值设置成(300,0.0,5.0),如图2.3所⽰。
(5) ⽤(3)的⽅法在关节1右端孔中⼼处创建关节2,如图2.4所⽰。
然后再将关节2向内侧平移10mm。
2.1 创建连杆设置(6)添加约束。
在关节1的左端与⼤地之间添加转动副,在关节1与关节2结合处添加转动副。
单击⼯具栏中的旋转副按钮,并将创建旋转副的选项设置为2Bod-1Loc和Normal Grid,然后在图形区单击关节1和⼤地,之后需要选择⼀个作⽤点,将⿏标移动到关节1的Marker1处出现center信息时,按下⿏标左键后就可以创建旋转副,旋转副的轴垂直于⼯作栅格。
然后⽤同样的⽅法创建关节1与关节2之间的旋转副。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于ADAMS的机床机械手动力学仿真研究
文章以某企业自动化上下料机床机械为研究目标,构建了简化的机床机械手模型,然后把该模型导入到ADAMS进行后续的约束和驱动添加,从而获得机械手的虚拟样机。
并通过运动仿真模拟了机械手关节的运动曲线,结果表明所建立模型正确性与合理性,为后续研究奠定了基础。
标签:机床机械手;ADAMS;动力学仿真
在现今的高端智能装备制造业中,机器人(机械手)是一种极其重要的智能化装备。
机器人的诞生将使生产率得以显著提高、工作环境得以改善等。
所以对机器人的研究意义非凡。
许多国内外学者已在机械手控制、设计等相关方面做了大量的研究工作[1-5]。
基于ADAMS软件,文章对机床机械手动力学进行仿真,仿真结果表明所构建三维模型合理性及正确性,为为后续研究奠定了基础。
1 应用背景及功能分析
从某企业的实际出发,分析机床机械手完成的功能如下:机床机械手将毛坯件从物料板或者物料箱中取出,放置于机床A中,将机床A加工好的机械手放置于机床B中,将机床B加工好的零件取出,放置到成品车上,完成一个循环。
2 基于ADAMS的机床机械手动力学仿真
2.1 模型构建
在ADAMS中构建复杂的三维模型比较困难,因此,在保证功能的前提下,首先构建了简化的机床机械手模型,如图1所示。
2.2 动力学仿真分析
将三维模型导入到ADAMS中,将相应的运动副约束和驱动约束添加到模型中,如图2所示。
经仿真后得到机械手各关节位移变化的曲线(图3)、各关节力变化的曲线(图4)、各关节角加速度变化的曲线(图5)。
从仿真结果可以看出,机械手的各个关节的运动比较平稳,角位移、角加速度和关节力的变化曲线变化比较平缓,由此证明了所设计的机床机械手结构是比较合理的。
3 结束语
通过对机床机械手的运动学仿真分析,使机床机械手的整个运动功能直观,
同时得到了各关节的驱动力、各关节的位移、角加速度变化曲线。
该结果可以为机械手的轨迹控制与规划提供基础;另外,通过仿真可以带来设计过程的简化、开发费用的减少、设计周期的缩短等诸多好处,并为下一步机械手的智能控制提供了一定的参考。
参考文献
[1]黄金风.MSRS和ODE环境下POWERCUBE模块化机械手的仿真研究[D].大连:大连交通大学,2010.
[2]张明辉,禚宝海.Diamond并联机械手动力学仿真的Simulink实现[J].山东科技大学学报:自然科学版,2010,29(1):90-94.
[3]刘淑英,张明路,韩慧伶.五自由度机械手动力学分析与仿真[J].河北工业大学学报,2009,38(2):32-36.
[4]Muller A,Hufnagel T. Model-based control of redundantly actuated parallel manipulators in redundant coordinates. Robotics and Autonomous Systems,2012,60(1):563-71.
[5]王霞,李占君,王平.基于ADAMS的六自由度机械手的运动仿真分析[J].矿山机械,2010,38(8):28-31.
作者简介:魏书平,女,安徽工程大学本科生。