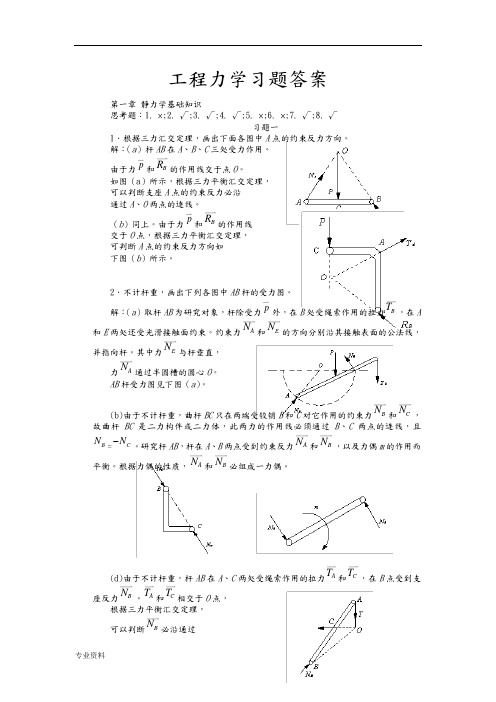
电力学院工程力学 第14章点的复合运动-习题
工程力学(运动学与动力学)14点的复合运动

绝对运动的分析方法
绝对运动
描述一个物体相对于绝对空间的运动, 是物体在固定参考系中的位置和速度。
VS
分析方法
通过绝对坐标系和相对坐标系之间的关系 ,分析物体的绝对运动。
复合运动的合成定理
合成定理
将相对运动和牵连运动结合起来,描述一个 物体在复合运动中的位置和速度。
应用范围
适用于分析复杂机械系统中的运动关系,如 机床、机器人等。
要点二
弹性体在振动时发生的形变
例如,振动的弦或振动的梁,在振动过程中发生的形变可 以通过动力学方程进行描述。这种形变是由于弹性体内部 分子之间的相互作用以及外力作用共同作用的结果。
感谢您的观看
THANKS
平面内两个旋转运动的复合
例如,搅拌机的搅拌叶片,既围绕中心轴做旋转运动 ,同时又围绕自身的轴线做旋转运动。这种复合运动 可以通过引入角速度和角加速度的概念进行描述。
空间内复合运动的实例分析
空间内旋转与直线运动的 复合
例如,直升机的螺旋桨,在围绕自身轴线旋 转的同时,直升机机体沿着垂直方向做直线 运动。这种运动可以通过三维坐标系进行描 述,并运用相应的运动学和动力学公式进行 分析。
空间运动
物体在三维空间中的运动,其轨迹位 于三维空间中。
定轴转动与定平台转动
定轴转动
物体绕固定轴线的转动,轴线位置固定不变。
定平台转动
物体绕固定平面上某点的转动,平面位置固定不变。
刚体运动与弹性体运动
刚体运动
物体在运动过程中形状和大小保持不 变。
弹性体运动
物体在运动过程中发生弹性形变,恢 复原状后继续运动。
工程力学(运动学与动力学 14点的复合运动
目录
• 复合运动的概述 • 复合运动的分类 • 复合运动的运动学分析 • 复合动力学的分析方法 • 复合运动的实例分析
大学《工程力学》课后习题解答-精品
大学《工程力学》课后习题解答-精品2020-12-12【关键字】情况、条件、动力、空间、主动、整体、平衡、建立、研究、合力、位置、安全、工程、方式、作用、结构、水平、关系、分析、简化、倾斜、支持、方向、协调、推动(e)(c)(d)(e)’CD2-2 杆AC 、BC 在C 处铰接,另一端均与墙面铰接,如图所示,F 1和F 2作用在销钉C 上,F 1=445 N ,F 2=535 N ,不计杆重,试求两杆所受的力。
解:(1) 取节点(2) AC 与BC 2-3 水平力F A 和D 处的约束力。
解:(1) 取整体(2) 2-4 在简支梁,力的大小等于20KN ,如图所示。
若解:(1)(2)求出约束反力:2-6 如图所示结构由两弯杆ABC 和DE 构成。
构件重量不计,图中的长度单位为cm 。
已知F =200 N ,试求支座A 和E 的约束力。
解:(1) 取DE (2) 取ABC2-7 在四连杆机构ABCD 试求平衡时力F 1和F 2解:(1)取铰链B (2) 取铰链C 由前二式可得:F FF ADF2-9 三根不计重量的杆AB,AC,AD在A点用铰链连接,各杆与水平面的夹角分别为450,,450和600,如图所示。
试求在与O D平行的力F作用下,各杆所受的力。
已知F=0.6 kN。
解:(1)间汇交力系;(2)解得:AB、AC3-1 已知梁AB 上作用一力偶,力偶矩为M ,梁长为l ,梁重不计。
求在图a ,b ,c 三种情况下,支座A 和B 的约束力解:(a) (b) (c) 3-2 M ,试求A 和C解:(1) 取 (2) 取 3-3 Nm ,M 2解:(1)(2) 3-5 大小为AB 。
各杆 解:(1)(2)可知:(3) 研究OA 杆,受力分析,画受力图:列平衡方程:AB A3-7 O1和O2圆盘与水平轴AB固连,O1盘垂直z轴,O2盘垂直x轴,盘面上分别作用力偶(F1,F’1),(F2,F’2)如题图所示。
工程力学-点的复合运动的矢量法求解

l
2
A
30º vAa
l
vBa vDr1 vAa vDAa
2l0 ?
3
2l0 ?
在杆AD方向的轴上投影
vBe2vBa
2l0
3
cos
30
vDr1
cos
30
2l0
cos
求出 vDr1 0
60
动系2 O
60º 即套筒D相对 于杆 BC的速度为零。 故 vDa vDe1 vDr1 vDe1 vBa
而套筒B相对于杆OA的速度由B点速度合成关系(3) 求出 vBr 2 vBe2 tan 30 l0 3 / 3 (方向如图)故 vD,OA vBr 2
即套筒D相对于杆OA的速度大小为 l0 3 / 3,方向由B指向A
O
3. 速度分析
绝对速度va:大小未知,方向沿 杆AB,设为向上
牵连速度ve:ve= v0,方向水平
向右
v0
相对速度vr:大小未知,方向沿
x'
凸轮圆周的切线
n
例题
§3 复合运动
例题1
B
应用速度合成定理
方向 ✓ 大小 ?
✓✓
v0
?
vr
φ
va
A
R
ve
v0
φ
n
()
例题
例题1
§3 复合运动
讨论一
若取凸轮 上与顶杆的重 合点A1为动点, 动系固连顶杆 AB,则相对 运动轨迹是什 么曲线?
由于杆上总有一点与槽壁接触,相当于在槽壁上C点 处安有一可绕C点定轴转动的套筒,杆穿过套筒运动。 且套筒 C的角速度与杆的角速度、角加速度相同。
动点:杆上的A点 动系:固连于套筒C 动系的牵连运动:绕C轴的定轴转动
点的复合运动

点的合成运动
y’
o’
x’
例2、直升飞机在匀速前进的军舰上降落
y
y’
o’
x’
x
o
点的合成运动
y’ x’
o’
物体的运动的描述结果与所选定的参考系有关。同一物体的运动,在不同的 参考系中看来,可以具有极为不同的运动学特征(具有不同的轨迹、速度、 加速度等)。
相对运动:未知
3、
va ve vr
大小 v1 v2
?
方向 √ √
?
vr va2 ve2 2vave cos60 3.6 m s
arcsin(ve sin 60o ) 46o12
点的合成运动
vr
求解合成运动的速度问题的一般步骤为(P180):
① 选取动点,动系和静系。
B
曲柄-滑块机构
点的合成运动
思考题 动 点:杆上A点。 动系:固连于滑块B。 定系:固连于墙面。 绝对运动? 相对运动? 牵连运动?
点的合成运动
A Bv
点的合成运动
动 点? 动参考系? 绝对运动? 相对运动? 牵连运动?
练习题1
点的合成运动
点的合成运动
点的合成运动
动 点? 动参考系? 绝对运动? 相对运动? 牵连运动?
定系的速度。
点的合成运动
基本概 念
牵连点的概念
(1)、定 义 动参考系给动点直接影响的是该动系上与动点相重合的一点,
这点称为瞬时重合点或动点的牵连点。 (2)、进一步说明
牵连运动一方面是动系的绝对运动,另一方面对动点来说起 着“牵连”作用。但是带动动点运动的只是动系上在所考察的瞬 时与动点相重合的那一点,该点称为瞬时重合点或牵连点。 (3)、注 意
工程力学(天津大学)第14章答案

第十四章 组合变形习 题14−1 截面为20a 工字钢的简支梁,受力如图所示,外力F 通过截面的形心,且与y 轴成φ角。
已知:F =10kN ,l =4m ,φ=15°,[σ]=160MPa ,试校核该梁的强度。
解:kN.m 104104141=⨯⨯==Fl M kN.m;58821510kN.m;65991510.sin φsin M M .cos φcos M M y z =⨯===⨯==查附表得:33cm 531cm 237.W ;W y z ==122.9MPa Pa 109122105311058821023710569966363=⨯=⨯⨯+⨯⨯=+=--....W M W M σy y z z max[]σσmax <,强度满足要求。
14−2 矩形截面木檩条,受力如图所示。
已知:l =4m ,q =2kN/m ,E =9GPa ,[σ]=12MPa ,4326'= α,b =110mm ,h =200mm ,1][=f。
试验算檩条的强度和刚度。
z解:kN.m 4421122=⨯⨯==ql M kN.m;789143264kN.m;578343264.sin φsin M M .cos φcos M M y z ='⨯==='⨯== m ...W ;m ...W y z 42421003341102206110333722011061--⨯=⨯⨯=⨯=⨯⨯=MPa 329Pa 1032910033410789110333710578364343......M M σy y z z max=⨯=⨯⨯+⨯⨯=+=-- []σσmax <,强度满足要求。
m...sin EI φsin ql f m...cos EI φcos ql f y y zz 339434339434109314110220121109384432641025384510034922011011093844326410253845--⨯=⨯⨯⨯⨯⨯'⨯⨯⨯⨯==⨯=⨯⨯⨯⨯⨯'⨯⨯⨯⨯==mm ..f f f y z 4517104517322=⨯=+=-20012291<=l f ,所以挠度满足要求。
工程力学第14章答案
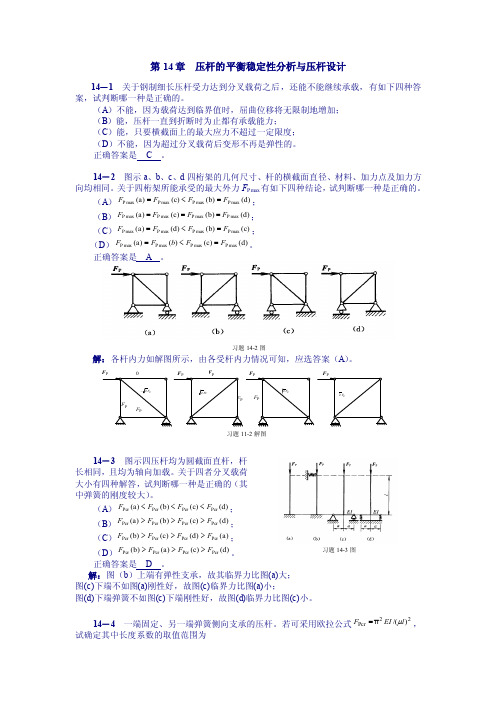
习题14-2图习题14-3图第14章 压杆的平衡稳定性分析与压杆设计14-1 关于钢制细长压杆受力达到分叉载荷之后,还能不能继续承载,有如下四种答案,试判断哪一种是正确的。
(A )不能,因为载荷达到临界值时,屈曲位移将无限制地增加; (B )能,压杆一直到折断时为止都有承载能力;(C )能,只要横截面上的最大应力不超过一定限度; (D )不能,因为超过分叉载荷后变形不再是弹性的。
正确答案是 C 。
14-2 图示a 、b 、c 、d 四桁架的几何尺寸、杆的横截面直径、材料、加力点及加力方向均相同。
关于四桁架所能承受的最大外力F Pmax 有如下四种结论,试判断哪一种是正确的。
(A ))d ()b ()c ()a (max P max P max P max P F F F F =<=; (B ))d ()b ()c ()a (max P max P max P max P F F F F ===; (C ))c ()b ()d ()a (max P max P max P max P F F F F =<=;(D ))d ()c ()()a (max P max P max P max P F F b F F =<=。
正确答案是 A 。
14-3 图示四压杆均为圆截面直杆,杆长相同,且均为轴向加载。
关于四者分叉载荷大小有四种解答,试判断哪一种是正确的(其中弹簧的刚度较大)。
(A ))d ()c ()b ()a (Pcr Pcr Pcr Pcr F F F F <<<; (B ))d ()c ()b ()a (Pcr Pcr Pcr Pcr F F F F >>>; (C ))a ()d ()c ()b (Pcr Pcr Pcr Pcr F F F F >>>;(D ))d ()c ()a ()b (Pcr Pcr Pcr Pcr F F F F >>>。
《工程力学》课后习题与答案全集
由 ,作出速度平行四边形,如图示:
即:
7.图示平行连杆机构中, mm, 。曲柄 以匀角速度 2rad/s绕 轴转动,通过连杆AB上的套筒C带动杆CD沿垂直于 的导轨运动。试示当 时杆CD的速度和加速度。
解:取CD杆上的点C为动点,AB杆为动系。对动点作速度分析和加速度分析,如图(a)、(b)所示。图中:
解:设该力系主矢为 ,其在两坐标轴上的投影分别为 、 。由合力投影定理有:
=-1.5kN
kN
kN
;
由合力矩定理可求出主矩:
合力大小为: kN,方向
位置: m cm,位于O点的右侧。
2.火箭沿与水平面成 角的方向作匀速直线运动,如图所示。火箭的推力 kN与运动方向成 角。如火箭重 kN,求空气动力 和它与飞行方向的交角 。
(d)由于不计杆重,杆AB在A、C两处受绳索作用的拉力 和 ,在B点受到支座反力 。 和 相交于O点,
根据三力平衡汇交定理,
可以判断 必沿通过
B、O两点的连线。
见图(d).
第二章力系的简化与平衡
思考题:1.√;2.×;3.×;4.×;5.√;6.×;7.×;8.×;9.√.
1.平面力系由三个力和两个力偶组成,它们的大小和作用位置如图示,长度单位为cm,求此力系向O点简化的结果,并确定其合力位置。
则
(mm/s)
故 =100(mm/s)
又有: ,因
故:
即:
第四章刚体的平面运动
思考题
1.×;2.√; 3.√;4.√;5.×.
习题四
1.图示自行车的车速 m/s,此瞬时后轮角速度 rad/s,车轮接触点A打滑,试求点A的速度。
工程力学-复合运动

O1 e2
大小 vCD O1B·O1? vBr2?
O1 D
求出
O
E
vBe2
L
cos
O1
vCD
cos
L
O1
cos2
L
vCD
l cos2
2L
3l
8L
()
vBr 2
vCD
sin
l
4
()
8
例题
例 题 10
§3 复合运动
3.加速度分析 (1)对动点A、动系e1
aA
aA
0
aAn
ae1
ar1
22
例题
*
例 题 11
§3 复合运动
A
ω4 O
ω1
Ⅲ Ⅱ Ⅳ Ⅰ
ω1
ω423例题*例 题 11§3 复合运动
解:把动系固连于系杆OA上,则牵连角速度ωe就是待求
的角速度ω4 (设为),即ωe = ω4 ( )。
ω 3r= ω4
Ⅲ
已 知 齿 轮 Ⅰ 的 绝 对 角 速 度 ω1 () ,故如能求出它对于动系的
R A
Ш
E
h 60º
O1
图示机构,已知系杆OA=3R,AE=1.5R,系杆OA
的角速度ω0=常数,试求图示位置曲柄O1B的角速 度和角加速度。
29
例题
例 题 13(习题3.29)
§3 复合运动
解: 1.运动分析: 杆OA、O1B 定轴转动,
轮Ⅰ不动,
动系e1
r3
r2
R
R
r1 O
ІІ
A
Ш
轮Ⅱ,Ⅲ和套筒E一般平面运动。
根据轮与杆的接触特点选择适当的动点动系
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4
上海电力学院
工程力学习题册
14.1
例8 图示半径为r的半圆形凸轮在水平面上滑 8.3 动,使直杆OA可绕轴O转动。OA=r,在图示瞬时 杆OA与铅垂线夹角 30,杆端A与凸轮相接触, 牵 1在同一铅直线上,凸轮的的速度为 v ,加 连 点O与 O 运 速度为 a 。求在图示瞬时A点的速度和加速度。并 动 O 为 求OA杆的角速度和角加速度。 平 解:以杆端A为动点,定系 va 动 取在地面上,动系取在凸轮上, v 时 v r A ve a 点 动点的速度合成矢量图如图。 r 的 建立如图的投影坐标轴 A , 加 O1 速 由va ve vr,将各矢量投影到投 度 影轴上,得 合
AB
ve v 3 e (rad s) AC 2 R 3
A
动点的加速度合成矢量图如图所示。 8.4 其中 a n R 2 8 3(cm s 2 ) a 牵
连 4 3 n 2 2 2 ae AC AB 2 R AB (cm s ) 运 3 动 16 aen ar 2 ac 2 AB vr 3 (cm s ) n 为 ae aa 3 转 R C O 建立如图的投影轴,由 动 B ac n n 时 aa aa ae ae ar ac 点 的 将各矢量投影到投影轴上得 加 n n 速 aa cos ae cos ae sin ac 度 1 n 合 所以 ae (ac aen sin aa cos ) 4.52(cm s 2 ) cos 成 定 ae ae 0.65(rad s 2 ) 转向为逆时针方向。 理 故 AB
故OA杆的角加速度
OA
a 3 v2 a (a ) OA 3r r
1
上海电力学院
工程力学习题册
14.2 图示机构中 AB=CD=EF=l,设在图示位置时 45 ,杆 EF 的角速度为 ,角加速度为 0,求此 时杆 AB 的角速度与角加速度。
F
E
B
D
A
C
以滑块 F 为动点,动系固结于 BD 杆上,定系固结于地面,牵连运动为平动。动点的速度矢量合成图如图(a) 所示,则有
成 定 理
va cos ve vr cos va sin vr sin
8.3
牵 连 运 动 为 平 动 时 点 的 加 速 度 合 成 定 理
ve v v 3 v 2 cos 2 cos 30 3 3 OA杆的角速度为 va 3 v OA OA 3r
ve va
而 ve lAB , va l ,所以 。 AB (顺时针转向) 动点的加速度矢量合成图如图(b)所示。其中 aa l , ae lAB l , ae l AB
2 n 2 2 t
将 aa ar ae ae 向水平方向投影得
t n
例13 圆盘的半径 R 2 3cm , A 以匀角速度 2 rad s,绕O轴转 动,并带动杆AB绕A轴转动,如 图。求机构运动到A、C两点位于 v a vr 同一铅垂线上,且 30 时,AB ve 杆转动的角速度与角加速度。 O R C B 解:取圆盘中心C为动点,定系 取在地面上,动系取在AB杆上。动 点的速度合成矢量图如图所示。 由图可得 ve va tan R tan 30 4 cm s vr va cos R cos 30 8 cm s 所以杆AB的角速度为
2 OA
v v v2 arn r 3r r 3r
2
2
n aa a a ar v A ae a arn
O
所以
1 3 v2 n n aa (ae 2ar aa ) (a ) 3 r 3
8.3
牵 连 运 动 为 平 动 时 点 的 加 速 度 合 成 定 理
解得: va vr
动点的加速度合成矢量图如图。 其中
a r
n a
r 建立如图的投影轴,由 O1 n n aa aa ae ar ar 将各矢量投影到投影轴上,得
n aa cos 30 aa cos 60 ae cos 60 arn
1 L 2
e vB 3L e r r v B cos L , v B vB vB vB , v B 钟向)
[6 分]
c r e aB 0 , 2 v B 3L 2 , a B 0
a B L12 L 2
n t aa sin 45 ae cos 45 ae sin 45
AB 22 (顺时针转向)
vr va
F
ar
a
t e
F
B D
ve
E
a
B
n e
D
aa
E
A
C
(a)
A
C
(b)
2
上海电力学院
工程力学习题册
14.3
8.4
牵 连 运 动 为 转 动 时 点 的 加 速 度 合 成 定 理
AC
2R
3
上海电力学院
工程力学习题册
14.4 图示平面机构中,杆 O1A 绕 O1 轴转动,设 O2B = L,在图示 = 30°位置时,杆 O1A 的角速度为, 角加速度为零。试求该瞬时杆 O2B 转动的角速度与角加速度。
解:以铰链为动点,杆 O1A 为动系。有
e vB O1 B L sin
[10 分]
由
e e r c a B a B a B a B a B a B
c x: a B sin a B cos a B
得
c a B 2a B 3a B 3L 2
1
aB 3 2 O2 B
(逆钟向)
[15 分]