FANUC_M-10iA_R-30iA_Mate_机器人基本操作手册
FANUC机器人操作规程完整
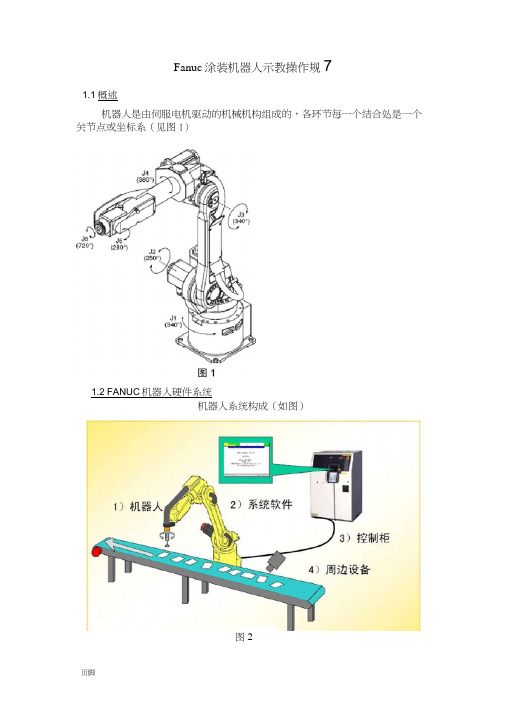
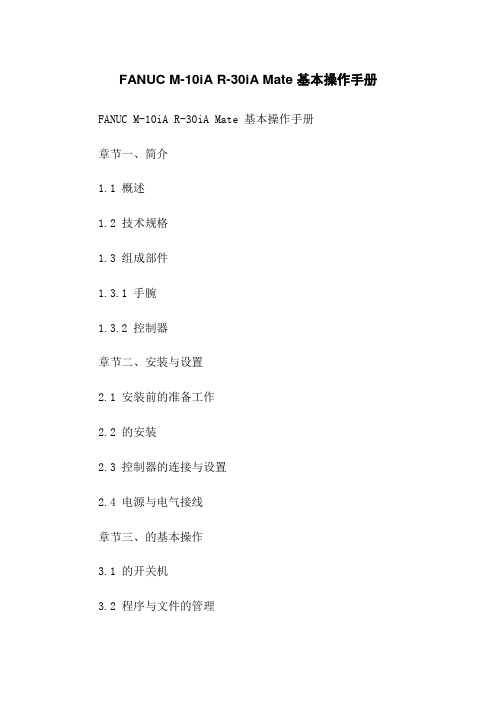
Fanuc涂装机器人示教操作规71.1概述机器人是由伺服电机驱动的机械机构组成的,各环节每一个结合处是一个关节点或坐标系(见图1)1.2 FANUC机器人硬件系统机器人系统构成(如图)图21.3示教盒TP1.3.1认识TP 上的键(见图4)Pre :显示上一屏 幕 F4F5Reset:复位键 SHIFT :与其他 键一起执行。
DISP :分屏显示数字键| STEP:单 | |步运行 |F2MENU:菜单Select :程序选择界面 Edit 、:程序编辑界面 DATA:参数设置畀面 FCTN:功能键机器人动作键 正向运行 程序键 反向运行 程序键 坐标系切 换键1. 3. 2 TP 上的开关(表1) TP 开关此开关控制TP 有效/无效,当TP 无效时,示教、编程、手动运行不能 被使用。
DEADMAN 开关当TP 有效时,只有DEADMAN 开关被按下,机器人才能运动,一旦松开, 机器人立即停止运动。
急停按钮此按钮被按下,机器人立即停止运动。
1.3.3 TP 的显示屏功能键菜单正在被编辑 的程序 一-当前行号 I当前再教坐标系厂SAMPLE 1 LZNC 11HID ‘FADSEDp行号程序结束 标志提示消息3B L * 4 s L. Sv J [End]P(l]WU1PE11PI4] PCL1PAUSEDXOQW nwr 70% CBIT501000e»/*£n C1TT3050*0xm./sec F36TK lftOHFXME •of pre«B ENTKR(CHO前进『后退无i运行状态示敎速度SAHPLK1JOINT 39K正在被执行 的程序 ]POSITION安全操作规程1.4示教和手动机器人1)请不要带者手套操作示教盘和操作盘。
2)在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。
3)在按下示教盘上的点动键之前要考虑到机器人的运动趋势。
4)要预先考虑好避让机器人的运动轨迹,并确认该线路不受干涉。
FANUC M-10iA R-30iA Mate 机器人基本操作手册
FANUC M-10iA R-30iA Mate 基本操作手册FANUC M-10iA R-30iA Mate 基本操作手册章节一、简介1.1 概述1.2 技术规格1.3 组成部件1.3.1 手腕1.3.2 控制器章节二、安装与设置2.1 安装前的准备工作2.2 的安装2.3 控制器的连接与设置2.4 电源与电气接线章节三、的基本操作3.1 的开关机3.2 程序与文件的管理3.3 示教模式的使用3.4 示教与回放操作3.5 基本运动指令的使用3.6 运动示教与编辑3.7 IO 接口的操作3.8报警与故障处理章节四、高级操作4.1 自动化生产流程的编程4.2 程序编辑与调试4.3 取样运动的优化4.4 传感器的应用与配置4.5 外部设备的控制章节五、维护与保养5.1 日常维护与保养5.2 的安全操作5.3 常见故障与排除方法5.4 部件更换与维修章节六、附件附件一、FANUC M-10iA R-30iA Mate 的技术规格表附件二、操作快速参考手册注:本文档所涉及的法律名词及注释:1、:根据《法》的定义,是一种用于代替人类工作的自动化设备,具备感知、决策和执行能力。
2、示教:通过手动操作,把的动作输入到控制器,用于记录运动轨迹、保存程序等。
3、回放:将之前示教好的动作再次执行,实现自动化操作。
本文档涉及附件:1、附件一、FANUC M-10iA R-30iA Mate 的技术规格表,详细描述了的参数、性能等信息。
2、附件二、操作快速参考手册,提供了的基本操作指南,方便用户快速了解和使用。
FANUC_RobotR-30iA_控制装置HandingTool操作说明书.pdf

有关操作机器人时的详细功能,请用户通过说明书充分理解其规格。
如果说明书与本资料存在差异,应以本资料为准。 目录
前言
-------------------------------------------------------------------------------------------------------------------------------------- s-1
“操作者”不能在安全栅栏内进行作业。 “编程人员”、“维护技术人员”可以在安全栅栏内进行作业。 安全栅栏内的作业,包括搬运、设置、示教、调整、维护等。 要在安全栅栏内进行作业,必须接受过机器人的专业培训。
在进行机器人的操作、编程、维护时,操作者、编程人员、维护技术人员必须注意安全,至少应穿戴下列物品进行作业。
我公司备有各类培训课程。详情请向我公司的营业部门查询。 (2) 在设备运转之中,即使机器人看上去已经停止,也有可能是因为机器人在等待启动信号而处在即将动作的状态。即
使在这样的状态下,也应该视为机器人处在操作状态。为了确保作业人员的安全,应当能够以警报灯等的显示或者 响声等来切实告知(作业人员)机器人处在操作之中。 (3) 务须在系统的周围设置安全栅栏和安全门,使得如果不打开安全门,作业人员就不能够进入安全栅栏内。安全门上 应设置互锁开关、安全插销等,以使作业人员打开安全门时,机器人就会停下。
操作者
进行如下的作业。
• 接通/断开系统的电源
• 起动或停止程序
• 系统报警状态的恢复
操作者不得在安全栅栏内进行作业。
编程人员/示教人员
除了操作者的作业外,
• 还进行机器人的示教、外围设备的调试等安全栅栏内的作业。
上述人员必须接受针对机器人的专业培训。
FANUC机器人操作规程

Fanuc涂装机器人示教操作规程1.1概述机器人是由伺服电机驱动的机械机构组成的,各环节每一个结合处是一个关节点或坐标系(见图1)图11.2FANUC机器人硬件系统机器人系统构成(如图)1.3示教盒TP1.3.1认识TP 上的键(见图4)速度加减键正向运行程序键 机器人动作键 MENU:菜单Select :程序选择界面 Edit 、:程序编辑界DATA 参数设置界面 FCTN:功能键DISP :分 屏显示 Reset :复位键SHIFT:与其他键一起执行。
反向运行程序键 坐标系切换键 Pre :显示上一屏幕 ISTEP:单步运行 数字键1.3.2TP上的开关(表1)TP开关此开关控制TP有效/无效,当TP无效时,示教、编程、手动运行不能被使用。
DEADMAN开关当TP有效时,只有DEADMAN开关被按下,机器人才能运动,一旦松开,机器人立即停止运动。
急停按钮此按钮被按下,机器人立即停止运动。
1.3.3TP的显示屏正在被执行的程序1.3.2TP 上的开关io OK rim10%CMT50 5D0m7占也。
LM*ritow前进J 后退运行状态示教速度行号提示消息程序结束标志正在被编的程序安全操作规程1.4示教和手动机器人1)请不要带者手套操作示教盘和操作盘。
2)在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。
3)在按下示教盘上的点动键之前要考虑到机器人的运动趋势。
4)要预先考虑好避让机器人的运动轨迹,并确认该线路不受干涉。
5)机器人周围区域必须清洁、无油,水及杂质等。
1.5生产运行1)在开机运行前,须知道机器人根据所编程序将要执行的全部任务。
2)须知道所有会左右机器人移动的开关、传感器和控制信号的位置和状态。
3)必须知道机器人控制器和外围控制设备上的紧急停止按钮的位置,准备在紧急情况下按这些按钮。
4)永远不要认为机器人没有移动其程序就已经完成。
因为这时机器人很有可能是在等待让它继续移动的输入信号。
FANUC机器人操作规程完整

Fanuc涂装机器人示教操作规程1.1 概述机器人是由伺服电机驱动的机械机构组成的,各环节每一个结合处是一个关节点或坐标系(见图1)图11.2 FANUC机器人硬件系统机器人系统构成(如图)1.3示教盒TP1.3.1 认识TP 上的键(见图4)图4Pre :显示上一屏幕DISP :分屏显示 STEP:单步运行 Reset :复位键 数字键MENU:菜单Select :程序选择界面 Edit 、:程序编辑界面 DATA:参数设置界面 FCTN:功能键机器人动作键 正向运行程序键 反向运行程序键 坐标系切换键 速度加减键1.3.2 TP上的开关1.3.3 TP的显示屏. 安全操作规程1.4 示教和手动机器人1) 请不要带者手套操作示教盘和操作盘。
2) 在点动操作机器人时要采用较低的倍率速度以增加对机器人的控制机会。
3) 在按下示教盘上的点动键之前要考虑到机器人的运动趋势。
4) 要预先考虑好避让机器人的运动轨迹,并确认该线路不受干涉。
5) 机器人周围区域必须清洁、无油,水及杂质等。
1.5 生产运行1)在开机运行前,须知道机器人根据所编程序将要执行的全部任务。
2)须知道所有会左右机器人移动的开关、传感器和控制信号的位置和状态。
3)必须知道机器人控制器和外围控制设备上的紧急停止按钮的位置,准备在紧急情况下按这些按钮。
4)永远不要认为机器人没有移动其程序就已经完成。
因为这时机器人很有可能是在等待让它继续移动的输入信号。
1.6操作机器人1.6.1 通电和关电1.通电1)接通电源前,检查工作区域包括机器人、控制器等。
检查所有的安全设备是否正常。
2)将操作者面板上的断路器置于ON2.关电1)关闭电源前,确保机器人处于静止状态2)将操作者面板上的断路器置于OFF注意:如果有外部设备诸如打印机、软盘驱动器、视觉系统等和机器人相连,在关电前,要首先将这些外部设备关掉,以免损坏。
1.6.2手动示教机器人1.示教模式(见表1,图1)图1设置示教模式,按TP上的COORD键进行选择。
FANUC 机器人培训手册(常用)

2.FANUC 机器人的构成--------------------------------------------------------------------------------- 2
R-30i操作说明书-02
s-6
B-82694CM
3.4
编程时的注意事项
为了安全使用
警告 编程时应尽可能在安全栅栏的外边进行。因不得已情形而需要在安全栅 栏内进行时,应注意下列事项。 - 仔细察看安全栅栏内的情况,确认没有危险后再进入栅栏内部。 - 要做到随时都可以按下急停按钮。 - 应以低速运行机器人。 - 应在确认清整个系统的状态后进行作业,以避免由于针对外围设备
警告 在拆卸电机和制动器时,应采取以起重机等来吊运等措施后再拆除,以 避免机臂等落下来。
警告 进行维修作业时,因迫不得已而需要移动机器人时,应注意如下事项。 - 务须确保逃生退路。并且,应在把握整个系统的操作情况后再进行
作业,以避免由于机器人和外围设备而堵塞逃生退路。 - 时刻注意周围是否存在危险,作好准备,以便在需要的时候可以随
< > series
R-30*A 控制装置 DeviceNet 操作说明书
B-82694CM/01
在使用机器人之前,务须仔细阅读“FANUC Robot 安全手册(B-80687CM)”,并在理解该内容的基础上使用 机器人。
- 本说明书的任何内容不得以任何方式复制。 - 所有参数指标和设计可随时修改,恕不另行通知。
防防護护柵栅栏
パネ配ル电ボ盘ード
EAS1 EAS11 EAS2 EAS21
((注注)释 Eト)A板SEの1,AE端ASS子11、台1,E上EAAにSS2出1,1Eさ、AれSE2て1AはいS2操ま、作すE。パAネS2ル1上配の置プ在リン操 詳細作は面R-板J3上iC的制御印部刷保电守路説板明的書を端ご子参台照上下。さい。 详情请参阅 R-30iA 控制装置维修说明 书。
FANUC机器人R-30iA Mate控制器维修手册

< > !R-30+A Mate }维 修 说 明 书B-82725CM/05在使用机器人之前,务须仔细阅读“FANUC Robot安全手册(FANUC Robot Safety Manual : B-80687EN)”,并在理解该内容的基础上使用机器人。
·本说明书的任何内容不得以任何方式复制。
·所有参数指标和设计可随时修改,恕不另行通知。
本说明书中所载的产品,受到日本国《外汇和外国贸易法》的限制。
从日本将这些出口到其他国家时,必须获得日本国政府的出口许可。
另外,将该产品再出口到其他国家时,应获得再出口该产品的国家的政府许可。
此外,该产品可能还受到美国政府的再出口法的限制。
若要出口或者再出口此类产品,请向FANUC公司洽询。
本说明书中记载的商品是在严格的质量管理下制造的,在应用到因本商品的故障而预测会导致重大事故或者损失的设备上时,请设置安全装置。
我们试图在本说明书中描述尽可能多的情况。
然而,对于那些不必做的和不可能做的情况,由于存在各种可能性,我们没有描述。
因此,对于那些在说明书中没有特别描述的情况,可以视为“不可能”的情况。
B-82725CM/05为安全使用为安全使用感谢贵公司此次购买FANUC(发那科)机器人。
本说明资料说明为安全使用机器人而需要遵守的内容。
在使用机器人之前,务须熟读并理解本资料中所载的内容。
有关操作机器人时的详细功能,请用户通过说明书充分理解其规格。
如果说明书与本资料存在差异,应以本资料为准。
目录前言--------------------------------------------------------------------------------------------------------------------------------------s-11 警告、注意和注释----------------------------------------------------------------------------------------------------------------------------s-12 连接至急停电路-------------------------------------------------------------------------------------------------------------------------------s-23 维修说明书中的警告事项-------------------------------------------------------------------------------------------------------------------s-2前言机器人不能单个进行作业,只有安装上机械手,构架起外围设备和系统才可进行作业。