51单片机课程设计 AD转换
51单片机的AD转换程序
#include "reg51.h"#include "intrins.h"#define FOSC 18432000L#define BAUD 9600typedef unsigned char BYTE; //定义了一个unsigned char的同义词BYTE typedef unsigned int WORD; //定义了一个unsigned int 的同义词WORD /*Declare SFR associated with the ADC */sfr ADC_CONTR = 0xBC; //AD转化控制寄存器,地址是0xBCsfr ADC_RES = 0xBD; //8位AD转换结果寄存器sfr ADC_LOW2 = 0xBE; //AD转化低2位结果寄存器sfr P1ASF = 0x9D; //P1口中的相应位作为模拟功能使用时的控制寄存器/*Define ADC operation const for ADC_CONTR*/#define ADC_POWER 0x80 //ADC电源控制位#define ADC_FLAG 0x10 //ADC 完成标志#define ADC_START 0x08 //ADC 启动控制位//AD转换速度选择#define ADC_SPEEDLL 0x00 //540 clocks#define ADC_SPEEDL 0x20 //360 clocks#define ADC_SPEEDH 0x40 //180 clocks#define ADC_SPEEDHH 0x60 //90 clocksvoid InitUart();void SendData(BYTE dat);void Delay(WORD n);void InitADC();BYTE ch = 0; //ADC channel NO.void main(){InitUart(); //Init UART, use to show ADC resultInitADC(); //Init ADC sfrIE = 0xa0; //Enable ADC interrupt and Open master interrupt switch//Start A/D conversionwhile (1);}/*----------------------------ADC 中断处理----------------------------*/void adc_isr() interrupt 5 using 1{ADC_CONTR &= !ADC_FLAG; //清除ADC中断标志位SendData(ch); //Show Channel NO.SendData(ADC_RES); //Get ADC high 8-bit result and Send to UART//if you want show 10-bit result, uncomment next line// SendData(ADC_LOW2); //Show ADC low 2-bit resultif (++ch > 7) ch = 0; //切换到下一通道ADC_CONTR = ADC_POWER | ADC_SPEEDLL | ADC_START | ch;}/*----------------------------Initial ADC sfr----------------------------*/void InitADC( ){P1ASF = 0xff; //设置P1口全部为ADC通道ADC_RES = 0; //清除高8位缓冲数据ADC_CONTR = ADC_POWER | ADC_SPEEDLL | ADC_START | ch;Delay(2); //打开ADC}/*----------------------------Initial UART----------------------------*/void InitUart(){SCON = 0x5a; //8 bit data ,no parity bitTMOD = 0x20; //工作方式寄存器,8位初值自动重新装入定时器TH1 = TL1 = -(FOSC/12/32/BAUD); //Set Uart baudrateTR1 = 1; //T1开始运行}/*----------------------------Send one byte data to PCInput: dat (UART data)Output:-----------------------------*/void SendData(BYTE dat){while (!TI); //WaitTI = 0; //ClearSBUF = dat; //Send}/*----------------------------Software delay function----------------------------*/void Delay(WORD n){WORD x;while (n--){x = 5000;while (x--); } }。
基于51单片机的AD和DA

基于51单片机的AD和DA本讲内容:介绍AD/DA芯片PCF8591,通过例程讲解AD和DA过程。
AD和DA的概念:AD转换的功能是把模拟量电压转换为数字量电压。
DA转换的功能正好相反,就是讲数字量转换位模拟量。
分辨率的概念:一位数字量所表示的电压值。
对于5V的满量程,采用8位的DAC 时,分辨率为5V/256=19.5mV。
PCF8591简介:PCF8591是单片、单电源低功耗8位CMOS数据采集器件,具有4个模拟输入、一个模拟输出和一个串行IIC总线接口。
3个地址引脚A0、A1和A2用于编程硬件地址,允许将最多8个器件连接至IIC总线而不需要额外硬件。
PCF8591管脚图:PCF8591接口电路图:PCF8591的控制寄存器:例程:AD程序/**********************AD转换**********************单片机型号:STC89C52RC*开发环境:KEIL*功能:IIC协议 PCF8591 AD转换**************************************************/#include<reg52.h>#include <intrins.h>#define LCD_Data P0#define Busy 0x80#define uchar unsigned char#define delay0;_nop_();#define AddWr 0x90#define AddRd 0x91sbit RST=P2^4;sbit Sda=P2^0;sbit Scl=P2^1;sbit LCD_RS=P1^0;sbit LCD_RW=P1^1;sbit LCD_E =P2^5;bit ADFlag;uchar code table0[]={" SL-51A "};uchar code table1[]={" AD CONVERT "};uchar code table2[]={"CH1: . V"};uchar code table3[]={"CH2: . V"};uchar code table4[]={"CH3: . V"};uchar code table5[]={"CH4: . V"};uchar TempData[8];void Delay5Ms(void);void delay(int In,int Out); void WriteDataLCD(unsigned char WDLCD);void WriteCommandLCD(unsigned char WCLCD,BuysC);uchar ReadDataLCD(void);uchar ReadStatusLCD(void);void LCDInit(void);void DisplayOneChar(unsigned char X,unsigned char Y,unsigned char DData);void DisplayListChar(unsigned char X,unsigned char Y,unsigned char code *DData);void Init_Timer1(void);void Start(void);void Stop(void);void Ack(void);void NoAck(void);void Send(unsigned char Data);uchar Read(void);void DAC(unsigned char Data);uchar ReadADC(unsigned char Chl);void info_disp(void);/**********5ms延时函数***************************/void Delay5Ms(void){unsigned int TempCyc=3552;while(TempCyc--);}/********************延迟函数********************/void delay(int In,int Out) {int i,j;for(i=0;i<In;i++){for(j=0;j<Out;j++){;}}}/*------------------------------------------------初始化定时器1------------------------------------------------*/void Init_Timer1(void){TMOD|=0x10;TH1=0xff;TL1=0x00;EA=1;ET1=1;TR1=1;}/*------------------------------------------------启动IIC总线------------------------------------------------*/void Start(void){Sda=1;delay0;Scl=1;delay0;Sda=0;delay0;Scl=0;}/*------------------------------------------------停止IIC总线------------------------------------------------*/void Stop(void){Sda=0;delay0;Scl=1;delay0;Sda=1;delay0;Scl=0;}/*------------------------------------------------应答IIC总线------------------------------------------------*/void Ack(void){Sda=0;delay0;Scl=1;delay0;Scl=0;delay0;}/*------------------------------------------------非应答IIC总线------------------------------------------------*/void NoAck(void){Sda=1;delay0;Scl=1;delay0;Scl=0;delay0;}/*------------------------------------------------发送一个字节------------------------------------------------*/ void Send(unsigned char Data){uchar BitCounter=8;uchar temp;do{temp=Data;Scl=0;delay0;if((temp&0x80)==0x80){Sda=1;}else{Sda=0;}Scl=1;temp=Data<<1;Data=temp;BitCounter--;}while(BitCounter);Scl=0;}/*------------------------------------------------读入一个字节并返回------------------------------------------------*/ uchar Read(void){uchar temp=0;uchar temp1=0;uchar BitCounter=8;Sda=1;do{Scl=0;delay0;Scl=1;delay0;if(Sda){temp=temp|0x01;}else{temp=temp&0xfe;}if(BitCounter-1){temp1=temp<<1;temp=temp1;}BitCounter--;}while(BitCounter);return(temp);}/*------------------------------------------------写入DA数模转换值------------------------------------------------*/ void DAC(unsigned char Data){Start();Send(AddWr);Ack();Send(0x40);Ack();Send(Data);Ack();Stop();}/*------------------------------------------------读取AD模数转换的值,有返回值------------------------------------------------*/ uchar ReadADC(unsigned char Chl){uchar Data;Start();Send(AddWr);Ack();Send(0x40|Chl);Ack();Start();Send(AddRd);Ack();Data=Read();Scl=0;NoAck();Stop();return Data;}/*******************写数据函数*******************/ void WriteDataLCD(unsigned char WDLCD){ReadStatusLCD();LCD_Data=WDLCD;LCD_RS=1;LCD_RW=0;LCD_E=0;LCD_E=0;LCD_E=1;}/*******************写指令函数*******************/ void WriteCommandLCD(unsigned char WCLCD,BuysC) {if(BuysC)ReadStatusLCD();LCD_Data=WCLCD;LCD_RS=0;LCD_RW=0;LCD_E=0;LCD_E=0;LCD_E=1;}/*******************读数据函数*******************/unsigned char ReadDataLCD(void){LCD_RS=1;LCD_RW=1;LCD_E=0;LCD_E=0;LCD_E=1;return(LCD_Data);}/*******************读状态函数*******************/unsigned char ReadStatusLCD(void){LCD_Data=0xFF;LCD_RS=0;LCD_RW=1;LCD_E=0;LCD_E=0;LCD_E=1;while (LCD_Data&Busy);return(LCD_Data);}/********************LCD初始化*******************/void LCDInit(void){LCD_Data=0;WriteCommandLCD(0x38,0);Delay5Ms();WriteCommandLCD(0x38,0);Delay5Ms();WriteCommandLCD(0x38,0);Delay5Ms();WriteCommandLCD(0x38,1);WriteCommandLCD(0x08,1);WriteCommandLCD(0x01,1);WriteCommandLCD(0x06,1);WriteCommandLCD(0x0C,1);}/********************清屏函数********************/void LCD_Clear(void){WriteCommandLCD(0x01,1);Delay5Ms();}/**************按指定位置显示一个字符*************/void DisplayOneChar(unsigned char X,unsigned char Y,unsigned char DData) {Y&=0x1;X&=0xF;if(Y)X|=0x40;X|=0x80;WriteCommandLCD(X, 0);WriteDataLCD(DData);}/**************按指定位置显示一串字符*************/void DisplayListChar(unsigned char X,unsigned char Y,unsigned char code *DData) {unsigned char ListLength;ListLength=0;Y&=0x1;X&=0xF;while(DData[ListLength]>=0x20){if(X<=0xF){DisplayOneChar(X, Y, DData[ListLength]);ListLength++;X++;}}}/********************系统初始化*******************/void sys_init(void){LCDInit();delay(5,100);Init_Timer1();DisplayListChar(0,0,table0);DisplayListChar(0,1,table1);}/*------------------------------------------------显示------------------------------------------------*/void info_disp(void){DisplayListChar(0,0,table2);DisplayOneChar(4,0,(0x30+TempData[0]));DisplayOneChar(6,0,(0x30+TempData[1]));DisplayListChar(8,0,table3);DisplayOneChar(12,0,(0x30+TempData[2]));DisplayOneChar(14,0,(0x30+TempData[3]));DisplayListChar(0,1,table4);DisplayOneChar(4,1,(0x30+TempData[4]));DisplayOneChar(6,1,(0x30+TempData[5]));DisplayListChar(8,1,table5);DisplayOneChar(12,1,(0x30+TempData[6]));DisplayOneChar(14,1,(0x30+TempData[7]));}/*------------------------------------------------主程序------------------------------------------------*/void main(){uchar num;uchar ADtemp;sys_init();delay(100,1000);LCD_Clear();while(1){DAC(num);num++;delay(5,100);if(ADFlag){ADFlag=0;ADtemp=ReadADC(0);TempData[0]=(ReadADC(0))/50;TempData[1]=((ReadADC(0))%50)/10; ADtemp=ReadADC(1);TempData[2]=(ReadADC(1))/50;TempData[3]=((ReadADC(1))%50)/10; ADtemp=ReadADC(2);TempData[4]=(ReadADC(2))/50;TempData[5]=((ReadADC(2))%50)/10; ADtemp=ReadADC(3);TempData[6]=(ReadADC(3))/50;TempData[7]=((ReadADC(4))%50)/10; info_disp();}}}/*------------------------------------------------定时器中断程序------------------------------------------------*/void Timer1_isr(void) interrupt 3 using 1{static unsigned int j;TH1=0xfb;TL1=0x00;j++;if(j==200){j=0;ADFlag=1;}}DA程序/******************DA转换LED输出*******************单片机型号:STC89C52RC*开发环境:KEIL*功能:此程序通过IIC协议对DAAD芯片操作, 并输出模拟量,用LED亮度渐变指示***************************************************/#include<reg52.h>#include <intrins.h>#define delay0; _nop_();#define uchar unsigned char#define AddWr 0x90#define AddRd 0x91sbit RST=P2^4;sbit Sda=P2^0;sbit Scl=P2^1;sbit Fm=P2^3;sbit LE1=P2^6;sbit LE2=P2^7;bit ADFlag;uchar code Datatab[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; data uchar Display[8];/*------------------------------------------------延时程序------------------------------------------------*/void mDelay(uchar j){unsigned int i;for(;j>0;j--){for(i=0;i<125;i++){;}}}/*------------------------------------------------初始化定时器1------------------------------------------------*/void Init_Timer1(void){TMOD|=0x10;TH1=0xff;TL1=0x00;EA=1;ET1=1;TR1=1;}/*------------------------------------------------启动IIC总线------------------------------------------------*/void Start(void){Sda=1;delay0;Scl=1;delay0;Sda=0;delay0;Scl=0;}/*------------------------------------------------停止IIC总线------------------------------------------------*/ void Stop(void){Sda=0;delay0;Scl=1;delay0;Sda=1;delay0;Scl=0;}/*------------------------------------------------应答IIC总线------------------------------------------------*/ void Ack(void){Sda=0;delay0;Scl=1;delay0;Scl=0;delay0;}/*------------------------------------------------非应答IIC总线------------------------------------------------*/ void NoAck(void){Sda=1;delay0;Scl=1;delay0;Scl=0;delay0;}/*------------------------------------------------发送一个字节------------------------------------------------*/ void Send(uchar Data){uchar BitCounter=8;uchar buffer;do{buffer=Data;Scl=0;delay0;if((buffer&0x80)==0x80)Sda=1;else Sda=0;Scl=1;buffer=Data<<1;Data=buffer;BitCounter--;}while(BitCounter);Scl=0;}/*------------------------------------------------读入一个字节并返回------------------------------------------------*/ uchar Read(void){uchar buffer=0;uchar buffer1=0;uchar BitCounter=8;Sda=1;do{Scl=0;delay0;Scl=1;delay0;if(Sda)buffer=buffer|0x01;else buffer=buffer&0xfe;if(BitCounter-1){buffer1=buffer<<1;buffer=buffer1;}BitCounter--;}while(BitCounter);return(buffer);}/*------------------------------------------------写入DA数模转换值------------------------------------------------*/ void DAC(uchar Data){Start();Send(AddWr);Ack();Send(0x40);Ack();Send(Data);Ack();Stop();}/*------------------------------------------------读取AD模数转换的值,有返回值------------------------------------------------*/ uchar ReadADC(uchar Chl){uchar Data;Start();Send(AddWr);Ack();Send(0x40|Chl);Ack();Start();Send(AddRd);Ack();Data=Read();Scl=0;NoAck();Stop();return Data;}void fmg(void){Fm=1;}void cmg(void){LE1=1;P0=0x00;LE1=0;LE2=1;P0=0x00;LE2=0;RST=0;}/*------------------------------------------------主程序------------------------------------------------*/ void main(){uchar num;uchar ADbuffer;Init_Timer1();cmg();fmg();while(1){DAC(num);num++;mDelay(20);if(ADFlag){ADFlag=0;ADbuffer=ReadADC(0);Display[0]=Datatab[(ReadADC(0))/50]|0x80;Display[1]=Datatab[((ReadADC(0))%50)/10];ADbuffer=ReadADC(1);Display[2]=Datatab[((ReadADC(1))/50)]|0x80;Display[3]=Datatab[((ReadADC(1))%50)/10];ADbuffer=ReadADC(2);Display[4]=Datatab[((ReadADC(2))/50)]|0x80;Display[5]=Datatab[((ReadADC(2))%50)/10];ADbuffer=ReadADC(3);Display[6]=Datatab[((ReadADC(3))/50)]|0x80; Display[7]=Datatab[((ReadADC(3))%50)/10]; }}}。
实验六 ADC0809AD转换实验

实验六 ADC0809AD转换实验一、实验目的1、掌握ADC0809AD芯片的工作原理和使用方法。
2、掌握如何使用51单片机配合ADC0809AD芯片实现模拟量转换。
二、实验原理ADC0809AD是一种8位分辨率、并行输出、单通道,3MHz 工作速率的A/D转换器。
ADC 有两个输入电压端子,IN+和IN-,它们之间加入了一个内部参考电压源(RE),所以在输入模拟信号时常在IN+端连接信号输入,而IN-端接地。
当选用RE = +2.5 V时,IN+的输入范围约为0-VREF,在本实验中选用的是RE = +5 V,所以IN+的输入范围约为0-5V。
当外部触发信号TRIGGER开启后,ADC执行转换操作。
在转换时,电压采样保持时间通常为 100 ns,最长转换时间为 200 us,当转换结束时,ADC将数字输出置在低电平并发出一个中断请求(INTR)信号。
转换结果可以通过 8个输出线路(DB0-DB7)获得。
三、实验器材2、*1 9针座(1x9 Pin Socket)。
3、*1 51单片机学习板。
4、*1 电阻10KΩ。
5、*1 电压源。
6、*1 面包板。
7、*5 条杜邦线。
四、实验步骤1、根据下表将ADC0809AD芯片插入到面包板中。
ADC0809AD引脚码ADC0809AD引脚名称功能1 A0- A/D输入(低、多路)引脚17 AGND 模拟地18 VREF/2 参考电压输出19 VCC 数字电源2、将9脚座插入面包板的横向边缘上。
3、使用杜邦线将ADC0809AD转换器连接到学习板上,并根据原理部分对芯片引脚进行接线。
4、将一个10KΩ的电阻连接到ADC0809AD芯片的IN+引脚和GND之间。
6、使用杜邦线将ADC0809AD芯片的DB0-DB7引脚连接到学习板的P0.0-P0.7引脚上。
7、将学习板的P0.0-P0.7引脚转为输出模式。
五、实验代码#include <reg52.h>// SFR位定义sfr ADC_CONTR = 0xBC; // ADC控制寄存器sfr ADC_RES = 0xBD; // ADC结果寄存器sfr ADC_RESL = 0xBE; // ADC结果低字节寄存器sfr P0 = 0x80; // P0口// 公用函数void delay(int time) // 延时函数{int i, j;for (i = 0; i < time; i++) {for (j = 0; j < 125; j++);}}while (1) {ADC_CONTR |= 0x08; // 开始转换while (!(ADC_CONTR & 0x10)); // 等待转换结束P0 = ADC_RES; // 将结果输出到P0口delay(1000); // 延时1000ms}}根据程序分析,程序采用了循环语句控制ADC的转换、输出,程序中实现的是ADC的一次转换。
51单片机ad转换代码及仿真

51单片机ad转换代码及仿真一、前言51单片机是一种广泛应用于嵌入式系统领域的微控制器,其具有低功耗、高性能、易学易用等特点。
其中,AD转换模块是其重要的功能之一,可以实现模拟信号到数字信号的转换。
本文将介绍51单片机AD 转换的相关知识和代码实现,并通过仿真验证其正确性。
二、51单片机AD转换原理1. AD转换概述AD转换(Analog-to-Digital Conversion)是指将模拟信号(如声音、图像等)转化为数字信号的过程。
在嵌入式系统中,AD转换通常用于采集外部传感器等模拟量信号,并将其转化为数字量进行处理。
2. 51单片机AD转换模块51单片机内置了一个8位AD转换模块,可以对0~5V范围内的模拟信号进行采样和转换。
该模块包含以下主要部分:(1)输入端:可接受外部0~5V范围内的模拟信号。
(2)采样保持电路:在采样期间对输入信号进行保持,以避免采样过程中信号波动。
(3)比较器:将输入信号与参考电压进行比较,并输出比较结果。
(4)计数器:对比较结果进行计数,得到AD转换的结果。
(5)控制逻辑:控制采样、保持、比较和计数等过程。
3. AD转换精度AD转换精度是指数字信号与模拟信号之间的误差,通常用位数来表示。
例如,8位AD转换器可以将模拟信号分成256个等级,即精度为1/256。
因此,AD转换精度越高,数字信号与模拟信号之间的误差越小。
4. AD转换速率AD转换速率是指单位时间内进行的AD转换次数。
在51单片机中,AD转换速率受到时钟频率和采样时间的限制。
因此,在实际应用中需要根据具体情况选择合适的时钟频率和采样时间以满足要求的转换速率。
三、51单片机AD转换代码实现以下为51单片机AD转换代码实现:```#include <reg52.h>sbit IN = P1^0; // 定义输入端口sbit OUT = P2^0; // 定义输出端口void main(){unsigned char result;while (1){ADC_CONTR = 0x90; // 打开ADCADC_CONTR |= 0x08; // 开始采样while (!(ADC_CONTR & 0x10)); // 等待采样完成result = ADC_RES; // 读取结果OUT = result; // 输出结果}}```代码解释:(1)定义输入输出端口:使用sbit关键字定义输入端口和输出端口。
单片机课程设计---AD转换系统设计
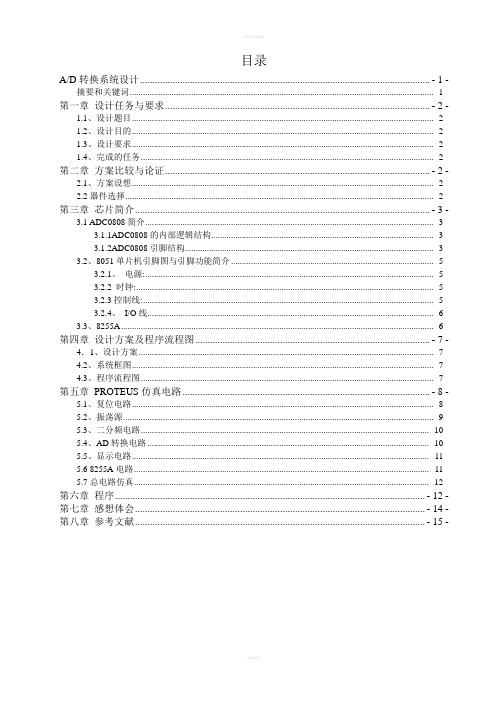
目录A/D转换系统设计.................................................................................................................... - 1 -摘要和关键词.......................................................................................................................................... - 1 - 第一章设计任务与要求.......................................................................................................... - 2 -1.1、设计题目......................................................................................................................................... - 2 -1.2、设计目的......................................................................................................................................... - 2 -1.3、设计要求......................................................................................................................................... - 2 -1.4、完成的任务..................................................................................................................................... - 2 - 第二章方案比较与论证.......................................................................................................... - 2 -2.1、方案设想......................................................................................................................................... - 2 -2.2器件选择............................................................................................................................................ - 2 - 第三章芯片简介...................................................................................................................... - 3 -3.1 ADC0808简介................................................................................................................................... - 3 -3.1.1ADC0808的内部逻辑结构..................................................................................................... - 3 -3.1.2ADC0808引脚结构................................................................................................................. - 3 -3.2、8051单片机引脚图与引脚功能简介 ............................................................................................ - 5 -3.2.1、电源: ................................................................................................................................... - 5 -3.2.2 时钟: ....................................................................................................................................... - 5 -3.2.3控制线: .................................................................................................................................... - 5 -3.2.4、I/O线.................................................................................................................................. - 6 -3.3、8255A .............................................................................................................................................. - 6 - 第四章设计方案及程序流程图.............................................................................................. - 7 -4.1、设计方案...................................................................................................................................... - 7 -4.2、系统框图......................................................................................................................................... - 7 -4.3、程序流程图..................................................................................................................................... - 7 - 第五章PROTEUS仿真电路................................................................................................... - 8 -5.1、复位电路......................................................................................................................................... - 8 -5.2、振荡源............................................................................................................................................. - 9 -5.3、二分频电路................................................................................................................................... - 10 -5.4、AD转换电路 ................................................................................................................................ - 10 -5.5、显示电路....................................................................................................................................... - 11 -5.6 8255A电路...................................................................................................................................... - 11 -5.7总电路仿真...................................................................................................................................... - 12 - 第六章程序............................................................................................................................ - 12 -第七章感想体会.................................................................................................................... - 14 -第八章参考文献.................................................................................................................... - 15 -A/D转换系统设计摘要和关键词A/D转换是指将模拟信号转换为数字信号,这在信号处理、信号传输等领域具有重要的意义。
51单片机ad转换程序解析
51单片机ad转换程序解析1.引言1.1 概述概述部分旨在介绍本篇文章的主题——51单片机AD转换程序,并对文章的结构和目的进行简要说明。
51单片机是指Intel公司推出的一种单片机芯片,它广泛应用于嵌入式系统中。
而AD转换则是模拟信号转换为数字信号的过程,是嵌入式系统中的重要功能之一。
本文将详细解析51单片机中的AD转换程序。
文章结构分为引言、正文和结论三个部分。
引言部分将给读者介绍本篇文章的内容和结构安排,正文部分将详细讲解51单片机AD转换程序的相关要点,而结论部分将总结正文中各个要点的内容,以便读者能够更好地理解和掌握51单片机AD转换程序的实现原理。
本文的目的在于向读者提供一份对51单片机AD转换程序的详细解析,使读者能够了解51单片机的AD转换功能以及如何在程序中进行相应的设置和操作。
通过本文的学习,读者将掌握如何使用51单片机进行模拟信号的采集和处理,为后续的嵌入式系统设计和开发提供基础。
在下一节中,我们将开始介绍文章的第一个要点,详细讲解51单片机AD转换程序中的相关知识和技巧。
敬请期待!1.2 文章结构文章结构部分主要是对整篇文章的框架和内容进行介绍和归纳,以帮助读者更好地理解文章的组织和内容安排。
本文以"51单片机AD转换程序解析"为主题,结构分为引言、正文和结论三个部分。
引言部分主要包括概述、文章结构和目的三个方面。
首先,通过对单片机AD转换程序的解析,来讲解其实现原理和功能。
其次,介绍文章的结构,帮助读者明确整篇文章的主要内容和组织方式。
再次,阐明文章的目的,即为读者提供关于51单片机AD转换程序的详尽解析和指导,帮助读者深入了解该技术并进行实际应用。
正文部分则分为两个要点,即第一个要点和第二个要点。
第一个要点可以从AD转换的基本概念入手,介绍51单片机AD转换的原理和流程。
包括输入电压的采样、AD转换器的工作原理、ADC的配置和控制等方面的内容。
在此基础上,深入解析51单片机AD转换程序的编写和调用方法,包括编程语言、寄存器的配置、数据的获取和处理等。
51单片机AD和DA转换汇编程序
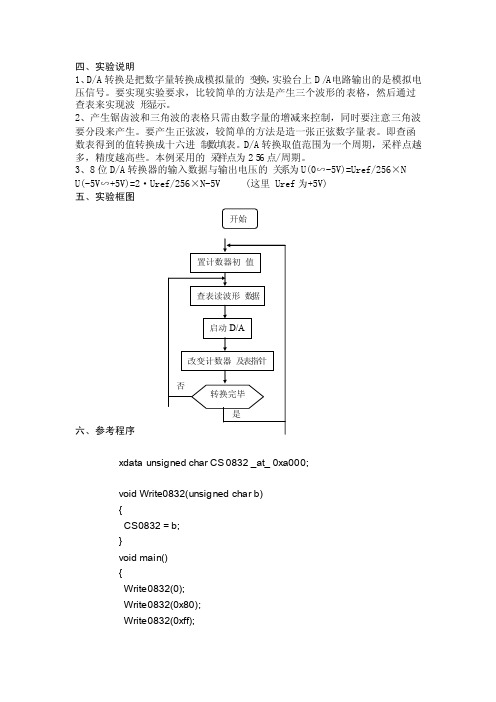
四、实验说明1、D/A 转换是把数字量转换成模拟量的变换,实验台上D /A 电路输出的是模拟电压信号。
要实现实验要求,比较简单的方法是产生三个波形的表格,然后通过查表来实现波形显示。
2、产生锯齿波和三角波的表格只需由数字量的增减来控制,同时要注意三角波要分段来产生。
要产生正弦波,较简单的方法是造一张正弦数字量表。
即查函数表得到的值转换成十六进制数填表。
D/A 转换取值范围为一个周期,采样点越多,精度越高些。
本例采用的采样点为256点/周期。
3、8位D/A 转换器的输入数据与输出电压的关系为U(0∽-5V)=Uref/256×N U(-5V ∽+5V)=2·Uref/256×N-5V (这里 Uref 为+5V)五、实验框图六、参考程序xdata unsig n ed char CS 0832 _at_ 0xa000;void Write 0832(unsig n ed char b){CS0832 = b;}void main(){Write 0832(0);Write 0832(0x80);Write 0832(0xff);开始否 是置计数器初值 查表读波形数据 启动D/A 改变计数器及表指针 转换完毕while(1);}/*========================================================== =*/CS0832 equ 0a000hmov dptr, #CS0832mov a, #00hmovx @dptr, amov a, #40hmovx @dptr, amov a, #80hmovx @dptr, amov a, #0c0hmovx @dptr, amov a, #0ffhmovx @dptr, aljmp $end硬件实验十三 A/D 模数转换实验一、实验要求利用实验板上的ADC 0809做A /D 转换器,实验板上的电位器提供模拟量输入,编制程序,将模拟量转换成二进制数字量,用8255的PA 口输出到发光二极管显示。
51单片机ad转换流程
51单片机ad转换流程51单片机是一种广泛应用于嵌入式系统中的微控制器。
与其他单片机相比,51单片机的特点之一是其模拟到数字转换功能(AD转换),它允许将模拟信号转换为数字量,以便进行数字信号处理和控制。
在本文中,我们将以“51单片机AD转换流程”为主题,详细介绍AD转换的步骤和相关概念。
第一步:了解AD转换的基本概念模拟到数字转换(AD转换)是电子系统中一种常见的操作。
它涉及将连续的模拟信号转换为离散的数字信号,以便进行数字信号处理。
AD转换的结果通常以二进制形式表示,可以被计算机或其他数字处理设备使用。
在AD转换过程中,最重要的参数是分辨率和采样率。
分辨率是指AD转换器能够分辨的最小信号变化量,通常以比特数表示。
例如,8位AD转换器的分辨率为2^8,即256个离散的信号水平。
采样率是指AD转换器每秒钟进行的样本数量,通常以赫兹(Hz)表示。
第二步:准备硬件连接在进行AD转换之前,需要连接电源、待转换的模拟信号源和51单片机上的AD输入引脚。
具体的硬件连接方式可以根据具体的应用需求和开发板设计进行调整。
通常情况下,待转换的模拟信号将通过电阻网络与AD输入引脚相连接。
这个电阻网络起到电压分压的作用,将输入信号的幅度限制在AD转换器可接受的范围内。
开发板上的AD输入引脚通常还具有可选的电容网络,用于去除输入信号中的高频噪声。
第三步:配置AD转换器参数在开始AD转换之前,需要通过编程设置51单片机上的AD转换器参数。
这些参数包括分辨率、输入通道选择、参考电压选择和采样率等。
这些参数的设置是通过对寄存器的操作来实现的。
通过写入相应的寄存器值,我们可以选择转换的分辨率。
51单片机上的AD转换器可以支持不同的分辨率,如8位、10位或12位。
选择转换的输入通道也是一个重要的步骤。
通常情况下,AD转换器具有多个输入信道,可以同时转换多个信号。
需要根据具体的信号源,选择合适的输入通道。
参考电压的选择也要根据具体的应用需求来确定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
课程设计报告华中师范大学武汉传媒学院传媒技术学院电子信息工程2011仅发布百度文库,版权所有.AD转换要求:A.使用单片机实现AD转换B.可以实现一位AD转换,并显示(保留4位数字)设计框图:方案设计:AD转换时单片机设计比较重要的实验。
模数转换芯片种类多,可以满足不同用途和不同精度功耗等。
外部模拟量选择的是简单的电位器,通过控制电位器来改变模拟电压。
显示电压值采用一般的四位七段数码管。
而AD转换芯片采用使用最广的ADC0809ADC0809芯片有28条引脚,采用双列直插式封装,如图所示。
下面说明各引脚功能:•IN0~IN7:8路模拟量输入端。
•2-1~2-8:8位数字量输出端。
•ADDA、ADDB、ADDC:3位地址输入线,用于选通8路模拟输入中的一路。
•ALE:地址锁存允许信号,输入端,高电平有效。
•START: A/D转换启动脉冲输入端,输入一个正脉冲(至少100ns宽)使其启动(脉冲上升沿使0809复位,下降沿启动A/D转换)。
•EOC: A/D转换结束信号,输出端,当A/D转换结束时,此端输出一个高电平(转换期间一直为低电平)。
•OE:数据输出允许信号,输入端,高电平有效。
当A/D转换结束时,此端输入一个高电平,才能打开输出三态门,输出数字量。
•CLK:时钟脉冲输入端。
要求时钟频率不高于640KHz。
•REF(+)、REF(-):基准电压。
•Vcc:电源,单一+5V。
•GND:地工作原理:首先输入3位地址,并使ALE=1,将地址存入地址锁存器中。
此地址经译码选通8路模拟输入之一到比较器。
START上升沿将逐次逼近寄存器复位。
下降沿启动A/D转换,之后EOC输出信号变低,指示转换正在进行。
直到A/D转换完成,EOC 变为高电平,指示A/D转换结束,结果数据已存入锁存器,这个信号可用作中断申请。
当OE输入高电平时,输出三态门打开,转换结果的数字量输出到数据总线上。
本次实验采用中断方式把表明转换完成的状态信号(EOC)作为中断请求信号,以中断方式进行数据传送。
不管使用上述哪种方式,只要一旦确定转换完成,即可通过指令进行数据传送。
首先送出口地址并以信号有效时,OE信号即有效,把转换数据送上数据总线,供单片机接受。
采用中断可以减轻单片机负担。
并可以使程序有更多的空间作二次开发。
硬件原理图:程序流程图:仿真图:制作实物图:AD转换模块:最小系统及显示:整体效果:调试最多的是数码管显示问题扫描太慢显示会太暗和有闪烁问题,通过不断改变延迟来调整达到最佳状态。
心得体会:通过这次的实验设计特别是前期的电路设计,和芯片选择以及后期的实物焊接。
对我们专业的电路认识了很多,学到了很多。
做一个东西要选择你要的芯片的,你必须要先了解一些大体的东西当你选择好后你更要全面了解它的性能。
对于单片机硬件来说要了解芯片,你要如何去驱动他来满足你的要求。
这对于编程和看懂芯片的时序有着高要求。
毕竟现在硬件更新换代太快,必须要学习怎么去设计去编写你要的程序来控制它。
这是我这次实验最深刻的理解。
这次实验也培养了我团队合作能力积极主动沟通,遇到问题一起解决。
对于现在的我们即将走出校门的人来说意义重大。
同时这次实验也大大拓宽了我的视野我还有很多东西要去理解去学习。
#include <reg51.h> // 引用标准库的头文件#include <intrins.h>#include <stdio.h>#define uchar unsigned char#define uint unsigned intuint temp=0;sbit ST=P3^6; //启动信号sbit EOC=P3^3; //转换结束信号,连到外部中断1口,转换结束后进入外部中断sbit OE=P3^7; //输出使能//sbit ls=P2^7;sbit dig_hc595_sh_dr=P1^7; //数码管的74HC595程序sbit dig_hc595_st_dr=P1^6;sbit dig_hc595_ds_dr=P1^5;void initial_myself();void initial_peripheral();void delay_short(unsigned int uiDelayShort);void delay_long(unsigned int uiDelayLong);//void display_service();void display_drive();void dis_service(int temp);//unsigned char ucDigShow8; //第8位数码管要显示的内容//unsigned char ucDigShow7; //第7位数码管要显示的内容//unsigned char ucDigShow6; //第6位数码管要显示的内容//unsigned char ucDigShow5; //第5位数码管要显示的内容unsigned char ucDigShow4; //第4位数码管要显示的内容unsigned char ucDigShow3; //第3位数码管要显示的内容unsigned char ucDigShow2; //第2位数码管要显示的内容unsigned char ucDigShow1; //第1位数码管要显示的内容unsigned char code dig_table[17]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};//0、1、2、3、4、5、6、7、8、9、A、b、C、d、E、F的显示码unsigned char ucDigShowTemp=0; //临时中间变量unsigned char ucDisplayDriveStep=1; //动态扫描数码管的步骤变量void dig_hc595_drive(unsigned char ucLedStatusTemp16_09,unsigned char ucLedStatusTemp08_01);main(){initial_myself();//初始化单片机delay_long(100);initial_peripheral(); //初始化外围while(1){P0=0xff;ST=0;ST=1;ST=0;// 启动A/D转换while(EOC==0);OE=1;//EA=0;//temp=0xff;dis_service(temp);//EA=0;display_drive();//显示电压值//delay_long(1);//EA=1;OE=0;}}void dis_service(int temp){int Tp=0;Tp=temp*1.0/255*500;ucDigShow1 = dig_table[Tp / 1000];ucDigShow2 = dig_table[Tp % 1000 / 100] | 0x80;ucDigShow3 = dig_table[Tp % 100 / 10] ;ucDigShow4 = dig_table[Tp % 10 / 1];}void display_drive()//显示电压值{uchar i=1;for(i=1;i<5;i++){ switch(i){case 1: //显示第1位ucDigShowTemp=ucDigShow1;dig_hc595_drive(ucDigShowTemp,0xfe);break;case 2: //显示第2位ucDigShowTemp=ucDigShow2;dig_hc595_drive(ucDigShowTemp ,0xfd);break;case 3: //显示第3位ucDigShowTemp=ucDigShow3;dig_hc595_drive(ucDigShowTemp,0xfb);break;case 4: //显示第4位ucDigShowTemp=ucDigShow4;dig_hc595_drive(ucDigShowTemp,0xf7);break;/*case 5: //显示第5位ucDigShowTemp=ucDigShow5;dig_hc595_drive(ucDigShowTemp,0xef);break;case 6: //显示第6位ucDigShowTemp=ucDigShow6;dig_hc595_drive(ucDigShowTemp,0xdf);break;case 7: //显示第7位ucDigShowTemp=ucDigShow7;dig_hc595_drive(ucDigShowTemp,0xbf);break;case 8: //显示第8位ucDigShowTemp=ucDigShow8;dig_hc595_drive(ucDigShowTemp,0x7f);break; */}}}//数码管的74HC595驱动函数void dig_hc595_drive(unsigned char ucDigStatusTemp16_09,unsigned char ucDigStatusTemp08_01){unsigned char i;unsigned char ucTempData;dig_hc595_sh_dr=0;dig_hc595_st_dr=0;ucTempData=ucDigStatusTemp16_09; //先送高8位for(i=0;i<8;i++){if(ucTempData>=0x80)dig_hc595_ds_dr=1;else dig_hc595_ds_dr=0;dig_hc595_sh_dr=0; //SH引脚的上升沿把数据送入寄存器delay_short(1);dig_hc595_sh_dr=1;delay_short(1);ucTempData=ucTempData<<1;}ucTempData=ucDigStatusTemp08_01; //再先送低8位for(i=0;i<8;i++){if(ucTempData>=0x80)dig_hc595_ds_dr=1;else dig_hc595_ds_dr=0;dig_hc595_sh_dr=0; //SH引脚的上升沿把数据送入寄存器delay_short(1);dig_hc595_sh_dr=1;delay_short(1);ucTempData=ucTempData<<1;}dig_hc595_st_dr=0; //ST引脚把两个寄存器的数据更新输出到74HC595的输出引脚上并且锁存起来delay_short(1);dig_hc595_st_dr=1;delay_short(1);dig_hc595_sh_dr=0; //拉低,抗干扰就增强dig_hc595_st_dr=0;dig_hc595_ds_dr=0;}void delay_short(unsigned int uiDelayShort){unsigned int i;for(i=0;i<uiDelayShort;i++){;}}void delay_long(unsigned int uiDelayLong){unsigned int i;unsigned int j;for(i=0;i<uiDelayLong;i++){for(j=0;j<500;j++){;}}}void initial_myself(){P0=0xff;P1=0xff;P2=0xff;P3=0xff;TMOD=0x02;//T1工作模式2TH0=0x14;TL0=0x00;}void initial_peripheral() //初始化外围{IE=0x82; //IE.7位为1表示CPU开放中断,IE.1位也为1,表示允许定时器T0溢出中断TR0=1; //使能定时器P0=0xff; //选择ADC0809的通道7(111)(P1.0~P1.2)//ls=0;ST=0;OE=0;IT1=1; //下降沿触发EX1=1; //使能外部中断1EA=1; //允许全局中断}void counter1(void) interrupt 2 using 2{EX1=0;temp=P0;//temp=0xfe;EX1=1;}。