超声波测距数码管显示,内容完全正确
超声波测距实验技术及常见问题解答
超声波测距实验技术及常见问题解答1. 引言超声波测距技术是一种常见的测距方法,广泛应用于工业生产、医疗诊断等领域。
本文将介绍超声波测距实验的原理和常见问题解答。
2. 超声波测距原理超声波是指频率超过人耳听力范围的声波。
测距实验中使用的超声波传感器通过发射和接收超声波,并根据超声波的传播速度和回波时间来计算目标物体与传感器的距离。
超声波的传播速度大约为340米/秒,实验中可通过测量回波时间来计算距离。
3. 实验装置和步骤为了进行超声波测距实验,我们需要准备超声波传感器、控制电路、计时电路等实验装置。
首先,将超声波传感器安装在固定位置,确保与目标物体之间没有遮挡物。
接着,控制电路发射超声波信号,超声波传感器接收到回波信号后,计时电路记录下回波时间。
最后,通过计算回波时间和超声波传播速度,可以得到目标物体与传感器的距离。
4. 常见问题解答4.1 超声波测距会受到什么影响?超声波测距受到目标物体的形状、反射面的材质、环境温度等因素的影响。
例如,目标物体的形状不规则或表面粗糙会导致超声波的反射方向发生变化,影响测量精度。
此外,超声波的传播速度还受到温度的影响,需对测距结果进行修正。
4.2 如何提高测距的精度?为提高测距精度,可以采用多点测量的方法,即在目标物体的不同位置进行多次测距,然后取平均值。
此外,还可以使用更精密的控制电路和计时电路,以减小误差。
另外,合理安装传感器、确保传感器与目标物体之间没有遮挡物也会对测距精度有所影响。
4.3 超声波测距适用于哪些场景?超声波测距适用于室内和室外环境,可以用于测量近距离和中距离的目标物体。
在工业生产中,超声波测距常用于物品定位,例如在流水线上对物体进行测量和判定。
在医疗诊断中,超声波测距技术广泛应用于妇科检查、心脏超声检测等领域。
5. 结论超声波测距技术是一种常见且实用的测距方法,具有广泛应用前景。
本文介绍了超声波测距实验的原理和步骤,并解答了一些常见问题。
通过了解超声波测距技术的原理和注意事项,我们可以更好地应用于实际生产和科研工作中,提高测距的精度和准确性。
超声波物位计使用说明书
超声波传感器一、产品简介利用声波介质对被检测物进行非接触式和无磨损的检测。
超声波传感器对无论是透明性的物体还是有颜色的物体,金属物体或者非金属物体、以及固体、液体或是粉状物质,均能检测。
周围环境条件如有烟环境、灰尘环境或是下雨条件下几乎都不会影响超声波传感器的检测性能。
二、超声波测距原理发射超声换能器发射出的超声脉冲,通过传播媒质传播到被测介质,经反射后再通过传声媒质返回到接收换能器,测出超声脉冲从发射到接收在传声媒质中传播的时间。
再根据传声媒质中的声速,就可以算得从换能器到介质面的距离。
从而确定液位。
因此我们可以计算出探头到反射面的距离D = C*t/2(除以2是因为声波从发射到接收实际是一个来回,D是距离,C是声速,t是时间)。
三、产品特点高分辨率响应时间短数码管显示测量距离通过RS 232/485 完成参数设置丰富的输出方式:开关量、模拟量、RS232/485四、主要技术指标你五、安装指南5.1 安装注意事项(1)超声波传感器安装时发射面应垂直于被测物体; (2)电源线和输出信号线不要接反。
5.2安装尺寸⑴ 超声波传感器外形图:HFTCGQ_SMG 型:(2)超声波传感器尺寸图 HFTCGQ_SMG 型:功 能 一体型量 程 0.05~0.5m 0.1~1m 0.2~3m 0.2~4m 0.3~5m 0.3~6m探头频率200K 100K 65K 65K 50K 50K安装尺寸HFTCGQ_SMG 型 M60*1.5M18*1.5M27*1.5 M40*1.5 M40*1.5 M40*1.5M40*1.5分辨率 3mm 或0.1%(取大者) 响应时间 < 200ms显 示 LED , 数码管 发射角度 20°模拟输出 4~20mA/500Ω负载、0~5V开关量输出 继电器DC 30V/ 5A 、PNP/NPN (5V )(可选) RS232/485 MODBUS 协议或者厂家自定义协议(可选) 供 电 标配24V (±15%) 环境温度 -20~+60℃, 防护等级IP65 可选IP67超声波传感器5.3 实物安装HFTCGQ_SMG型:①在被测物体上方装一个法兰②法兰上放一片内径相同的垫片③把测距传感器对准法兰孔④将测距传感器放入法兰孔⑤从法兰底部看到的情况⑥法兰下放一片内径相同的垫片你⑦拧上螺母固定好测距传感器⑧给测距传感器接上电缆线HFTCGQ_ZL型:(停产)①在被测物体上方装一个法兰②把测距传感器对准并放入法兰孔③拧上螺母固定好测距传感器④给测距传感器接上探头线超声波传感器⑤给测距传感器接上电缆线5.4 接线方式电源:红线: 24VDC+ 黑线: 24VDC–1、4~20mA:蓝线: mA + 黄线: mA–2、0~5V:蓝线: V + 黄线: V–3、485/232通讯:黄线:T/R+ 蓝线: T/R–4、继电器信号:蓝线黄线你5、NPN信号:蓝线:NPN+ 黄线:NPN -6、PNP信号:蓝线:PNP+ 黄线:PNP-备注:1、输出信号选择(1~6)其中一种;2、要将黑线可靠接地;3、当测距传感器为mA模块时,也可将黄线(mA-)接地;六、信号说明HFTCGQ_SMG型:初始上电时,电源指示灯“绿灯”常亮。
超声波测距 实验报告
Q1
40106
图 6
7490 芯片的时钟接前一位的 Q3。最低位 7490 芯片的时钟接 17kHz TTL 方波(由信号 发生器提供)和闸门波形相与(或者相与非)的结果。闸门波形由下图所示的电路产生:
1 发(Q1)
D
SET
Q
Q3
CLR
Q
收
图 7
4、报警电路。
图 8
此部分的功能是通过存储器(用 74161 芯片)保存计数值,在报警时间(如图 8)内用 组合逻辑电路对计数值进行比较。若计数值小于 30(cm) (且小于存储器中的值) ,则利用
实验日期 2010-7-13~2010-7-15
实验室
222
座位号
23
清华大学电子工程系
电子技术课程设计 实验报告
超声波测距系统
班级 无 82 学号 2008011098 姓名 刘硕 交报告日期 2010-7-17
【实验任务】
1. 测量距离不小于 0.5m 米,数字显示,动态更新测量结果,更新时间约 1 秒。测量精 度优于 0.05m,显示精度 0.01m。 2.测量距离不小于 1.0m 米,数字显示,动态更新测量结果,更新时间约 1 秒。测量精 度优于 0.01m,显示精度 0.01m 3.测量距离不小于 2.0m 米,数字显示,动态更新测量结果,更新时间约 1 秒。测量精 度优于 0.01m,显示精度 0.01m 距离小于 0.3m 时,用蜂鸣片发出间歇式的“嘀一嘀”声响报 警。 4*.显示无跳动、闪烁,距离小于 0.3m 且距离变近时,用蜂鸣片发出间歇式的“嘀一嘀” 声响报警。
Ix<30cm Q3 BDC
图 10
实现距离小于 30cm 且距离变近报警的电路:
基于C51的超声波测距仪设计 —数码管显示
{
flag=0;
disbuff[0]=10; //“-”
disbuff[1]=10; //“-”
disbuff[2]=10; //“-”
}
else
{disbuff[0]=S%1000/100; //百位
disbuff[1]=S%1000%100/10; //十位
disbuff[2]=S%1000%10 %10;} //个位
unsigned char const discode[]
={ 0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F,0x40,0xff/*-*/};
//数码管显示码0123456789—和不显示
unsigned char const positon[3]={ 0xfc,0xfd,0xfe};
_nop_(); _nop_();_nop_(); _nop_(); _nop_();
_nop_();
TX=0;
}
}
实验结果
刻度值/m 实测值/m 误差/m
0.1
0.09
0.01
0.2
0.18
0.02
0.3
0.27
0.03
0.4
0.37
0.03
0.5
0.45
0.05
0.6
0.55
显示
timer++;
if(timer>=400)
{timer=0;
TX=1;
//800ms 启动一次模块
_nop_(); _nop_(); _nop_(); _nop_(); _nop_();
_nop_(); _nop_(); _nop_(); _nop_(); _nop_();
超声波测距模块使用说明
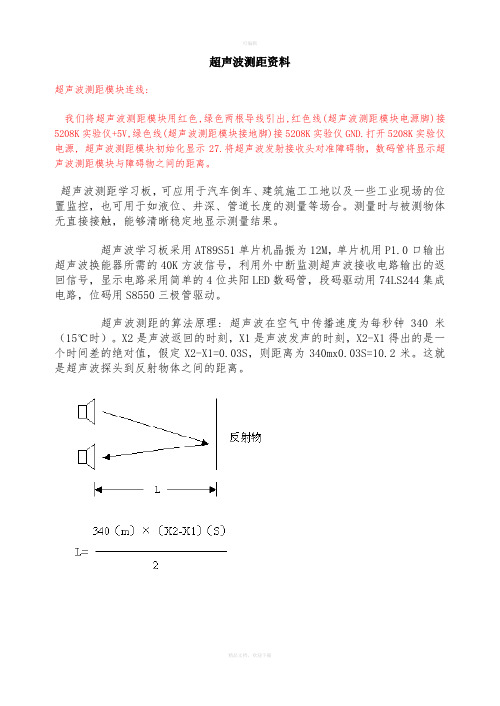
超声波测距资料超声波测距模块连线:我们将超声波测距模块用红色,绿色两根导线引出,红色线(超声波测距模块电源脚)接5208K实验仪+5V,绿色线(超声波测距模块接地脚)接5208K实验仪GND.打开5208K实验仪电源, 超声波测距模块初始化显示27.将超声波发射接收头对准障碍物,数码管将显示超声波测距模块与障碍物之间的距离。
超声波测距学习板,可应用于汽车倒车、建筑施工工地以及一些工业现场的位置监控,也可用于如液位、井深、管道长度的测量等场合。
测量时与被测物体无直接接触,能够清晰稳定地显示测量结果。
超声波学习板采用AT89S51单片机晶振为12M,单片机用P1.0口输出超声波换能器所需的40K方波信号,利用外中断监测超声波接收电路输出的返回信号,显示电路采用简单的4位共阳LED数码管,段码驱动用74LS244集成电路,位码用S8550三极管驱动。
超声波测距的算法原理: 超声波在空气中传播速度为每秒钟340米(15℃时)。
X2是声波返回的时刻,X1是声波发声的时刻,X2-X1得出的是一个时间差的绝对值,假定X2-X1=0.03S,则距离为340mx0.03S=10.2米。
这就是超声波探头到反射物体之间的距离。
产品性能特点:成品板上自带:超声波收发传感器、接收放大电路、四位LED数码显示、四位按键(四个按钮和蜂鸣器属于功能预留,程序中无定义),电源部分自带整流、滤波、稳压电路,允许交流7~15V或者直流9~16V输入,经过实际测试,测量范围可达27~250厘米,测量精度为1厘米。
下图是超声波测距学习板的元件布局图,以下是部分汇编源程序;/////////////////////////////////////////////////////// ; USE BY :超声波测距器; IC :AT89C51; TEL :; OSCCAL :XT (12M); display :共阳LED显示;/////////////////////////////////////////////////////// ;测距范围7CM-11M,堆栈在4FH以上,20H用于标志;显示缓冲单元在40H-43H,使用内存44H、45H、46H用于计算距离;VOUT EQU P1.0 ; 红外脉冲输出端口speak equ p1.1;********************************************;* 中断入口程序 *;********************************************;ORG 0000HLJMP STARTORG 0003HLJMP PINT0ORG 000BHretiORG 0013HRETIORG 001BHLJMP INTT1ORG 0023HRETIORG 002BHRETI;;********************************************;* 主程序 *;********************************************;START: MOV SP,#4FHMOV R0,#40H ;40H-43H为显示数据存放单元(40H为最高位)MOV R7,#0BHCLEARDISP: MOV @R0,#00HDJNZ R7,CLEARDISPMOV 20H,#00HMOV TMOD,#11H ;T1为 T0为16位定时器MOV TH0,#00H ;65毫秒初值MOV TL0,#00HMOV TH1,#00HMOV TL1,#00HMOV P0,#0FFHMOV P1,#0FFHMOV P2,#0FFHMOV P3,#0FFHMOV R4,#04H ;超声波肪冲个数控制(为赋值的一半)SETB PX0SETB ET1SETB EASETB TR1 ;开启测距定时器start1: LCALL DISPLAYJNB 00H,START1 ;收到反射信号时标志位为1CLR EALCALL WORK ;计算距离子程序clr EAMOV R2,#32h;#64H ;测量间隔控制(约4*100=400MS)LOOP: LCALL DISPLAYDJNZ R2,LOOPCLR 00Hsetb et0mov th0,00hmov tl0,00hSETB TR1 ;重新开启测距定时器SETB EASJMP Start1;;**************************************************** ;* 中断程序* *;****************************************************;T1中断,发超声波用 ;T1中断,65毫秒中断一次INTT1: CLR EAclr ex0MOV TH0,#00HMOV TL0,#00HMOV TH1,#00HMOV TL1,#00HSETB ET0SETB EASETB TR0 ;启动计数器T0,用以计intt11:CPL VOUT ;40KHZnopnopnopnopnopnopnopnopnopDJNZ R4,intt11;超声波发送完毕,MOV R4,#04Hlcall delay_250 ;延时,避开发射的直达声波信号SETB EX0 ;开启接收回波中断RETIOUT: RETI;外中断0,收到回波时进入PINT0: nopjb p3.2,pint0_exitCLR TR0 ;关计数器CLR EA ;CLR EX0 ;MOV 44H,TL0 ;将计数值移入处理单元MOV 45H,TH0 ;mov th0,#00hmov tl0,#00hjnb p3.2,$SETB 00H ;接收成功标志pint0_exit:RETI;;****************************************************;* 显示程序 *;****************************************************; 40H为最高位,43H为最低位,先扫描高位DISPLAY: MOV R1,#40H;GMOV R5,#7fH;GPLAY: MOV A,R5MOV P0,#0FFHMOV P2,AMOV A,@R1MOV DPTR,#TABMOVC A,@A+DPTRMOV P0,ALCALL DL1MSINC R1MOV A,R5JNB ACC.4,ENDOUT;GRR AMOV R5,AAJMP PLAYENDOUT: MOV P2,#0FFHMOV P0,#0FFHRET;TAB: DB 18h, 7Bh, 2Ch, 29h, 4Bh, 89h, 88h, 3Bh, 08h, 09h,0ffh ;共阳段码表 "0" "1" "2" "3" "4" "5""6" "7" "8" "9" "不亮""A""-" ;;**************************************************** ;* 延时程序 *;**************************************************** ;DL1MS:push 06hpush 07hMOV R6,#14HDL1: MOV R7,#19HDL2: DJNZ R7,DL2DJNZ R6,DL1pop 07hpop 06hRET;;**************************************************** ;* 距离计算程序 (=计数值*17/1000cm) *;**************************************************** ;work: PUSH ACCPUSH PSWPUSH BMOV PSW, #18hMOV R3, 45HMOV R2, 44HMOV R1, #00DMOV R0, #17DLCALL MUL2BY2MOV R3, #03HMOV R2, #0E8HLCALL DIV4BY2LCALL DIV4BY2MOV 40H, R4MOV A,40HJNZ JJ0MOV 40H,#0AH ;最高位为零,不点亮JJ0: MOV A, R0MOV R4, AMOV A, R1MOV R5, AMOV R3, #00DMOV R2, #100DLCALL DIV4BY2MOV 41H, R4MOV A,41HJNZ JJ1MOV A,40H ;次高位为0,先看最高位是否为不亮SUBB A,#0AHJNZ JJ1MOV 41H,#0AH ;最高位不亮,次高位也不亮JJ1: MOV A, R0MOV R4, AMOV A, R1MOV R5, AMOV R3, #00DMOV R2, #10DLCALL DIV4BY2MOV 42H, R4MOV A,42HJNZ JJ2MOV A,41H ;次次高位为0,先看次高位是否为不亮SUBB A,#0AHJNZ JJ2MOV 42H,#0AH ;次高位不亮,次次高位也不亮JJ2: MOV 43H, R0POP BPOP PSWPOP ACCRET;;**************************************************** ;* 两字节无符号数乘法程序 *;**************************************************** ; R7R6R5R4 <= R3R2 * R1R0超声波专用发射接收头,有T字样的是发射头,标有R字样的是接收头.。
超声波测距模块使用说明

超声波测距资料超声波测距模块连线:我们将超声波测距模块用红色,绿色两根导线引出,红色线(超声波测距模块电源脚)接5208K实验仪+5V,绿色线(超声波测距模块接地脚)接5208K实验仪GND.打开5208K实验仪电源, 超声波测距模块初始化显示27.将超声波发射接收头对准障碍物,数码管将显示超声波测距模块与障碍物之间的距离。
超声波测距学习板,可应用于汽车倒车、建筑施工工地以及一些工业现场的位置监控,也可用于如液位、井深、管道长度的测量等场合。
测量时与被测物体无直接接触,能够清晰稳定地显示测量结果。
超声波学习板采用AT89S51单片机晶振为12M,单片机用P1.0口输出超声波换能器所需的40K方波信号,利用外中断监测超声波接收电路输出的返回信号,显示电路采用简单的4位共阳LED数码管,段码驱动用74LS244集成电路,位码用S8550三极管驱动。
超声波测距的算法原理: 超声波在空气中传播速度为每秒钟340米(15℃时)。
X2是声波返回的时刻,X1是声波发声的时刻,X2-X1得出的是一个时间差的绝对值,假定X2-X1=0.03S,则距离为340mx0.03S=10.2米。
这就是超声波探头到反射物体之间的距离。
产品性能特点:成品板上自带:超声波收发传感器、接收放大电路、四位LED数码显示、四位按键(四个按钮和蜂鸣器属于功能预留,程序中无定义),电源部分自带整流、滤波、稳压电路,允许交流7~15V或者直流9~16V输入,经过实际测试,测量范围可达27~250厘米,测量精度为1厘米。
下图是超声波测距学习板的元件布局图,以下是部分汇编源程序;/////////////////////////////////////////////////////// ; USE BY :超声波测距器; IC :AT89C51; TEL :; OSCCAL :XT (12M); display :共阳LED显示;/////////////////////////////////////////////////////// ;测距范围7CM-11M,堆栈在4FH以上,20H用于标志;显示缓冲单元在40H-43H,使用内存44H、45H、46H用于计算距离;VOUT EQU P1.0 ; 红外脉冲输出端口speak equ p1.1;********************************************;* 中断入口程序 *;********************************************;ORG 0000HLJMP STARTORG 0003HLJMP PINT0ORG 000BHretiORG 0013HRETIORG 001BHLJMP INTT1ORG 0023HRETIORG 002BHRETI;;********************************************;* 主程序 *;********************************************;START: MOV SP,#4FHMOV R0,#40H ;40H-43H为显示数据存放单元(40H为最高位)MOV R7,#0BHCLEARDISP: MOV @R0,#00HINC R0DJNZ R7,CLEARDISPMOV 20H,#00HMOV TMOD,#11H ;T1为 T0为16位定时器MOV TH0,#00H ;65毫秒初值MOV TL0,#00HMOV TH1,#00HMOV TL1,#00HMOV P0,#0FFHMOV P1,#0FFHMOV P2,#0FFHMOV P3,#0FFHMOV R4,#04H ;超声波肪冲个数控制(为赋值的一半)SETB PX0SETB ET1SETB EASETB TR1 ;开启测距定时器start1: LCALL DISPLAYJNB 00H,START1 ;收到反射信号时标志位为1CLR EALCALL WORK ;计算距离子程序clr EAMOV R2,#32h;#64H ;测量间隔控制(约4*100=400MS)LOOP: LCALL DISPLAYDJNZ R2,LOOPCLR 00Hsetb et0mov th0,00hmov tl0,00hSETB TR1 ;重新开启测距定时器SETB EASJMP Start1;;**************************************************** ;* 中断程序* *;****************************************************;T1中断,发超声波用 ;T1中断,65毫秒中断一次INTT1: CLR EACLR TR0clr ex0MOV TH0,#00HMOV TL0,#00HMOV TH1,#00HMOV TL1,#00HSETB ET0SETB EASETB TR0 ;启动计数器T0,用以计intt11:CPL VOUT ;40KHZnopnopnopnopnopnopnopnopnopDJNZ R4,intt11;超声波发送完毕,MOV R4,#04Hlcall delay_250 ;延时,避开发射的直达声波信号SETB EX0 ;开启接收回波中断RETIOUT: RETI;外中断0,收到回波时进入PINT0: nopjb p3.2,pint0_exitCLR TR0 ;关计数器CLR EA ;CLR EX0 ;MOV 44H,TL0 ;将计数值移入处理单元MOV 45H,TH0 ;mov th0,#00hmov tl0,#00hjnb p3.2,$SETB 00H ;接收成功标志pint0_exit:RETI;;**************************************************** ;* 显示程序 *;**************************************************** ; 40H为最高位,43H为最低位,先扫描高位DISPLAY: MOV R1,#40H;GMOV R5,#7fH;GPLAY: MOV A,R5MOV P0,#0FFHMOV P2,AMOV A,@R1MOV DPTR,#TABMOVC A,@A+DPTRMOV P0,ALCALL DL1MSINC R1MOV A,R5JNB ACC.4,ENDOUT;GRR AMOV R5,AAJMP PLAYENDOUT: MOV P2,#0FFHMOV P0,#0FFHRET;TAB: DB 18h, 7Bh, 2Ch, 29h, 4Bh, 89h, 88h, 3Bh, 08h, 09h,0ffh ;共阳段码表 "0" "1" "2" "3" "4" "5""6" "7" "8" "9" "不亮""A""-" ;;****************************************************;* 延时程序 *;****************************************************;DL1MS:push 06hpush 07hMOV R6,#14HDL1: MOV R7,#19HDL2: DJNZ R7,DL2DJNZ R6,DL1pop 07hpop 06hRET;;****************************************************;* 距离计算程序 (=计数值*17/1000cm) *;****************************************************;work: PUSH ACCPUSH PSWPUSH BMOV PSW, #18hMOV R3, 45HMOV R2, 44HMOV R1, #00DMOV R0, #17DLCALL MUL2BY2MOV R3, #03HMOV R2, #0E8HLCALL DIV4BY2LCALL DIV4BY2MOV 40H, R4MOV A,40HJNZ JJ0MOV 40H,#0AH ;最高位为零,不点亮JJ0: MOV A, R0MOV R4, AMOV A, R1MOV R5, AMOV R3, #00DMOV R2, #100DLCALL DIV4BY2MOV 41H, R4MOV A,41HJNZ JJ1MOV A,40H ;次高位为0,先看最高位是否为不亮SUBB A,#0AHJNZ JJ1MOV 41H,#0AH ;最高位不亮,次高位也不亮JJ1: MOV A, R0MOV R4, AMOV A, R1MOV R5, AMOV R3, #00DMOV R2, #10DLCALL DIV4BY2MOV 42H, R4MOV A,42HJNZ JJ2MOV A,41H ;次次高位为0,先看次高位是否为不亮SUBB A,#0AHJNZ JJ2MOV 42H,#0AH ;次高位不亮,次次高位也不亮JJ2: MOV 43H, R0POP BPOP PSWPOP ACCRET;;****************************************************;* 两字节无符号数乘法程序 *;****************************************************; R7R6R5R4 <= R3R2 * R1R0超声波专用发射接收头,有T字样的是发射头,标有R字样的是接收头。
超声波测距用数码管显示
#include<reg52.h> //库文件#include <intrins.h>#define uchar unsigned char#define uint unsigned intsbit dula=P2^6; //申明U1锁存器的锁存端sbit wela=P2^7; //申明U2锁存器的锁存端sbit RX=P1^0;sbit TX=P1^1;uchar bai,shi,ge;unsigned int time=0;unsigned int timer=0;unsigned char posit=0;unsigned long S=0;bit flag =0;uchar code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};void delayms(uint xms){uint i,j;for(i=xms;i>0;i--) //i=xms即延时约xms毫秒for(j=110;j>0;j--);}/********************************************************/ void display(){dula=1;P0=table[bai]; //送段选数据dula=0;P0=0xff; //送位选数据前关闭所有显示,防止打开位选锁存时wela=1; //原来段选数据通过位选锁存器造成混乱P0=0x7e; //送位选数据wela=0;delayms(1); //延时dula=1;P0=table[shi];dula=0;P0=0xff;wela=1;P0=0x7d;wela=0;delayms(1);dula=1;P0=table[ge];dula=0;P0=0xff;wela=1;P0=0x7b;wela=0;delayms(1);}/********************************************************/ void Conut(){time=TH0;time=((time<<8)|TL0);TH0=0;TL0=0;S=(time*1.7)/100; //算出来是CMif((S>=700)||flag==1) //超出测量范围显示“-”{flag=0;bai=0;shi=0;ge=0;}else{bai=S%1000/100; //分出百,十,和个位shi=S%1000%100/10;ge=S%1000%10 %10;}}/********************************************************/void zd0() interrupt 1 //T0中断用来计数器溢出,超过测距范围{flag=1; //中断溢出标志}/********************************************************/void zd3() interrupt 3 //T1中断用来扫描数码管和计800MS启动模块{TH1=0xf8;//TL1=0x30;//display();timer++;if(timer>=10){timer=0;TX=1; //800MS 启动一次模块//_nop_();//_nop_();//_nop_();//_nop_();//_nop_();//_nop_();//_nop_();//_nop_();//_nop_();//_nop_();// _nop_();//_nop_();// _nop_();// _nop_();//_nop_();//_nop_();//_nop_();_nop_();_nop_();_nop_();_nop_();TX=0;}}/*********************************************************/void main( void ){TMOD=0x11; //设T0为方式1,GA TE=1;TH0=0;TL0=0;TH1=0xf8; //2MS定时TL1=0x30;ET0=1; //允许T0中断ET1=1; //允许T1中断TR1=1; //开启定时器EA=1; //开启总中断while(1){while(!RX); //当RX为零时等待TR0=1; //开启计数while(RX); //当RX为1计数并等待TR0=0; //关闭计数Conut();//计算}}/********************************************************************结束*********************************************************************/。
超声波测距仪实验报告
课题名称:超声波测距仪班级:应用电子0901:吴星超学号:0503090128指导老师:文博前言随着人类社会从工业化社会到信息化社会的发展,视觉传达设计经历了商业美术、工艺美术、印刷美术设计、装潢设计、平面设计等几大阶段的演变,最终成为以视觉媒介为载体,利用视觉符号表现并传达信息的设计。
对于每一位“为传达而设计”的设计者来说,如何正确、充分地传达信息是我们始终要面临的中心问题。
但是,在当今社会,由于科技的进步,社会环境和社会秩序的更新,各种视觉媒介的充斥,影响着人们的思维、观念和感情,仅仅把传达信息的关键词定位于正确和充分显然是不够的。
鉴于时代的要求与设计本质的要求,必须要把视觉传达设计的创新重视起来,以创新为前提充分准确地传达信息。
设计界存在着大量的抄袭、模仿之作,使得设计活动成为一种程式。
比如一说到大学标志,就等于是篆书外加一个圆托印章;一谈到VIS设计,便是大量相同的模版拷贝;一说到数码的视觉符号,就是一大堆蚂蚁般的“1”+“0”;一谈到商品的广告,就是戴眼镜的博士或美女的推荐代言等等。
人们无时无刻都被这些“东施效颦”的设计所侵犯和骚扰,这些设计给我们带来了视觉污染,人们不禁要问:设计究竟怎么了?面对这些,我们每一个设计师都责无旁贷。
现在该是大力宣扬“设计创新”的时候了,因为这个时代比以往任何时期都更需要清晰而独创的视觉传达设计。
那么,视觉传达设计的创新究竟体现在哪些方面?目录一、超声波测距仪的制作 (3)1.1 超声波测距的原理 (3)1.2 超声测距仪的硬件电路 (5)1.2.1回流信号放大电路 (5)1.2.2 信号检波电路 (6)1.3超声波测距程序设计 (7)二、总结: (20)三、参考文献 (20)一、超声波测距仪的制作1.1 超声波测距的原理根据相关的物理学知识,声音在介质中如空气和石头中传播时,其衰减特性与其频率相关,频率越高越不容易衰减,相应地其传播距离越远。
当声音的频率在20KHz以上的围时,超出了人耳的听觉围,变成了超声波,可以传播较远的距离而不衰减,且其本身的信号频率特性不容易受环境噪音的干扰。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《单片机课程设计》设计报告设计课题:超声波测距专业班级:电子信息工程xxx班学生姓名: wang da na 指导教师: cai 设计时间: 2015年7月9日赣南师范学院科技学院数学与信息科学系超声波测距一、设计任务与要求1.设计任务:(1)利用超声波测量距离。
(2)使用数码管显示测出的距离。
(3)在超出一定的范围后进行报警。
二、方案设计与论证1设计方案采用单片机来控制超声波测距,信号线发射到与超声波发射器相连的信号端,超声波发射器向既定方向发射,在发射的同时开始计时,超声波在空气中传播,途中碰到障碍物将产生回波,超声波接收器接收回波,产生电平变化。
通过单片机设计一个程序,处理超声波接受的信号,计算出发射与接受的时间差,并根据距离公式计算出距离,用数码管显示。
把所测出的距离分范围,超出2米或小于0.1米蜂鸣器报警,当处于正常范围时立即停止报警。
2 原理框图图(1) 系统原理框图51单片机数码管显示模块报警模块超声波模块三、电路设计1. 电路设计图(2)电路图2. 主要性能参数计算(1)超声波测距模块本测距系统采用超声波渡越时间检测法。
其原理为:检测从发射传感器发射的超声波经气体介质传播到接收传感器的时间t,这个时间就是渡越时间,然后求出距离l。
设l为测量距离,t为往返时间差,超声波的传播速度为c,则有l=ct/2。
超声波接收器收到反射波就立即停止计时。
再由单片机计算出距离,送数码管显示测量结果。
超声波测距的算法设计: 超声波在空气中传播速度为每秒钟340米(15℃时)。
t2是接收超声波时刻,t1是超声波声波发射时刻,t2-t1得出的是一个时间差的绝对值,假定t2-t1=0.03S,则有340m×0.03S=10.2m。
由于在这10.2m 的时间里,超声波发出到遇到返射物返回的距离如下:如图2-2-1为测距原理。
图(3)测距原理因为θ/2角度较小,可以忽略不计,所以L≈S。
超声波发出到遇到返射物返回的距离如下:L=C x ( t2 -t1 )/ 2 ;由于超声波也是一种声波,其声速c与空气温度有关,一般来说,温度每升高1摄氏度,声速增加0.6米/秒。
表2-1列出了几种温度下的声速。
表1 声速与温度的关系表温度(摄氏度)-30-20-10123100声速(米/秒)313319325323338344349386在使用时,如果温度变化不大,则可认为声速c是基本不变的,计算时取c为340m/s。
如果测距精度要求很高,则可通过改变硬件电路增加温度补偿电路的方法或者在硬件电路基本不变的情况下通过软件改进算法的方法来加以校正。
(2)单片机最小系统单片机最小系统,或者称为最小应用系统,是指用最少的元件组成的单片机可以工作的系统。
对52系列单片机来说,最小系统一般应该包括:单片机、晶振电路、复位电路。
单片机最小系统电路介绍:52单片机最小系统复位电路的极性电容C1的大小直接影响单片机的复位时间,一般采用10~30uF,51单片机最小系统容值越大需要的复位时间越短。
52单片机最小系统晶振Y1也可以采用12MHz,在正常工作的情况下可以采用更高频率的晶振,51单片机最小系统晶振的振荡频率直接影响单片机的处理速度,频率越大处理速度越快。
52单片机最小系统起振电容C2、C3一般采用15~33pF,并且电容离晶振越近越好,晶振离单片机越近越好4.P0口为开漏输出,作为输出口时需加上拉电阻,阻值一般为10k。
图(4)单片机最小系统设置为定时器模式时,加1计数器是对内部机器周期计数(1个机器周期等于12个振荡周期,即计数频率为晶振频率的1/12)。
计数值N乘以机器周期Tcy就是定时时间t。
设置为计数器模式时,外部事件计数脉冲由T0或T1引脚输入到计数器。
在每个机器周期的S5P2期间采样T0、T1引脚电平。
当某周期采样到一高电平输入,而下一周期又采样到一低电平时,则计数器加1,更新的计数值在下一个机器周期的S3P1期间装入计数器。
由于检测一个从1到0的下降沿需要2个机器周期,因此要求被采样的电平至少要维持一个机器周期。
当晶振频率为12MHz时,最高计数频率不超过1/12MHz,即计数脉冲的周期要大于2 ms。
3. 程序流程图图(5)程序流程图四、电路制作及调试1.实物图通过以上步骤,制作出实物图。
如图所示:图(6)数码管在正常范围显示图(7)数码管测出的数值2.电路调试电路主要的模块有三个:报警模块、单片机最小系统、超声波模块。
通过调节超声波模块与障碍物的距离,来显示出数据。
并与实际距离作对比,并计算误差。
3.元件清单表2元件清单器件型号数量电阻220,10k 10三极管8050NPN管 4 单片机芯片STC89C52 1四位数码管CL3461-AC 1杜邦线20cm 若干电容30pF,10uF 各一个蜂鸣器有源蜂鸣器 1晶振11.0592MHZ 1五参考文献[1]潘永雄.沙河.电子线路CAD实用教程(第四版)[M].西安电子科技大学出版社,2012.[2]高吉祥.电子技术基础实验与课程设计(第二版)[M].电子工业出版社,2005.[3]王港元.电子设计制作基础[M].江西科学技术出版社,2011.[4]彭介华.电子技术课程设计指导[M].高等教育出版社,2009[5] 李朝青.单片机原理及接口技术(第三版)[M].北京航空航天大学出版社,2006.[6] 阎石.数字电子技术基础(第五版)[M].清华大学电子学教研组出版社,2006.附录1:超声波测距程序********************************************************************* ***************************/#include <AT89x51.H> //器件配置文件#include <intrins.h>#define RX P0_1#define TX P0_2sbit beep=P3^7;unsigned int time=0;unsigned int timer=0;unsigned char posit=0;unsigned long S=0;bit flag =0;unsigned char const discode[] ={ 0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x40,0x80,0x7c,0 x39,0x5e,0x79,0x71/*-*/};unsigned char const positon[4]={ 0x20,0x10,0x08,0x40}; void Display(void) //扫描数码管{if(posit==0){P1=(discode[disbuff[posit]]);}else{P1=discode[disbuff[posit]];}P2=positon[posit];if( ++posit>=4){posit=0;}}void Conut(void){time=TH0*256+TL0;TH0=0;TL0=0;S=(time*1.7)/100; //算出来是CMif(S<10|S>200) //判断蜂鸣器响的数值范围beep=1;else beep=0;if((S>=700)||flag==1) //超出测量范围显示“-”{flag=0;disbuff[0]=10; //“-”disbuff[3]=11;disbuff[1]=10; //“-”disbuff[2]=10; //“-”}else{disbuff[0]=S%1000/100;disbuff[3]=11;disbuff[1]=S%1000%100/10;disbuff[2]=S%1000%10 %10;}}/********************************************************/void zd0() interrupt 1 //T0中断用来计数器溢出,超过测距范围{flag=1; //中断溢出标志}/********************************************************/void zd3() interrupt 3 //T1中断用来扫描数码管和计800MS 启动模块{TH1=0xf8;TL1=0x30;Display();timer++;if(timer>=400){timer=0;TX=1; // 启动一次模块_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();_nop_();TX=0;}}/*********************************************************/ void main( void ){TMOD=0x11; //设T0为方式1,GATE=1;TH0=0;TL0=0;TL1 = 0x66; //设置定时初值TH1 = 0xFC; //1ms// TH1=0xf8; //2MS定时// TL1=0x30;ET0=1; //允许T0中断ET1=1; //允许T1中断TR1=1; //开启定时器EA=1; //开启总中断while(1){while(!RX); //当RX为零时等待TR0=1; //开启计数while(RX); //当RX为1计数并等待TR0=0; //关闭计数Conut(); //计算}}赣南师范学院科技学院2014-2015学年第二学期期末考试《单片机课程设计》成绩评定表专业:电子信息工程班级:xxx 班学号:姓名:王da na 课题名称超声波测距设计任务与要求(1)利用超声波测量距离。
(2)使用数码管显示测出的距离。
(3)在超出一定的范围后进行报警。
评分标准基本功能(50)焊接制作(10)程序设计(10)扩展功能(20)个人发挥(10)总分(100)指导老师时间:年月日。