2011基于自由摆的平衡板控制系统
基于自由摆的平板控制系统--我的设计
B组基于自由摆的平板控制系统参赛学校:参赛学生:指导老师:联系方式:基于自由摆的平板控制系统摘要本控制系统由核心控制模块、角度采样模块、电机驱动模块、液晶显示模块、键盘控制模块等部分组成。
经实验证明本控制系统设计的各项指标都满足大赛的基本部分和核心部分的要求,部分设计实现大赛发挥部分,符合大赛目的。
关键字:STC12C5A60S单片机、角度传感器、L297、L298控制芯片、步进电机。
Abstract一、总体方案比较与论证方案一、方案二、利用STC12C5A60S2单片机作为控制系统,由单片机内部的AD转换模块对角度角度传感器 摆杆θ θ摆杆 平板平板二、各模块设计介绍1、角度采集模块设计根据题目要求,要保持平板平衡,需利用角度传感器随时测量旋转角度,角度传感器和单片机的连接2、键盘控制模块3、核心控制模块本设计的核心控制模块主要是由STC12C5A60S2单片机组成。
图14、液晶显示模块5、电机驱动模块12U1A74LS0734U1B 74LS071110U1E74LS071312U1F74LS07RED1ORANGE2Y E L L O W3PINK4B L U E5STEP MOTOR4 PHASE+12VORANGE PINKYELLOWBLUEREDABCD三、测试方案与测试结果在完成后进行调试时,采用的方法是首先分别调试各单元模块,调通后在进行整机调试的方法。
1、摆杆转动角度的测试。
2、键盘控制模块的调试。
3、液晶显示模块的调试。
4、单片机程序的调试。
5、步进电机转动角度的调试。
6、对设计的整体测试。
四、结论我们的设计利用单片机STC12C5A60S2作为核心控制,通过采集角度传感器的实时电压,利角度传感器采集来的数据和步进电机的状态实时显示在液晶屏上面,以便我们能够对系统的整体运行状态进行监控。
五、参考文献:。
自由摆平板系统高精控制设计
侯 满 赵 贺
( ; - " d - 州 交通 大学 自 动 化与 电 气工程 学院 , 甘 肃 兰州 7 3 0 0 7 0 )
摘
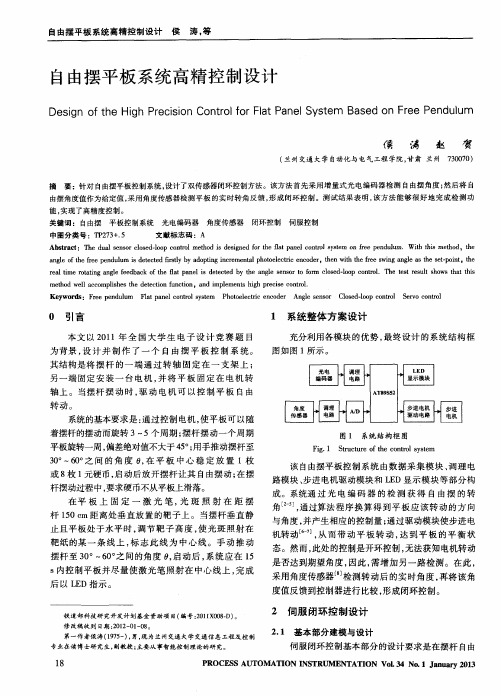
要 :针对 自由摆平 板控制 系统 , 设计 了双 传感 器闭环 控制 方法 。该方 法 首 先采 用 增量 式 光 电编 码 器检 测 自由摆 角度 ; 然后将 自
轴 上 。当摆 杆 摆 动 时 , 驱 动 电机 可 以 控制 平 板 自由 转动。
1 系统 整体方 案设计
充分利用 各模块 的优 势 , 最终设 计 的系统结 构框
图如图 1 所示 。
l I 编 码 器 电 H 卜 路 I 1 l I 显 L 示 E 模 D 块
0 引言
本文以2 0 1 1 年 全 国大 学 生 电子 设 计 竞 赛题 目
为 背景 , 设 计 并 制 作 了一 个 自由 摆 平 板 控 制 系 统 。 其结 构是将 摆 杆 的一 端 通 过转 轴 固定 在 一 支架 上 ; 另 一端 固定 安 装 一 台 电机 , 并 将 平板 固定 在 电机 转
. ... ..... ..... ...一
A} r 89 ¥ 52
系统的基本要求是 : 通过控制 电机 , 使 平板可 以随
着摆杆的摆动而旋转 3~ 5个周期 ; 摆杆 摆动一个周期 平板旋转一周 , 偏差绝对值不大于 4 5 。 ; 用手推动摆杆至
3 O 。 ~6 0 。 之间的角度 0 , 在 平 板 中心 稳 定 放 置 1枚 或8 枚1 元硬币 , 启 动后放开摆杆让其 自由摆 动 ; 在 摆
由摆角 度值作 为给 定值 , 采用 角度传 感器 检测 平 板 的实 时 转 角反 馈 , 形 成 闭环 控制 。测 试 结果 表 明, 该 方 法能 够 很 好地 完 成 检 测 功
基于自由摆的平板控制系统设计

基于自由摆的平板控制系统设计摘要设计以STC12C5A60S2单片机作为基于自由摆的平板控制系统的处理器,通过MMA7361加速度传感器对摆杆的位移、运动方向进行检测,利用单片机产生PWM波控制步进电机运动,实现摆动过程中8个硬币在平板上的稳定。
关键词STC12C5A60S2;自由摆;加速度传感器;步进电机2011年全国大学生电子设计竞赛B题——基于自由摆的平板控制系统中有一要求:用手推动摆杆至一个角度θ(θ在45°~60°间),调整平板角度,在平板中心稳定叠放8枚1元硬币,启动后放开摆杆让其自由摆动。
在摆杆摆动过程中,要求控制平板状态使硬币在摆杆的5个摆动周期中不从平板上滑落,并保持叠放状态。
如图1所示。
1 系统分析由于自由摆在运动过程中,运动方向上重力分量F1会随摆臂与轴线的夹角θ的改变而改变,其大小为:F1=Gcosθ若图2所示为系统起始位置,此时硬币在系统运动轨迹方向上无自身的重力分量,由于运动惯性,硬币必会掉落平板。
当平板与摆臂成垂直位置时,每个硬币的重力分量模式与自由摆的一致,在运动轨迹上形成与自由摆一致的运动,硬币就不会掉下来。
2 系统组成在实际搭建系统时,考虑到自由摆启动时控制步进电机转动的角度以及转动方向,采取了加速多传感器MMA7361对摆杆的位移、运动方向进行检测。
采用STC12C5A60S2单片机作为处理器,其自身带有8路10位A/D转换,用于采集加速度传感器信号,通过单片机产生PWM波送TB6560T2-V1驱动器驱动42BYGTC150-021型步进电机,控制平板平衡。
系统组成如图3。
系统在STC12C5A60S2单片机最小系统上完成了设计。
图4为MMA7361的连接图。
3 系统软件设计系统通过检测摆杆的位移、运动方向调整步进电机起始时的转动角度,从而达到控制目的。
由于启动时自由摆摆动与步进电机转动平板与摆杆垂直很难同步,设计上采取了锁钩装置,如图5所示,顺时针启动时电机逆时针转动脱离锁钩进入自由摆运动。
2011年电子设计竞赛_基于自由摆的平板控制系统【龙哥,尧总,portia】
基于自由摆的平板控制系统一、总体方案设计1.主控系统选择方案一:使用传统51单片机作为主控制器,价格低廉,但其运算速度慢,片内资源少,存储容量小,难以实现复杂的算法。
方案二:使用FPGA,CPLD等大规模可编程逻辑控制器件,其时钟频率很高,运算速度很快,但不适合于该题目。
方案三:使用基于ARM Cortex-M3内核的EasyARM1138单片机,它有8通道10位ADC,使用方便且低功耗。
方案比较:综合比较,选择方案三。
2.角度测量方案一:使用双轴倾角传感器SCA103T-D04,测量范围为±15度,可适用于垂直方向的各种角度的测量。
方案二:使用电位器作为角度传感器,由于不同角度输出的电阻值不同,通过AD采样电阻两端电压,计算得到角度。
方案三:使用Angtron-RE-38-V-Lite旋转编码器,角度测量范围为0~360°,根据不同角度,可直接输出不同的电压值,线性度好。
方案比较:对于方案一,虽然SCA103T精度较高,但它是基于加速度原理进行测量,使用SCA103T进行倾角检测时,应保证被测设备匀速运动,否则会引进误差,而在自由摆系统中,平板不是匀速运动。
虽然可以采用峰值滤波和一阶惯性滤波相结合的方式通过软件编程进行处理,但较繁琐。
对于方案二,对于一般的电位器,线性度较差,而对于线性度较好的电位器,如22HP-10等,价格较高。
对于方案三,使用该旋转编码器,可以直接对输出电压进行AD采样,计算得出角度值,使用方便。
综合考虑,选择方案三测量自由摆运动过程中的摆角。
3.电机选择方案一:使用伺服电机作为执行元件,运行精确,能高速制动,惯量小,适合闭环控制。
方案二:使用步进电机作为执行元件,由于步进电机是采用脉冲驱动,精度较高,适合开环控制。
方案比较:对于方案一,虽然伺服电机性能良好,但价格较高。
对于方案二,步进电机可以通过16细分可以减弱低频振动,控制方便,开环性能良好,可以适用于该设计。
基于自由摆的平板控制系统 (2)

基于自由摆的平板控制系统
基于自由摆的平板控制系统是一种常见的控制系统,常见
于气动、航空、机械等领域的平衡控制中。
自由摆是一个由摆杆和摆球组成的系统,摆杆与地面垂直,摆球可以沿水平方向摆动。
该系统受到外部扰动(如风力、力矩等)的影响,产生不稳定的摆动。
平板控制系统的目
标是通过传感器感知摆球的运动状态,然后通过控制器下
达指令,通过执行器对摆球进行控制,使得摆球保持平衡。
平板控制系统的基本原理是通过负反馈控制来实现。
传感
器会测量摆球的位置和速度,并将这些信息反馈给控制器。
控制器分析这些信息,并根据设定的控制策略计算出控制
命令。
执行器将控制命令转化为相应的动作,如施加力矩
或改变摆球的位置。
摆球的反馈信号再次被传感器检测到,从而形成一个闭环反馈控制系统,通过不断的调整和校正,使得摆球保持平衡。
这种平板控制系统可以应用于很多领域,例如飞机的平衡控制,风力发电机组的控制,机器人的姿态控制等。
通过合理的控制策略和算法设计,可以实现较好的控制效果,提高系统的稳定性和响应性能。
总结起来,基于自由摆的平板控制系统是一种通过传感器感知摆球状态,控制器计算控制命令,执行器对摆球进行控制的系统,以实现对摆球的平衡控制。
基于自由摆的平板控制系统最终年全国大学生电子设计竞赛完整版

基于自由摆的平板控制系统最终年全国大学生电子设计竞赛HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】2011年全国大学生电子设计竞赛基于自由摆的平板控制系统(B题)【本科组】2011年9月3日摘要采用ATmage16 avr单片机作为主控芯片的基于自由摆的平板控制系统。
利用高精度的电位器和单片机的片内模数转换器测量自由摆的摆动角度。
ULN2003N达林顿阵列驱动,1/16倍速的减速步进电机控制平板的转动。
能够实现根据摆杆角度平板转动相应角度、摆杆摆动一周期平板转动一圈、控制平板使得摆杆摆动时平板上的硬币不滑落、平板上的激光笔在摆杆摆动一定角度后照射到靶子中心线等要求。
关键词:自由摆 AVR单片机电位器减速步进电机目录基于自由摆的平板控制系统(B题)【本科组】1系统方案本系统主要由中央处理器模块、电机驱动模块、摆杆角度测量模块、电源模块组成,下面分别论证这几个模块的选择。
中央处理器的论证与选择方案一:目前应用很广泛的51系列单片机。
该系列的单片机具有价格低廉、性能稳定、技术成熟等特点。
但缺点也很明显,运行速度不是很快,而此次设计应需要较为复杂的运算,所以可能达不到要求。
方案二:AVR系列的单片机。
该系列单片机较于早期的51单片机,片内资源更丰富,接口也更强大,同时采用的是RISC精简指令集,在运行速度上较与51有绝对的优势。
而价格低廉的优势也同样存在。
方案三:ARM处理器。
ARM处理器主要应用于嵌入式系统的开发,支持Thumb(16位)/ARM(32位)双指令集,兼容性好,大量使用寄存器执行速度快。
单从性能上讲,AMR绝对强与AVR与51,但其价格昂贵,并不是很适合本次设计。
因此次设计需要设计加速度传感器对于角度的计算,需要较大的计算量,且系统对于精度的要求较高,故选择方案二。
电机驱动模块的论证与选择方案一:L298H桥式驱动芯片。
该芯片具有性能稳定、控制灵活、输出电流大等特点,可以很方便控制直流电机的转动方向。
基于自由摆的平板控制系统1
基于自由摆的平板控制系统(B题)摘要本平板控制系统是基于PIC16F877A单片机为主控芯片,将精确电位器与自由摆顶端相连,利用角度和电阻值的一一对应关系,通过单片机采集精确电位器两端电压的变化,转换为角度数在LCD液晶屏上显示,再经过A/D转换后得出步进电机所需要的脉冲数,来控制步进电机的转动,单片机对采集到的电压进行PID 控制算法,再通过改变PWM的占空比达到精确控制电机转速的目的。
本自由摆的平板控制系统的静态误差≤5°,采用精确电位器来感应摆角的变化这一设计思路也更加简易、准确,是本系统的亮点。
当自由摆摆动角度与电机旋转角度差别过大时,能够自动调整至稳定。
本系统能够很精确地实现平板的水平控制,是一个很好的自由摆平板控制方案。
关键字PIC16F877A PID控制算法精确电位器步进电机目录1系统方案的比较与选择 (3)1.1 控制器的选择 (3)1.2 算法的选择 (3)1.3 传感器的选择 (3)1.3 机械系统的选择 (3)2系统理论分析与计算 (4)2.1 系统总原理框图 (4)2.2系统理论分析与设计 (5)2.2.1 系统设计的总体思路 (5)2.2.2 分析运算过程 (5)3电路与程序设计 (6)3.1硬件电路的设计 (6)3.1.1 PIC16F877A最小系统的组成 (6)3.1.2 步进电机驱动电路的组成 (8)3.2程序的设计 (8)3.2.1程序功能描述与设计思路 (8)3.2.2程序流程图 (9)4测试方案与测试结果 (10)4.1测试方案 (10)4.2 测试条件与仪器 (11)4.3 测试结果及分析 (11)4.3.1测试结果(数据) (11)4.3.2测试分析与结论 (11)4.4 测试基本要求(发挥) (12)4.5 测试原理图(发挥) (12)4.6 测试结论及分析(发挥) (12)5结束语 (13)附录1:电路原理图 (14)附录1:源程序 (14)附录2:参考文献 (17)1系统方案的比较与选择1.1 控制器的选择方案一、采用最简单的51单片机采集电压数据。
基于自由摆的平板控制系统设计报告
基于自由摆的平板控制系统设计报告摘要基于自由摆的平板系统设计是设计基于STC12C5A6S2为核心的控制系统,采用电位器作为角度传感器采集自由摆倾角的信息,采用步进电机作为调整平板,当摆角变化时,电位器传给单片机内部AD一个电压值,单片机通过内部计算,得出角度值,通过角度值,计算出相应指令给传给L298N控制步进电机运转来调整平板,实现平板控制系统与摆杆的协调。
一、系统设计1.1设计要求a。
控制电机使平板可以随着摆杆的摆动而旋转(3~5 周),摆杆摆一个周期,平板旋转一周(360º),偏差绝对值不大于45°。
b。
在平板上粘贴一张画有一组间距为1cm 平行线的打印纸。
用手推动摆杆至一个角度θ(θ在30º~45º间),调整平板角度,在平板中心稳定放置一枚1 元硬币(人民币);启动后放开摆杆让其自由摆动。
在摆杆摆动过程中,要求控制平板状态,使硬币在5 个摆动周期中不从平板上滑落,并尽量少滑离平板的中心位置.c.用手推动摆杆至一个角度θ(θ在45º~60º间),调整平板角度,在平板中心稳定叠放8 枚1 元硬币,见图2;启动后放开摆杆让其自由摆动。
在摆杆摆动过程中,要求控制平板状态使硬币在摆杆的5 个摆动周期中不从平板上滑落,并保持叠放状态.根据平板上非保持叠放状态及滑落的硬币数计算成绩。
d.如图3 所示,在平板上固定一激光笔,光斑照射在距摆杆150cm 距离处垂直放置的靶子上。
摆杆垂直静止且平板处于水平时,调节靶子高度,使光斑照射在靶纸的某一条线上,标识此线为中心线。
用手推动摆杆至一个角度θ(θ在30º~60º间),启动后,系统应在15 秒钟内控制平板尽量使激光笔照射在中心线上(偏差绝对值<1cm),完成时以LED 指示。
根据光斑偏离中心线的距离计算成绩,超时则视为失败.二、系统方案的选择与论证2。
1 整体方案基于自由摆的平板控制系统选用STC12C5A6S2为核心的控制系统,采用电位器作为角度传感器采集自由摆倾角的信息,采用步进电机作为调整平板,当摆角变化时,电位器传给单片机内部AD一个电压值,单片机通过内部计算,得出角度值,通过角度值,计算出相应指令给传给L298N控制步进电机运转来调整平板,实现平板控制系统与摆杆的协调2。
基于单片机自由摆平衡板控制系统设计
基于单片机自由摆平衡板控制系统设计自由摆平衡板是一种利用现代科技与物理原理相结合的新型运动设备,它既具有娱乐性又有锻炼身体的功效。
随着社会的进步和科技的发展,越来越多的人开始注重健康和运动,因此自由摆平衡板成为了一种受欢迎的运动方式。
然而,一台稳定、高效的自由摆平衡板需要先进的控制系统来实现。
在当前的科技环境下,单片机作为一种主控芯片,被广泛应用于各类控制系统中。
在自由摆平衡板控制系统设计中,单片机扮演了至关重要的角色。
单片机可以通过内置的模拟输入输出接口来感知摆板的状态,通过程序设计来控制电机的转速,从而实现平衡板的平衡。
单片机不仅能够提高自由摆平衡板的稳定性,还可以实现各种功能,如倾斜角度检测、速度控制等。
因此,基于单片机的自由摆平衡板控制系统设计成为了一种创新且高效的解决方案。
为了实现自由摆平衡板控制系统的设计,首先需要对自由摆平衡板的原理和结构有充分的了解。
自由摆平衡板主要由底座、摆板、传感器、电机等部件组成。
底座是支撑整个设备的主体结构,摆板则是承载用户并进行倾斜运动的平台。
传感器用于感知摆板的倾斜角度,电机则用于根据传感器的信号来实现自由摆平衡板的控制。
在系统设计的初期,需要对这些部件的性能和工作原理进行详细的分析和测试。
在控制系统设计的过程中,需要考虑到摆板的倾斜角度、速度和加速度等因素。
单片机可以通过内置的PID控制算法来实现对这些参数的准确控制,从而实现对自由摆平衡板的实时控制。
PID控制算法是一种经典的反馈控制算法,通过调节比例、积分和微分三个参数来实现对系统的稳定性和响应速度的优化。
在自由摆平衡板控制系统设计中,PID控制算法的应用可以大大提高系统的稳定性和控制精度。
除了PID控制算法,单片机还可以通过其他高级控制算法来实现自由摆平衡板的控制。
例如,模糊控制算法可以在一定程度上提高系统的适应性和鲁棒性,神经网络控制算法可以实现对系统的自学习和自适应。
这些高级控制算法的应用可以进一步提升自由摆平衡板控制系统的性能和智能化水平。
论文 基于自由板的平板控制系统
2011年B题基于自由板的平板控制系统本系统以STC89C51单片机为控制中心,辅以必要的外围电路,以MX2125倾角传感器测量摆杆竖直方向倾角。
基于自由板的平板控制系统摘要本设计分析了测控系统的结构和特点,结合现代控制技术、微机技术以及单片机AT89C51处理器为代表的微电子技术设计了自由摆平衡控制系统,阐述了系统设计要求、设计方案和实现方法。
考虑到步进电机有定位精确、操作简单等特点,伺服机构采用步进电机作为执行元件。
系统是以单片机AT89C51最小系统作为控制系统,通过角度传感器测量自由摆与竖直方向的夹角,系统通过步进电机控制平板与摆杆间的角度,从而使硬币达到在平板上稳定的目的。
此外,通过步进电机控制平板的转动,使激光笔一直照在靶子的中心。
采用单片机内部时钟实现精确计时。
最后的实验表明,系统完全达到了设计要求,完成了所有基本和发挥部分的要求。
系统的软硬件设计都采用了模块化的设计思想。
硬件方面详细介绍了传感器电路、信号调理电路、STC89C51最小系统电路、电机驱动电路以及系统扩展所需的其它一些外围电路的设计,软件方面以硬件电路为基础分别进行了模块化设计。
为使系统控制更精确,在数据采集的过程中采用了非线性误差校正以及数字滤波等数据处理方法。
同时设计中考虑到可能存在的各种干扰因素,采用了软硬件结合的抗干扰技术,提高系统的稳定性。
最后对系统进行了模拟性能测试,测试结果表明,系统性能良好。
系统的个别环节还有待进一步优化和完善。
关键词:双轴加速度传感器步进电机单片机AT89C51Abstract:This article analyzes the structure and characteristics of microcomputer measure and control system,and desires a free pendulum balance control system based on modern control technology,microcomputer technology as well as microelectronic technology.Considering that motor has the characteristics of positioning accuracy aand simple operation,the system uses motor as actuator.The system is based on MCU minimum system of AT89C51 as the control system, through the angle sensor to measure the free swing and vertical angle, the system is controlled by a servo motor plate and the swinging rod angle, thereby allowing the coins to reach in the plate stabilization purposes. In addition, through the servo motor control plate rotates, so that the laser pen in the center of the target. Single chip internal clock accurate timing. Finally, the experiments show that, the system meets the design requirements, has completed all basic and the requirements to play a partThe syetem’s software and hardware design have adopted a modular design concept.The hardware aspect introduces sensor circuit,signal conditioning circuit,STC minimum system circuit,motor drivering circuit and other peripheral circuits’design required for the system expansion.The software part executes modulaur design respectively based on hardware.In order to make the systems control to be more precise,the project uses non-linear error correction.The design also consider the possibility variety of interfering factors that may exist,and uses a combination of hardware and software anti-interference technology to improve system stability.In the end,the paper carries out simulation system performance test,and test results show that the system performs well as expected.Some parts of the system remains to be further improved.Keyword:1.系统方案设计、比较与论证1、1 系统设计要求本课题的主要工作是设计一个基于嵌入式的自由摆平衡控制系统,设计目标是在自由摆的摆动过程中,使位于摆末端的平板始终保持水平状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
y = 1.9703x - 2721.9 R2 = 0.999526502700
2750 上方AD值
2800
2850
2900
下方A D 值
•
系列1 线性 (系列1)
2500
2520
2540
2560 2580 上方AD值
2600
2620
2640
根据几何关系,利用VC编 程计算出A角与C角的数值 关系,再利用Excel做线性 拟合处理即可得出两个传感 器的数值关系。
中心线45到60度
系列1 线性 (系列1)
下方A D 值
y = 2.2187x - 3372.1 R2 = 1
3000 2900
下方A D 值
2800 2700 2600 2500 2400 2600 系列1 线性 (系列1)
2350
2400 2450 上方AD值
2500
2550
中心线35到45度
2500 2450 2400 2350 2300 2250 2200 2150 2480
参赛题目:基于自由摆的平衡板控制系统 参赛队员: 潘道辉 唐昌志 陆世友
指导老师:唐亮
系统构成
本题需要两大系统: 机械系统(自由摆) 控制系统(控制电路、控制算法)
整体方案设计思路
• 要达到题目要求,平衡板的角度控制成为至 关重要的部分。所以控制平衡板转动的电机 、平衡板角度的反馈即传感器的选择是关键 。 • 采用闭环控制,利用设定的角度值去调整平 衡板角度,再利用反馈的角度值进行精确控 制。
PID算法
• 采用增量式PID进行角度调节
经验总结
• • • •
重在积累,厚积薄发; 准确定位,确定方案; 分工明确,团结协作; 认真仔细,坚持到底。
谢谢!
具体设计
• 控制电路设计:
• • • • AVR单片机最小系统 L298N电机驱动电路 MAX1241(AD)电路 电源电路
具体设计
• 程序设计:
• 模式检测与选择 • AD数值与角度的线性拟合 • PID控制算法
程序框图
开始 扫描拨码开关 是 拨下拨码开关? 否
拨下拨码开关1
拨下拨码开关2
拨下拨码开关3
系统方案结构框图
• 采用闭环控制系统
与电机连接 的传感器
单片机系统
电机驱动电路
平衡板电机
摆杆顶端 的传感器
我们的设计方案
• 系统主要组成:
• 电机:直流电机 • 传感器:导电塑料角位移传感器、 MAX1241(AD)。 • 控制器:AVR单片机、L298N驱动电路。
具体设计
• 机械系统:
• • • • 材料 与电机的连接 与传感器的连接 安装固定
拨下拨码开关4
拨下拨码开关5
执行基本要 求1程序模块 否 正常执 行完? 是
执行基本要 求1程序模块
执行基本要 求1程序模块
发挥1程序 模块
发挥2程序 模块
否
正常执 行完? 是
否
正常执 行完? 是 结束
否
正常执 行完? 是
否
正常执 行完? 是
几何关系
A 是摆杆偏离平衡位置的角度,
C 为平衡板上的激光灯指向中心线时需要转过的角度。
根据几何关系有:
而
B 可以由下面的公式得:
TanB 100(1 CosA) /(150100* SinA)
C A B
线性拟合
中心线20到35度
2250 2200 2150 2100 2050 2000 1950 1900 2300 y = 1.5583x - 1695.2 R 2 = 0.9986