机器人操作及位置调整
机器人操作调节说明书
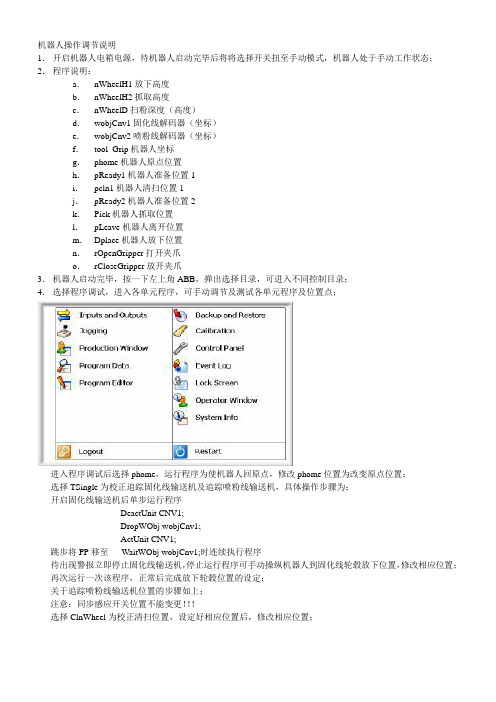
机器人操作调节说明1.开启机器人电箱电源,待机器人启动完毕后将将选择开关扭至手动模式,机器人处于手动工作状态;2.程序说明:a.nWheelH1放下高度b.nWheelH2抓取高度c.nWheelD扫粉深度(高度)d.wobjCnv1固化线解码器(坐标)e.wobjCnv2喷粉线解码器(坐标)f.tool_Grip机器人坐标g.phome机器人原点位置h.pReady1机器人准备位置1i.pcln1机器人清扫位置1j.pReady2机器人准备位置2k.Pick机器人抓取位置l.pLeave机器人离开位置m.Dplace机器人放下位置n.rOpenGripper打开夹爪o.rCloseGripper放开夹爪3.机器人启动完毕,按一下左上角ABB,弹出选择目录,可进入不同控制目录;4.选择程序调试,进入各单元程序,可手动调节及测试各单元程序及位置点;进入程序调试后选择phome,运行程序为使机器人回原点,修改phome位置为改变原点位置;选择TSingle为校正追踪固化线输送机及追踪喷粉线输送机,具体操作步骤为:开启固化线输送机后单步运行程序DeactUnit CNV1;DropWObj wobjCnv1;ActUnit CNV1;跳步将PP移至WaitWObj wobjCnv1;时连续执行程序待出现警报立即停止固化线输送机,停止运行程序可手动操纵机器人到固化线轮毂放下位置,修改相应位置;再次运行一次该程序,正常后完成放下轮毂位置的设定;关于追踪喷粉线输送机位置的步骤如上;注意:同步感应开关位置不能变更!!!选择ClnWheel为校正清扫位置,设定好相应位置后,修改相应位置;5.一般情况下不需要进行上述调整,在运行过程中出现少许偏差,可在程序数据中进行相应位置修改,进入robtarget,将看到各个位置点的对应坐标,如位置需在X轴加上20mm,可直接在坐标上修改,其他轴相应进行修改即可;6.机器人电箱电源一般情况下不关闭电源,长期不使用时可关闭电源,但需在隔2-3天开启电源使其控制箱充电2小时以上;7.当机器人因长期未能充电或者突然断电等原因造成机器人原点转数丢失,需对机器人进行转数清零动作,将机器人手动运转至各MASK(刻度线)处,然后进行更新转数计数器即可;8.需在机器人子程序中设定各种不同高度的轮毂的变量:抓取高度,清扫高度,放下高度三个重要的参数;在程序调试中进入PickUp_Cnv子程序中,CASE 1:!please modify the nWheelH and nWheelD number value !!!!Pick highnWheelH2 := -146;(此处为固化线放下高度,根据轮毂不同高度以不同的设定)nWheelH1 := -146; (此处为喷粉线抓取高度,根据轮毂不同高度以不同的设定)!Clean depthnWheelD := -118; (此处为清扫高度,根据轮毂不同高度以不同的设定)!Don not change below!!!PickWheel;ClnWheel;DropWheel;其中CASE 1:表示轮毂型号1,CASE 2: 表示轮毂型号2,CASE 3: 表示轮毂型号3,依次类推最多为CASE 14: 表示轮毂型号14;目前CASE 6: 表示轮毂型号6,nWheelH2 := -146; nWheelH1 := -146; nWheelD := -?;清扫高度需根据现场调整(注意将清扫装置定位),可根据相隔电眼高度进行大概的设定。
FANUC机器人参考位置功能介绍与设定方法

设定过程中出现异常提示
问题原因
可能是由于设定步骤错误、系统参数 设置不当或硬件故障导致。
解决方案
根据异常提示信息,检查设定步骤是 否正确,核对系统参数设置。如果问 题依旧存在,可能需要联系技术支持 进行排查。
应用价值评估
提高生产效率
通过设定合理的参考位置,可以 优化机器人的运动轨迹,减少无 效行程,从而提高生产效率。
降低维护成本
精确的参考位置设定可以减少机 器人的磨损和故障,降低维护成 本和停机时间。
增强产品品质
高精度的位置控制有助于提高产 品的加工精度和一致性,从而提 升产品品质。
未来发展趋势预测
参考位置功能可以帮助机器人快速定位到关键路径点,减少路径规划的
计算量和时间。
03
多机器人协同
在多机器人协同作业的场景中,各个机器人需要共享位置和姿态信息。
通过设定参考位置,可以实现多机器人之间的快速定位和协同运动。
相关术语解析
• 参考位置(Reference Position):在FANUC机器人中,参考位置是指用户设 定的一个或多个特定的机器人位置,用于后续操作中的快速定位或路径规划。
FANUC机器人参考位置功能 介绍与设定方法
目 录
• 参考位置功能概述 • 参考位置类型及特点 • 设定方法与步骤 • 常见问题与解决方案 • 案例分析与应用实例 • 总结与展望
01
参考位置功能概述
定义与作用
定义
参考位置功能是FANUC机器人中的一项重要功能,它允许用户设定一个或多个 特定的机器人位置作为参考点,以便在后续的操作中进行快速定位或路径规划。
机器人控制面板使用说明书
机器人控制面板使用说明书一、简介机器人控制面板是一款用于控制机器人运动和操作的设备。
它具有简洁直观的用户界面和丰富的功能,方便用户轻松控制机器人的各项操作。
本说明书将详细介绍机器人控制面板的使用方法和功能。
二、产品规格1. 外观尺寸:长 x 宽 x 高(单位:毫米)2. 重量:(单位:千克)3. 控制方式:无线遥控4. 电源:电池供电(电池容量等具体参数)5. 适用机器人型号:(填写适用的机器人型号)三、使用方法1. 开机与连接步骤1:确认机器人控制面板电源已打开。
步骤2:打开机器人电源,确保机器人处于正常工作状态。
步骤3:按下机器人控制面板上的连接按钮,等待机器人与控制面板成功建立连接。
2. 主界面介绍机器人控制面板的主界面显示了机器人的当前状态和各项操作按钮。
界面元素包括:- 机器人状态指示灯:显示机器人连接状态,绿灯表示连接成功,红灯表示连接异常。
- 摇杆控制按钮:用于控制机器人的运动方向。
- 功能按钮:包括机器人特定功能的按钮,如抬起、放下、旋转等。
- 设置按钮:用于打开设置菜单,设置机器人参数和控制面板选项。
- 声音控制按钮:用于调节机器人的声音大小。
3. 操作指南步骤1:使用摇杆控制按钮控制机器人的前进、后退、向左转、向右转等运动方向。
根据摇杆的上下左右移动,机器人将相应地做出相应动作。
可以微调摇杆的位置来达到所需的运动效果。
步骤2:根据实际需要,使用功能按钮进行特定操作。
例如,按下抬起按钮使机器人抬起杆,按下放下按钮使机器人放下杆,按下旋转按钮使机器人旋转等。
步骤3:如需调整机器人的声音大小,可以使用声音控制按钮进行调节。
4. 设置菜单机器人控制面板提供了设置菜单,可以根据需要进行个性化设置。
可设置的选项包括:- 语言:选择显示语言(中文、英文等)。
- 通知设置:设置机器人状态提示音开关。
- 连接设置:重新连接机器人或更改连接密码。
- 关于:显示机器人控制面板的相关信息。
- 其他选项:根据实际情况添加其他的个性化设置选项。
KUKA机器人基本手动操作

KUKA机器人基本手动操作一、操作前的准备在进行KUKA机器人的基本手动操作之前,首先需要确保机器人处于安全的状态。
这包括确保机器人的电源已关闭,以及所有的移动部件都处于安全的位置。
为了保护机器人免受损坏,绝对不要在手动操作时使用超过机器人规格的外部工具或附件。
二、启动机器人在接通电源并确保所有安全保护装置都正常工作后,可以启动机器人。
通常,这只需要在控制面板上按下“启动”按钮。
在启动过程中,如果机器人发出任何异常声音或显示异常信息,应立即停止启动并检查是否存在问题。
三、手动控制机器人在机器人启动后,可以通过控制面板或者示教器进行手动控制。
控制面板通常包括各种按钮和开关,可以用来控制机器人的移动、速度、旋转等。
示教器则是一种更高级的控制设备,可以用来精确地控制机器人的运动轨迹。
在进行手动操作时,应始终保持对机器人的完全控制,避免任何可能导致碰撞或损坏的操作。
如果机器人遇到任何异常情况或故障,应立即停止操作并寻求专业帮助。
四、安全注意事项在进行任何手动操作时,安全始终是第一位的。
因此,必须严格遵守所有相关的安全规定和操作指南。
这包括但不限于定期检查和维护机器人的各个部件,始终保持机器人在大家的视线范围内,以及在任何情况下都不要试图超出机器人的能力范围。
KUKA机器人的基本手动操作虽然需要一定的技能和经验,但只要遵守了相关的安全规定和操作指南,就可以安全、有效地控制机器人。
在工业自动化的世界中,ABB机器人无疑是最为引人注目的存在。
作为全球领先的机器人技术提供商,ABB机器人在各种行业和领域中都得到了广泛的应用。
而今天,我们将聚焦于ABB机器人的手动操作,探索这一技术如何赋予人类更强大的能力。
我们需要理解ABB机器人的基本构成和操作原理。
ABB机器人是一种具有高度灵活性和适应性的自动化机器,它们通过复杂的算法和感应系统来执行任务。
在手动操作时,我们主要是通过控制器和示教器来对机器人进行编程和操作。
手动操作ABB机器人需要一定的技巧和经验。
工业机器人操作指南
工业机器人操作指南一、机器人操作前准备1.工作环境确认:确保工作环境干燥、通风良好,没有明显的震动和噪音干扰,并保持清洁,以防止机器人受到尘埃和杂物的干扰。
2.系统电源准备:检查机器人的电源是否正常接入,并确保电源电压符合要求。
3.资源准备:检查所需的工具、备用零件和其他必要的资源是否在就位,以便在需要时能够迅速进行维护和更换。
4.安全措施:确保机器人周围的安全装置和防护设施完好无损,并提醒操作人员遵守相关的安全操作规程。
二、机器人的基本操作1.开机与关机:按照操作手册的指示,正确地开启和关闭机器人,以确保其正常运行和安全停机。
2.控制模式切换:根据需要,切换机器人的自动模式、手动模式或示教模式,以满足不同的工作要求。
3.应急停止:掌握机器人的应急停止按钮的位置和使用方法,以应对突发情况。
4.示教操作:使用机器人的示教装置,根据工艺要求输入或记录轨迹和操作动作,以便机器人能够按照预定的路径和动作进行工作。
5.程序运行:按照设定好的程序,启动机器人的自动运行,确保执行过程中没有异常情况发生。
6.运动控制:掌握机器人运动控制的方法,包括轴控制和坐标系控制,以便对机器人的运动进行精确控制。
7.状态监控:时刻关注机器人的状态显示,包括工作状态、报警信息和运行参数,以便及时发现并解决问题。
三、机器人的安全操作1.安全区域设置:确定机器人的安全区域,并采取相应的措施,包括设立栅栏、安装光幕或设置软件限制区域,以保护周围的人员和设备免受机器人的伤害。
2.急停按钮:了解机器人的急停按钮的位置和使用方法,并随时准备按下急停按钮,以应对紧急情况。
3.人机合作:在进行人机合作操作时,确保与机器人的接触安全和可靠,避免受伤。
4.操作规范:操作人员应严格遵守机器人的操作规程和安全操作指南,避免任何不正确的操作和违反规定的行为。
四、机器人的日常维护1.清洁保养:定期清洁机器人的表面和关键部件,移除尘埃和杂物,保持机器人的良好工作状态。
简述工业机器人的装调步骤

简述工业机器人的装调步骤工业机器人装调是指在机器人安装完成后,对其进行各项测试和调试,以确保其正常运行和达到预期功能的过程。
下面将简要介绍工业机器人的装调步骤。
1. 安装基础设施:在开始装调之前,需要为机器人安装好基础设施,包括机器人底座、固定螺栓、安全栏杆等。
这些设施的安装需要严格按照相关规范和要求进行,以确保机器人的稳定和安全。
2. 连接电源和信号:将机器人与电源以及控制系统进行连接。
首先,需要对电源进行正确接线,确保机器人能够正常供电。
其次,将机器人的各个关节与控制系统进行连接,确保信号传输畅通。
3. 设置机器人参数:在进行装调之前,需要对机器人的各项参数进行设置。
这些参数包括机器人的工作速度、加速度、精度等。
通过调整这些参数,可以使机器人在工作过程中达到最佳效果。
4. 进行零位调整:零位调整是指将机器人的各个关节调整到初始位置。
这是为了使机器人能够准确地执行后续的动作。
通过调整关节的零位,可以确保机器人在执行任务时的准确性和稳定性。
5. 进行关节控制:在进行关节控制之前,需要先对机器人进行关节坐标系的设置。
然后,通过控制系统对机器人的各个关节进行控制。
可以通过手动操作或者编写程序实现关节的运动控制,以验证机器人的关节运动是否正常。
6. 进行轨迹控制:轨迹控制是指对机器人执行轨迹运动的控制。
在进行轨迹控制之前,需要先确定机器人的运动轨迹。
可以通过编写程序或者手动操作来指定机器人的运动轨迹,然后通过控制系统对机器人进行控制,使其按照指定的轨迹运动。
7. 进行传感器校准:如果机器人需要使用传感器进行工作,那么在装调过程中还需要对传感器进行校准。
传感器的校准包括对其灵敏度、精度等进行调整,以确保其能够准确地感知环境和执行任务。
8. 进行安全验证:在完成上述步骤之后,需要对机器人进行安全验证。
通过模拟实际工作环境,测试机器人在不同场景下的安全性能。
这包括对机器人的碰撞检测、急停功能等进行测试,以确保机器人在工作过程中不会对人员和设备造成伤害。
ABB机器人的手动操作
ABB机器人的手动操作ABB机器人是一种自动化机器人,能够进行高度精确的自动化操作,但它也具备手动操作功能。
手动操作是指当人工干预或需要进行一些不规则的操作时,操作人员可以手动控制机器人进行运动或执行任务。
下面将介绍ABB机器人的手动操作及其相关内容。
一、手动控制盒介绍在手动控制盒上,有两个重要的按钮:播放按钮和调试按钮。
播放按钮是用来开始和停止机器人的移动,通过按下按钮,机器人会进行相应的操作。
调试按钮是用来进入调试模式的,可以在该模式下进行性能监控、参数调整、系统网络配置等操作。
二、手动操作模式1.关节模式:关节模式下,机器人的手臂关节可以单独控制。
通过手动控制盒上的手柄,操作人员可以控制机器人每个关节的运动方向、速度和位置。
这种模式适用于需要对关节进行精确控制的操作,例如调整机器人手臂姿势、手动示教等。
2.线性模式:线性模式下,机器人的手臂可以在笛卡尔坐标系下进行完整的位移、旋转等动作。
通过手动控制盒上的手柄,操作人员可以控制机器人在三维空间中的位置和方向。
这种模式适用于需要对整个机器人进行精确控制的操作,例如移动到指定位置、进行拾取放置等。
3.示教模式:示教模式下,机器人可以记录并重放操作人员手动进行的动作。
通过手动控制盒上的按钮,操作人员可以将自己的动作记录下来,并保存在机器人控制系统中。
然后,机器人可以根据这些记录的动作进行自动化操作,实现自动的重复任务。
这种模式适用于需要对机器人进行复杂操作的任务,例如零件装配、焊接等。
三、手动操纵与程序控制虽然ABB机器人的手动操作功能非常强大,但在实际应用中,它一般与程序控制相结合。
机器人可以根据预先编写的程序进行自动化操作,而手动操作则用于进行一些特殊的场景或调试工作。
在实际操作中,手动操作通常用于以下几个方面:1.机器人运动测试:通过手动控制盒,操作人员可以手动移动机器人的各个关节,检查机器人的运动是否正常。
这对于机器人的调试和故障排除非常重要。
Abb机器人调试步骤

2015年 03 月 31 日实施Q/RT 20002-2004ABB 机器人调试规范武汉人天包装技术有限公司 发布前言为了培养和加强设计人员、现场安调人员对ABB机器人知识的了解和熟悉,规范安调人员对ABB机器人的调整,特编写《ABB机器人调试规范》。
本标准起草单位:人天公司电气所。
本标准主要起草人: 朱学建。
目录序言............................................................................................................................................................一、安装机器人 ........................................................................................................................................1-1 ABB机器人控制柜1-1-1控制柜的安装21-1-2控制柜的构造1-2机器人本体1-3机器人本体与控制柜的连接二、认识机器人 ........................................................................................................................................三、序列号恢复的运用 ............................................................................................................................四、ABB机器人的基础操作...................................................................................................................4-1语言设置4-2备份与恢复4-2-1备份4-2-2恢复44-3手动机器人4-4校准五、系统I/O配置及接线.........................................................................................................................六、检查信号............................................................................................................................................七、导入程序............................................................................................................................................八、工件坐标系设定 ................................................................................................................................九、校基准点 (49)十、调整参数............................................................................................................................................10-1 微调纸箱的长宽高10-2修改已经码放的纸箱数量710-3微调抓取位置10-4微调码垛摆放位置十一、手动调试 ........................................................................................................................................十二、自动运行 ........................................................................................................................................十三、注意事项 ........................................................................................................................................序言本手册主要针对ABB关节机器人在码垛生产线运用的调试。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人操作及位置调整
机器人操作及位置调整是指对机器人进行指令控制和位置调整的过程。
在机器人运行过程中,有时需对其进行操作指令的输入,并根据实际需求
对其位置进行调整,以达到特定的工作目标。
本文将从机器人操作流程和
位置调整两个方面进行详细介绍。
一、机器人操作流程
1.确定操作目标:在操作机器人之前,首先需要明确操作的目标是什么。
例如,需要机器人移动到特定的位置、执行特定的动作、采集特定的
数据等。
2.操作指令输入:根据操作目标,向机器人输入相应的操作指令。
操
作指令可以通过计算机、控制面板、语音控制等方式进行输入。
3.指令解析和执行:机器人接收到操作指令后,需要对指令进行解析,理解其中的含义,并将指令转化为相应的动作。
然后,机器人执行这些动
作来完成操作目标。
在执行过程中,机器人需要根据环境的变化不断调整
动作,以保证操作的准确性和安全性。
4.运行监控和控制:在机器人操作过程中,需要对机器人的运行状态
进行监控和控制。
包括检测机器人的位置、速度、电量等指标,并根据需
要进行相应的调整。
二、机器人位置调整
机器人位置调整是指对机器人的位置进行精确定位和调整,使其达到
预定位置或适应特定工作要求的过程。
机器人位置调整主要有以下几个方面:
1.位置标定:在机器人操作之前,首先需要对机器人进行位置标定。
位置标定是指确定机器人运动的参考坐标系,并将其与实际环境进行对齐。
位置标定通常需要使用传感器来获取环境信息,如激光雷达、摄像头等。
2.位姿估计:位姿估计是指通过传感器获取机器人当前的位置和朝向
信息。
通过分析传感器数据,可以获得机器人相对于参考坐标系的位置和
朝向。
根据位姿估计结果,可以对机器人的位置进行调整。
3.闭环控制:闭环控制是指将机器人实际位置与预期位置进行比较,
并根据误差进行相应的调整。
通过传感器获取机器人实际位置信息,并与
目标位置进行比较,计算出误差,并对机器人进行调整,使其逐渐接近目
标位置。
4.路径规划:路径规划是指在机器人的工作空间中,规划出最佳的运
动路径,以达到特定的操作目标。
路径规划可以根据机器人的动力学特性、环境约束、工作要求等因素进行优化,以实现效率和安全性的平衡。
综上所述,机器人操作及位置调整是指对机器人进行操作指令的输入
和根据实际需求对其位置进行调整的过程。
通过精确的操作和位置调整,
可以使机器人更加灵活、准确地执行各种工作任务,提高机器人的工作效
率和安全性。