i伺服电机参数表
恒温摇床I技术参数确认表

特殊功能需求
2
主要技术参数
(一行只写一个参数)
2.1
参数1
转动半径≥10mm
2.2
参数2
转动速度:0~80转/分,可调
2.3
参数3
2.6
参数6
无刷电机驱动
2.7
参数7
托盘数量:≥2块
2.8
参数8
摆振幅度 :¢26mm
2.9
参数9
控温精度:±0.1℃
2.10
参数10
容积:≥598×424×676mm
3
配置需求
(一行只写一个配置)
3.1
配置1
摇床主机(含通用平台)1台
3.2
配置2
瓶夹标配 :250ml×24一套
4
售后服务
4.1
保修年限
主机1台
3.2
配置2
通用托盘1块
4
售后服务
4.1
保修年限
≥3年
4.2
出现故障回应时间
维修到达现场时间≤ 6小时(本地)
维修到达现场时间≤24小时(外地)
4.3
维修支持
配件供应时间≥10年
4.4
耗材及零配件
提供耗材及主要零配件目录(含报价)
4.5
维修资料
提供详细操作手册、维修保养手册、安装手册等
4.6
维修到达现场时间≤ 6小时(本地)
维修到达现场时间≤24小时(外地)
4.3
维修支持
配件供应时间≥10年
4.4
耗材及零配件
提供耗材及主要零配件目录(含报价)
4.5
维修资料
提供详细操作手册、维修保养手册、安装手册等
4.6
维修工具
西门子伺服电机_蜗轮蜗杆减速机 西门子伺服电机选型手册

西门子伺服电机_蜗轮蜗杆减速机西门子伺服电机选型手册性能特点1.ANRV系列采用单级蜗轮蜗杆传动,也可由两种机座号配合成双级减速传动。
2.箱体、法兰盘、端盖等零件采用优质铝合金压铸而成,外形轻巧美观、结构紧凑、体积小、重量轻,节省安装空间,且不易锈蚀。
3.配套电机采用铝壳电机,散热性能好,安全可靠、效率高、传动平稳、振动小、噪音低。
4.配套动力输出及转矩输出的多种连接结构,满足各种连接需要;箱体外形设计及底脚孔设置布局适应多种安装方式,通用性强。
5.箱体上设置加油孔和放油孔,润滑油定期更换,不宜损耗变质,便于维护保养。
6.由单级蜗杆减速器组合而成的双级蜗杆减速机,具有单级蜗杆减速机的一切优点,可获得较大的传动比。
7.根据用户需要可提供本样本之外的速比和结构形式。
场所条件1.环境温度在-40℃~50℃条件下额定运行。
(0℃以下启动时润滑油要加热到0℃以上)2.海拔不超过1000m。
3.输入转速不大于1500r/min。
4.可用于正反运转,无行业限制ANRV系列蜗轮蜗杆减速电动机型号说明型号说明1.ANRV—蜗轮蜗杆减速机产品代码。
2.整机结构:无代码…单级 E…双级。
3.入轴连接方式:无代码…单输入轴 B…双输入轴 D…带电机输入法兰DB…一端带输入轴,一端带电机输入法兰。
4.产品规格:单级以蜗轮副中心距表示,如75。
双级以两对蜗轮副中心距表示,如40/63。
5.安装型式:单级有B3、B6、B7、B8、V5、V6六种。
双级有AS1、AS2、BS1、BS2、VS1、VS2、PS1、PS2八种。
6.电机功率:配用Y2、YS系列电机,由B5、B14两种安装型式,如2.2(B14)。
(如带输入法兰而没有电机,只填写电机安装型式)。
7.理论传动比:如i=20。
8.附件:A…单输出轴 B…双输出轴 D…防护罩E…转矩臂 F…输出法兰(ANRV40、50、63有F、FB、FL三种形式)。
型号标记选型说明1.为正确选用ANRV系列蜗轮蜗杆减速机,首先应了解以下几点:●负荷条件●使用转速范围或传动比●工作运转情况及环境●安装空间2.确定工作情况系数K1及工作情况修正系数K2根据表一,决定机械负荷种类A、B、C根据运转时间(小时/日)和启动频率(次/小时)从图1中求得工作情况系数K1根据表二,查取工作情况修正系数K23.选定减速机用户须确定工作机输入机械负荷T(转矩),以T乘以工作情况系数K1,再乘以工作情况修正系数K2,即获得减速机应有的输出转矩值,以此为依据,并结合传动比值或输出转数值,选定所需减速机规格。
发那科FANCIαi伺服电机型号参数

发那科FANCIαi伺服电机型号参数Motor Model αiF 1/5000αiF 2/5000αiF 4/4000αiF 8/3000αiF 12/3000Rated output(kw)0.50.75 1.4 1.63Stalling torque(Nm)124812Max.speed(r/min)50005000500030003000Ro tor intertia(kgm 2)0.000310.000530.00140.00260.0062Driver(αi SV)80Specification A06B-0202-Bxyz A06B-0205-Bxyz A06B-0223-Bxyz A06B-0227-Bxyz A06B-0243-BxyzMotor Model αiF 22/3000αiF 30/3000αiF 40/3000Rated output(kw)476Stalling torque(Nm)223038Max.speed(r/min)300030003000Rotor intertia(kgm 2)0.0120.0170.022Driver(αi SV)80SpecificationA06B-0247-BxyzA06B-0253-BxyzA06B-0257-BxyzNote2:Straight shaft with key way 3:Taper shaft,with break A06B-0257-Bxyzx :0:Taper shaft 1:Straight shaft1: with Fan (only for aiF 40) 2: with High-T orque Brake *14:Straight shaft,with break5:Straight shaft with key way,with break y :0: standardz :0:Pulsecoder aiA1000 1:Pulsecoder aiI1000 2:Pulsecoder aiA160003: with High-Torque Brake , with Fan *1 *1): "x" should be from 3 to 5αiF 伺服电机简明规格参数20401609533000αiF 40/3000i with fan0.022FANUC伺服电机按驱动电压可分为高压电机(400VHV)和低压电机(200V);按产品系列可以分αi系列和βiS系列两大类;这两大系列伺服电机又依次可以分为αiF、αiS、αiF(HV)、αiS(HV)和βiS、βiS(HV)等子类。
伺服电机选型计算

分度盘 机构选 型计算 表格
分度盘直
径
DT=
分度盘厚
度
LT=
工作物直
径
DW=
工作物厚
度
LW=
工作台材
质密度
ρ=
工作物数 量
n=
由分度盘中心至工作 物中心的距离
l=
定位角度
θ=
定位时间
t=
加速时间
比
A=
减速机减
速比
i=
减速机效
率
ηG=
0.2 m
0.118 m
*
0.03 m
*
0.05 m
*
2700 kg/m3
*
10 个
*
0.125 m
180 °
*
3s
*
10%
10
1
1)决定 加减速时 间
加速时间
2)电机转 速
t0= t*A
= 0.3
s
360 t 0(t t 0)
减速机输 出轴角加 速度
减速机输 出轴最大 转速
电机轴角 加速度
电机输出 轴转速
3)计算负 载转矩
因为摩擦负载及小, 故忽略
4)计算电 机轴加速 转矩(克 服惯量)
工作台的 惯量
工作物的 惯量
(工作物同时绕工作物中 心轴旋转,如果工作物没有 自转,可以不考虑这部分 惯量)
工作物质 量
βG= 360
t 0(t t 0)
= 3.878518519 rad/s2
βG t0 2
N= = 11.11111111 rpm
βm= βG*i = 38.78518519 rad/s2
NM= N*i = 111.1111111 rpm
FANUC伺服电机中文参数说明_图文

FANUC AC SERVO MOTOR #*s series FANUC AC SPINDLE MOTOR #* series FANUC SERVO AMPLIF IER #* series维修说明书B-65325CM/01·本说明书的任何内容不得以任何方式复制。
·所有参数指标和设计可随时修改,恕不另行通知。
我们试图在本说明书中描述尽可能多的情况。
然而,对于那些不必做的和不可能做的情况,由于存在各种可能性,我们没有描述。
因此,对于那些在说明书中没有特别描述的情况,可以视为“不可能”的情况。
B-65325CM/01为了安全使用为了安全使用为了使您更安全的使用本公司的伺服电机、主轴电机以及伺服放大器(βi SVM βiSVPM,本公司已将相应的注意事项写入“为了安全使用”中。
请在使用电机及放大器之前仔细阅读“为了安全使用”。
另外,有关电机和放大器的各项功能请参阅本篇,请在完全理解的基础上正确使用。
还有,对于“为了安全使用”中没有记录的事项,原则上是禁止操作的。
有关此方面的事项请在操作前预先与本公司进行联系。
目录1.1 警告、注意、注释............................................................................................s-21.2 FANUC AC SERVO MOTOR βi s series,FANUC AC SPINDLE MOTOR βi series.........................................................s-3 1.2.1 警告..................................................................................................s-31.2.2 注意..................................................................................................s-51.2.3 注释..................................................................................................s-61.3 FANUC SERVO AMPLIFIER βi series............................................................s-8 1.3.1 安装时的警告及注意.......................................................................s-81.3.1.1 警告............................................................................................s-81.3.1.2 注意............................................................................................s-91.3.1.3 注释..........................................................................................s-101.3.2 试运行时的警告及注意.................................................................s-111.3.2.1 警告..........................................................................................s-111.3.2.2 注意..........................................................................................s-121.3.3 维护时的警告及注意.....................................................................s-131.3.3.1 警告..........................................................................................s-131.3.3.2 注意..........................................................................................s-141.3.3.3 注释..........................................................................................s-14为了安全使用B-65325CM/01 1.1 警告、注意、注释“为了安全使用”中为了保证操作人员人身安全以及防止机床损坏的有关安全的注意事项,并根据它们在安全方面的重要程度,在正文中以“警告”和“注意”来描述。
变频器与伺服应用习题答案第5章机工

习题P2185.1图1所示为伺服控制系统组成原理图,它包括控制器、伺服驱动器、伺服电机和位置检测反馈元件。
伺服驱动器通过执行控制器的指令来控制伺服电机,进而驱动机械装备的运动部件(这里指的是丝杠工作台),实现对装备的速度、转矩和位置控制。
图1 伺服控制系统组成原理图从自动控制理论的角度来分析,伺服控制系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。
(1)比较环节比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现。
(2)控制器控制器通常是PLC、计算机或PID控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
(3)执行环节执行环节的作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作,这里一般指各种电机、液压、气动伺服机构等。
(4)被控对象机械参数量包括位移、速度、加速度、力、力矩为被控对象。
(5)检测环节检测环节是指能够对输出进行测量并转换成比较环节所需要的量纲的装置,一般包括传感器和转换电路。
5.2交流伺服驱动器中一般都包含有位置回路、速度回路和转矩回路,但使用时可将驱动器、电机和运动控制器结合起来组合成不同的工作模式,以满足不同的应用要求。
伺服驱动器主要有速度控制、转矩控制和位置控制等三种模式。
(1)速度控制模式图2所示的伺服驱动器的速度控制采取跟变频调速一致的方式进行,即通过控制输出电源的频率来对电动机进行调速。
此时,伺服电机工作在速度控制闭环,编码器会将速度信号检测反馈到伺服驱动器,跟设定信号(如多段速、电位器设定等)进行比较,然后进行速度PID控制。
图2 速度控制模式(2)转矩控制模式图3所示的伺服驱动器转矩控制模式是通过外部模拟量输入来控制伺服电机的输出转矩。
图3 转矩控制模式(3)位置控制模式图4所示的驱动器位置控制模式可以接受PLC或定位模块等运动控制器送来的位置指令信号。
伺服电机选型计算(汇川)
LB=
1.8 m
DB=
0.025 m
PB=
0.02 m
MC
0.2 kg
DC
0.06 m
μ=
0.05
L=
1.3 m
η=
0.9
t=
0.65 s
A=
40%
FA=
0N
a=
0°
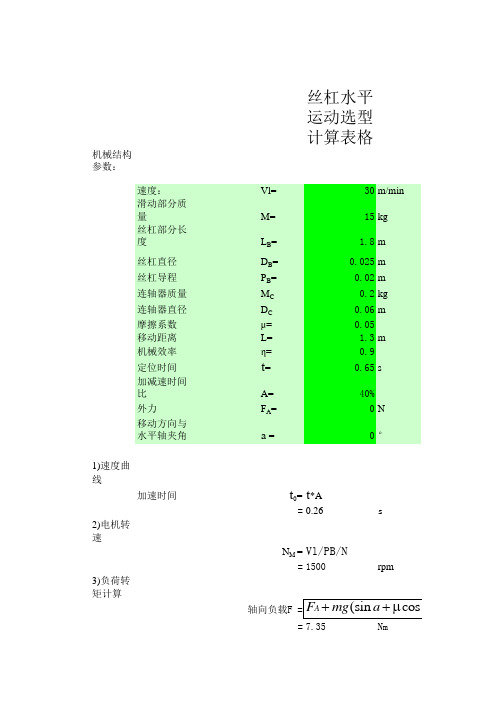
t0= t*A
= 0.26
s
NM = Vl/PB/N
= 1500
rpm
轴向负载F = FFAA+ mg(sin a cos a)
= 7.35
7)负荷与 电机惯量 比
惯量比
8)负荷与 减速机惯 量比 当负荷与 电机惯量 比>5时, 考虑采用 减速装 置,提高 惯量匹配
折算后的惯 量比
I1= 0.715738645
I2= 0.715738645
T=
2.332444717
N=
1500
*
其他常数
*
*
*
丝杠密度
*
*
*
*
* *
*
G=
9.8 m/s
机械结构 参数:
速度: 滑动部分质 量 丝杠部分长 度
丝杠直径 丝杠导程 连轴器质量 连轴器直径 摩擦系数 移动距离 机械效率 定位时间 加减速时间 比 外力 移动方向与 水平轴夹角
1)速度曲 线
加速时间
2)电机转 速
3)负荷转 矩计算
丝杠水平 运动选型 计算表格
Vl=
30 m/m3.1416
ρ=
7900 kg/m3
a cos a)
安全系数
S=
2
电机惯量
JM=
汇川全系列伺服电机说明汇总

高响应交流伺服电机――――3_1 ISMV&ISMH系列高响应交流伺服电机用户手册Ver0.0 深圳市汇川技术股份有限公司前言感谢您使用汇川公司ISMV&ISMH系列高响应交流伺服电机。
该系列交流伺服电机是一种快速响应、精确定位的交流伺服电机。
该产品需要配合伺服驱动器一起组成一套驱动系统,可用于各种需要精确定位、精密控制的场合。
在使用该系列电机之前,请您仔细阅读本使用说明书各项内容,以保证该电机的正确安装、连接、使用和维护。
注意事项♦本使用说明书中的图例仅为了说明,可能会与您订购的产品有所不同。
♦由于产品升级或规格变更,以及为了提高说明书的便利性和准确性,本说明书的内容会及时进行变更。
♦由于损坏或遗失而需要订购使用说明书时,请与本公司各区域代理商联系,或直接与本公司客户服务中心联系。
♦如果您使用中仍有一些使用问题不明,请与本公司客户服务中心联系。
♦客服电话:400-777-12601.1 安全及注意事项a、使用前用500V兆欧表检查电机U、V、W对电机外壳的绝缘电阻,应该不低于2MΩ。
b、使用时应有良好的接地。
c、电机转动时请不要用手触摸电机的轴伸。
d、不要撞击电机,以免造成光电编码器损坏。
e、装机前电机须空载与伺服驱动器联调正常。
1.2 产品使用环境海拔高度:1000米以下环境温度:0℃~40℃相对湿度:20%-80%(不得结露)IP等级:全封闭自冷却IP65、风冷IP54(轴贯通部分除外)电机需要安装在通风良好、且不能够太阳直晒的室内环境1.3 选配件本公司的电机默认都是带油封的,若不需要请在订货中注明,其余配件也请一并注明。
1.4 到货检查收到您订购的产品后,开箱检查以下内容,如有不符请您与订购的代理商或本公司联系。
a、请核对产品的铭牌,确认是否是您订购的产品。
b、检查电机外观有无在运输中损坏。
c、除产品本身以及使用说明书外,确认您所订购的附件是否完整。
1.5 搬运和储存该产品为精密制造产品,搬运以及使用中周转一定要轻拿轻放、防止碰撞,禁止敲击电机或用手提拉电机和光电编码器的引出线,以免造成产品损坏。