A机器人权限设定
Arobotstudio使用详细步骤
A r o b o t s t u d i o使用详细步骤The latest revision on November 22, 2020搬运码垛工作站建模1、创建机器人系统2、创建动态输送链3、创建动态夹具4、工作站逻辑连接5、添加IO(设置好需重启)6、示教目标点(同步到RAPID)7、RAPID编程一、创建机器人系统1、创建空工作站2、导入IRB 260机器人模型3、从布局创建机器人系统,勾选Chinese和709-1网络二、创建动态输送链1、添加输送链并修改位置2、创建600*400*200的物料并修改位置3、添加一个smart组件4、添加source组件5、设置物料本地原点6、添加LINEMOVER和QUEUE组件7设置LINEMOVER属性8、添加面传感器组件9、设置输送链不能被传感器检测10、设置SC_输送链的属性连接11、设置信号连接12、添加信号处理组件,用于检测传感器下降沿13、传感器下降沿触发source进行copy14、传感器与SC输送链的输出联系15、添加仿真开始结束组件,用于激活传感器16、添加置位复位组件,对仿真开始结束信号进行保持17、18、进行仿真设定选择SC——输送链进行验证三、创建动态夹具1、先制作一个吸盘模型,然后设置成工具,并安装到机器人法拉盘2、添加SMART组件3、添加ATTACHER和DETACHER组件4、设置属性5、添加一个线传感器组件6、线传感器设置属性7、设置吸盘工具不能被传感器检测8、把线传感器安装到吸盘(不更新位置,保持当前位置)9、设置属性连接10、添加信号及连接11、添加信号处理取非和锁定组件12、继续信号连接13、添加一个示教物料14、应用手动线性验证SC_工具四、工作站逻辑连接五、参考代码MODULE MainMoudlePERS tooldatatGrip:=[TRUE,[[0,0,200],[1,0,0,0]],[25,[0,,],[1,0,0,0],0,0,0]];!吸盘工具数据PERS loaddata LoadEmpty:=[,[0,0,1],[1,0,0,0],0,0,0];PERS loaddata LoadFull:=[40,[0,0,50],[1,0,0,0],0,0,0];!有效载荷数据PERS robtargetpHome:=[[,,],[,,,],[0,0,1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];!基准点PERS robtargetpActualPos:=[[1620,,],[,,,],[0,0,1,0],[9E+09,9E+09,9E+09,9E+09,9E+09, 9E+09]];!实际点PERS robtargetpPick1:=[[,,],[0,,,0],[0,0,1,0],[9E9,9E9,9E9,9E9,9E9,9E9]];!1路拾取目标点PERS robtargetpPlace1:=[[,,],[0,,,0],[1,0,2,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09 ]];!1路放置基准点PERS robtargetpBase1_0:=[[,,],[0,,,0],[1,0,2,0],[9E9,9E9,9E9,9E9,9E9,9E9]];!1路放置0度姿态PERS robtargetpBase1_90:=[[,,],[0,1,,0],[1,0,3,0],[9E9,9E9,9E9,9E9,9E9,9E9]];!1路放置90度姿态PERS robtarget pPick2:=[[,,],[0,,,0],[-1,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]];PERS robtarget pPlace2:=[[,,],[0,,,0],[-2,0,-1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];PERS robtarget pBase2_0:=[[,,],[0,,,0],[-2,0,-1,0],[9E9,9E9,9E9,9E9,9E9,9E9]];PERS robtarget pBase2_90:=[[,,],[0,1,,0],[-2,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]];PERS speeddata MinSpeed:=[1000,300,5000,1000];PERS speeddata MidSpeed:=[2500,400,5000,1000];PERS speeddata MaxSpeed:=[4000,500,5000,1000];!搬运速度定义PERS bool bPalletFull1:=FALSE;PERS bool bPalletFull2:=FALSE;!逻辑布尔量,拾取后为UE,放置后为FALSEPERS num nCount1:=1;PERS num nCount2:=1;!输送链计数PROC Main()rInitAll;WHILE TRUE DOIF diBoxInPos1=1 AND diPalletInPos1=1 ANDbPalletFull1=FALSE THENrPick1;rPlace1;ENDIFIF diBoxInPos2=1 AND diPalletInPos2=1 ANDbPalletFull2=FALSE THENrPick2;rPlace2;ENDIFWaitTime ;ENDWHILEENDPROCPROC rInitAll()Reset doGrip;pActualPos:=CRobT(\tool:=tGrip);MoveL pActualPos,MinSpeed,fine,tGrip\WObj:=wobj0; MoveJ pHome,MidSpeed,fine,tGrip\WObj:=wobj0;bPalletFull1:=FALSE;nCount1:=1;bPalletFull2:=FALSE;nCount2:=1;ENDPROCPROC rPick1()MoveJ Offs(pPick1,0,0,400),MaxSpeed,z50,tGrip\WObj:=wobj0;MoveL pPick1,MinSpeed,fine,tGrip\WObj:=wobj0;Set doGrip;WaitTime ;GripLoad LoadFull;MoveL Offs(pPick1,0,0,400),MinSpeed,z50,tGrip\WObj:=wobj0; ENDPROCPROC rPick2()MoveJ Offs(pPick2,0,0,400),MaxSpeed,z50,tGrip\WObj:=wobj0; MoveL pPick2,MinSpeed,fine,tGrip\WObj:=wobj0;Set doGrip;WaitTime ;GripLoad LoadFull;MoveL Offs(pPick2,0,0,400),MinSpeed,z50,tGrip\WObj:=wobj0; ENDPROCPROC rPlace1()rPosition1;MoveJ Offs(pPlace1,0,0,400),MidSpeed,z50,tGrip\WObj:=wobj0; MoveL pPlace1,MinSpeed,fine,tGrip\WObj:=wobj0;Reset doGrip;WaitTime ;GripLoad LoadEmpty;MoveL Offs(pPlace1,0,0,400),MidSpeed,z50,tGrip\WObj:=wobj0; MoveJ Offs(pPick1,0,0,400),MaxSpeed,z50,tGrip\WObj:=wobj0; nCount1:=nCount1+1;IF nCount1>20 THENbPalletFull1:=TRUE;ENDIFENDPROCPROC rPlace2()rPosition2;MoveJ Offs(pPlace2,0,0,400),MaxSpeed,z50,tGrip\WObj:=wobj0; MoveL pPlace2,MinSpeed,fine,tGrip\WObj:=wobj0;Reset doGrip;WaitTime ;GripLoad LoadEmpty;MoveL Offs(pPlace2,0,0,400),MidSpeed,z50,tGrip\WObj:=wobj0; MoveJ Offs(pPick2,0,0,400),MaxSpeed,z50,tGrip\WObj:=wobj0; nCount2:=nCount2+1;IF nCount2>20 THENbPalletFull2:=TRUE;ENDIFENDPROCPROC rPosition1()TEST nCount1CASE 1:pPlace1:=Offs(pBase1_0,0,0,0);CASE 2:pPlace1:=Offs(pBase1_0,600+10,0,0);CASE 3:pPlace1:=Offs(pBase1_90,0,400+10,0);CASE 4:pPlace1:=Offs(pBase1_90,400+10,400+10,0); CASE 5:pPlace1:=Offs(pBase1_90,800+20,400+10,0); CASE 6:pPlace1:=Offs(pBase1_0,0,600+10,200);CASE 7:pPlace1:=Offs(pBase1_0,600+10,600+10,200); CASE 8:pPlace1:=Offs(pBase1_90,0,0,200);CASE 9:pPlace1:=Offs(pBase1_90,400+10,0,200);CASE 10:pPlace1:=Offs(pBase1_90,800+20,0,200);CASE 11:pPlace1:=Offs(pBase1_0,0,0,400);CASE 12:pPlace1:=Offs(pBase1_0,600+10,0,400);CASE 13:pPlace1:=Offs(pBase1_90,0,400+10,400);CASE 14:pPlace1:=Offs(pBase1_90,400+10,400+10,400); CASE 15:pPlace1:=Offs(pBase1_90,800+20,400+10,400); CASE 16:pPlace1:=Offs(pBase1_0,0,600+10,600);CASE 17:pPlace1:=Offs(pBase1_0,600+10,600+10,600); CASE 18:pPlace1:=Offs(pBase1_90,0,0,600);CASE 19:pPlace1:=Offs(pBase1_90,400+10,0,600);CASE 20:pPlace1:=Offs(pBase1_90,800+20,0,600);DEFAULT:TPErase;TPWrite "the Counter of line 1 is error,please check it!"; Stop;ENDTESTENDPROCPROC rPosition2()TEST nCount2CASE 1:pPlace2:=Offs(pBase2_0,0,0,0);CASE 2:pPlace2:=Offs(pBase2_0,600+10,0,0);CASE 3:pPlace2:=Offs(pBase2_90,0,400+10,0);CASE 4:pPlace2:=Offs(pBase2_90,400+10,400+10,0);CASE 5:pPlace2:=Offs(pBase2_90,800+20,400+10,0);CASE 6:pPlace2:=Offs(pBase2_0,0,600+10,200);CASE 7:pPlace2:=Offs(pBase2_0,600+10,600+10,200);CASE 8:pPlace2:=Offs(pBase2_90,0,0,200);CASE 9:pPlace2:=Offs(pBase2_90,400+10,0,200);CASE 10:pPlace2:=Offs(pBase2_90,800+20,0,200);CASE 11:pPlace2:=Offs(pBase2_0,0,0,400);CASE 12:pPlace2:=Offs(pBase2_0,600+10,0,400);CASE 13:pPlace2:=Offs(pBase2_90,0,400+10,400);CASE 14:pPlace2:=Offs(pBase2_90,400+10,400+10,400);CASE 15:pPlace2:=Offs(pBase2_90,800+20,400+10,400);CASE 16:pPlace2:=Offs(pBase2_0,0,600+10,600);CASE 17:pPlace2:=Offs(pBase2_0,600+10,600+10,600);CASE 18:pPlace2:=Offs(pBase2_90,0,0,600);CASE 19:pPlace2:=Offs(pBase2_90,400+10,0,600);CASE 20:pPlace2:=Offs(pBase2_90,800+20,0,600);DEFAULT:TPErase;TPWrite "the Counter of line 1 is error,please check it!"; Stop;ENDTESTENDPROCPROC rModify()MoveJ pHome,MinSpeed,fine,tGrip\WObj:=wobj0;MoveJ pPick1,MinSpeed,fine,tGrip\WObj:=wobj0;MoveJ pBase1_0,MinSpeed,fine,tGrip\WObj:=wobj0;MoveJ pBase1_90,MinSpeed,fine,tGrip\WObj:=wobj0;MoveJ pPick2,MinSpeed,fine,tGrip\WObj:=wobj0;MoveJ pBase2_0,MinSpeed,fine,tGrip\WObj:=wobj0;MoveJ pBase2_90,MinSpeed,fine,tGrip\WObj:=wobj0;ENDPROCENDMODULE。
ABB机器人【配置设定】大全,人手一份,建议永久收藏!

ABB机器⼈【配置设定】⼤全,⼈⼿⼀份,建议永久收藏!功能介绍指南车机器⼈致⼒于⼯业机器⼈⾃动化应⽤服务,专注⼯业机器⼈应⽤⼯程师(电⽓设计与调试、机械设计、技术营销、离线仿真、视觉、项⽬⽅案、⾼级编程)等培训,与机友们分享技术⼲货及⾏业动态。
本公众号由杭州指南车机器⼈科技有限公司维护运营!限时下载|ABB、FANUC机器⼈的全套学习资料1⼀、如何配置ABB机器⼈Profinet从站1、机器⼈需要有888-2或者888-3选项(使⽤控制器⽹⼝),或者840-3选项(使⽤Anybus⽹⼝)2、此处举例888选项3、机器⼈控制器有如下⽹⼝,其中:X2 是服务端⼝,ip固定192.168.125.1X3连接了⽰教器X7连接了安全板X9连接了轴计算机4、Profinet可以连接WAN⼝或者LAN3⼝,根据设置连接5、此处举例连接WAN⼝6、控制⾯板,配置,主题选择communication8、点击ProfinetNetwork9、修改ip并选择对应⽹⼝10、重启11、控制⾯板,配置,主题I/O ,PROFINET InternalDevice12、配置输⼊输出字节数。
和PLC那边设置⼀致13、配置界⾯下,进⼊Industry Network,PROFINET14、设置station名字,这个名字要和PLC端对机器⼈的station设置⼀样15、添加signal,device选择profinetInternal device2⼆、ABB机器⼈IO接线与配置1、以DSQC652为例(16进16出)2、上部区域为输出16个点,其中9和10针脚的0v,24v需要从柜门旁边的XT31引过来3、下部区域为16个输⼊点,9号针脚的0v需要从XT31引过来4、左侧区域短接⽚为地址位,默认为10,如下图(剪掉的为1,留下的是0,⾼电平有效)。
如果要修改板卡地址,在这⾥修改,机器⼈⾥也要做对应配置5、6、控制⾯板,配置,找到devicenetdevice,添加(如果已经显⽰添加,则不需要再添加)7、模板选择652,地址根据前⾯短接⽚设置,默认为108、确定后,暂时不重启,全部配置完再⼀起重启9、进⼊Signal,点击添加10、举例,⼀个输出设置如下设置name,type选择digital output,assigneddevice选择刚配置好的板卡,设置mapping。
ABB机器人权限设定
ABB权限设定【ABB权限设定】1.目的和范围本文档旨在详细介绍ABB权限设定的流程和步骤。
权限设定是为了确保系统的安全性和操作的合规性。
本文档适用于所有与ABB权限设定相关的人员。
2.定义- ABB:指由ABB公司生产和销售的。
- 权限设定:指对ABB进行权限控制和管理的过程。
- 操作员:指被授权进行操作的人员。
- 管理员:指具有系统管理权限的人员。
3.权限设定流程3.1 确定权限级别按照需求和安全要求,确定不同操作人员的权限级别,如操作员、管理员等。
3.2 创建用户账户根据权限级别创建相应的用户账户,在用户账户中记录相关信息,例如姓名、工号等。
3.3 分配权限将不同操作人员的权限分配给相应的用户账户,确保操作人员仅能进行其权限范围内的操作。
3.4 验证权限在权限设定完成后,进行权限验证,确保权限设定的准确性和有效性。
3.5 更新和维护权限随着工作需求和人员变动,及时更新和维护权限,确保权限设定与实际情况一致。
4.权限级别说明4.1 操作员权限- 启动和停止运行。
- 执行预设的程序。
- 针对运行过程中的异常情况进行简单处理。
4.2 管理员权限- 具有操作员权限的所有功能。
- 创建、编辑和删除程序。
- 调整运行参数。
- 进行系统的维护和监控。
- 备份和恢复系统。
5.附件本文档涉及的附件包括:- 用户账户表格:记录用户账户的相关信息。
- 权限验证记录表格:记录权限验证的结果和时间。
6.法律名词及注释- 权限控制:指对特定资源进行授权和管理的过程,以确保合法和合规的资源访问。
- 合规性:指符合法律法规、行业标准和规范要求的状态。
- 安全性:指系统能够抵御未经授权的访问、破坏或泄露等安全威胁的能力。
fanuc机器人调试标准化作业指导书水印版
发那科机器人调试标准化作业指导书:一零点校正�机器人本体零点校正a)在机器人编码器没有断过电的情况下,输入出厂时校准后的脉冲值,校正数据储存在系统变量$DMR_GRP.$MASTER_COUN中,操作步骤如下:�通过MENUS(画面选择)选择SYSTEM(系统)�在画面切换菜单上选择Variabies(系统变量)。
�选择$DMR_GRP。
�选择$MASTER_COUN。
�输入出厂时的脉冲值。
�按下PREV(返回)至上一个画面.�将$MASTER_COUN设定为TRUE.�选择CALIBRATE,按下YES.�按下DONE(结束)b)编码器断过电的情况下(如电池耗尽,编码器线断开),操作步骤如下。
�通过MENUS(画面选择)选择SYSTEM(系统)。
�将$MASTER_ENB等于1或者2。
.�按下[TYPE]。
�选择Master/Ca1。
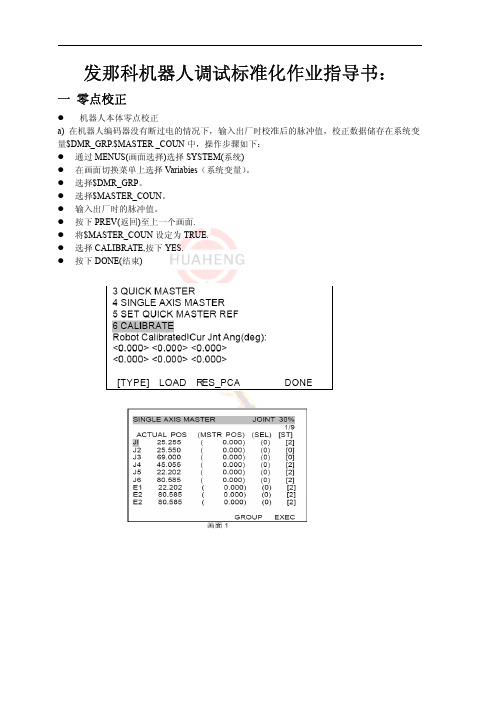
�选择SINGLE AXIS MASTER见图(画面1)�在JOG方式下将机器人移动到零点位置。
�将需要校正的那一个轴的(SEL)改为1.�见图(画面2)�按下EXEC(执行)见图(画面3)�按下PREV(返回)至上一个画面。
�选择CALIBRATE,按下YES.�按下DONE(结束)�机器人外部轴校正校正a)通过MENUS(画面选择)选择SYSTEM(系统)。
b)将$MASTER_ENB等于1或者2。
.c)按下[TYPE]。
d)选择Master/Ca1。
e)选择SINGLE AXIS MASTERf)在JOG方式下将机器人移动到零点位置。
g)将需要校正的那一个轴的(SEL)改为1.h)按下EXEC(执行)i)按下PREV(返回)至上一个画面。
j)选择CALIBRATE,按下YES.k)按下DONE(结束)二检差设置的减速比�直线轴减速比检查将工具TCP点对准设备上TCP点,用笛卡儿坐标系,同方向正负移动外部轴,移动距离不小于800mm,检查工具TCP点和设备上TCP点的位置偏差应小于等于±0.1,如果大于±0.1则减速比不正确,请看图纸重新设定。
fanuc机器人使用三点示教法设置用户坐标系的具体步骤

fanuc机器人使用三点示教法设置用户坐标系的具体步骤1.引言1.1 概述概述部分的内容:在现代工业生产中,自动化技术的应用已经成为提高生产效率和质量的重要手段。
FANUC机器人作为自动化领域的重要装备,被广泛应用于各种制造环境中,为企业带来了巨大的效益。
设置用户坐标系是FANUC机器人编程和操作中非常重要的一项任务。
用户坐标系是机器人在工作空间中进行规划和控制时的基准坐标系,通过设置和使用适当的用户坐标系,可以有效地对机器人进行定位和操作。
本文将介绍FANUC机器人使用三点示教法设置用户坐标系的具体步骤。
三点示教法是一种常用的设置用户坐标系的方法,通过确定机器人末端执行器在三个不同位置时的坐标值,从而确定用户坐标系的原点和方向。
在接下来的章节中,我们将详细介绍三点示教法的概述以及设置用户坐标系的步骤。
通过深入了解和理解这些内容,读者将能够正确地进行用户坐标系的设置,并更好地应用FANUC机器人进行工作任务的规划和操作。
同时,本文的结论部分将对所介绍的内容进行总结,并展望未来在FANUC机器人设置用户坐标系方面的发展趋势。
希望通过本文的阅读,读者们能够对FANUC机器人的用户坐标系设置有更深入的了解,进一步提升自己在自动化领域的专业技能和实践能力。
1.2文章结构1.2 文章结构本文将介绍关于使用三点示教法来设置用户坐标系的具体步骤。
文章主要分为引言、正文和结论三个部分。
在引言部分,将对本文的概述进行说明,简要介绍三点示教法的背景和作用。
同时,还会讨论文章的目的,即解释为什么需要使用三点示教法来设置用户坐标系。
在正文部分,首先会对三点示教法进行概述,详细解释其原理和应用场景。
然后,将逐步介绍设置用户坐标系的具体步骤。
这些步骤将包括从机器人示教器上选择示教点的方法,将示教点与基准坐标系相对应的过程,以及最终确认用户坐标系的操作过程。
每个步骤都将详细说明,并提供相应的代码示例和图表辅助说明,使读者能够清晰地理解和操作。
ABB机器人权限设定
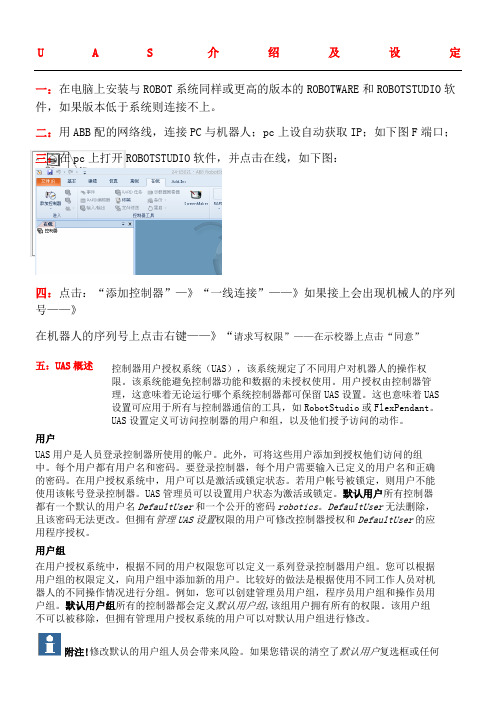
U A S介绍及设定一:在电脑上安装与ROBOT系统同样或更高的版本的ROBOTWARE和ROBOTSTUDIO软件,如果版本低于系统则连接不上。
二:用ABB配的网络线,连接PC与机器人;pc上设自动获取IP;如下图F端口;三:在pc上打开ROBOTSTUDIO软件,并点击在线,如下图:四:点击:“添加控制器”—》“一线连接”——》如果接上会出现机械人的序列号——》在机器人的序列号上点击右键——》“请求写权限”——在示校器上点击“同意”五:UAS概述控制器用户授权系统(UAS),该系统规定了不同用户对机器人的操作权限。
该系统能避免控制器功能和数据的未授权使用。
用户授权由控制器管理,这意味着无论运行哪个系统控制器都可保留UAS设置。
这也意味着UAS设置可应用于所有与控制器通信的工具,如RobotStudio或FlexPendant。
UAS设置定义可访问控制器的用户和组,以及他们授予访问的动作。
用户UAS用户是人员登录控制器所使用的帐户。
此外,可将这些用户添加到授权他们访问的组中。
每个用户都有用户名和密码。
要登录控制器,每个用户需要输入已定义的用户名和正确的密码。
在用户授权系统中,用户可以是激活或锁定状态。
若用户帐号被锁定,则用户不能使用该帐号登录控制器。
UAS管理员可以设置用户状态为激活或锁定。
默认用户所有控制器都有一个默认的用户名DefaultUser和一个公开的密码robotics。
DefaultUser无法删除,且该密码无法更改。
但拥有管理UAS设置权限的用户可修改控制器授权和DefaultUser的应用程序授权。
用户组在用户授权系统中,根据不同的用户权限您可以定义一系列登录控制器用户组。
您可以根据用户组的权限定义,向用户组中添加新的用户。
比较好的做法是根据使用不同工作人员对机器人的不同操作情况进行分组。
例如,您可以创建管理员用户组,程序员用户组和操作员用户组。
默认用户组所有的控制器都会定义默认用户组,该组用户拥有所有的权限。
六轴机器人操作手册
V A L I R O B O T六轴机器人使用手册客户:版本:1.0版日期:2013-1-1瓦力智能科技V a l i I n t e l l i g e n t T e c h n o l o g yC o r p o r a t i o n操作前,请注意安全。
确认人员与周边设备都在工作范围外。
内容若有错误,请以原厂操作说明书为准!目录第一章安全 (1)1.1 保障安全 (1)1.2 专门培训 (3)1.3 操作人员安全注意事项 (3)1.4 机器人的安全注意事项 (5)1.5 移动及转让机器人的注意事项 (7)1.6 废弃机器人的注意事项 (7)第二章机器人菜单详解 (8)2.1 六轴机器人系统介绍 (8)2.2 系统运行环境 (9)2.3 程序菜单介绍 (9)2.4 数据菜单介绍 (11)2.5 机器人菜单介绍 (12)2.6 显示菜单介绍 (14)第三章手动操作机器人 (17)第四章机器人编程教导 (26)4.1 建立新程序 (26)4.2 常用编程指令介绍 (30)第五章机器人的保养 (42)5.1 机械手的保养 (42)5.2 控制柜的保养 (43)第一章安全安全在生产中是最重要的,无论是自身的安全,还是他人及设备的安全都很重要,所以在这里我们把安全放在首位首先我们来介绍一下在生产操作中应注意哪些安全问题,应该怎么解决。
1.1 保障安全机器人与其他机械设备的要求通常不同, 如它的大运动范围、快速的操作、手臂的快速运动等,这些都会造成安全隐患。
阅读和理解使用说明书及相关的文件,并遵循各种规程,以免造成人身伤害或设备事故。
用户有责任保证其安全的操作环境符合和遵守地方及国家有关安全性的法令、法规及条例。
上图为安全注意事项:危险,误操作时有危险可能发生死亡或重伤害事故。
注意,可能发生中等伤害或轻伤事故。
强制,必须遵守的事项。
禁止,禁止的事项。
1.2 专门培训• 示教和维护机器人的人员必须事先经过培训。
微信群自动踢人机器人,自动踢发广告的是怎么设置的?
微信群⾃动踢⼈机器⼈,⾃动踢发⼴告的是怎么设置的?
微信群如何才能维护的更好?⾸先得避免它成为⼀个⼴告群,作为群主应该明令禁⽌群⾥有发
⼴告或发其他与群主题内容⽆关的链接,做好群内价值输出,才能保障群活性,减少退群率。
但总有那么⼀些⼈会⽆视群规的存在,依旧会在群内发⼴告,对于这种情况我们可以专门“请”⼀
个机器⼈来帮我们做好群秩序维护⼯作。
微信群⾃动踢⼈机器⼈,可以设置群内的踢⼴告规则,⽆论是发图⽚、语⾳,还是链接、视频
等内容形式都可以判定为⼴告内容,机器⼈会⾃动做出警告或者踢除措施。
⾃动踢⼈规则设置⽅法:
1. 进⼊功能中⼼。
2. 点击⼴告踢⼈功能,设置踢⼈规则。
包括踢⼈关键词,踢⼴告内容形式,⽐如踢发图⽚,名
⽚,⼩视频,⼩程序,⽂章,⽂件,同时还可以设置⽩名单辅助踢⼈,以及踢⼈并加⼊⿊名
单。
3. 设置踢⼈⼴播语。
通常在踢⼈规则设置时可以填写允许次数,允许次数为0则触发规则就踢
⼈,允许次数⼤于0,在24h内触发到该次数机器⼈会⾃动踢⼈,如没有触发到允许次数的情况
下会做出警告。
4. 设置完成,规则⽣效。
最后,需要注意的⼀点是,只有群主才有权限设置踢⼈规则哦,但在聊天狗⼴告踢⼈规则设置
时,可以设置⽩名单成员来进⾏辅助踢⼈,以便于更好的提⾼群管理效率和质量。
AIR6L-A工业机器人系统快速入门手册前言
II
PEB 使用说明书
目录
目录
前言 ............................................................................................................................................................................. I
5.2.1 通过 ARL 程序查看 DO 信号................................................................................................................................................ 19 5.2.2 通过 IO 窗口查看 DO 信号................................................................................................................................................... 20
符号约定文档相关符号约定见 4。表 4 符号约定
格式
意义
<> 【】
ABB原点设定
ABB原点设定原点设定是ABB机器人系统中的一个重要步骤,它确保机器人在工作区域中准确地回到初始位置。
在进行原点设定之前,需要确保机器人和工作区域都没有障碍物,以避免可能的损坏。
以下是进行ABB原点设定的步骤:1. 打开ABB机器人系统并登录到控制台。
确保机器人系统的电源已经打开,并且控制台连接正常。
2. 在控制台上选择"原点设定"功能。
这通常可以在菜单选项或快捷键中找到。
3. 进入原点设定模式后,会有一系列的提示指导您完成原点设定过程。
按照这些提示进行操作,并在需要时确认您的选择。
通常,您需要确认机器人的初始位置、工作区域的边界和任何其他特定要求。
4. 跟随指导进行机器人的轴向移动。
在移动过程中,系统会记录机器人轴向的位置和运动。
5. 当移动到规定的位置后,确认并保存机器人的原点设定。
这将成为机器人以后回到的初始位置。
6. 完成原点设定后,系统会提供一个报告或确认信息,指示原点设定已成功完成。
请记住,进行ABB原点设定时,确保仔细遵循系统的指示,并确保所有步骤均按要求完成。
此外,在原点设定之后,您可以验证机器人是否成功回到了初始位置。
原点设定是确保机器人在工作期间保持准确和可靠性的重要步骤。
通过正确进行原点设定,您可以提高机器人的运行效率,并确保其在工作区域内安全运行。
请定期检查和重新设定机器人的原点,以确保其持续的准确性。
以上是ABB原点设定的一般步骤,具体步骤可能会因机器人型号和系统版本而有所不同。
请参考相关文档或咨询ABB技术支持以获取更详细的指导。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
UAS介绍及设定一:在电脑上安装与ROBOT系统同样或更高的版本的ROBOT WARE 和 ROBOTSTUDIO软件,如果版本低于系统则连接不上。
二:用ABB配的网络线,连接PC 与机器人;pc上设自动获取IP;如下图F端口;三:在pc上打开ROBOTSTUDIO软件,并点击在线,如下图:四:点击:“添加控制器”—》“一线连接”——》如果接上会出现机械人的序列号——》在机器人的序列号上点击右键——》“请求写权限”——在示校器上点击“同意”五:UAS概述控制器用户授权系统(UAS),该系统规定了不同用户对机器人的操作权限。
该系统能避免控制器功能和数据的未授权使用。
用户授权由控制器管理,这意味着无论运行哪个系统控制器都可保留 UAS 设置。
这也意味着 UAS 设置可应用于所有与控制器通信的工具,如 RobotStudio 或 FlexPendant。
UAS 设置定义可访问控制器的用户和组,以及他们授予访问的动作。
用户UAS 用户是人员登录控制器所使用的帐户。
此外,可将这些用户添加到授权他们访问的组中。
每个用户都有用户名和密码。
要登录控制器,每个用户需要输入已定义的用户名和正确的密码。
在用户授权系统中,用户可以是激活或锁定状态。
若用户帐号被锁定,则用户不能使用该帐号登录控制器。
UAS管理员可以设置用户状态为激活或锁定。
默认用户所有控制器都有一个默认的用户名Default User和一个公开的密码robotics。
Default User无法删除,且该密码无法更改。
但拥有管理 UAS 设置权限的用户可修改控制器授权和Default User的应用程序授权。
用户组在用户授权系统中,根据不同的用户权限您可以定义一系列登录控制器用户组。
您可以根据用户组的权限定义,向用户组中添加新的用户。
比较好的做法是根据使用不同工作人员对机器人的不同操作情况进行分组。
例如,您可以创建管理员用户组,程序员用户组和操作员用户组。
默认用户组所有的控制器都会定义默认用户组,该组用户拥有所有的权限。
该用户组不可以被移除,但拥有管理用户授权系统的用户可以对默认用户组进行修改。
附注!修改默认的用户组人员会带来风险。
如果您错误的清空了默认用户复选框或任何默认组权限,系统将会显示提示警告信息。
请确保至少一位用户被定义为拥有管理用户授权系统设置权限。
如果默认用户组或其他任何用户组都没有该权限,您将不能管理和控制用户和用户组。
权限权限是对用户可执行的操作和可获得数据的许可。
您可以定义拥有不同权限的用户组,然后向相应的用户组内添加用户帐号。
权限可以是控制器权限或应用程序权限。
根据您要执行的操作,您可能需要多个权限。
详细操作过程请参阅 .控制器权限控制器权限对机器人控制器有效,并适用于所有访问控制器的工具和设备。
应用程序权限针对某个特殊应用程序您可以定义应用程序权限,例如示教器,仅在使用该应用程序时有效。
应用程序权限可以使用附加选项添加,也可以针对用户定义的应用程序进行定义。
六:在“在线”选项卡上,”用户管理”并选择编辑用户帐号来管理用户帐号,权限和用户组.用户选项卡使用用户选项卡您可以设定可以登录控制器的用户,以及每个用户应该属于哪个用户组.用户选项卡部件1.添加按钮。
打开添加用户对话框。
2.编辑按钮。
打开对话框修改用户登录名和密码.3.删除按钮。
从控制器中删除所选的用户帐号.4.当前控制器用户列表。
显示了在当前控制上定义的用户列表。
该列表包含两列::列描述用户帐号名称用户状态显示该帐号激活还是锁定状态。
如果是锁定状态,则不能使用该帐号登录控制器.5.激活/锁定选项框。
改变用户状态。
6.用户组/用户权限列表. 用户组列表显示了用户帐号所属的用户组。
要修改用户组包含的用户,选中或清空组名前的复选框。
用户权限列表显示了所选用户组的可用权限。
当在用户权限列表中选择了项目之后,将显示关于所选权限的描述。
如下图:添加用户1.在用户选项卡上,单击添加打开对话框。
2.在用户名称框中,输入用户名称。
仅能使用ISO8859-1(Latin 1)字符,且不超过16个字符。
3.在密码框中,输入用户密码。
您所输入的密码将不可见。
仅能使用ISO8859-1(Latin 1)字符,且不超过16个字符。
4.在重新输入密码框中,重新输入用户密码。
5.单击确定添加新用户并关闭对话框.6.单击OK。
删除用户1.在用户选项卡上,在当前控制器用户列表中选择要删除的用户并单击删除.2.当提示您确定要删除所选用户吗?时,单击是。
3.单击OK。
设定用户组成员1.在用户选项卡上,在当前控制器用户列表中选择所需用户.2.在用户组列表中,选择该组包含的用户.3.单击OK。
改变用户名和密码1.在用户选项卡上,在当前控制器用户列表中选择要编辑的用户,单击编辑用户.打开编辑对话框.2.要修改用户名,在用户名称框中输入新用户名。
仅能使用ISO8859-1(Latin 1)字符,且不超过16个字符。
3.要修改密码,在密码框中输入新密码,然后在重新输入密码框中重新输入新密码。
仅能使用ISO8859-1(Latin 1)字符,且不超过16个字符。
4.单击确定保存对用户的修改并关闭对话框.5.单击OK。
激活或锁定用户1.在用户选项卡上,在当前控制器用户列表中选择一个用户,单击它的状态描述(激活或锁定),将显示一个项目框,在这个项目框上您可以选择更改用户状态.用户的新状态将显示在当前控制器用户列表的状态列中.2.单击OK。
导出用户列表1.在用户选项卡上,在当前控制器用户列表中选择选择您所需的用户,单击导出.将打开另存为对话框,请在对话框中输入名称和地址保存包含有用户列表信息的文件.导入用户列表1.在用户选项卡上,在当前控制器用户列表中选择用户,然后单击导入.将打开打开文件对话框,请在对话框中查找您要导入文件所在的地址.描述当您选中要导入的文件,将出现导入选项表格. 选择之前的用户和用户组将被删除.导入前删除已存在的用户和用户组高级选项将出现新对话框。
导入用户但不删除拷贝已存在的用户不会被替代。
导入用户并删除拷贝表示已存在的用户将被替代.导入用户组但不删除拷贝已存在的用户组不会被替代.导入用户组并删除拷贝表示已存在的用户组将被替代.2.添加用户组1.在用户组选项卡上,单击添加.将打开添加新用户组对话框.2.在用户组名称框,输入组名。
仅能使用ISO8859-1(Latin1)字符,且不超过16个字符。
3.单击确定添加新的用户组并关闭对话框.4.单击OK。
重命名用户组1.在用户组选项卡上,在当前控制器用户组列表中选择要重命名的用户组,单击重命名.将打开重命名用户组对话框.2.在用户组名称框,输入组名。
仅能使用ISO8859-1(Latin1)字符,且不超过16个字符。
3.单击确定重命名用户组并关闭对话框.4.系统将提示您是否同时保留原用户组和组内的用户和新用户组以及新用户组内的用户(与原用户组用户相同)。
用于单击是用户同时属于新名称用户组和原用户组。
但是,由于原用户组已被新名称的用户组替换,在控制器用户授权系统中将没有原用户组的定义。
此操作在您要重新创建原用户组或将用户设置复制至另一使用原用户组定义的控制器时非常有用.否删除原用户组中的用户。
此操作仅将原用户组内的名称替换为新名称.取取消更改,保持原有用户组名称和组中的用户不变.消5.单击OK。
删除用户组1.在用户组选项卡,选中要从当前控制器用户组列表中删除的用户组,单击删除.2.系统将提示您当前用户组内的原有用户是否还属于当前用户组(即使当前用户组不合法)。
用于单击是用户组内的用户仍属于该组,即便在控制器用户授权系统中已经没有该用户组的定义。
此操作在您要重新创建原用户组或将用户设置复制至另一使用原用户组定义的控制器时非常有用.否删除该用户组内的用户.取消更改,保持原用户组和组内用户不变.取消3.单击OK。
授予用户组权限1.在用户组选项卡上,在当前控制器用户组列表中选择所需的用户组.2.在控制器授权/应用程序授权列表中,选择该用户组所需的授权.3.单击OK。
七:用户权限管理查看器概述用户权限管理查看器页面显示当前登录控制器用户的权限信息和其所属的用户组。
1.在验证菜单中,单击用户权限管理系统查看器。
将打开用户权限窗口常用操作示例操作所需权限重命名控制器(需要重启控制器)Modify controller propertiesRemote warm start修改系统参数并加载配置文件Modify configurationRemote warm start安装新系统Administration of installedsystem执行备份(需要重启控制器)Backup and saveRemote warm startRestore a backup (需要重启控制器)Restore a backupRemote warm start下载/删除模块Load program创建新模块. Load program编辑RAPID模块代码 Edit RAPID code将模块和程序保存至磁盘Backup and save在任务窗口开始执行程序Execute program创建新的I/O信号,即添加信号类型实例(需要重启控制器)Modify configurationRemote warm start设置I/O信号的值I/O write access由文件传送窗口访问Read access to controller控制器磁盘disksWrite access tocontroller disks控制器权限Full access 该权限包含了所有控制器权限,也包含将来RobotWare版本添加的权限。
本权限不包含应用程序权限和安全配置权限权限。
Manage UAS settings 该权限可以读写用户授权系统的配置文件,即可以读取,添加,删除和修改用户授权系统中定义的用户和用户组.Execute program 拥有执行以下操作的权限:•开始/停止程序(使用拥有停止程序的权限)•将程序指针指向主程序•执行服务程序Perform ModPosand HotEdit拥有执行以下操作的权限:•修改和示教RAPID代码中的位置信息(ModPos)•在执行的过程中修改RAPID代码中的单个点或路径中的位置信息。
•将ModPos/HotEdit位置值复位为原始值•修改RAPID变量的当前值Modify current value 拥有修改RAPID变量的当前值。
该权限是Perform ModPos and HotEdit 权限的子集.I/O writeaccess拥有执行以下操作的权限::•设置 I/O信号值•设置信号仿真或不允许信号仿真•将I/O总线和单元设置为启用或停用Backup and save 拥有执行备份和保存模块,程序和配置文件的权限.Restore abackup拥有恢复备份并执行B-启动的权限.Modify configuration 拥有修改配置数据库,即加载配置文件,更改系统参数值和添加删除实例的权限.Load program 拥有下载/删除模块和数据的权限.Remote warm start 拥有远程关机和热启动的权限。