Z1 配置福尼斯焊机的机器人系统参数设置说明
福尼斯电焊机安全操作及保养规程

福尼斯电焊机安全操作及保养规程1. 前言在使用福尼斯电焊机时,安全操作是至关重要的。
正确的使用方法和及时的维护保养,可以最大程度地确保您的安全和设备的正常运行。
本文将介绍福尼斯电焊机的安全操作规程以及保养维护规程,帮助您更好地使用设备。
2. 安全操作规程2.1 保持设备清洁保持设备清洁和干燥是很重要的。
使用前要仔细检查设备外壳是否有损坏或有裂纹、缺口等情况。
电焊机受损可能导致电击、火灾等危险。
如果设备外壳已经损坏,请不要使用设备,应当及时联系厂家或维修人员进行修理。
2.2 穿戴防护装备在使用电焊机时,需要穿戴适当的防护装备,包括焊接面罩、耳塞、手套、工作服等等,确保自身安全。
焊接工作时,很容易散发出的有害气体,应该使用适当的通风设备通风。
2.3 焊接前检查工作在开启电焊机之前,需要对设备及周边环境进行检查,必须确保遵循以下步骤:•检查设备安装是否正确,电源插头和电源电压是否符合要求。
•检查电焊机是否处于正常状态,功能是否正常。
•确保工作环境有足够的光,以便焊接工作能够进行。
•检查工件是否处于固定状态。
•检查地线是否连接好。
2.4 避免过载过载是电焊机常见的问题,必须遵循以下规则:•确保使用的设备符合电焊机的功率要求。
•不要长时间(超过10分钟)进行高功率的焊接。
•焊接过程中,避免电焊机超载,以避免危险的可能性。
2.5 关闭焊接设备在完成工作时,需要关闭电焊机。
在关机时,请注意以下事项:•确保所有电源插头已关闭并拔出。
•清洁电焊机,清除焊渣及其他碎屑。
•储存电焊机及其他工具用品在安全、干燥、通风的地方。
3. 保养维护规程3.1 清洁电焊机清洁设备是很重要的,它可以减少设备故障率,提高电焊焊接质量。
应周期性地将设备和周边环境进行清洁。
在清洁过程中,禁止水和清洁剂进入设备内部。
3.2 更换摩擦片摩擦片是电焊机的重要部件之一。
在设备长时间使用的情况下,摩擦片会磨损或破损。
因此,应该在破损或磨损的时候及时更换。
福尼斯双机焊接功能设置1

• 检查机器人系统版本是DS1.40.00(XX)-00以前 还是以后版本 • 如果为DS1.40.00(XX)-00以后(包含此版本), 则不用升级 • 如果为DS1.40.00(XX)-00以前版本则需更新到 DS1.40.00(XX)-00以后版本 • 系统升级[连锁]+【8】+【选择】YASKAWAFra bibliotekYASKAWA
Robotics Division 5
MOTOMAN
软件设置
YASKAWA
Robotics Division 6
软件设置
MOTOMAN
1、检查I/O单元确认YEW基板已经拆除
• 1、进入维护模式 • 2.系统----设置----I/O单元(按ENTER检查是否有 YEW基板)
YASKAWA
Robotics Division 7
软件设置
MOTOMAN
2、设置网络选项功能
• 1、进入维护模式 • 2.系统----设置----OPTION FUNCTION • ----网络选项的 “细节”
YASKAWA
Robotics Division 8
软件设置
MOTOMAN
• 4.“设备” 更改为使用“ETHERNET” • 5.选择“细节”设置网络IP
Robotics Division 3
硬件配置
MOTOMAN
• 1.两机器人做好双机协调 • 2.两焊机(带网络通信基板)安装到位 • 3.拆除两个机器人电气柜YEW 基板
YASKAWA
Robotics Division 4
硬件配置
MOTOMAN
• 4.YCP LAN0 网线口连接HUB ,由HUB分出两 根网线连接福尼斯WELDER1 WELDER2.
福尼斯焊机操作培训_初级篇

按下急停后出现,一般伴随SRVO-007 (措施)如图 复位F4 1CH 后 选择复位单通道异常, 然后在按RESET
Fronius等离子系统 珠海福尼斯 4/20084/2008
简单故障报警排除
焊机显示no|H2O
表示无水,快速关闭大小弧,防止烧枪。 检查水箱及水循环是否工作正常 检查需不需添加冷却水 最后消报警
初级篇
Fronius等离子系统 珠海福尼斯 4/20084/2008
等离子焊接示意图
冷却水
等离子气
焊接电源
高频 发生 器
保护气
等离子 电源
焊机电 源
钨针
火嘴
Fronius等离子系统 珠海福尼斯 4/20084/2008
PLASMA设备
焊机 TransTig 2200 Job 等离子发生器 PlasmaModule 10 水箱 FK4000R 焊枪 PTW1500 送丝系统(选配) KD 1500 D-11 KD Supply
Fronius等离子系统 珠海福尼斯 4/20084/2008
机械手TP示教盒屏幕
状态信号 指示灯 正在被执行的程序 警告报警消息 当前坐标系
示教速度
正在编辑 的程序 行号 程序结束 标志 提示消息 当前行/总行
运行状态
当前模式 当前运行行号 功能键菜单
Fronius等离子系统 珠海福尼斯 4/20084/2008
存储键
调节旋钮
测气键
模式选择键
Fronius等离子系统 珠海福尼斯 4/20084/2008
控制面板——PlasmaModule 10
存储键
调节旋钮
测气键
起弧键
TPS(奥地利福尼斯)焊机使用说明书
由于监控系统对实际焊接参数与设定参数进行数字 式的比较并及时调整,因而这种焊机创造了迄今为 止独一无二的、无可比拟的精确度,无与伦比的焊 接质量,并具最佳的焊接特性。
机器原理
这种新型机器的的典型特性是具有巨大的适应性 能,极其容易地胜任各种各样的任务。这些受欢迎 的特性不但在标准化组件设计上能看到,而且在系 统提供的错误自检,扩展功能上也能体现。
MIG/MAG 焊-------------------------29
暂停引弧功能 断弧监测功能 手工模式 无飞溅引弧 双脉冲 专为机器人设计的特殊 2 步模式
手工电弧焊----------------------------------32
热起弧功能 恒能特征曲线 焊条防粘功能
TIG 焊---------------------------------34
TIG 焊软收弧功能
JOB 工作方式-------------------------------35
在工作序号中存储焊接程序 复制/覆盖工作 删除工作 调用 JOB 中的焊接程序 在 JOBMASTER 焊枪切换工作程序 枪开关选项 JOB(工作调整功能)
第一层设置菜单-------------------------------41
2 步模式 4 步模式 焊铝特殊程序 点焊 控 制 和 连 接 -------------------------------------11 TPS 2700 电源 TS 4000/5000&TPS 4000/5000 电源 VR 4000/ VR 4000C/ VR 4000CI 送丝机 VR 7000/ VR 7000CI 送丝机 VR2000 送丝机 FK 4000/4000 R 水冷系统 JobMaster 焊枪 TR 2000 遥控器 TR 4000 遥控器 TP 08 遥控器 RCU4000 遥控器 RCU 4000 遥控器 内部网络分配器 内部网络
Z1 配置福尼斯焊机的机器人系统参数设置说明
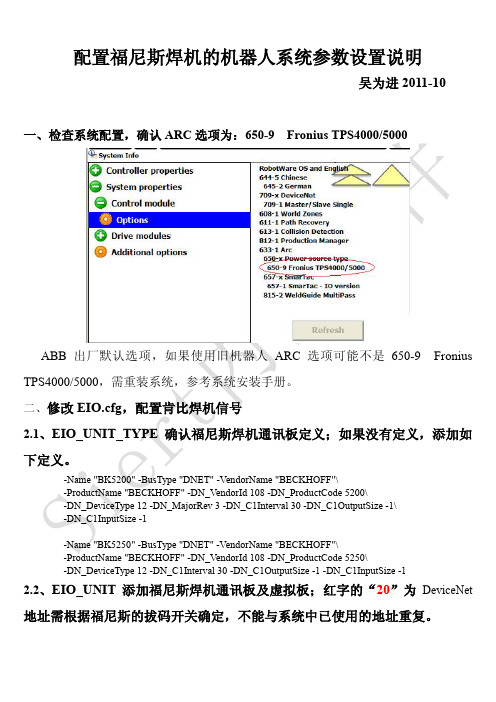
配置福尼斯焊机的机器人系统参数设置说明吴为进2011-10 一、检查系统配置,确认ARC选项为:650-9 Fronius TPS4000/5000ABB出厂默认选项,如果使用旧机器人ARC选项可能不是650-9 Fronius TPS4000/5000,需重装系统,参考系统安装手册。
二、修改EIO.cfg,配置肯比焊机信号2.1、EIO_UNIT_TYPE确认福尼斯焊机通讯板定义;如果没有定义,添加如下定义。
-Name "BK5200" -BusType "DNET" -VendorName "BECKHOFF"\-ProductName "BECKHOFF" -DN_VendorId 108 -DN_ProductCode 5200\-DN_DeviceType 12 -DN_MajorRev 3 -DN_C1Interval 30 -DN_C1OutputSize -1\-DN_C1InputSize -1-Name "BK5250" -BusType "DNET" -VendorName "BECKHOFF"\-ProductName "BECKHOFF" -DN_VendorId 108 -DN_ProductCode 5250\-DN_DeviceType 12 -DN_C1Interval 30 -DN_C1OutputSize -1 -DN_C1InputSize -12.2、EIO_UNIT添加福尼斯焊机通讯板及虚拟板;红字的“20”为DeviceNet 地址需根据福尼斯的拔码开关确定,不能与系统中已使用的地址重复。
-Name "ioFronius1" -UnitType "BK5250" -Bus "DeviceNet1" -DN_Address 20-Name "ioFroniusSim1" -UnitType "Virtual" -Bus "Virtual1"\-UnitLabel "RWArc Simulated welder"2.3、EIO_SIGNAL添加如下信号,所有信号不能修改;-Name "doFr1ArcOn" -SignalType "DO" -Unit "ioFronius1" -UnitMap "0"-Name "doFr1RobotReady" -SignalType "DO" -Unit "ioFronius1" -UnitMap "1"-Name "doFr1GasTest" -SignalType "DO" -Unit "ioFronius1" -UnitMap "8"-Name "doFr1FeedForward" -SignalType "DO" -Unit "ioFronius1" -UnitMap "9"-Name "doFr1FeedRetract" -SignalType "DO" -Unit "ioFronius1" -UnitMap "10"-Name "doFr1ErrorReset" -SignalType "DO" -Unit "ioFronius1" -UnitMap "11"-Name "doFr1TouchSense" -SignalType "DO" -Unit "ioFronius1" -UnitMap "12"-Name "doFr1TrchBlowOut" -SignalType "DO" -Unit "ioFronius1" -UnitMap "13"-Name "doFr1WeldingSim" -SignalType "DO" -Unit "ioFronius1" -UnitMap "31"-Name "diFr1ArcStable" -SignalType "DI" -Unit "ioFronius1" -UnitMap "0"\-FiltPas 50-Name "diFr1ProcessActv" -SignalType "DI" -Unit "ioFronius1" -UnitMap "2"-Name "diFr1MainCurrent" -SignalType "DI" -Unit "ioFronius1" -UnitMap "3"-Name "diFr1TorchColisn" -SignalType "DI" -Unit "ioFronius1" -UnitMap "4"-Name "diFr1WelderReady" -SignalType "DI" -Unit "ioFronius1" -UnitMap "5"-Name "diFr1CommunicRdy" -SignalType "DI" -Unit "ioFronius1" -UnitMap "6"-Name "aoFr1Power" -SignalType "AO" -Unit "ioFronius1" -UnitMap "32-47"\-EncType "UNSIGNED" -MaxLog 100 -MaxPhys 10 -MaxPhysLimit 10\-MaxBitVal 65535-Name "aoFr1ArcLength" -SignalType "AO" -Unit "ioFronius1"\-UnitMap "48-63" -EncType "UNSIGNED" -MaxLog 30 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 65535 -MinLog -30-Name "aoFr1Dynamic" -SignalType "AO" -Unit "ioFronius1" -UnitMap "64-71"\-EncType "UNSIGNED" -MaxLog 5 -MaxPhys 10 -MaxPhysLimit 10 -MaxBitVal 255\ -MinLog -5-Name "aoFr1BurnBackCor" -SignalType "AO" -Unit "ioFronius1"\-UnitMap "72-79" -EncType "UNSIGNED" -MaxLog 200 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 255 -MinLog -200-Name "aiFr1V olt_M" -SignalType "AI" -Unit "ioFronius1" -UnitMap "32-47"\-EncType "UNSIGNED" -MaxLog 100 -MaxPhys 10 -MaxPhysLimit 10\-MaxBitVal 65535-Name "aiFr1Current_M" -SignalType "AI" -Unit "ioFronius1"\-UnitMap "48-63" -EncType "UNSIGNED" -MaxLog 1000 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 65535-Name "aiFr1MotorCurr_M" -SignalType "AI" -Unit "ioFronius1"\-UnitMap "64-71" -EncType "UNSIGNED" -MaxLog 5 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 255-Name "aiFr1WireFeed_M" -SignalType "AI" -Unit "ioFronius1"\-UnitMap "80-95" -EncType "UNSIGNED" -MaxLog 366.67 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 65535-Name "goFr1Mode" -SignalType "GO" -Unit "ioFronius1" -UnitMap "2-4"-Name "goFr1JobNum" -SignalType "GO" -Unit "ioFronius1" -UnitMap "16-23"-Name "goFr1PrgNum" -SignalType "GO" -Unit "ioFronius1" -UnitMap "24-30"-Name "giFr1Error" -SignalType "GI" -Unit "ioFronius1" -UnitMap "8-15"-Name "siFr1WelderOK" -SignalType "DI" -Unit "ioFroniusSim1" -UnitMap "0"-Name "soFr1WelderOK" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "0"-Name "siFr1StopProc" -SignalType "DI" -Unit "ioFroniusSim1" -UnitMap "1"-Name "soFr1StopProc" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "1"\-Access "ALL"-Name "siFr1WireStick" -SignalType "DI" -Unit "ioFroniusSim1" -UnitMap "2"-Name "soFr1WireStick" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "2"-Name "soFr1UpdateSched" -SignalType "DO" -Unit "ioFroniusSim1"\-UnitMap "3"-Name "diFr1PartDetect" -SignalType "DI" -Unit "ioFroniusSim1"\-UnitMap "4"-Name "doFr1SensorRef" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "4"-Name "soFr1ArcOn" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "5"2.4、添加电弧反馈虚拟信号,解决跟踪路径不保存问题。
福尼斯焊机参数调节说明

福尼斯焊机参数调节说明
1.Job:要调节的Job:0-99=作业号
2.P :功率更改…通过调节送丝速度更改焊接功率
3.AL.1:弧长修正1,弧长修正。
焊接电压的+/-30;当启用协同脉冲功能时,AL.1 指基值弧长修正。
峰值弧长修正需调节参数AL.2。
4.dYn:直流或脉冲焊时的电弧吹力、电感调节:+/-5
5.GPr:预送气时间…0 –9.9s
6.Gpo:滞后停气时间…0 –9.9s
7.Fdc:缓送丝,用于SFi 无飞溅起弧附选功能时
8.Fdi:点动送丝速度
9.bbc:焊丝回烧修正…+/-0.20s
10.I-S:起弧电流,焊接电流的0-200%
11.SL:衰减时间:0.1-9.9s
12.I-E:收弧电流,焊接电流的0-200%
13.t-S………….起弧时间
14.t-E………….收弧时间
15.SPt:点焊时间0.1-5.0s
16.F:频率用于协同脉冲选项,OFF或0.5-5Hz
17.dFd:脉动送丝速度调节协同脉冲的功率变量,通过送丝速度调节:0.0-2.0m/min
18.AL.2:峰值弧长修正+/-30%
19.Tri:扳机顺序转换焊枪操作模式:2 步式,4 步式,特殊2 步式,特殊4 步式及点焊模式。
以太网焊机与安川机器人
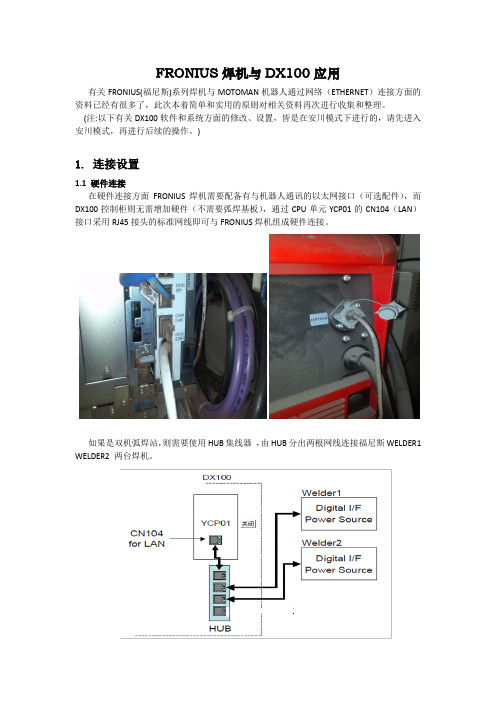
FRONIUS焊机与DX100应用有关FRONIUS(福尼斯)系列焊机与MOTOMAN机器人通过网络(ETHERNET)连接方面的资料已经有很多了,此次本着简单和实用的原则对相关资料再次进行收集和整理。
(注:以下有关DX100软件和系统方面的修改、设置,皆是在安川模式下进行的,请先进入安川模式,再进行后续的操作。
)1. 连接设置1.1 硬件连接在硬件连接方面FRONIUS焊机需要配备有与机器人通讯的以太网接口(可选配件),而DX100控制柜则无需增加硬件(不需要弧焊基板),通过CPU单元YCP01的CN104(LAN)接口采用RJ45接头的标准网线即可与FRONIUS焊机组成硬件连接。
如果是双机弧焊站,则需要使用HUB集线器,由HUB分出两根网线连接福尼斯WELDER1 WELDER2 两台焊机。
1.2确认系统版本检查DX100系统版本,系统为DS1.50(含DS1.50)以上版本才可以使用此通讯功能,否则请先升级DX100系统到DS1.50以上版本,升级前请务必做好全面备份,如系统有外部轴,还需记录好各外部轴相关设置,以便后期恢复。
1.3 拆除弧焊基板DX100与FRONIUS焊机通讯是在DX100系统内部模拟出弧焊数字I/F基板以此来进行信号的交换,该数字I/F基板是虚拟的并不是实物,会与弧焊基板(YEW01等)存在冲突,请检查DX100控制柜,如有弧焊基板,请将弧焊基板的电源和通讯连接拆除,再到维护模式确认修改。
(1)维护模式----系统----I/O单元(2)连续按【Enter】键(确认无YEW基板)----【Enter】键确认修改2.系统设置2.1确认拆除YEW01弧焊基板(1)进入维护模式(2)系统----设置----I/O单元(按ENTER检查是否有YEW基板)(3)确认已拆除,进行下面设置2.2弧焊功能设置使用Fronius 焊机时,将【弧焊功能】由【标准】设置为【增强】(1)进入维护模式(2)系统----设置----选项功能(3)弧焊----设置为【增强】(如出现初始化数据选项,请点击确认。
焊接机器人相关参数及设置

焊接机器人相关参数及设置标题:焊接机器人的参数及设置一、焊接机器人的基本参数1、机器人型号:这是选择焊接机器人的首要步骤。
根据实际应用需求,选择适合的型号,例如负载能力、臂展、精度等。
2、控制器:控制器的性能直接决定了机器人的运动性能。
选择具有高处理能力、快速响应和稳定性的控制器。
3、伺服系统:伺服系统是焊接机器人的重要组成部分,它决定了机器人的运动精度和速度。
4、焊机型号:选择适合的焊机型号,确保它可以与机器人控制器兼容,并且能够满足实际的焊接需求。
二、焊接机器人的设置步骤1、准备工作:需要确保机器人工作区域的安全,包括设置防护栏、关闭不必要的电源等。
2、校准:对机器人进行校准,以确保其运动轨迹的准确性。
这包括对机器人的底座、关节和工具进行校准。
3、编程:根据实际需要,使用机器人编程语言(如G代码)编写程序。
这可以包括运动轨迹、速度、焊接参数等。
4、测试:在正式使用前,需要进行测试以确认机器人的性能是否满足要求。
这包括检查机器人的运动轨迹、焊接质量等。
5、调整:如果测试结果不满足要求,需要对机器人进行调整。
这可能包括更改程序、调整焊接参数等。
6、维护:定期对机器人进行维护,以确保其正常运行。
这包括清洁、润滑关节、检查电线等。
三、总结焊接机器人的参数及设置是确保其正常运行的关键步骤。
在选择机器人时,需要根据实际需求选择合适的型号和配置。
在设置机器人时,需要按照规定的步骤进行操作,以确保机器人的运动轨迹准确、焊接质量优良。
定期的维护和检查也是保证机器人长期稳定运行的重要措施。
工业机器人的焊接应用焊接机器人标题:工业机器人的焊接应用:焊接机器人随着科技的快速发展,()和机器人技术已经在各行各业中得到了广泛应用。
其中,工业机器人更是凭借其高效、精准和可靠的特点,成为了现代制造业的重要组成部分。
在众多工业机器人应用中,焊接机器人的使用尤为引人瞩目,它们在提高生产效率、降低生产成本、保证产品质量等方面发挥了巨大的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
配置福尼斯焊机的机器人系统参数设置说明吴为进2011-10 一、检查系统配置,确认ARC选项为:650-9 Fronius TPS4000/5000ABB出厂默认选项,如果使用旧机器人ARC选项可能不是650-9 Fronius TPS4000/5000,需重装系统,参考系统安装手册。
二、修改EIO.cfg,配置肯比焊机信号2.1、EIO_UNIT_TYPE确认福尼斯焊机通讯板定义;如果没有定义,添加如下定义。
-Name "BK5200" -BusType "DNET" -VendorName "BECKHOFF"\-ProductName "BECKHOFF" -DN_VendorId 108 -DN_ProductCode 5200\-DN_DeviceType 12 -DN_MajorRev 3 -DN_C1Interval 30 -DN_C1OutputSize -1\-DN_C1InputSize -1-Name "BK5250" -BusType "DNET" -VendorName "BECKHOFF"\-ProductName "BECKHOFF" -DN_VendorId 108 -DN_ProductCode 5250\-DN_DeviceType 12 -DN_C1Interval 30 -DN_C1OutputSize -1 -DN_C1InputSize -12.2、EIO_UNIT添加福尼斯焊机通讯板及虚拟板;红字的“20”为DeviceNet 地址需根据福尼斯的拔码开关确定,不能与系统中已使用的地址重复。
-Name "ioFronius1" -UnitType "BK5250" -Bus "DeviceNet1" -DN_Address 20-Name "ioFroniusSim1" -UnitType "Virtual" -Bus "Virtual1"\-UnitLabel "RWArc Simulated welder"2.3、EIO_SIGNAL添加如下信号,所有信号不能修改;-Name "doFr1ArcOn" -SignalType "DO" -Unit "ioFronius1" -UnitMap "0"-Name "doFr1RobotReady" -SignalType "DO" -Unit "ioFronius1" -UnitMap "1"-Name "doFr1GasTest" -SignalType "DO" -Unit "ioFronius1" -UnitMap "8"-Name "doFr1FeedForward" -SignalType "DO" -Unit "ioFronius1" -UnitMap "9"-Name "doFr1FeedRetract" -SignalType "DO" -Unit "ioFronius1" -UnitMap "10"-Name "doFr1ErrorReset" -SignalType "DO" -Unit "ioFronius1" -UnitMap "11"-Name "doFr1TouchSense" -SignalType "DO" -Unit "ioFronius1" -UnitMap "12"-Name "doFr1TrchBlowOut" -SignalType "DO" -Unit "ioFronius1" -UnitMap "13"-Name "doFr1WeldingSim" -SignalType "DO" -Unit "ioFronius1" -UnitMap "31"-Name "diFr1ArcStable" -SignalType "DI" -Unit "ioFronius1" -UnitMap "0"\-FiltPas 50-Name "diFr1ProcessActv" -SignalType "DI" -Unit "ioFronius1" -UnitMap "2"-Name "diFr1MainCurrent" -SignalType "DI" -Unit "ioFronius1" -UnitMap "3"-Name "diFr1TorchColisn" -SignalType "DI" -Unit "ioFronius1" -UnitMap "4"-Name "diFr1WelderReady" -SignalType "DI" -Unit "ioFronius1" -UnitMap "5"-Name "diFr1CommunicRdy" -SignalType "DI" -Unit "ioFronius1" -UnitMap "6"-Name "aoFr1Power" -SignalType "AO" -Unit "ioFronius1" -UnitMap "32-47"\-EncType "UNSIGNED" -MaxLog 100 -MaxPhys 10 -MaxPhysLimit 10\-MaxBitVal 65535-Name "aoFr1ArcLength" -SignalType "AO" -Unit "ioFronius1"\-UnitMap "48-63" -EncType "UNSIGNED" -MaxLog 30 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 65535 -MinLog -30-Name "aoFr1Dynamic" -SignalType "AO" -Unit "ioFronius1" -UnitMap "64-71"\-EncType "UNSIGNED" -MaxLog 5 -MaxPhys 10 -MaxPhysLimit 10 -MaxBitVal 255\ -MinLog -5-Name "aoFr1BurnBackCor" -SignalType "AO" -Unit "ioFronius1"\-UnitMap "72-79" -EncType "UNSIGNED" -MaxLog 200 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 255 -MinLog -200-Name "aiFr1V olt_M" -SignalType "AI" -Unit "ioFronius1" -UnitMap "32-47"\-EncType "UNSIGNED" -MaxLog 100 -MaxPhys 10 -MaxPhysLimit 10\-MaxBitVal 65535-Name "aiFr1Current_M" -SignalType "AI" -Unit "ioFronius1"\-UnitMap "48-63" -EncType "UNSIGNED" -MaxLog 1000 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 65535-Name "aiFr1MotorCurr_M" -SignalType "AI" -Unit "ioFronius1"\-UnitMap "64-71" -EncType "UNSIGNED" -MaxLog 5 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 255-Name "aiFr1WireFeed_M" -SignalType "AI" -Unit "ioFronius1"\-UnitMap "80-95" -EncType "UNSIGNED" -MaxLog 366.67 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 65535-Name "goFr1Mode" -SignalType "GO" -Unit "ioFronius1" -UnitMap "2-4"-Name "goFr1JobNum" -SignalType "GO" -Unit "ioFronius1" -UnitMap "16-23"-Name "goFr1PrgNum" -SignalType "GO" -Unit "ioFronius1" -UnitMap "24-30"-Name "giFr1Error" -SignalType "GI" -Unit "ioFronius1" -UnitMap "8-15"-Name "siFr1WelderOK" -SignalType "DI" -Unit "ioFroniusSim1" -UnitMap "0"-Name "soFr1WelderOK" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "0"-Name "siFr1StopProc" -SignalType "DI" -Unit "ioFroniusSim1" -UnitMap "1"-Name "soFr1StopProc" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "1"\-Access "ALL"-Name "siFr1WireStick" -SignalType "DI" -Unit "ioFroniusSim1" -UnitMap "2"-Name "soFr1WireStick" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "2"-Name "soFr1UpdateSched" -SignalType "DO" -Unit "ioFroniusSim1"\-UnitMap "3"-Name "diFr1PartDetect" -SignalType "DI" -Unit "ioFroniusSim1"\-UnitMap "4"-Name "doFr1SensorRef" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "4"-Name "soFr1ArcOn" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "5"2.4、添加电弧反馈虚拟信号,解决跟踪路径不保存问题。