福尼斯双机焊接功能设置1
福尼斯电焊机安全操作及保养规程

福尼斯电焊机安全操作及保养规程1. 前言在使用福尼斯电焊机时,安全操作是至关重要的。
正确的使用方法和及时的维护保养,可以最大程度地确保您的安全和设备的正常运行。
本文将介绍福尼斯电焊机的安全操作规程以及保养维护规程,帮助您更好地使用设备。
2. 安全操作规程2.1 保持设备清洁保持设备清洁和干燥是很重要的。
使用前要仔细检查设备外壳是否有损坏或有裂纹、缺口等情况。
电焊机受损可能导致电击、火灾等危险。
如果设备外壳已经损坏,请不要使用设备,应当及时联系厂家或维修人员进行修理。
2.2 穿戴防护装备在使用电焊机时,需要穿戴适当的防护装备,包括焊接面罩、耳塞、手套、工作服等等,确保自身安全。
焊接工作时,很容易散发出的有害气体,应该使用适当的通风设备通风。
2.3 焊接前检查工作在开启电焊机之前,需要对设备及周边环境进行检查,必须确保遵循以下步骤:•检查设备安装是否正确,电源插头和电源电压是否符合要求。
•检查电焊机是否处于正常状态,功能是否正常。
•确保工作环境有足够的光,以便焊接工作能够进行。
•检查工件是否处于固定状态。
•检查地线是否连接好。
2.4 避免过载过载是电焊机常见的问题,必须遵循以下规则:•确保使用的设备符合电焊机的功率要求。
•不要长时间(超过10分钟)进行高功率的焊接。
•焊接过程中,避免电焊机超载,以避免危险的可能性。
2.5 关闭焊接设备在完成工作时,需要关闭电焊机。
在关机时,请注意以下事项:•确保所有电源插头已关闭并拔出。
•清洁电焊机,清除焊渣及其他碎屑。
•储存电焊机及其他工具用品在安全、干燥、通风的地方。
3. 保养维护规程3.1 清洁电焊机清洁设备是很重要的,它可以减少设备故障率,提高电焊焊接质量。
应周期性地将设备和周边环境进行清洁。
在清洁过程中,禁止水和清洁剂进入设备内部。
3.2 更换摩擦片摩擦片是电焊机的重要部件之一。
在设备长时间使用的情况下,摩擦片会磨损或破损。
因此,应该在破损或磨损的时候及时更换。
FANUC&福尼斯以太网通讯

FANUC机器人与福尼斯焊 机以太网通讯硬件需求1、B柜体使用普通网线即可 2、Mate柜体需要使用绞线接 2 M t 柜体需要使用绞线接 法,即电脑和电脑连接的网线。
3、福尼斯焊机必须配置以太 网卡以太网通讯一、软硬件安装福尼斯焊接与机器人通讯网线只能插在 PORT2接口,确保已经安装软件 R540“EthernetIP I/O scan”和 R653 Fronius Weld Eq Lib R653“Fronius Weld Eq Lib ”焊机通讯设置(1)1、开机进入控制启动,将 1 开机进入控制启动,将 Manufacturer选择为General Purpose,再进行冷启动,对焊机 信号进行清零。
焊机通讯设置(2)2、冷启动后,再进行一次控制启动,将Manufacturer选择为 General Purpose,将Model选择为TS/TPS with Enet。
同时,将下 面Multi-process改为ENABLED焊机通讯设置(3)3、选择完后,系统 3 选择完后 系统 会对焊机信号进行分 配,首先会出现一对 话框询问焊机信号的 大小,是否选择296 pts?一般都选YES。
随后会出现对话框 询问是自动分配信 号还是自己指定信 号开始点, 般选 号开始点 一般选 择NO让其自动分配。
分配完后可进行冷 启动。
焊机通讯设置(4)4、福尼斯网线通讯和DeviceNet通讯一样, 最后需要对两个信号进行置反。
值得注意 的是,机器人数字I/O默认只显示512个, 如果焊机信号自动分配在DI/O 512以后, 如 焊 信 自动 在 后 会导致看不到焊机信号而无法修改信号。
解决方法如下:在控制启动下按MENU键, 按0进入菜单第二页,选择1、PROGRAM 按0进入菜单第二页 选择1 PROGRAM SETUP焊机通讯设置(5)5、进入Program Limits页 面后,修改第8条 Num.Dig.ports可修改数字 Num Dig ports可修改数字 I/O的显示数量,比如修改 为1024。
以太网焊机与安川机器人
FRONIUS焊机与DX100应用有关FRONIUS(福尼斯)系列焊机与MOTOMAN机器人通过网络(ETHERNET)连接方面的资料已经有很多了,此次本着简单和实用的原则对相关资料再次进行收集和整理。
(注:以下有关DX100软件和系统方面的修改、设置,皆是在安川模式下进行的,请先进入安川模式,再进行后续的操作。
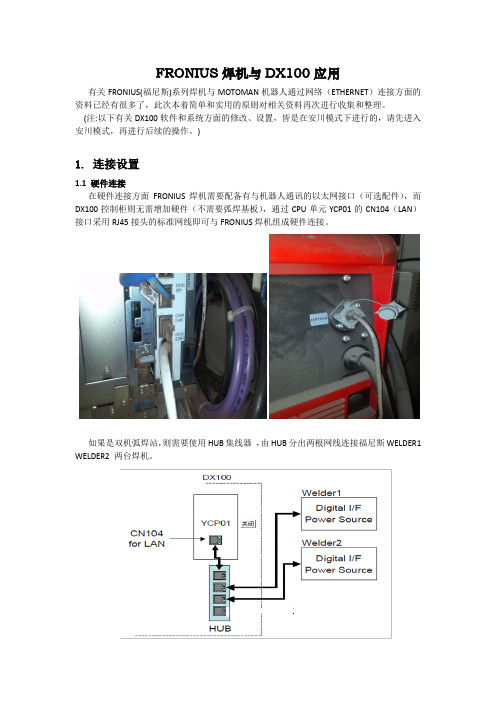
)1. 连接设置1.1 硬件连接在硬件连接方面FRONIUS焊机需要配备有与机器人通讯的以太网接口(可选配件),而DX100控制柜则无需增加硬件(不需要弧焊基板),通过CPU单元YCP01的CN104(LAN)接口采用RJ45接头的标准网线即可与FRONIUS焊机组成硬件连接。
如果是双机弧焊站,则需要使用HUB集线器,由HUB分出两根网线连接福尼斯WELDER1 WELDER2 两台焊机。
1.2确认系统版本检查DX100系统版本,系统为DS1.50(含DS1.50)以上版本才可以使用此通讯功能,否则请先升级DX100系统到DS1.50以上版本,升级前请务必做好全面备份,如系统有外部轴,还需记录好各外部轴相关设置,以便后期恢复。
1.3 拆除弧焊基板DX100与FRONIUS焊机通讯是在DX100系统内部模拟出弧焊数字I/F基板以此来进行信号的交换,该数字I/F基板是虚拟的并不是实物,会与弧焊基板(YEW01等)存在冲突,请检查DX100控制柜,如有弧焊基板,请将弧焊基板的电源和通讯连接拆除,再到维护模式确认修改。
(1)维护模式----系统----I/O单元(2)连续按【Enter】键(确认无YEW基板)----【Enter】键确认修改2.系统设置2.1确认拆除YEW01弧焊基板(1)进入维护模式(2)系统----设置----I/O单元(按ENTER检查是否有YEW基板)(3)确认已拆除,进行下面设置2.2弧焊功能设置使用Fronius 焊机时,将【弧焊功能】由【标准】设置为【增强】(1)进入维护模式(2)系统----设置----选项功能(3)弧焊----设置为【增强】(如出现初始化数据选项,请点击确认。
福尼斯焊机操作培训_初级篇

按下急停后出现,一般伴随SRVO-007 (措施)如图 复位F4 1CH 后 选择复位单通道异常, 然后在按RESET
Fronius等离子系统 珠海福尼斯 4/20084/2008
简单故障报警排除
焊机显示no|H2O
表示无水,快速关闭大小弧,防止烧枪。 检查水箱及水循环是否工作正常 检查需不需添加冷却水 最后消报警
初级篇
Fronius等离子系统 珠海福尼斯 4/20084/2008
等离子焊接示意图
冷却水
等离子气
焊接电源
高频 发生 器
保护气
等离子 电源
焊机电 源
钨针
火嘴
Fronius等离子系统 珠海福尼斯 4/20084/2008
PLASMA设备
焊机 TransTig 2200 Job 等离子发生器 PlasmaModule 10 水箱 FK4000R 焊枪 PTW1500 送丝系统(选配) KD 1500 D-11 KD Supply
Fronius等离子系统 珠海福尼斯 4/20084/2008
机械手TP示教盒屏幕
状态信号 指示灯 正在被执行的程序 警告报警消息 当前坐标系
示教速度
正在编辑 的程序 行号 程序结束 标志 提示消息 当前行/总行
运行状态
当前模式 当前运行行号 功能键菜单
Fronius等离子系统 珠海福尼斯 4/20084/2008
存储键
调节旋钮
测气键
模式选择键
Fronius等离子系统 珠海福尼斯 4/20084/2008
控制面板——PlasmaModule 10
存储键
调节旋钮
测气键
起弧键
福尼斯焊机CMT焊接工艺介绍

CMT过渡技术为MIG/MAG焊的应用拓开了新 的领域
MIG/MAG焊是目前世界上应用最广泛、最经济的焊接工艺。 但由于存在热输入量大、变形严重、飞溅无法避免等缺陷, 限制了它在某些领域的应用,尤其1mm以下的薄板更是其 应用的“禁区”。
脉冲电弧 短路电弧
CMT 电弧
喷射电弧
电弧过渡形式
旋转电弧
珠海市科盈焊接器材有限公司 珠海市福尼斯焊接技术有限公司
珠海市科盈焊接器材有限公司 珠海市福尼斯焊接技术有限公司
CMT焊较普通MIG/MAG焊的优势:
CMT更低的热输入量,焊缝均匀一致
普通MIG焊
送丝速度
5,0 m/min
焊接电流
96 A
焊接电压
13,3 V
CMT
送丝速度
5,0 m/min
焊接电流
84 A
焊接电压
11,1 V
珠海市科盈焊接器材有限公司 珠海市福尼斯焊接技术有限公司
短路过渡
vD IS US
Short arc period
arc period T
t t
t
珠海市科盈焊接器材有限公司 珠海市福尼斯焊接技术有限公司
CMT过渡
vD
t
Plasma period
Short arc
Boost period burning period
IS
t US
t T
珠海市科盈焊接器材有限公司 珠海市福尼斯焊接技术有限公司
珠海市科盈焊接器材有限公司 珠海市福尼斯焊接技术有限公司
CMT焊接同普通MIG/MAG焊有三个 显著的特点:
(1) 送丝运动与熔滴过渡过程进行数字化协调
当数字化的控制监测到一 个短路信号,就会反馈给送 丝机,送丝机作出回应,迅 速回抽焊丝,从而使得焊 丝与熔滴分离。在全数字 化的控制下,这种过渡方 式完去区别于传统的熔滴 过渡方式。
TPS(奥地利福尼斯)焊机使用说明书
改装焊机
如果没得到制造厂商的许可,最好不要对焊机 作任何的改装、安装附件及修改。 及时换下不合格的元件。
备用件和易损件 使用 Fronius 厂的原装备用件和易损件。那些其 它厂家的元件,无法确定他们是否能满足那些 特殊设计要求及其它耐压、安全方面的性能。 在定购备用件时,请注明确切的名称和相关的 零件号,在备件表中给以特定的说明。同时, 请提供焊机的机身号。
第二层设置菜单--------------------------------44
控制面板(Standard) 控制面板(Comfort0
参数“2nd”----------------------------------------45
MIG/MAG 普通/脉冲焊 TIG 焊 手工电弧焊
推拉丝系统--------------------------------------45 推拉丝系统故障代码--------------------------48 测量焊接回路电阻 r---------------------------49 测量焊接回路电感 L---------------------------49 保养和维护--------------------------------------50 故障分析-----------------------------------------51 技术数据-----------------------------------------55
TS4000/5000 和 TPS2700/4000/5000 电源 FK4000 和 FK4000R 水箱 VR4000/C,VR7000,VR2000 送丝机
3
[安全守则]
概述
此类型焊机是遵照焊机技术规定制造的,符合所有 安全规定。但错误的操作或者滥用焊机则将导致如 下危险:
Z1 配置福尼斯焊机的机器人系统参数设置说明
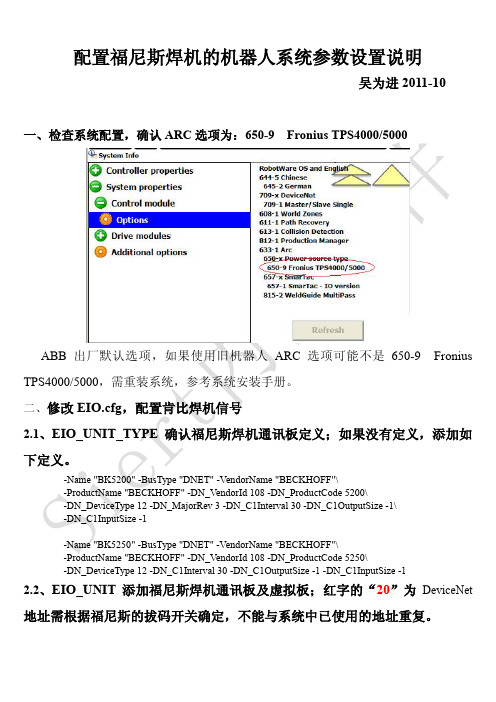
配置福尼斯焊机的机器人系统参数设置说明吴为进2011-10 一、检查系统配置,确认ARC选项为:650-9 Fronius TPS4000/5000ABB出厂默认选项,如果使用旧机器人ARC选项可能不是650-9 Fronius TPS4000/5000,需重装系统,参考系统安装手册。
二、修改EIO.cfg,配置肯比焊机信号2.1、EIO_UNIT_TYPE确认福尼斯焊机通讯板定义;如果没有定义,添加如下定义。
-Name "BK5200" -BusType "DNET" -VendorName "BECKHOFF"\-ProductName "BECKHOFF" -DN_VendorId 108 -DN_ProductCode 5200\-DN_DeviceType 12 -DN_MajorRev 3 -DN_C1Interval 30 -DN_C1OutputSize -1\-DN_C1InputSize -1-Name "BK5250" -BusType "DNET" -VendorName "BECKHOFF"\-ProductName "BECKHOFF" -DN_VendorId 108 -DN_ProductCode 5250\-DN_DeviceType 12 -DN_C1Interval 30 -DN_C1OutputSize -1 -DN_C1InputSize -12.2、EIO_UNIT添加福尼斯焊机通讯板及虚拟板;红字的“20”为DeviceNet 地址需根据福尼斯的拔码开关确定,不能与系统中已使用的地址重复。
-Name "ioFronius1" -UnitType "BK5250" -Bus "DeviceNet1" -DN_Address 20-Name "ioFroniusSim1" -UnitType "Virtual" -Bus "Virtual1"\-UnitLabel "RWArc Simulated welder"2.3、EIO_SIGNAL添加如下信号,所有信号不能修改;-Name "doFr1ArcOn" -SignalType "DO" -Unit "ioFronius1" -UnitMap "0"-Name "doFr1RobotReady" -SignalType "DO" -Unit "ioFronius1" -UnitMap "1"-Name "doFr1GasTest" -SignalType "DO" -Unit "ioFronius1" -UnitMap "8"-Name "doFr1FeedForward" -SignalType "DO" -Unit "ioFronius1" -UnitMap "9"-Name "doFr1FeedRetract" -SignalType "DO" -Unit "ioFronius1" -UnitMap "10"-Name "doFr1ErrorReset" -SignalType "DO" -Unit "ioFronius1" -UnitMap "11"-Name "doFr1TouchSense" -SignalType "DO" -Unit "ioFronius1" -UnitMap "12"-Name "doFr1TrchBlowOut" -SignalType "DO" -Unit "ioFronius1" -UnitMap "13"-Name "doFr1WeldingSim" -SignalType "DO" -Unit "ioFronius1" -UnitMap "31"-Name "diFr1ArcStable" -SignalType "DI" -Unit "ioFronius1" -UnitMap "0"\-FiltPas 50-Name "diFr1ProcessActv" -SignalType "DI" -Unit "ioFronius1" -UnitMap "2"-Name "diFr1MainCurrent" -SignalType "DI" -Unit "ioFronius1" -UnitMap "3"-Name "diFr1TorchColisn" -SignalType "DI" -Unit "ioFronius1" -UnitMap "4"-Name "diFr1WelderReady" -SignalType "DI" -Unit "ioFronius1" -UnitMap "5"-Name "diFr1CommunicRdy" -SignalType "DI" -Unit "ioFronius1" -UnitMap "6"-Name "aoFr1Power" -SignalType "AO" -Unit "ioFronius1" -UnitMap "32-47"\-EncType "UNSIGNED" -MaxLog 100 -MaxPhys 10 -MaxPhysLimit 10\-MaxBitVal 65535-Name "aoFr1ArcLength" -SignalType "AO" -Unit "ioFronius1"\-UnitMap "48-63" -EncType "UNSIGNED" -MaxLog 30 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 65535 -MinLog -30-Name "aoFr1Dynamic" -SignalType "AO" -Unit "ioFronius1" -UnitMap "64-71"\-EncType "UNSIGNED" -MaxLog 5 -MaxPhys 10 -MaxPhysLimit 10 -MaxBitVal 255\ -MinLog -5-Name "aoFr1BurnBackCor" -SignalType "AO" -Unit "ioFronius1"\-UnitMap "72-79" -EncType "UNSIGNED" -MaxLog 200 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 255 -MinLog -200-Name "aiFr1V olt_M" -SignalType "AI" -Unit "ioFronius1" -UnitMap "32-47"\-EncType "UNSIGNED" -MaxLog 100 -MaxPhys 10 -MaxPhysLimit 10\-MaxBitVal 65535-Name "aiFr1Current_M" -SignalType "AI" -Unit "ioFronius1"\-UnitMap "48-63" -EncType "UNSIGNED" -MaxLog 1000 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 65535-Name "aiFr1MotorCurr_M" -SignalType "AI" -Unit "ioFronius1"\-UnitMap "64-71" -EncType "UNSIGNED" -MaxLog 5 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 255-Name "aiFr1WireFeed_M" -SignalType "AI" -Unit "ioFronius1"\-UnitMap "80-95" -EncType "UNSIGNED" -MaxLog 366.67 -MaxPhys 10\-MaxPhysLimit 10 -MaxBitVal 65535-Name "goFr1Mode" -SignalType "GO" -Unit "ioFronius1" -UnitMap "2-4"-Name "goFr1JobNum" -SignalType "GO" -Unit "ioFronius1" -UnitMap "16-23"-Name "goFr1PrgNum" -SignalType "GO" -Unit "ioFronius1" -UnitMap "24-30"-Name "giFr1Error" -SignalType "GI" -Unit "ioFronius1" -UnitMap "8-15"-Name "siFr1WelderOK" -SignalType "DI" -Unit "ioFroniusSim1" -UnitMap "0"-Name "soFr1WelderOK" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "0"-Name "siFr1StopProc" -SignalType "DI" -Unit "ioFroniusSim1" -UnitMap "1"-Name "soFr1StopProc" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "1"\-Access "ALL"-Name "siFr1WireStick" -SignalType "DI" -Unit "ioFroniusSim1" -UnitMap "2"-Name "soFr1WireStick" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "2"-Name "soFr1UpdateSched" -SignalType "DO" -Unit "ioFroniusSim1"\-UnitMap "3"-Name "diFr1PartDetect" -SignalType "DI" -Unit "ioFroniusSim1"\-UnitMap "4"-Name "doFr1SensorRef" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "4"-Name "soFr1ArcOn" -SignalType "DO" -Unit "ioFroniusSim1" -UnitMap "5"2.4、添加电弧反馈虚拟信号,解决跟踪路径不保存问题。
福尼斯焊机参数调节说明

福尼斯焊机参数调节说明
1.Job:要调节的Job:0-99=作业号
2.P :功率更改…通过调节送丝速度更改焊接功率
3.AL.1:弧长修正1,弧长修正。
焊接电压的+/-30;当启用协同脉冲功能时,AL.1 指基值弧长修正。
峰值弧长修正需调节参数AL.2。
4.dYn:直流或脉冲焊时的电弧吹力、电感调节:+/-5
5.GPr:预送气时间…0 –9.9s
6.Gpo:滞后停气时间…0 –9.9s
7.Fdc:缓送丝,用于SFi 无飞溅起弧附选功能时
8.Fdi:点动送丝速度
9.bbc:焊丝回烧修正…+/-0.20s
10.I-S:起弧电流,焊接电流的0-200%
11.SL:衰减时间:0.1-9.9s
12.I-E:收弧电流,焊接电流的0-200%
13.t-S………….起弧时间
14.t-E………….收弧时间
15.SPt:点焊时间0.1-5.0s
16.F:频率用于协同脉冲选项,OFF或0.5-5Hz
17.dFd:脉动送丝速度调节协同脉冲的功率变量,通过送丝速度调节:0.0-2.0m/min
18.AL.2:峰值弧长修正+/-30%
19.Tri:扳机顺序转换焊枪操作模式:2 步式,4 步式,特殊2 步式,特殊4 步式及点焊模式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 检查机器人系统版本是DS1.40.00(XX)-00以前 还是以后版本 • 如果为DS1.40.00(XX)-00以后(包含此版本), 则不用升级 • 如果为DS1.40.00(XX)-00以前版本则需更新到 DS1.40.00(XX)-00以后版本 • 系统升级[连锁]+【8】+【选择】YASKAWAFra bibliotekYASKAWA
Robotics Division 5
MOTOMAN
软件设置
YASKAWA
Robotics Division 6
软件设置
MOTOMAN
1、检查I/O单元确认YEW基板已经拆除
• 1、进入维护模式 • 2.系统----设置----I/O单元(按ENTER检查是否有 YEW基板)
YASKAWA
Robotics Division 7
软件设置
MOTOMAN
2、设置网络选项功能
• 1、进入维护模式 • 2.系统----设置----OPTION FUNCTION • ----网络选项的 “细节”
YASKAWA
Robotics Division 8
软件设置
MOTOMAN
• 4.“设备” 更改为使用“ETHERNET” • 5.选择“细节”设置网络IP
Robotics Division 3
硬件配置
MOTOMAN
• 1.两机器人做好双机协调 • 2.两焊机(带网络通信基板)安装到位 • 3.拆除两个机器人电气柜YEW 基板
YASKAWA
Robotics Division 4
硬件配置
MOTOMAN
• 4.YCP LAN0 网线口连接HUB ,由HUB分出两 根网线连接福尼斯WELDER1 WELDER2.
• 7、此时检查:设置--I/O单元,看是否已经增加2 个VEW弧焊基板。
YASKAWA
Robotics Division 13
软件设置
MOTOMAN
网络设置注意事项
• 1、确认焊机1 焊机2的网络IP不同 • 2、确认焊机所设置IP分别对应福尼斯焊机内部 设置IP • 3、福尼斯内部IP需要福尼斯专门的编程电缆, 编程软件进行设置。
Robotics Division 17
功能简述
MOTOMAN
Weld user file NO.编辑步骤:
YASKAWA
Robotics Division 18
功能简述
MOTOMAN
设置用户焊接文件---Program NO.setting
Diameter
焊丝直径
WIRE(GA 焊丝材料 S) 及保护气 类型 Operation 操作模式 mode
YASKAWA
Robotics Division 21
功能简述 焊接文件调用示例
MOTOMAN
YASKAWA
Robotics Division 22
MOTOMAN上海技术服务科技术资料
MOTOMAN
楚宪发 2011年12月27日
YASKAWA
Robotics Division 23
YASKAWA
Robotics Division 9
软件设置
MOTOMAN
3、打开 WELDCOM 功能
• 1、进入维护模式 • 2.系统----设置----OPTION FUNCTION • ----焊接通讯功能的 “细节”
YASKAWA
Robotics Division 10
软件设置
MOTOMAN
YASKAWA
Robotics Division 19
功能简述
MOTOMAN
Param setting
Gas preflow Gas postflow Inching speed
提前开气 时间 延迟关气 时间 送丝速度
YASKAWA
Robotics Division 20
功能简述
MOTOMAN
WIRE/GAS SETTING
MOTOMAN上海技术服务科技术资料
MOTOMAN
福尼斯双机焊接CMT功能设置
上海技术服务科
楚宪发
YASKAWA
Robotics Division 1
改造步骤
MOTOMAN
• • • •
升级系统版本 硬件配置 系统设置 功能简述
YASKAWA
Robotics Division 2
系统版本确认
MOTOMAN
YASKAWA
Robotics Division 14
软件设置
MOTOMAN
DX参数设置
YASKAWA
Robotics Division 15
功能简述
MOTOMAN
功能简述
YASKAWA
Robotics Division 16
功能简述
MOTOMAN
1、设置弧焊菜单中的引弧文件 各个菜单显示
YASKAWA
• 3.„焊机设置’窗口如图 • 4.选择 FRONIUS TPS
YASKAWA
Robotics Division 11
软件设置
MOTOMAN
• 5.选择福尼斯后的效果如图 • 6.对焊机1、2进行 “细节”设置—设置焊机1.2网络
YASKAWA
Robotics Division 12
软件设置
MOTOMAN