北京大学理论力学讲义 LagrangeEq
理论力学_ 拉格朗日表述(课件)_
∑ ∑ s
α =1
⎛⎜⎜⎝
d dt
∂L ∂q&α
⎟⎟⎞⎠q&α
s
−
∂L
α =1 ∂qα
q&α
=0
∑ ∑ ∑ s
α =1
⎜⎜⎛⎝
d dt
∂L ∂q&α
⎞q&α ⎠
=
sd α =1 dt
⎜⎜⎛⎝
∂L ∂q&α
q&α
⎞s −
∂L
⎠ α =1 ∂q&α
q&&α
∑ ∑ ∑ d
dt
s α =1
∂L ∂q&α
q&α
§8-2 广义动量积分和广义能量积分
L = 1 m(x& 2 + y& 2 + z& 2 ) − mgz 2
∂L = 0 ∂x
∂L = 0 ∂y
px
=
∂L ∂x&
=
mx&
=
常量
py
=
∂L ∂y&
=
my&
=
常量
L = 1 m(r& 2 + r 2θ&2 + r 2 sin 2 θϕ& 2 ) − mgr cosθ
§8-2 广义动量积分和广义能量积分
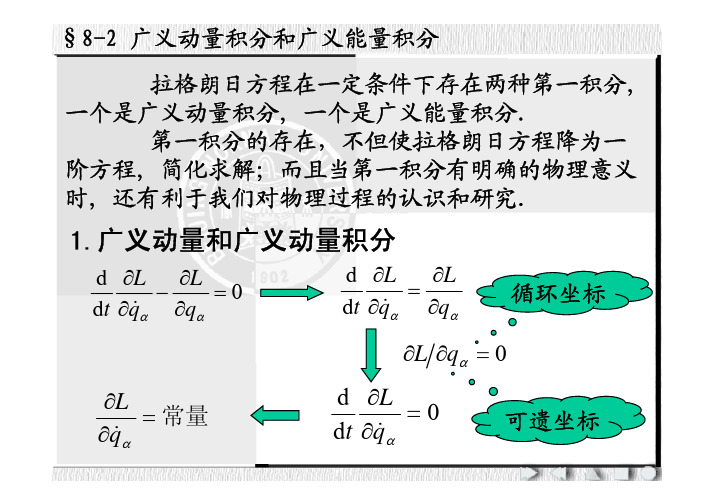
拉格朗日方程在一定条件下存在两种第一积分, 一个是广义动量积分, 一个是广义能量积分.
第一积分的存在,不但使拉格朗日方程降为一 阶方程, 简化求解;而且当第一积分有明确的物理意义 时, 还有利于我们对物理过程的认识和研究.
1.广义动量和广义动量积分
d dt
大学理论力学全套课件3
v v ∂ri ∂ri , 由于r是广义坐标和时间的函数,即r=r(qα,t),所以 ∂qα ∂t 义坐标和时间和函数,不显含广义速度。 v v v v v & & & & & ∂ri ∂q1 ∂ri ∂q2 ∂ri ∂qα ∂r ∂ri ∂qs ∂ = + +L+ +L+ + ∴ & & & & & & ∂qα ∂q1 ∂qα ∂q2 ∂q∂ ∂qα ∂qα ∂qs ∂qα ∂qα v ∂r = i 这就是我们要证明的第一个关系。 ∂qα
v v 当力学体系受理想约束时,有 ∑ ( Ri ⋅ δ ri ) = 0
n i =1
石河子大学物理系殷保祥
则
v v n v v Fi ⋅ δ ri − ∑ mi && ⋅ δ ri = 0 LL (22) ri ∑
n i =1 i =1
(22)式说明非惯性系中主动力和惯性力的虚功的代数和为零,称 为是非惯性系的虚功原理,方程(22)称为d’Alembert-Lagrange方程, 又叫第一类Lagrange方程。方程是用功的形式表述的。所以称为是力 学方程的普遍形式。
v v ∂ d ri d ∂ ri 利用(27)式 B: ( ∂ q ) = ∂ q ( dt )LL (27) dt α α
v v v n n v ∂ ri d v ∂ dri v ∂ri & & r + ∑ mi ri ( ) (∑ mi ri ) = ∑ m i &&i 得 ∂qα dt ∂qα ∂qα dt i =1 i =1 i =1 v v n n & ∂ ri v v ∂ ri & = ∑ m i && ri + ∑ m i ri LL (30) ∂ qα ∂qα i =1 i =1 v v v n n d n v ∂ri v ∂ ri ∂ri v & && & & = ( ∑ mi ri ) − ∑ mi ri ∴ ∑ m i ri LL (31) ∂qα ∂ q α dt i =1 ∂qα i =1 i =1
理论力学教学材料11拉格郎日方程
12
设有n个质点组成的质点系,具有k个自由度,可由k个广
义坐标q1, q2,... , qk 确定其位置。在非定常约束下,质点 系中任一质点Mi的矢径
r i r i ( q 1 , q 2 , q k , t ) ( i 1 , 2 , n ) (a
Mi的虚位移(固定时间t):
10
(2)当sB改变δsB而δsA=0, 此时δsC= δsB /2
W Q B BP s W sB BB W Ps C 12 W (P 1 2 W )sB
系统平衡时有QA= QB=0 由QB= 0 得 W=2P 由QA= 0 得 F=W/2=P
f F 1 2P 2
11
§11-2 拉格郎日方程
Q j i n 1(X i q xij Y i q yij Z i q zij)
2、实际应用时,由
k W Q j q j Q 1q 1 Q 2q 2 . .Q .kq k j 1
由于各广义坐标彼此独立,所以在求某个广义力Qj时
,仅使对应的广义坐标qj变分 qj,而其余的广义坐标则保 持不变。即:令 qj≠0, qi=0(i=1,2,...n,i ≠ j),
ri
qri1q1qri2q2
... ri qk
qk
k ri
q j1 j
qj
(i1,2,n) (b)
代入质点系动力学普遍方程:
n
( F i m ia i)r i 0
i 1
( 1 3 0 1 )
13
n
( F i m ia i)r i 0
i 1
得 n F i: r i n m ia ir i 0
14
d d(m tiv i q rij) m ia i q rij m iv id d q trij
理论力学-拉格朗日方程省名师优质课赛课获奖课件市赛课一等奖课件
应用拉氏方程解题旳环节:
1. 鉴定质点系旳自由度k,选用合适旳广义坐标。必须注意: 不能漏掉独立旳坐标,也不能有多出旳(不独立)坐标。
2. 计算质点系旳动能T,表达为广义速度和广义坐标旳函数。
3. 计算广义力 Q j ( j1,2,,k ),计算公式为:
Qj
n
(X i
i 1
xi q j
Yi
yi q j
m2
l
2
2
m2
xl
cos
1 2
kx
2
m2
glcos
L x
(m1
m2
)
x
m2
l
cos
,
L x
kx
d dt
L x
(m1
m2
)
x
m2
lcos
m2l
2
sin
L
m2l
2
m2
xlcos
,
L
m2
xlsin
m2
glsin
d dt
(
L
)
m2
l
2
m2
xl
cos
m2
xl
sin
代入:
d dt
(
L q j
)
L q j
0
( j1,2,,k )
1
本章在达朗伯原理和虚位移原理旳基础上,进一步导 出动力学普遍方程和拉格朗日第二类方程(简称拉格朗日 方程)。动力学普遍方程和拉格朗日方程是研究动力学问 题旳有力手段,在处理非自由质点系旳动力学问题时,显 得十分简捷、规范。
2
第十七章 拉格朗日方程 §17–1 动力学普遍方程 §17–2 拉格朗日第二类方程 §17–3 拉格朗日第二类方程旳积分
理论力学经典课件第九章拉格朗日方程

理论力学经典课件第九章拉格朗日方程是理论力学的重要组成部分,涉及欧 拉-拉格朗日方程和拉格朗日函数。在本次课件中,我们将深入探讨拉格朗日 方程的定义、应用实例及求解原理,并介绍多自由度的系统和哈密顿原理。 让我们一起来了解这一重要的物理学概念。
引言
理论力学的概念
欧拉-拉格朗日方程
理论力学是研究质点、质点系、 星系、表面、弹性体、流体等 物质运动规律与作用的一门自 然科学。
对于任意系统,在所有可能的 运动中,其真实运动使得作用 量达到最小值,作用量函数是 由拉格朗日函数定义的。
拉格朗日函数
描述了系统状态、参数、状态 变量与计算所有物理量的关系, 对于每一个系统都是唯一的。
拉格朗日方程的概念
参考文献
相关教材
• 《理论力学》(屠光 绍编)
• 《哈密顿力学:平凡 而重要的力学》(丘
• 维《声方编法)学与系统形态 学:拉格朗日方程的 理论与应用》(杨晋 编)
相关论文章
• Wei-Chiam Chung ,David Nezlin, Chuan-Jong Shih (2002)The
• LVa. gBraalankgriiasnhnan, S. FMo.rBmhualtattaiochna,rjee S(p2r0in0g7e)r CUlSassical M echanics: Point Particles and Special Relativity
• , G.WEboardldi,SLc.iZeanntiefi(c 2008)On the Variational and Lag r an g i an Representations of Classical M echanics, INTECH Open Access Publisher
理论力学:第二类拉格朗日方程的总结

θ&&(θ ) = ? x&(θ ) = ?
L中无 x, t
∂T ∂x&
=
5 2
mx& +
1 2
mLθ& cosθ
=
C
&x&(θ ) = ?
5 mx&2 + 1 mL2θ&2 + 1Lmg(1− cosθ ) = E
4
6
2
2014-3-25
8
理论力学
习题课
∂T ∂x&
2014-3-25
根据对z轴的动量矩守恒和初始条件,可得关系式: ϕ&
=
1
sin2 θ
15
理论力学
习题课
问题:B 点的运动轨迹?
θ0
=
π
4
=
0.7854,ϕ0
=
0,θ&0
=
0,ϕ&0
=
2.0rad/s
m = 1kg L = 1m k = 10N/m
∂T
∂ϕ&
=
1 mL2 3
sin2 θϕ&
=
C1
2014-3-25
mL&x&cosθ
+
1 mL2θ&&+
3
1 2
mgL sinθ
=
0
2014-3-25
10
理论力学
习题课
x
A
aA
θ&&= −15 2 g,
17L
&x&
=3g 17
求地面的约束力
F
aCt A
北京大学弹性力学讲义
“弹性力学”课程是北京大学力学与工程科学系的主干基础课,三年级开设,一学期的课程,力学班周学时为5,工程班为3。
所谓弹性是指外力消失后,物体恢复原状的特性。
弹性力学是研究弹性体在外界因素影响下,其内部所生成的位移和应力分布的学科。
弹性力学是众多工程学科的基础,此课程十分重要,力学系本科的许多后续课程都建立在弹性力学的基础之上。
授课教案详见王敏中等编著的《弹性力学教程》。
目前网上给出如下一些教案示例:1.“第一章矢量与张量”2.“第二章应变分析”3.“第三章应力分析4.“第六章 Saint-venant 问题” (§1-§5)5.“第七章弹性力学平面问题的直角坐标解法” (§1-§4)弹性――外力消失后,物体恢复原状的特性。
弹性体――仅仅有弹性性质的一种理想物体。
弹性力学――研究弹性体在外界因素影响下,其内部所生成的位移和应力分布的学科。
人类利用物体的弹性可以追溯到无穷久远的年代,但是弹性力学作为一门科学却是伴随着工业革命而诞生的,并被广泛应用于土木、航空、船舶、机械等工程领域。
弹性力学迄今已有三百余年的发展历史,1678年Hooke提出变形与外力成正比的定律,1821年Navier和1823年Cauchy建立了关于应力的平衡方程,形成了弹性力学的初步理论;Saint-Venant(1855)关于扭转与弯曲的解答,Мусхелишвили(1933)的复变解法是弹性理论发展中的经典之作;二十世纪下半叶,弹性理论进一步深化和扩展,许多基本概念和基本问题被深入和细致的研究,并与其它物理因素相互耦合出现了许多交叉领域,诸如热弹性力学、粘弹性力学、磁弹性力学、压电介质弹性力学、微孔介质弹性力学、微极弹性力学、非局部弹性力学、准晶弹性力学等,极大地丰富了弹性力学的研究范围。
本书主要介绍弹性力学的基本理论、典型方法、著名问题、重要结果,希望能反映出这门既古老又年青、既理论又实用的学科的面貌,作为进一步研究弹性力学和固体力学其它分支的起点。
理论力学(Ⅱ)—拉格朗日方程
B
解:以系统为研究对象,系统所 受的主动力有圆柱的重力。设两轮的 角加速度为 1 、 2 ,轮B质心的加速 度为 a 。假想加上惯性力,如图。
1 其中 M mR 21 2
g A
C
2
yC
1 2
mg
g MB
a
2
g FBg ma M B mR 2 2
此系统具有两个自由度,取轮A、轮B的转 角1 、 2 为广义坐标。给系统一组虚位移,如图。
q (q1 , q2 , , q N )
ri ri (q1 , q2 , , qN , t )
由动力学普遍方程,得
F δ r m a δ r 0
i 1 i i i 1 i i i
(m1 m2 ) g m1lcos
2
例题3 质量为m 的三棱柱ABC 1
通过滚轮搁置在光滑的水平面上。 质量为m2、半径为R的均质圆轮沿 三棱柱的斜面AB无滑动地滚下。
求:1、三棱柱后退的加速度a1; 2、圆轮质心C2相对于三棱 柱加速度ar。 解:1、分析运动 三棱柱作平动,加速度为 a1。 y D ae a1 C1
引
言
本章是将达朗伯原理和虚位移原理结合起来 推导出动力学普遍方程和拉格朗日方程。动力学 普遍方程中系统的运动是直角坐标来描述的,而 拉格朗日方程是用广义坐标来描述系统的运动, 两者都是用来解决非自由质点系的动力学问题, 它是用分析的方法解决动力学问题的出发点,因 此它是分析力学的基础。对于解决复杂的非自由 质点系的动力学问题,应用拉格朗日方程往往要 比用动力学普遍方程简便得多。
2 aC g sin 3
0
mgsin x - FIR x M IC
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
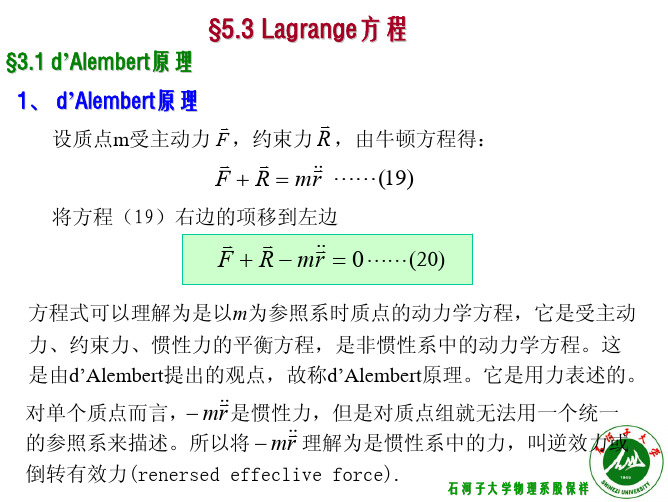
第一章Lagrange 方程本章主要内容§1、约束,自由度和广义坐标§2、虚功原理§3、Lagrange方程在矢量力学中,最基本、最重要的方程是F =m a 。
1、处理运动受到约束(即限制)的力学问题一个质量为m 的质点,受到作用力F 已知,在3维空间中,t d /r md F 22 =这里包含3个标量方程,3个未知数(矢径的3个分量)。
如果这个质点被限制在一个光滑的曲面f (r )=0上运动,f (r )=f (x,y,z )= 0 ,22/,F R md r dt += 在曲面上,df =0,由于曲面光滑,所以曲面对质点的作用力R ∝,ˆn •O •r d rf (r )=0m =0ˆn 矢量力学的不足?运动,运动方程是:方程为:ˆn表示法向单位矢量。
同理,质点约束在光滑的曲线上运动,独立变量减少了2个,但方程和未知量却增加2个。
但在分析力学中,情况却相反,质点的运动受到约束,描述质点运动的独立变量数减少,方程和未知量的个数也随着减少,使求解问题变得更简单。
2、描述质点运动的坐标在F=m a中,r是我们要求解的重要变量,但这种变量的形式太受局限,难于用来描述复杂的物理体系,如电磁场、引力场,更不用说量子体系。
在分析力学中,r被广义坐标取代,这种描述方法可直接推广到电磁场、引力场、量子力学、量子场论,可以用于自然界中的所有4种基本相互作用。
3、作用力F是一个宏观量,在微观世界中没有这个量。
宏观量F与微观世界中的动量变化相联系。
在分析力学中,通常用能量、广义动量这类更基本的物理量,这样便于把分析力学推广到其它领域。
1788年,J. L. Lagrange写了一本名为“分析力学”的书,这就是现在的Lagrange形式的分析力学。
1834年,W. Hamilton 建立了另一种形式的分析力学,就是现在的Hamilton形式的分析力学。
除这两种形式之外,分析力学还被表述为变分形式。
我们现在所说的分析力学主要包括这3种表述形式。
分析力学比较抽象,不像矢量力学那样直观。
在Lagrange的分析力学中,没有一张图。
矢量力学则直观、图像清晰。
§1、约束,自由度和广义坐标1、约束2、广义坐标和自由度数3、举例约束就是对运动的限制。
••m 1m 2刚体上的各个质点穿在刚性的线上的珠子刚性杆连接的两个质点如:•m •••• 1、约束111222,,,,,,,...,,,n n n x y z x y z x y z 一个由n 个质点组成的力学体系,各个质点的位置矢量为:12.,,...,n r r r 分量形式:或表示为:,1,2,...,.a r a n = 或表示为:x 1 ,x 2 ,…,x 3n 。
或:x i ,i =1,2,…,3n.(a, b, c ,… 表示质点编号)(i, j, k,… 表示坐标分量的编号)为简化记号,用x 代替全部3n 个带下标的x i ,等。
约束的数学形式就是约束方程,如:如鱼在水中游的约束方程,就是不等式形式的,以后,我们不讨论这种形式的约束,只限于等式形式的约束。
123123,,,,(,,,,)0,0n n x x t x x f x x 或等,223113,,,,(,,,,)0.n n f x t x x x x x= /i i xdx dt = 这里为第i 个速度分量;等式形式的约束方程如:形式如的方程,不显含时间t ,显含时间t ,这样的约束称为非完整约束。
f ( x , ,t ) =0,x •f ( x ,t ) =0不显含速度,x •f ( x , ,t ) =0x •如果不可能消掉,x •显含速度,如果能消掉,x •x •使其变为f (x ,t )=0形式,形式如使其变为f (x ,t )=0形式,这样的约束称为稳定约束。
称为不稳定约束。
称为完整约束。
仍然是完整约束。
f ( x , ) =0x •上面等式形式的约束方程可以简单的写成:f ( x , ,t ) =0。
x •2、广义坐标和自由度数能完全确定一个力学体系的位置,最少个数的一组变量被称为广义坐标。
广义坐标记为:q 1 ,q 2 ,…,q s 。
或记为:q , =1, 2, …, s 。
, , g,...等表示广义坐标的编号。
从广义坐标的定义看,它们的选取有很大的任意性。
和质点组的位置相联系的长度、角度、面积等都可以作为广义坐标。
选广义坐标一般也不需要坐标系。
•m O l >0 一个体系的独立的速度分量个数称为这个体系的自由度数。
如右图,只要取好零点,规定l 的正方向,l 就是一个广义坐标。
这时,广义坐标个数为:s = 3n -h ,如果一个体系由n 个质点组成,受到h 个独立的完整约束:f 1(x ,t ) =0,…, f h (x ,t ) =0, k 个独立的非完整约束:这里因为每一个独立的完整约束方程都使某一个坐标分量不能独立变化。
每一个独立的非完整约束方程都使某一个速度分量不能独立变化,因此:自由度数为:3n -h -k < s 。
速度分量数就是坐标独立的微分个数,也就是广义坐标独立的无限小变更数。
x g 1(x ,, t ) =0,…,•由于速度分量=dx i /dt ,所以独立的x i •x g k (x ,, t ) =0,•3、举例盘上某一半径与竖直方向的夹角为 ,选该体系的广义坐标。
(1)一个薄园盘限于粗糙的水平面xy 上纯滚动,盘面始终与xy 平面垂直,C x y r t A 盘与xy 平面的接触点为A ,盘可以在xy 平面滚动,C 点(即A 点)的x 、y 坐标可以任意变化,所以取x 、y 为2个广义坐标;可绕CA 转,所以取 ;对x 、y 、 的确定值,不同的 代表园盘不同位置。
x 、y 、 、 确定后,园盘的位置完全固定。
因此,这4个量可取为广义坐标,即s = 4。
盘面过A 的切线为t ,切线与x 轴的夹角为 ,13由于v c = r ,•即cos cos c x v r == cos dx rd =由于、 之间不存在函数关系,所以上式不可能被积分,也就是说,[1]不可能划为f (x,t)=0形式。
所以,[1]为非完整约束。
Cx y r tAO 所以 由[2]得,dx ,dy 完全由广义坐标和d 确定,因此是不独立的,独立的微分个数为2(例如:d 、d )。
所以,这个体系的广义坐标数s = 4, 自由度数d = 2。
从这个例子,我们看到非完整约束只减少自由度数,不影响广义坐标数。
sin sin c y v r == [1]sin dy rd =[2]加上约束条件 =0,(2)在以上问题中,上面的约束方程变为:0x r y = = 即为完整约束形式。
这时,体系又多了2个完整约束方程(蓝色表达式),这时,s = 4-3=1,可取x 或 ,d =s =1。
(3)在(1)中,如果xy 平面不粗糙,x 、y 、 、 将没有任何限制,这时,d =s =4。
一个力学体系的全部约束都是完整的,这个体系就被称为完整约束体系。
0x r x =+0y y =,积分今后,除特别指明外,我们只讨论完整约束。
类似的,一个力学体系的全部约束都是稳定的,这个体系就被称为稳定约束体系。
4、变换方程一个由n 个质点组成的体系,其位置由描述。
或x i ,i = 1,2,…,3n ,联系这两组变量之间的关系式:x i = x i (q 1 ,q 2 ,…,q s ,t)称为变换方程。
q , =1,2,…, s (s ≤3n )= x i (q ,t),i = 1,2,…,3n ,§2、虚功原理1、求和规则2、实位移和虚位移3、虚功、理想约束4、虚功原理5、广义力6、举例1、求和规则在物理学中,我们经常需要求和。
例如:一个体系由n 个质点组成,用a 表示质点的编号,a = 1 , 2 , …, n ,第a 个质点的动量为m a v a ,1.na a a m = v 这类求和在物理学中很多,其中的求和是对变动指标的全部可能值进行,并且被求和的指标在每一项中出现了2次。
因此,可以约定(A. Einstein),在一项中,如果变动指标出现2次或2次以上,就表示对指标的所有可能值求和。
这就是说,m a v a 就表示1.na a a m = v 体系的总动量为:18如果用i 表示体系的质点坐标分量序号,i =1,2,…,3n ,第i 个质点的动量的平方和为:321,n i i p= 用求和规则可表示为:p i p i 。
2211n n a a a a a a m v m v ==固定指标不表示求和,如:m 1v 1 ,p x p x 。
m a v a 2m b v b 2,但不能表示为:m a v a 2 m a v a 2 。
也有时,m a v a 2 只表示第a 项,这时,需要特别说明:“这里的重复指标不表示求和”。
从现在起,变动指标出现2次或2次以上一律表示求和,特别说明除外。
2、实位移和虚位移无限小的实位移记为:d r a 、dx i 。
dq 可理解为广义实位移。
实位移就是我们通常所说的位移,产生在特定的时间间隔内,符合力学规律(包括运动方程、约束条件等)。
力学体系在t 时刻的(无限小)虚位移:体系满足t 时刻约束条件的任意无限小位置变更。
虚位移不一定满足力学规律。
虚位移记为: r a 、 x i 。
对稳定约束, 无限小实位移就是虚位移中的某一个。
对于受到约束的体系,由于约束方程的限制,n 个 r a ,或3n 个 x 是不独立的。
••r d r O t t +dt • rr m q 为广义虚位移。
20对完整约束体系,约束方程的作用只在于 对一个由n 个质点组成的力学体系,第a 个质点受到的作用力为:第a 个质点所受到的主动力(A pplied, or A ctive force)因此,广义坐标本身变化是任意的,即s 个 q 是独立的。
.a a A a R F F =+减少了广义坐标的个数,3、虚功、理想约束Aa F 其中,和分别为a R 和约束力。
主动力和约束力没有明确的界限。
约束力通常有以下2个特点:(1)保持约束存在,没有约束力,约束就消失了。
F Am gF fN图中,F A 为推力,m g 为重力,(2)被动的,随主动力的变化而变化。
N 和F f 分别支撑力和摩擦力。
N 为约束力,F A ,m g 为主动力。
F f 一般也算作约束力。
虚功:当质点产生虚位移时,作用力所做的功称为虚功。
第1个质点有虚位移 r1时,作用力对第1个质点所做的虚功为:W1 = F1 · r1,对整个体系,总虚功为:W= F a· r a,(注意:重复指标a表示求和)。
= F a A· r a +R a· r a 。