自适应控制大作业
自适应控制作业wn
自适应控制仿真作业学号:0901462姓名:王宁自适应控制课后作业一自校正部分1模型参数已知1.1已知条件对象模型: ()()()()()()k z C k u z B z k y z A d ξ111----+= (1-1) 其中 ()1129.01--+=z z A()112.18.0---=zzB2=d()11=-zC输入 ()6=k w广义输出: ()()()d k y z P d k +=+Φ-1 (1-2) 广义理想输出: ()()()()()k u z Q k w z R d k y 11--*-=+ (1-3) 广义误差: ()()()d k y d k d k e +-+Φ=+* (1-4) 1.2求最优预报()()()()()11111------+=zG zz A z F z P z C d(1-5)()()()()()()d k z C k u z B d k y zA ++=+---ξ111(1-6)由(1-5)得:()()()()()11111-------=zG zz P z C z A zF d(1-7)由(1-6)得:()()()()()()()()()d k z C z F k u z B z F d k y z A zF ++=+------ξ111111(1-8)将(1-7)代入(1-8)得:()()()[]()()()()()()()d k z C z F k u z B z F d k y zG zz P z C d++=+---------ξ1111111()()()()()()()()()()()d k z C z F k u z B z F k y z G d k y z P zC ++=-+-------ξ1111111()()()()()()()()()()d k z F z C k u z B z F k y zG d k y zP +++=+------ξ111111(1-9)则最优预报为: ()()()()()()()1111----*+=+Φz C k u z B z F k y zG k d k (1-10)1.3求广义最小方差控制器方法:令最优预报等于广义理性输出,得到广义最小方差控制器 即令()()()()()()()()()()()k u z Q k w z R d k y z C k u z B z F k y zG 111111--*-----=+=+()()()()()()()()()()[]k u z Q k w z R z C k u z B z F k y zG 111111-------=+()()()()[]()()()()()()k y z G k w z R z C k u z Q z C z B z F 1111111--------=+ (1-11)1.4闭环系统稳定性分析:由(1-11)得:()()()()()()()()()()1111111-------+-=z Q z C z B z F k y z G k w z R zC k u (1-12)将(1-12)代入(1-1)得:()()()()()()()()()()()()()()()()()d k z A z Q z B z P z Q z C z B z F k w z A z Q z B z P z R zB d k y +++++=+--------------ξ11111111111111(1-13)为保证闭环稳定,消除跟踪误差 需满足两个条件:其一,()()()()1111----+z A z Q z B z P 稳定 其二,()k w 到()k y 的传递增益为1为此,可选择不加积分器的方法确定()1-z P 和()1-z Q 值 选择()11=-zP ()λ=-1z Q 离线选择()()1z 011≥≠+--z A zB λ (1-14)并使得()()()()()()()()()()()1111111111111=+=+=------A P B R B z A z Q z P z B z R zB z λ即 ()()()()1111B A P R λ+= (1-15)1.5计算将已知条件: ()1129.01--+=zzA ()112.18.0---=zzB2=d()11=-zC代人(1-15),选择1=λ,代入得系统的闭环特征方程()()029.012.18.011=++---z z ,解得闭环特征根1505.0<=z 系统是稳定的。
哈工大自动控制原理大作业
自动控制原理大作业1.题目在通常情况下,自动导航小车(AGV )是一种用来搬运物品的自动化设备。
大多数AGV 都需要有某种形式的导轨,但迄今为止,还没有完全解决导航系统的驾驶稳定性问题。
因此,自动导航小车在行驶过程中有时会出现轻微的“蛇行”现象,这表明导航系统还不稳定。
大多数的AGV 在说明书中都声明其最大行驶速度可以达到1m/s ,但实际速度通常只有0.5m/s ,只有在干扰较小的实验室中,才能达到最高速度。
随着速度的增加,要保证小车得稳定和平稳运行将变得越来越困难。
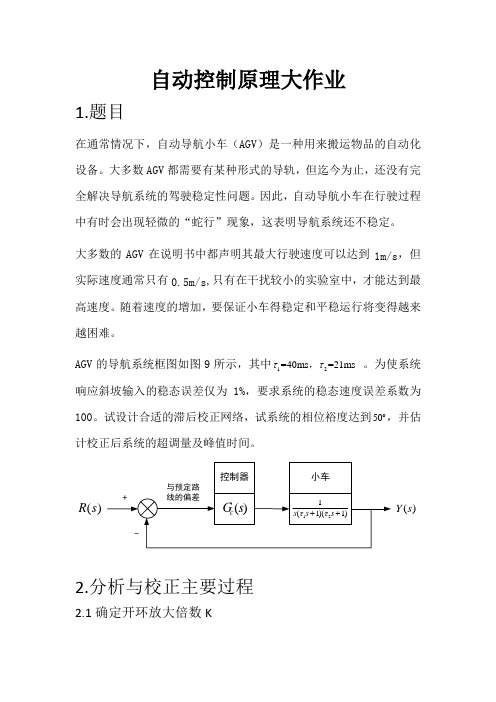
AGV 的导航系统框图如图9所示,其中12=40ms =21ms ττ, 。
为使系统响应斜坡输入的稳态误差仅为1%,要求系统的稳态速度误差系数为100。
试设计合适的滞后校正网络,试系统的相位裕度达到50 ,并估计校正后系统的超调量及峰值时间。
()R s ()Y s2.分析与校正主要过程2.1确定开环放大倍数K100)1021.0)(104.0(lim )(lim =++==s s s sK s sG K v (s →0) 解得K=100)1021.0)(104.0(100++=s s s G s 2.2分析未校正系统的频域特性根据Bode 图:穿越频率s rad c /2.49=ω相位裕度︒---=⨯-⨯--=99.18)2.49021.0(arctan )2.4904.0(arctan 9018011γ 未校正系统频率特性曲线由图可知实际穿越频率为s rad c /5.34=ω2.3根据相角裕度的要求选择校正后的穿越频率1c ω现在进行计算:︒︒︒--=+=---55550)021.0(arctan )04.0(arctan 901801111c c ωω则取s rad c /101=ω可满足要求2.4确定滞后校正网络的校正函数 由于11201~101c ωω)(=因此取s rad c /110111==ωω)(,则由Bode 图可以列出 40)1lg(20)1lg(40)110lg(2022+=+ωω 解得s rad /1.02=ω于是1.0=β 则滞后网络传递函数为1101)(++=s s s G c ,10=T 2.5验证已校正系统的相位裕度已校正系统的开环传递函数为:)110)(1021.0)(104.0()1(100)()(++++=s s s s s s G s G c 相位裕度︒----=-⨯-⨯-+-=2.51)100(arctan )10021.0(arctan )1004.0(arctan )10(arctan 901801111γ校正后的相位裕度大于50°,满足设计要求。
自适应控制大作业
自适应控制结课作业班级:组员:2016年1月目录1 遗忘因子递推最小二乘法 (1)1.1最小二乘理论 (1)1.2带遗忘因子的递推最小二乘法 (1)1.2.1白噪声与白噪声序列 (1)1.2.2遗忘因子递推最小二乘法 (2)2.2仿真实例 (3)2 广义最小方差自校正控制 (5)2.1广义最小方差自校正控制 (5)2.2仿真实例 (6)3 参考模型自适应控制 (9)3.1参考模型自适应控制 (9)3.2仿真实例 (12)3.2.1数值积分 (12)3.2.2仿真结果 (12)参考文献 (16)1 遗忘因子递推最小二乘法1.1最小二乘理论最小二乘最早的想法是高斯在1795年预测行星和彗星运动轨道时提出来的,“未知量的最大可能的值是这样一个数值,它使各次实际观测和计算值之间的差值的平方乘以度量其精确度的数值以后的和为最小”。
这一估计方法原理简单,不需要随机变量的任何统计特性,目前已经成为动态系统辨识的主要手段。
最小二乘辨识方法使其能得到一个在最小方差意义上与实验数据最好拟合的数学模型。
由最小二乘法获得的估计在一定条件下有最佳的统计特性,即统计结果是无偏的、一致的和有效的。
1.2带遗忘因子的递推最小二乘法1.2.1白噪声与白噪声序列系统辨识中所用到的数据通常含有噪声。
从工程实际出发,这种噪声往往可以视为具有理想谱密度的平稳随机过程。
白噪声是一种最简单的随机过程,是由一系列不相关的随机变量组成的理想化随机过程。
白噪声的数学描述如下:如果随机过程()t ξ均值为0,自相关函数为2()σδτ,即2()()R ξτσδτ=式中,()δτ为单位脉冲函数(亦称为Dirac 函数),即,0()0,0τδττ∞=⎧=⎨≠⎩,且-()1d δττ∞∞=⎰ 则称该随机过程为白噪声,其离散形式是白噪声序列。
如果随机序列{}()V k 均值为零,且两两互不相关,即对应的相关函数为:2,0()[()()]0,0v n R n E v k v k n n σ⎧==+=⎨=⎩则这种随机序列称为白噪声序列。
自适应控制课程总结及实验
自适应控制一、课程综述1. 引言传统的控制理论中,当对象是线性定常、并且完全已知的时候,才能进行分析和控制器设计。
无论是采用频域方法还是状态空间方法对象一定是已知的。
这类方法称为基于完全模型的方法。
在模型能够精确的描述实际对象时,基于完全模型的控制方法可以进行各种分析、综合,并得到可靠、精确和满意的控制效果。
因此,在工程中,要成功设计一个良好的控制系统,不论是通常的反馈控制系统或是最优控制系统,都需要掌握好被控系统的数学模型。
然而,有一些实际被控系统的数学模型是很难事先通过机理建模或离线系统辨识来确知的,或者它们的数学模型的某些参数或结构是处于变化之中的。
对于这些事先难以确定数学模型的系统,通过事先鉴定好控制器参数的常规控制难以应付。
面对这些系统特性未知或经常处于变化之中而无法完全事先确定的情况,如何设计一个满意的控制系统,使得能主动适应这些特性未知或变化的情况,这就是自适应控制所要解决的问题。
2. 自适应控制的原理自适应控制的定义:(1)不论外界发生巨大变化或系统产生不确定性,控制系统能自行调整参数或产生控制作用,使系统仍能按某一性能指标运行在最佳状态的一种控制方法。
(2)采用自动方法改变或影响控制参数,以改善控制系统性能的控制。
自适应控制的基本思想是:在控制系统的运行过程中,系统本身不断的测量被控系统的状态、性能和参数,从而“认识”或“掌握”系统当前的运行指标并与期望的指标相比较,进而做出决策,来改变控制器的结构、参数或根据自适应规律来改变控制作用,以保证系统运行在某种意义下的最优或次优状态。
按这种思想建立起来的控制系统就称为自适应控制系统。
自适应控制是主动去适应这些系统或环境的变化,而其他控制方法是被动地、以不变应万变地靠系统本身设计时所考虑的稳定裕度或鲁棒性克服或降低这些变化所带来的对系统稳定性和性能指标的影响。
好的自适应控制方法能在一定程度上适应被控系统的参数大范围的变化,使控制系统不仅能稳定运行,而且保持某种意义下的最优或接近最优。
自适应控制例题
其物理意义为: 其物理意义为:单位时间炉温升高所用的热量等于 单位时间内流入炉子热量与流出炉子热量之差。 单位时间内流入炉子热量与流出炉子热量之差。 其中: 其中:
C − −炉子热容量; 炉子热容量; y − −炉温; 炉温; qs − −单位时间内流出炉子的 热量; 热量; a − −散热系数; 散热系数; q − −单位时间内流入炉子的 热量, q = K1u 热量, u − −控制量(如电热炉的加 热功率) 控制量( 热功率) K1 − −系数
练
习
题
某种合金的含铅量百分 比(%)为 p,其溶解温度 0 C 为 θ,由实验测得 p 与 θ 的数据如下表 :
p%
36.9 181
46.7
197
63.7 235
77.8 270
84.0
283
87.5 292
θ 0C
试用最小二乘法建立 θ 与 p 之间的经验公式 θ = ap + b.
习题1 习题
试根据上面的试验数据建立 y 和 t 之间的经验公 式 y = f (t ).
解 首先确定 f (t ) 的类型.y 的类型. 如图, 如图,在坐标纸上画出 这些点, 这些点, 观察可以认为 y = f (t ) 是 线 性 函 数 ,
并设 f ( t ) = at + b, 其中
27
26
25
a 和 b 是待定常数. 是待定常数.
T p [ y (t1 ) − y (t 2 )] + h∑ y (ih) = K p h∑ u (ih)
式中
t2 i = t1 t2 1
t2
t2
(1)
i =t1
i =t1
∑ y (ih) − −时刻 t 至时刻 t 所有输出采样数据之和 ;
系统辨识与自适应控制作业
一、系统辨识部分1、SISO 系统作为仿真对象)()2(5.0)1()2(7.0)1(5.1)(k e k U k U k Z k Z k Z +-+-=-+--二阶的离散的,其中{e(k)}为服从N(0,1)分布的白噪声序列;输入信号)(k U 采用四阶逆重复m 序列,其中幅值为1,数据信噪比β=14.3% 选择的辨识模型为:)()2(5.0)1()2()1()(2121k k U b k U b k Z a k Z a k Z ε+-+-=-+--用最小二乘估计的一次性完成算法和LS 递推算法分别估计参数,选取数据长度480=l ,选取的初始值⎩⎨⎧==⨯226010p 001.0Q I (遗忘因子μ=0.995)。
解:最小二乘估计的一次性完成算法程序代码:clear clc%-----产生M 序列输入信号--------------------- l=480;y1=1;y2=1;y3=1;y4=0; for i=1:l;x1=xor(y3,y4);x2=y1;x3=y2;x4=y3;y(i)=y4; if y(i)>0.143,u(i)=-1; else u(i)=1; endy1=x1;y2=x2;y3=x3;y4=x4; endfigure(1);stem(u) grid ontitle('输入信号')%-----产生白噪声信号------- A=19;x0=12;M=500; for k=1:l x=A*x0;x1=mod(x,M); v(k)=x1/512; x0=x1; endfigure(2);stem(v) title('白噪声信号')z=zeros(479,1);z(2)=0;z(1)=0;w=0.995;l=477;for k=3:479;z(k)=1.5*z(k-1)-0.7*z(k-2)+u(k-1)+0.5*u(k-2)+v(k);zstar(k)=z(k)*w^(l-k+2);endH=zeros(477,4);for k=1:477H(k,1)=-z(k+1)*w^(l-k);H(k,2)=-z(k)*w^(l-k);H(k,3)=-u(k+1)*w^(l-k);H(k,4)=-u(k)*w^(l-k);endestimate=inv(H'*H)*H'*(zstar(3:479))'辨识结果:estimate =-1.53760.6938-0.9780-0.4565最小二乘估计的递推算法的程序元代码:clearclc%-----产生M序列输入信号---------------------l=480;y1=1;y2=1;y3=1;y4=0;for i=1:l;x1=xor(y3,y4);x2=y1;x3=y2;x4=y3;y(i)=y4;if y(i)>0.143,u(i)=-1;else u(i)=1;endy1=x1;y2=x2;y3=x3;y4=x4;endfigure(1);stem(u)grid ontitle('输入信号')%-----产生白噪声信号-------A=19;x0=12;M=500;for k=1:lx1=mod(x,M);v(k)=x1/512;x0=x1;endfigure(2);stem(v)title('白噪声信号')z=zeros(479,1);z(2)=0;z(1)=0;for k=3:479;z(k)=1.5*z(k-1)-0.7*z(k-2)+u(k-1)+0.5*u(k-2)+v(k); endP=10^6*eye(4,4);e=zeros(4,478);e(:,1)=[P(1,1),P(2,2),P(3,3),P(4,4)];c=zeros(4,478);c(:,1)=[0.001 0.001 0.001 0.001]';K=[10;10;10;10];w=0.995;for k=3:479;h=[-z(k-1),-z(k-2),u(k-1),u(k-2)]';K=P*h*inv(h'*P*h+w);c(:,k-1)=c(:,k-2)+K*(z(k)-h'*c(:,k-2));P=(eye(4)-K*h')*P/w;e(:,k-1)=[P(1,1),P(2,2),P(3,3),P(4,4)];enda1=c(1,:);a2=c(2,:);b1=c(3,:);b2=c(4,:);ea1=e(1,:);ea2=e(2,:);eb1=e(3,:);eb2=e(4,:);figure(3);i=1:478;plot(i,a1,'r',i,a2,'y:',i,b1,'g',i,b2,':')title('最小二乘递推算法辨识曲线')axis([0,500,-2,2])figure(4);i=1:478;plot(i,ea1,'r',i,ea2,':',i,eb1,'g',i,eb2,':')title('最小二乘递推算法辨识误差曲线')axis([0,500,0,10])-2-1.5-1-0.500.511.52最小二乘递推算法辨识曲线012345678910二、自适应控制部分1、设有二阶系统,1)(122++=s a s a s D ,1)(=s N 。
自适应控制大作业
《自适应控制》大作业学院:电气与自动化工程学院姓名:学号: 20专业:控制科学与工程使用自适应控制的数控加工状态监测摘要:在这项工作中,已经开发了一种用于计算机数控(CNC)车削的自适应控制约束系统基于反馈控制和自适应控制/自整定控制。
在自适应控制系统中,来自在线的信号必须进行测量,并将其反馈给机床控制器,以调整切削参数以进行加工一旦达到某个阈值,就可以停止。
本工作的重点是开发可靠的自适应控制系统,控制系统的目标是控制切削参数,保持位移和刀具磨损。
使用Matlab 仿真,数字适应的实验切割参数已经确定了自适应控制状态监测系统的效率在不同的加工条件下,在不同的加工过程中被重新定义。
这项工作描述了自适应技术控制约束(ACC)加工系统的现状。
使用150 BHN硬度的AISI4140钢作为工件材料,硬质合金刀片在整个实验中都被用作刀具材料。
通过开发的方法,可以预测,如果在相同条件下测量进给和表面粗糙度,工具条件相当准确。
研究了由于振动引起的位移、切割力、磨损和表面粗糙度之间的关系。
关键词:自适应控制,状态监测,基于模型的控制系统和角度磨损,表面粗糙度,位移。
1引言状态监测在工业中越来越受欢迎,因为它在检测潜在故障方面起了很好的作用。
一般情况监测技术的使用提高工厂的生产可用性并减少停机时间成本。
可靠的自适应控制系统可以防止机器的停机或避免不必要的条件,例如震动,刀具磨损过大,刀具使用寿命。
在金属切割运动中,工件的表面将考虑切割参数、切割力等等。
但振动的影响较少受到关注。
Prasad 等人提出了一个监控系统,由快速傅里叶组成变换预处理器,用于从线上生成特征声光发射(AOE)信号来开发数据库作出适当的决定。
快速傅里叶变换(FFT)可以将AOE信号分解成不同频带在时域。
这种方法也很广泛用于金属切割,检测过程变化由于振动、工具磨损等而发生位移。
现代计算机数控(CNC)系统的缺点是加工参数,如进给速度,速度和切割深度,都被线性编程。
第三讲_自适应控制
第三讲 自适应控制3.1自适应控制自适应控制也是一种鲁棒控制方法,前面所讲的所有鲁棒控制(包括变结构控制),它们的基本思想是基于被控对象与内环控制的不匹配及不确定性的最坏情形的估计而展开设计的,它们的内环控制律是固定的,外环控制增益根据不确定性的估计来设定;而自适应控制的基本思想是根据一些在线算法改变控制律中的增益值或其他参数,控制器在操作过程中“学得”一套合适的参数。
自适应控制尤其适合于机器人这种执行重复的作业任务的场合,通过不断的重复,自适应控制可以改善跟踪性能。
根据设计技术不同,机器人自适应控制分为三类,即模型参考自适应控制(MRAC )、自校正自适应控制(STAC)和线性摄动自适应控制。
其控制器结构图如图5-4所示。
图5-4 自适应控制器的基本结构3.2基于逆动力学的自适应控制本节主要讨论自适应控制在机器人控制问题上的应用。
刚性机器人适于自适应控制的一个关键特征是参数线性。
也就是说,虽然运动方程是非线性的,但如果把方程系数中连杆质量,惯性矩等参数分离出来却可以得到线性的关系,n 个连杆的刚性机器人动力学方程可以写成u p q q q Y q g q q q C qq M ==++),,()(),()( (5-1) 式中,),,(q qq Y 是n ×r 维矩阵;p 是r 维参数向量。
机器人界的学者在20世纪80年代中期得到了这一结果,随之第一个全局收敛的自适应控制律也出现了,这些自适应控制律的结果都是基于逆动力学展开的。
首先,系统动力学方程为 u p q q q Y q g q q q C qq M ==++),,()(),()( (5-2) 逆动力学控制律为ˆˆˆ()(,)()qu M q a C q q q g q =++ (5-3) 其中10()()d d dq a q K q q K q q =---- (5-4)- 57 -d q 是理想的轨迹,d q qe -=是位置跟踪误差。
自适应控制广义预测控制大作业
自适应控制作业一、题目:受控对象的数学模型为1p p K x x uTT∙=-+(T 、K 未知)其中,px 、u ——系统的状态和控制量选定参考模型1133mm x x r∙=-+,m x 、r ——参考模型的状态和系统的输入。
选用模型参考自适应控制方法,求py 、m y 、前馈增益和反馈增益的波形。
解:1、一阶模型参考自适应控制框图:前馈增益:()0c t 参考模型输出:m y 反馈增益:()0d t 被控对象输出:py输出误差:0p m ey y =-控制信号:()()()()()00p u t c t r t d t y t =+2、一阶自适应控制系统结构图对象和模型的时域描述如下:1()()()()p p p p p K y a y t k u t y t u t T T ∙=-+=-+11()()()()33mm m m m y a y t k r t y t r t ∙=-+=-+选择如下控制规律:()()()()()00p u t c t r t d t y t =+,其中()0c t 和()0d t 是时变反馈增益。
闭环系统为0000()()()()()()[()]()()()p p p p p p p p p p y t a y t k c t r t k d t y t a k d t y t k c t r t ∙=-++=--+当*001()3m ppk c t c k k ===,*0031()3p mp ppa a a d t d k k --===1()()()()11()()()()33p p p p p m m m m m K y a y t k u t y t u t TTy a y t y r t y t r t ∙∙=-+=-+==-+=-+若取11/2255/2p pk s a s s ==+++,那么12pk=,52p a =,则*01233pc k ==,*311333p pa d k -==3、SMULINK 框图4、仿真图形与结果◆输入信号为阶跃信号() 1.0, 1.0r t steptime ==时图1 误差0e 的输出曲线 图2 m y 、py 的输出曲线12345678910图3 前馈增益()c t 输出曲线 图4 反馈增益()d t 输出曲线二、设对象用下面的CARMA 模型描述:120112()(1)(2)(2)(3)()(1)(2)w w w y k a y k a y k b u k b u k e k c e k c e k +-+-=-+-++-+-式中()w e k 是方差为2wσ的零均值白噪声,121212,,,,,a a b b c c 未知并有缓慢时变,试设计一个最小方差控制器。
自动控制大作业
自适应控制综述摘要:随着计算机技术的发展,自适应控制无论是在理论上还是在应用上都取得了很大的进展,自适应控制已成为一个极其活跃的研究领域,为人类的生产和生活做出了巨大的贡献。
关键词:自适应控制;收敛性;鲁棒性;系统参数一、 自适应控制意义和背景在反馈控制和最优控制中,都假定被控对象或过程的数学模型是已知的,并且具有线性定常的特性。
实际上在许多工程中,被控对象或过程的数学模型事先是难以确定的,即使在某一条件下被确定了的数学模型,在工况和条件改变了以后,其动态参数乃至于模型的结构仍然经常发生变化。
当对象的数学模型在小范围内变化,可用一般的反馈系统、最优控制或补偿控制等方法来消除或参数变化对控制品质的影响。
如果控制对象的参数在大范围内变化,上面这些方法不能圆满地解决问题了。
为此,需要设计一种特殊的控制系统,它能够自动地补偿在模型阶次、参数和输入信号方面大范围的非预知的的变化,这就是自适应控制。
早在20世纪50年代,由于高性能的飞机自动驾驶仪控制的需要,人们就对自适应控制进行了广泛的研究,美国麻省理工学院怀特克教授首先提出了模型参考自适应控制思想,正式提出了自适应控制理念。
自适应控制是指能自动地适时地调节系统本身控制规律的参数,以适应外界环境变化、系统本身参数变化、外界干扰的影响,使整个控制系统能按某一性能指标运行在最佳状态的系统。
自适应控制系统原理图y (t )二、自适应控制的历史发展自适应控制首先由Draper和Li在1951年提出,他们介绍了一种能是性能特性不确定的内燃机达到最优性能的控制系统。
自适应这类名词是1954年由Tsien在《工程控制论》一书中提出的。
其后,在1955年Benner和Drenick也提出一个控制系统具有的“自适应“的概念。
自适应控制发展的重要标志是在1958年Whitaker及其同事设计了一种自适应飞机飞行系统。
1960年Li和Van Der Velde提出的自适应控制系统,他的控制回路中用一个极限环使参数不确定性得到了自动补偿,这样的系统称为自振荡的自适应系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.1、Analyze the stability of the system 321121.x x x x =-+ ,22122.2x x x x =-- (use aLyapunov function candidate 212()2V x x x =+)。
解:32112122122..2x x x x x x x x ⎧=-+⎪⎨⎪=--⎩ 显然,120x x ==是系统的唯一的平衡态。
又由于,212()2V x x x =+; 所以,[]32421211212122112212122.()()()()()42(42.)2.x x x x x dx dx V x V x V x V x V x x x x x x dt x dt x x x x x ⎡⎤⎡⎤⎢⎥⎡⎤-+∂∂∂∂=+===-+⎢⎥⎢⎥⎢⎥∂∂∂∂--⎣⎦⎣⎦⎢⎥⎣⎦由上可知,()0V x ≥,等号仅在0x =时成立;当0x ≠时,.()0V x <, 且当x →∞时,()V x →∞。
所以,系统的原点平衡状态是大范围渐进稳定的。
3.2As an application of the result in Problem 3.1, let us considerthe stability of the system 00.()(,)()x A t x g x t x t x =+=, ,where (),(,)n n n A t R g x t R ⨯∈∈are continuous. Show thatif the equilibrium state 0e x =of the unperturbed linear system .()x A t x =is uniformly asymptotically stable and 0(,)(),,n g x t t x t t x R γ≤∀≥∀∈(which implies 0(0,)0,g t t t =∀≥) for some continuous function 0()0,t t t γ≥∀≥such that 21210()()t t t dt t t γνγ≤-+⎰where 00,0γν≥≥, then there exists a *0ν>such that for any)*0,νν⎡∈⎣, the equilibrium state 0e x =of the perturbed system .()(,)x A t x g x t =+isuniformly asymptotically stable. (Hint: use0()(,)(,)((),)t t x t t t t g x d ττττ=Φ+Φ⎰and ()(,)t t e αττβ--Φ≤, for some 00,0,t t βατ>>∀≥≥.)证明:由题可知,.()x A t x =,在0e x =是一致渐进稳定的则存在一个与0t 无关的T ,使得,当000(),x t t t T δ<≥+时,有000()(,)x t t t x ε≤Φ<,且0lim (,)0t t t →∞Φ=。
当系统为.()(,)x A t x g x t =+时,系统的解如下:000()(,)(,)((),)tt x t t t x t g x d ττττ=Φ+Φ⎰所以,000000()(,)(,)((),)(,)(,)((),)tt t t x t t t x t g x d t t x t g x d ττττττττ=Φ+Φ≤Φ+Φ⎰⎰000000(,)(,)((),)(,)(,)((),)t tt t t t x t g x d t t x t g x d ττττττττ≤Φ+Φ≤Φ+Φ⎰⎰ 由于,()(,)t t e αττβ--Φ≤,(,)()g x t t x γ≤,21210()()t t t dt t t γνγ≤-+⎰ 所以,00()()0()()()tt t t t x t e x e x d αατββγτττ----≤+⎰ 又由于000()(,)x t t t x ε≤Φ< 所以,00000()(1())(1())t t x t d t t εγττενγ≤+≤+-+⎰,则系统是稳定的。
而,)*0,νν⎡∈⎣,当0ν=时,令00(1)εεγ=+,则()x t ε≤,ε与0t 无关,并且0lim (,)0t t t →∞Φ=,所以系统.()(,)x A t x g x t =+是一致渐进稳定的。
4.2 Consider the system ()00[]()()s p y t z u t +=with 0(0)0,0y z =≠and 00p >()i Design a least squares estimator for the parameters 00,z p ;()ii design a gradient estimator for the parameters 00,z p ;()iii show that for ()sin(),0u t t t =∀≥the estimated parameters converge to the true ones as t goes to infinity for any initial estimates (hint: use the definition of persistently exciting signals to show that in this case the signal ()t φis persistently exciting);()iv simulate both the gradient and least squares estimators with 001,2z p ==for (a)()1u t = and ()()sin()b u t t =, and plot the parameter errors for (0)(1,1)Tθ=; ()v comment on the simulation results.解:(1)、由题可知,系统为00()()()s p y t z u t +=,取为0()s s λΛ=+所以,*000(,)T z p θλ=-,11()((),())()()T t u t y t s s φ=ΛΛ,~~*()()()()()(),()()T T t t t y t t t t t εθφθφθθθ=-==- 其最小二乘法估计器为:~~0002..()()()()()(),(),()TP t t t t t t t t t m t φθφθθθθ==-=≥ 其中00002.()()()()(),(),()T T P t t t P t P t P t P P t t m t φφ=-==≥ 且2()1()()()()(),0,0T T m t t t t P t t αφφβφφαβ=++>>(2)、由(1)可知*000(,)T z p θλ=-,11()((),())()()T t u t y t s s φ=ΛΛ ~~*()()()()()(),()()T T t t t y t t t t t εθφθφθθθ=-==-, 其梯度估计器为,~~0002..()()()()(),(),()Tt t t t t t t t m t φθφθθθθΓ==-=≥,且2()1()(),0T m t t t αφφα=+>,其中Γ是矩阵增益常数。
(3)、因为()sin()u t t =有121,1ωω==-两个频率值,而本系统中12n m ++=,所以()x φ是持续激励的信号。
并且()t L φ∞∈,所以()()()t t m t φψ=也是持续激励的信号。
对于梯度算法或者最小二乘算法,都有2lim ()0t t θ→∞= ,即*lim ()t t θθ→∞=。
(4)、梯度估计器:01,1,15I αλ==Γ=(a )、z 0 = 1, p 0 = 2 ,u (t ) = 1,梯度估计器的最终的结果曲线如图1所示。
图1 u=1时梯度估计器的误差曲线(b )、z 0 = 1, p 0 = 2 ,u (t ) = sin(t),梯度估计器的最终的结果曲线如图2所示。
图2 u=sin(t)时梯度估计器的误差曲线最小二乘估计器:01,1,1,15I αβλ===Γ=a )、z 0 = 1, p 0 = 2 ,u (t ) = 1,最小二乘估计器的最终的结果曲线如图3所示。
图3 u=sin(t)时最小二乘估计器曲线图(b)、z0 = 1, p0 = 2 ,u(t) = sin(t),最小二乘估计器的最终的结果曲线如图4所示。
图4 u=sin(t)时最小二乘估计器曲线图(5)通过MATLAB实验仿真得到上述几个图形,当u=1时,对比图1与图3发现两个估计器的效果类似,最小二乘估计器的曲线有小量的波动,二者趋向于0的时间都一样;当u=sin(t)时,对比图2和图4发现最小二乘估计器的效果比较好,曲线波动少,误差趋向0的速度明显比梯度估计器的快。
5.3 Consider the system .()()(),()()x t Ax t Bu t y t Cx t =+=,with 013101011A -⎡⎤⎢⎥=-⎢⎥⎢⎥-⎣⎦,100B ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦[100]C =The system transfer function is 232122s s s s s ++++-. Assume the system parameters are all unknown.()i Verify or specify the conditions needed for the design of a model reference adaptive controller in Section 5.5;()ii design a model reference adaptive controller for this system;and()iii simulate the adaptive control system with r (t ) = 1, sin(t ) and sin(t )+2sin(2t ), respectively, and plot both the tracking error and parameter errors.(1)解:参考模型自适应控制器需要三个条件:a :()Z s 为稳定的多项式,可以保证()y t 跟踪()m y t ,也说明(,,)A B C 是稳定的和可检测的。