EV TX系列介绍
事件管理器(EV)
第11章事件管理器(EV)事件管理器模块为用户提供了众多的功能和特点,它们在运动控制和马达控制的应用中是特别有用的。
事件管理器模块包括通用目的(GP)定时器、全比较/PWM单元、捕捉单元和正交编码脉冲电路等。
EVA和EVB两个EV模块都是特定的外围设备,它们是为多轴运动控制应用而设计的。
每个EV都具有控制三个半高桥(three Half-H bridges)的能力,当各个桥需要互补的PWM对去控制时,EV 可以提供这种能力。
每个EV还可以输出两个附加的PWM,而不是互补的PWM对输出。
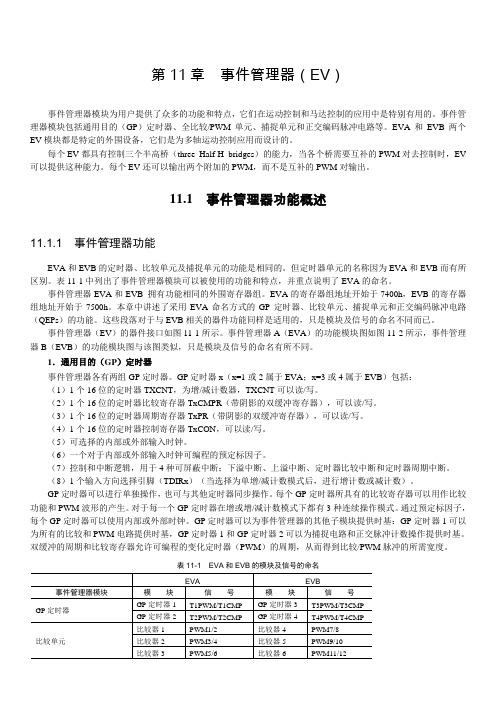
11.1 事件管理器功能概述11.1.1 事件管理器功能EVA和EVB的定时器、比较单元及捕捉单元的功能是相同的。
但定时器单元的名称因为EVA和EVB而有所区别。
表11-1中列出了事件管理器模块可以被使用的功能和特点,并重点说明了EVA的命名。
事件管理器EVA和EVB 拥有功能相同的外围寄存器组。
EVA的寄存器组地址开始于7400h,EVB的寄存器组地址开始于7500h。
本章中讲述了采用EVA命名方式的GP定时器、比较单元、捕捉单元和正交编码脉冲电路(QEPs)的功能。
这些段落对于与EVB相关的器件功能同样是适用的,只是模块及信号的命名不同而已。
事件管理器(EV)的器件接口如图11-1所示。
事件管理器A(EVA)的功能模块图如图11-2所示,事件管理器B(EVB)的功能模块图与该图类似,只是模块及信号的命名有所不同。
1.通用目的(GP)定时器事件管理器各有两组GP定时器。
GP定时器x(x=1或2属于EVA;x=3或4属于EVB)包括:(1)1个16位的定时器TXCNT,为增/减计数器,TXCNT可以读/写。
(2)1个16位的定时器比较寄存器TxCMPR(带阴影的双缓冲寄存器),可以读/写。
(3)1个16位的定时器周期寄存器TxPR(带阴影的双缓冲寄存器),可以读/写。
(4)1个16位的定时器控制寄存器TxCON,可以读/写。
AOMWAY 奥姆威科技 TX004 系列图传 Mini_TX004 产品说明书

TX004系列图传概述TX004 系列图传为5.8G ISM频段模拟图传,具有输出功率稳定、传输距离远、电源滤波强,能保证图像在最大油门下无雪花、无横纹等特点。
不仅于此,TX004系列图传还具备遥控器OSD界面远程控制、开机瞬间不干扰同伴,以及支持8人以上同时飞行的超强功能。
Mini_TX004产品说明性能特点:●输出功率稳定,传输距离远:≥0.5km@25mW,≥0.8km@100mW,≥1km@200mW(原装天线);●发射功率4挡切换:0mW/25mW/100mW/200mW;●输出64频点,并拥有E组8个竞赛频点同时使用相互无干扰;●频率锁定快、开机不干扰同伴;●自带输出功率自检功能;●全制式视频格式:NTSC /PAL ;●输入电压范围广,功耗低:7V~24V,+12V/170mA@200mW;●体积小:27mm×27mm×4.5mm,安装孔20mm×20mm(4-M3);●重量轻:≤3g(不包含天线);性能指标:接口说明:频率及功率控制方法:●支持BF固件OSD调整频率和功率,其中PIT模式为0mw,用于近距离调机用。
●按键控制:频率调整:短按一次,更改频道数CH(CH1-CH8);频组选择:长按按键2秒(FR蓝灯闪烁)进入频组切换模式,然后短按按键更改频率组FR(A-F);功率调整按键功率控制:长按按键10秒(LED灯如下图所示显示)进入功率切换模式,然后短按按键更改功率等级25mw/100mw/200mw;●频率表:使用意事项:●加电前确定输出端已安装天线,以免损坏内部元件;●注意输入电压在规定范围内且正负无误,以免损坏内部元件;●如果更换天线请选择驻波和增益好的天线以获得较远的传输距离;●转运及安装使用过程中注意静电防护;。
HGP 规格表参数说明
技密AA(工场) HGP(EV-ECD03系统)规格表参数说明第1页共28页阅 读 说 明HGP电梯EV-ECD03微机所用的规格表参数ROM地址的范围为30010-31FFF,其中30010-3050F为定时器设定区,30718-30937为IO变量设定区,30E28-3106B为群控变量设定区;RAM地址为112000—1143B8,其中112000—1124FF为定时器设定区,112708—112927为IO变量设定区,112E18-11305B为群控变量设定区。
1.参数说明中代号说明:“k**”表示其对应数据寄存器的数据是以十进制方式表示,具体数值根据不 同的设定而不同。
“H**”表示其对应数据寄存器的数据是以十六进制方式表示,具体数值根据 不同的设定而不同。
“有功能”是指电梯具有某特定功能时数据寄存器的设定值。
“无功能”是指电梯不设定某特定功能时数据寄存器的设定值。
“------”是指设定数据寄存器参数时不需要考虑电梯是否具有某特定功能。
2.备注说明:“已取消”表示该变量在程序中未使用,该变量在程序中无意义。
“未使用”表示该变量在程序中有使用,但是其功能未体现,属可扩展功能用。
3.计算公式中符号说明:I为曳引比。
D为绳轮直径(mm)。
N为旋转编码器脉冲数。
4.群控部分参数可参考FI-3、FI-4群控说明,图册16500220~222《微机回路图数据表》,相同名称参数定义相同。
5.本规格表说明用于指引HGP电梯B1003701版程序,HGP电梯其它版本程序仅作参考用。
6.GHP修改规格表数据方法,直接修改RAM地址即可。
其中,注意通过查表找到相应功能位的RAM地址,然后在RAM地址的基础上加上7010的地址偏移量,即为真正修改该功能位的规格表地址。
例如:要开通h15sw功能位,通过下表查出其对应的RAM地址为11126C,那么用GHP修改该功能位时,应该输入的地址为11827C。
发至:设计类文档接收组(电气) [√]; 设计类文档接收组(机械) [ ]; 设计类文档接收组(机电一体化) [ ]; 其他:发至:设计类文档接收组(电气) [√]; 设计类文档接收组(机械) [ ]; 设计类文档接收组(机电一体化) [ ]; 其他:说 明变量名 地址(ROM) 地址(RAM)有功能无功能内 容spechd(0) 30000 ------ ------ H0 和数计算开始地址,H30000 spechd(1) 30001 ------ ------ H3 和数计算开始地址,H30000 spechd(2) 30002 ------ ------ H0 和数计算开始地址,H30000 spechd(3) 30003 ------ ------ H0 和数计算开始地址,H30000 spechd(4) 30004 ------ ------ H0 和数计算开始地址,H30000 spechd(5) 30005 ------ ------ H0 和数计算开始地址,H30000spechd(6)30006------------ H**和数计算字节数,规格表和数计算长度,在规格表增加或者减少变量时才会发生变化,具体的长度可从程序的romspec.s19文件中$30006中获取。
TF30EV 光传输设备 说明书

TF30EV光传输设备用户手册目录一.产品简介 (1)二.主要特点 (1)三.技术指标 (2)3.1.光接口 (2)3.2.E1接口 (2)3.3.2M V.35接口 (2)3.4.分帧的V.35接口 (2)3.5.以太网接口 (2)3.6.RS232接口 (3)3.7.公务电话接口 (3)3.8.工作环境 (3)3.9.供电条件 (3)3.10.外形尺寸 (3)四.产品外观 (4)五.接口定义 (5)5.1.光接口 (5)5.2.E1接口 (6)5.2.以太网接口定义 (6)5.3.V.35接口定义 (6)5.4.RS232接口定义 (7)六.开关设置 (7)6.1.功能开关 (8)6.2.TF30V时隙设置 (8)6.3.TF30E时隙设置 (9)6.4.接口设置举例 (10)6.5.接口阻抗设置 (12)6.6.V.35/V.24接口选择设置 (13)6.7.V.35接口连接DTE、DCE设备 (13)七.设备安装 (13)7.1.设备拆封 (13)7.2.设备检查 (13)7.3.设备安装 (13)八.常见故障解决 (14)九.典型应用 (14)十.随机配件 (15)十一.产品保修说明 (15)附录 (16)1.E1接口连接线制做方法 (16)2.直流电源连接方法 (16)一.产品简介TF30EV光传输设备是以超大规模集成电路为核心构成的30路等同于30路话路的光电合一的点到点式的光线路终端设备,适用于小容量交换机组网、用户环路网,移动通信(基站)、专网、DDN网等。
该设备除提供符合ITU-T/G.703建议要求的2Mbit/s通道外,还为用户提供了1路V.35数据通道和一路以太网数据接口。
该设备的V.35接口和以太接口不能同时共存,他们的接口速率都可通过拨码开关任意调节,总带宽为2Mbit/s。
TF30EV(E1+V.35的速率总和为2M,每接口速率可任意设置,既可设置成透明的E1、2M的V.35也可设置成两个成帧的E1和V.35的组合接口),TF30EV(E1+以太网的速率总和为2M,每接口速率可任意设置,既可设置成透明的E1、2M的以太网口也可设置成两个成帧的E1和以太网组合接口),TF30EV可作为本地网的中继传输设备,尤其适合作为移动通信网基站的光纤终端传输设备以及租用设备。
F2812主要功能简介-事件管理器

GP Timer Input & Output
Input:
内部高速外设时钟,HSPCLK 外部时钟TCLKINA/B,最高频率≤1/4 CPU时钟 方向输入引脚,TDIRA/B 复位信号,RESET
Output:
比较输出,TxCMP ADC启动转换信号 上溢、下溢、比较匹配、周期匹配 计数方向指示位
比较寄存器,TxCMPR
存放比较常数,不断与计数器比较,匹配时: 根据GPTCONA/B设置,比较输出引脚发生跳变 对应设置中断标志 中断未屏蔽,产生中断请求
周期寄存器,TxPR
存放周期值,决定定时器周期 与计数器值相等时,根据计数方式确定复位为0或转为减计数
16
GP Timer Registers 2
GPTCONA/B中的位反映计数方向 TDIRA/B引脚决定计数方向
1 增计数 0 减计数
17
GP Timer Clock
可采用内部时钟或外部时钟TCLKINA/B引脚输入 外部时钟频率≤1/4 CPU时钟 定向增/减计数模式:
T2、T4为QEP电路使用 QEP电路为定时器提供时钟、方向输入
内部/外部时钟输入,可编程分频,方向可引脚控制
4种可屏蔽中断:上溢、下溢、比较、周期
全比较单元 Full-Compare Units
3 x 2 个独立的比较单元,每个有6个比较输出
配合可编程死区发生器,产生PWM波形
可编程死区发生器 Programmable Deadband
Generation
13
GP Timer Functional Block
每个GP Timer 包括:
一个16位增/减计数器,TxCNT,RW,当前计数值 一个16位比较寄存器,TxCMPR,RW,双缓冲 一个16位周期寄存器,TxPR,EW,双缓冲 一个16位控制寄存器,TxCON,RW 内部/外部时钟输入,可定标 四个可屏蔽中断控制逻辑 一个增/减方向控制引脚,TDIRx 一个比较输出引脚,TxCMP 全局控制寄存器,GPTCONA/B
史陶比尔机器人TX200电路手册D28086204A

CS8C HP Controller Electrical diagrams manualD2*******A –27/08/2012MasterCS8C HP © Stäubli 20122 / 52© Stäubli 2012 - D2*******A CS8C HPTABLE OF CONTENTS1 -INTRODUCTION (5)1.1.Foreword (7)1.2.Definition of the elements around the machine (8)2 -WIRING DIAGRAMS (9)2.1.Glossary (11)2.2.Connector and component names (12)2.3.Connector pin outs (15)2.4.PSM (18)2.5.Cooling (20)2.6.RPS (21)2.7.ARPS (22)2.8.Digital power supplies (23)2.9.Solenoid valves (25)2.10.Brakes (26)2.11.Motors (28)2.12.Encoders (30)2.13.Thermal sensors (34)2.14.Auxiliary systems (35)puter (37)2.16.Starc (38)2.17.Starc connections (40)2.18.Cell (41)2.19.MCP (47)2.20.BIO (48)2.21.Field bus (50)CS8C HP© Stäubli 2012 - D2*******A3/ 524 / 52© Stäubli 2012 - D2*******A CS8C HPChapter 1 - IntroductionCHAPTER1 - INTRODUCTIONCS8C HP 5 / 52© Stäubli 2012 - D2*******A6 / 52© Stäubli 2012 - D2*******A CS8C HPChapter 1 - Introduction1.1.FOREWORDThe information contained in the present document is the property of STÄUBLI and itcannot be reproduced, in full or in part, without our prior written approval.The specifications contained in the present document can be modified without notice.Although all necessary precautions have been taken to ensure that the informationcontained in this document is correct, STÄUBLI cannot be held responsible for any errorsor omissions found in the illustrations, drawings and specifications contained in the saiddocument.If any difficulties are met with during operation or servicing of the robot that are not referredto in this document, or if further information is required, please contact the STÄUBLI AfterSales Department, "Robot Division".STÄUBLI, UNIMATION, VALare brands registered by STÄUBLI INTERNATIONAL AG.1.1.1.OBJECTIVE OF THIS MANUALThe objective of this manual is to provide some reference information concerning theinstallation, operation and maintenance of STÄUBLI robots. It provides help for the personsworking on the equipment, for reference purposes only. Indeed, in order to understand thepresent document and the use of STÄUBLI robots, it is necessary for staff to acquire thecorresponding knowledge by following a "robots" training course as provided by STÄUBLI.The photos are used to make the document easier to understand, they cannot beconstrued as being of a contractual nature.1.1.2.SPECIAL MESSAGES CONCERNING WARNINGS, ALERTS, AND INFORMATIONIn this document, there are two formats for warnings and alerts. The messages containedin the boxes inform staff of the potential risks involved in carrying out an action.These boxes are as follows (they are shown in decreasing order of importance):Danger messagetype of indication describes the potential danger, its possible effects and the stepsnecessary to reduce the danger. It is essential to comply with the instructions toensure personal safety.Warning messageto ensure equipment reliability and performance levels.CS8C HP7 / 52© Stäubli 2012 - D2*******AInformation messageNotes of the "information" type provide very important information to help the reader tounderstand a description or a procedure.sequencing of the operations described.1.2.DEFINITION OF THE ELEMENTS AROUND THE MACHINEPerson: general term identifying all individuals likely to come close to the STÄUBLImachine.Staff: identifies the persons specifically employed and trained to install, operate, andservice the STÄUBLI machine.User: refers to the persons or the company responsible for operating the STÄUBLImachine.Operator: refers to the person who starts or stops the robot, or controls its operation.•For UL robots: When arm is powered-on, a light on the arm is on to indicate there is apotential danger.This light is also on when manual brake release is performed(on axis 1on RX and TX robots, on axis 3 on Scara robots).•Do not connect or disconnect components while the unit is under power. The connectionbetween the controller and the robot arm can only be made if the controller has beenswitched off.•Remove part or tool loaded on robot during maintenance operations.•If unusual sounds or vibrations are noted on the robot arm, especially following a shock orsome other incident, it is necessary to inspect the tool and gripper fastenings carefully andmake diagnoses at low speed.8 / 52© Stäubli 2012 - D2*******A CS8C HPChapter 2 - Wiring diagramsCHAPTER2 - WIRING DIAGRAMSCS8C HP9 / 52© Stäubli 2012 - D2*******A10 / 52© Stäubli 2012 - D2*******A CS8C HPChapter 2 - Wiring diagrams2.1.GLOSSARYConnectornameComponentJ3xx ABZ Dual ABZ Encoder board Dual ABZ Encoder boardJ11xx ARPS Auxiliary Robot Power Supply Auxiliary Robot Power Supply J6xx BIO Basic Inputs Outputs Basic Inputs OutputsJ7xx BRB Brake Release Board Brake Release BoardJxM BRK Brake BrakeJCod COD Arm Encoder Arm EncoderJ2xx CPT Computer ComputerJ9xx DIG Digital part of the amplifier Digital part of the amplifierJ4xx DSI Dual Sensor Interface board inArm Dual Sensor Interface board in ArmJ7x EV Solenoid valve Solenoid valveJ12xx IC Interconnect Cable Interconnect CableJxM MOT Motor MotorXxx PSM Power Supply Module Power Supply ModuleJ8xx PWR Power part of the amplifier Power part of the amplifierJ10xx RPS Robot Power Supply Robot Power SupplyJ1xx RSI Robot Safety Interface Robot Safety InterfaceJ3xx STARC Stäubli Advanced Robot Control Stäubli Advanced Robot ControlJ1xx WMS Working Modes Selection frontpanel Working Modes Selection front panel2.2.CONNECTOR AND COMPONENT NAMESChapter 2 - Wiring diagramsChapter 2 - Wiring diagrams2.3.CONNECTOR PIN OUTS1 23121812124571113141516Chapter 2 - Wiring diagrams2.4.PSMChapter 2 - Wiring diagrams2.5.COOLINGT o p f a n s f o r T X 300 o n l yChapter 2 - Wiring diagrams 2.6.RPS2.7.ARPSChapter 2 - Wiring diagrams2.8.DIGITAL POWER SUPPLIESChapter 2 - Wiring diagrams2.9.SOLENOID VALVES2.10.BRAKESChapter 2 - Wiring diagrams2.11.MOTORS2.11.1.FOR TX200 FAMILYChapter 2 - Wiring diagrams2.11.2.FOR TX200 FAMILY2.12.ENCODERS2.12.1.FOR TX200 FAMILYChapter 2 - Wiring diagrams2.12.2.FOR TX300 FAMILYChapter 2 - Wiring diagrams2.13.THERMAL SENSORSChapter 2 - Wiring diagrams2.14.AUXILIARY SYSTEMS 2.14.1.FOR TX200 FAMILY2.14.2.FOR TX300 FAMILYChapter 2 - Wiring diagrams PUTER2.16.STARCChapter 2 - Wiring diagrams2.17.STARC CONNECTIONSChapter 2 - Wiring diagrams 2.18.CELLChapter 2 - Wiring diagramsChapter 2 - Wiring diagramsChapter 2 - Wiring diagrams 2.19.MCP2.20.BIOChapter 2 - Wiring diagrams2.21.FIELD BUSDeviceNet :Field bus boardCPTDeviceNet boardPhoënix MSTB 2.5/5Shield CAN V+ CAN V-CAN H CAN L 3 5 1 42。
EV ETX系列有源扬声器介绍

EV ETX产品说明:全新ETX有源流动扬声器系列产品基于业界领先的创新技术和EV85年的传统电声音响工程历史,提供当今市场上最先进的专业便携式有源扬声器。
ETX有源流动扬声器系列产品拥有三个两分频型号(10英寸,12英寸和15英寸,并且均安装了精密钛高频压缩驱动器),一个三分频型号(15英寸,包含一个6.5英寸MF驱动以及一个精密钛高频压缩驱动器),和两个超低频型号(分别为15英寸和18英寸的驱动器)。
ETX有源流动扬声器每一款产品都有紧凑、高档木质的外观,而音箱的独特性能使ETX有源流动扬声器与众不同。
这些革新工业设计、智能技术的结合使得ETX有源流动扬声器在所有应用中都有出色表现。
由EV设计的高效换能器、高功率D类放大器、信号同步换能器(SST)波导设计以及智能FIR驱动的DSP技术协同工作,以在最高声压级下提供无与伦比的EV声音品质和精确的覆盖角度。
产品特点:1: 智能技术、革新设计集成LCD的单键控制界面,便于设置;与EV演出级产品采用相同的算法(FIR驱动,峰值预估限幅和温度限幅器);EV专利的信号同步换能器(SST)波导设计,在扬声器系统配置中提供精确和一致的覆盖;超低频扬声器带有预设,可以具有真正的心型特性;智能的系统匹配,让全频和超低频的衔接设置更加简便。
2: 超越竞争对手的性能享有盛誉的EV声音品质和稳定性;额定功率1,800W (超低频) 和2,000W (全频);高效、高功率换能器,提供同类最佳的性能;专业级的组件和同类最佳的箱体耐用性(EV Coat标准饰面)。
3: EV 品质, 演出级的声音性能EV 专业音频工程设计,;18mm, 13层俄罗斯桦木板,采用坚固耐用的EV传统饰面和木工榫头连接美国最终组装,1000小时满载功率测试。
EV ETX-10P技术参数:EV ETX-12P技术参数:EV ETX-15P技术参数:EV ETX-35P技术参数:EV ETX-15SP技术参数:EV ETX-18SP技术参数:。
JSP技术中监听器组件应用及实例分析
改 变 时 .S rl 容 器 就 会 产生 相 应 的 事件 ,S rl 监 听 器 就是 ev t e ev t e
用 来 接收 和 处理 S rlt 器 产生 的 这些 事 件 的 。 eve 容
受 的对 象 ,应 用 程 序 已经 被 载 出 。
性改 变 的 事件 .包 括 :增 加 属性 、删 除 属性 、修 改 属 性 等 。监
听 器 类 需 要 实 现 ivxs rlt eveC ne t t b tLs n r接 aa . ve. rlt o txAtiue it e e S r e
口
E et v n 类
S v eCo tx Ev n er lt ne t e t
S rlt o txA tb tL s n r接 口方 法 : eveC ne t t iue it e r e
S rtt e v eCon e t ti u e se e t x Atrb t Litn r
Htp e so Lit n r t S s i n se e
Se v eConexAtr tEv n r lt t t ti e e t bu
S rlt o txEv n eveC ne t e t巾的方 法 :
在 S rl 24 r 共 有 8个 监 听 器 ,根 据 监 听 器 昕 监 听 对 象 ev t. } e l
的 类 型 和 范 嗣 .可 以 分 为 3类 :S rlt o tx 事 件 监 听 器 、 eveC ne t HTF S sin 事 件 监 听 器 和 S rlt q et事 件 监 听 器 。 ' es P o eveRe u s
S rl 24, 所有 监 听 器的 分 类情 况 如 表 l 示 。 ev t. t e r 所
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
EV TX系列参数
长期负载功率500W
短期负载功率2000W
灵敏度97db(1W/1m)
最大声压级130db
覆盖角度(水平*垂直)90X50
标称阻抗8欧
频响范围(-3db)60Hz-20kHz
频响范围(-10db)45Hz-20kHz
分频点1750Hz
尺寸(高*宽*深)616x382x380mm
净重(kg)20.2kg
TX1152(单15寸)
长期负载功率500W
短期负载功率2000W
灵敏度100db(1W/1m)
最大声压级133db
覆盖角度(水平*垂直)60X40
标称阻抗8欧
频响范围(-3db)55Hz-20kHz
频响范围(-10db)40Hz-20kHz
分频点1650Hz
尺寸(高*宽*深)776x446x446mm
净重(kg)27.8kg
长期负载功率1000W
短期负载功率4000W
灵敏度103db(1W/1m)最大声压级139db
覆盖角度(水平*垂直)60X40
标称阻抗4欧
频响范围(-3db)55Hz-13kHz
频响范围(-10db)50Hz-18kHz
分频点1750Hz
尺寸(高*宽*深)1154x508x471mm 净重(kg)42.8kg
TX1181(单18寸)
长期负载功率500W
短期负载功率2000W
灵敏度100db(1W/1m)最大声压级132db
覆盖角度(水平*垂直)全向
标称阻抗8欧
频响范围(-3db)50Hz-160Hz
频响范围(-10db)45Hz-700Hz
尺寸(高*宽*深)769x508x591mm 净重(kg)33.8kg
TX2181(双18寸)
长期负载功率1000W
短期负载功率4000W
灵敏度103db(1W/1m)最大声压级138db
覆盖角度(水平*垂直)全向
标称阻抗4欧
频响范围(-3db)50Hz-160Hz
频响范围(-10db)40Hz-1500Hz
尺寸(高*宽*深)1154x508x691mm 净重(kg)56.1kg。