L298N驱动模块使用说明
L298N驱动模块使用说明

1.产品说明产品说明::本L298N 驱动模块,采用ST 公司原装全新的L298N 芯片,采用SMT 工艺稳定性高,采用高质量铝电解电容,使电路稳定工作。
可以直接驱动两路3-16V 直流电机,并提供了5V 输出接口(输入最低只要6V),可以给5V 单片机电路系统供电(低纹波系数),支持3.3V MCU ARM 控制,可以方便的控制直流电机速度和方向,也可以控制2相步进电机,5线4相步进电机。
是智能小车必备利器。
:产品参数:.产品参数1.驱动芯片:L298N双H桥直流电机驱动芯片2.驱动部分端子供电范围Vs:+5V~+16V ; 如需要板内取电,则供电范围Vs:+6V~+16V3.驱动部分峰值电流Io:2A4.逻辑部分端子供电范围Vss:+5V~+7V(可板内取电+5V)5.逻辑部分工作电流范围:0~36mA6.控制信号输入电压范围(IN1 IN2 IN3 IN4):低电平:-0.3V≤Vin≤1.5V高电平:2.3V≤Vin≤Vss7.使能信号输入电压范围(ENA ENB):低电平:-0.3≤Vin≤1.5V(控制信号无效)高电平:2.3V≤Vin≤Vss(控制信号有效)8.最大功耗:20W(温度T=75℃时)9.存储温度:-25℃~+130℃10.驱动板尺寸:55mm*45mm*33mm(带固定铜柱和散热片高度)12.其他扩展:控制方向指示灯、逻辑部分板内取电接口。
3.接口说明接口说明::图中蓝色端子为电机驱动输出端与驱动电源输入端,排针处为电机控制逻辑输入端与5V 电源输出端OUT4 OUT3 OUT2 OUT1 控制电机输出端 VDD GND 为驱动电源输入端输入电压+6-16V。
L298N驱动模块使用说明.

1. 产品说明产品说明::
本 L298N 驱动模块,采用 ST 公司原装全新的 L298N 芯片,采用 SMT 工艺稳定性高,采用高质量铝电解电容,使电路稳定工作。
可以直接驱动两路 3-16V 直流电机,并提供了 5V 输出接口(输入最低只要 6V , 可以给 5V 单片机电路系统供电 (低纹波系数 ,支持 3.3V MCU ARM 控制,可以方便的控制直流电机速度和方向,也可以控制2相步进电机,5线 4相步进电机。
是智能小车必备利器。
. 产品参数
产品参数:
:
1.驱动芯片:L298N双 H 桥直流电机驱动芯片
2.驱动部分端子供电范围 Vs:+5V~+16V ; 如需要板内取电,则供电范围Vs:+6V~+16V
3.驱动部分峰值电流 Io:2A
4.逻辑部分端子供电范围 Vss:+5V~+7V(可板内取电+5V
5.逻辑部分工作电流范围:0~36mA
6.控制信号输入电压范围(IN1 IN2 IN3 IN4 :
低电平:-0.3V≤Vin≤1.5V
高电平:2.3V≤Vin≤Vss
7.使能信号输入电压范围(ENA ENB :
低电平:-0.3≤Vin≤1.5V(控制信号无效
高电平:2.3V≤Vin≤Vss(控制信号有效
8. 最大功耗:20W (温度 T =75℃时
9. 存储温度:-25℃~+130℃
10. 驱动板尺寸 :55mm*45mm*33mm(带固定铜柱和散热片高度 12. 其他扩展:控制方向指示灯、逻辑部分板内取电接口。
3. 接口说明接口说明: :。
L298N电机驱动板使用说明
Ywrobot 单片机
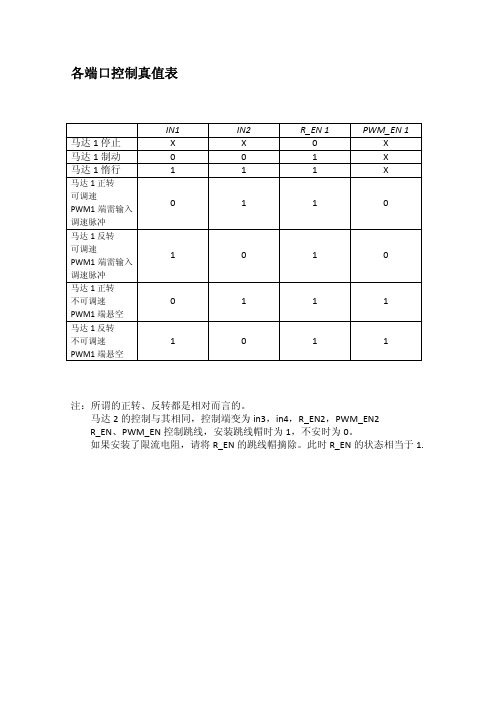
各端口ቤተ መጻሕፍቲ ባይዱ制真值表
IN1
马达 1 停止
X
马达 1 制动
0
马达 1 惰行
1
马达 1 正转
可调速
PWM1 端需输入
0
调速脉冲
马达 1 反转
可调速
PWM1 端需输入
1
调速脉冲
马达 1 正转
不可调速
0
PWM1 端悬空
马达 1 反转
不可调速
1
PWM1 端悬空
IN2
R_EN 1
PWM_EN 1
X
0
X
0
1
X
1
1
X
1
电机驱动电源 输入端 6—12V
与电机驱动电源 相通,可做步进电 机公共接头
+‐ +‐
电机输出口 1 电机输出口 2
预留限流电阻位
预留限流电阻位
1234
1234 跳线功能说明
JP1:限流电阻 1 使能。短路时关闭限流电阻(如果没有安装限流电阻需短路此跳线才能使电机转动) JP2:限流电阻 1 使能。短路时关闭限流电阻(如果没有安装限流电阻需短路此跳线才能使电机转动) JP3:PWM1 使能。短路时忽略 PWM 输入(如果没有 PWM 信号输入需短路此跳线才能使电机转动) JP3:PWM2 使能。短路时忽略 PWM 输入(如果没有 PWM 信号输入需短路此跳线才能使电机转动)
1
0
0
1
0
1
L298N模块使用说明书

3.驱动部分峰值电流 Io:2A 4.逻辑部分端子供电范围 Vss:3.3-5.5V 5.逻辑部分工作电流范围:0~47mA 6.控制信号输入电压范围:高电平4.5-5.5V 低电平0V 7.最大功耗:20W 8.存储温度:-25℃~+130℃ 9.驱动板尺寸:55mm*49mm*33mm 10.驱动板重量:46g 11.其他功能:控制方向指示灯、电源指示,电流检测,逻 辑部分板内取电接口。
高低电平; OUT1-OUT4:OUT1、OUT2 接电机 1,OUT3、OUT4 接电机 2,OUT1 和 OUT2 有电压差即一个为高一个为低电机才转; ENA:OUT1-OUT2 的使能端,高电平有效,低电平禁止,跳线 帽接上默认 ENA 为高电平,一般不用管,如果需要 PWM 调速, 就需要拔掉跳线帽,ENA 接单片机 IO 口; ENB:OUT3-OUT4 的使能端,高电平有效,跳线帽接上默认 ENA 为高电平,一般不用管,如果需要 PWM 调速,就需要拔 掉跳线帽,ENB 接单片机 IO 口; R1-R4:跳线帽接上,IN1-IN4 端加了 10K 的上拉电阻,跳线 帽拔掉,无上拉电阻;
功能简图:
模块提供4输入或者6输入单片机信号,用跳线帽灵活选择, 支持 PWM 调速,支持3.3V 单片机,板载上拉电阻,完美解决 51单片机 IO 口驱动能力不够的问题。
模块接线方法:IN1-IN4接单片机, ENA,ENB 可以用跳线帽选择直接接高电平或者用单片 机控制,IN1-IN4提供4个跳线帽选择是否接上10K 的 上拉电阻,OUT1-OUT2接直流电机1,OUT3-OUT4接电 机2,VCC,GND 分别接电池盒正负极,当 VCC 电压大 于6V 时,+5为输出,可以方便给5V 的单片机供电, 当 VCC 电压小于6V 时,需拔掉5V_EN 跳线帽,外部给
L298N大功率电机驱动模块使用手册

void main(void)
{
DelayMs(100);
while(1)
{
motor_ffw_setp(50); //电机正转 50 步
DelayMs(300);
//换向延时
motor_ffw_setp(50); //电机正转 50 步
DelayMs(300);
//换向延时
motor_ffw_setp(50); //电机正转 50 步
uchar MOTO_SETP_TIME = 2;//步进电机每走一步要用的时间(单位毫秒)
/*=========================================================================
主程序
=========================================================================*/
sbit PWM2_OUT = P3^5; //M2:PWM 的输出脚
sbit BEEP
sbit MOTOR1_DR1 = P3^0; //M1:电机转向控制 1
sbit MOTOR1_DR2 = P3^1; //M1:电机转向控制 2
教大家使用L298N电机驱动模块,电机控制正反转、调速很轻松!

教大家使用L298N电机驱动模块,电机控制正反转、调速很轻松!普及数电模电知识,科教兴国。
大家好,今天和大家来学习L298N电机驱动模块。
L298N是双H 桥电机驱动芯片,可以驱动两个直流电机或者一个步进电机,能实现电机的正反转以及调速。
先来看看L298N芯片实物:上图是15脚Multiwatt封装的L298N。
L298N兼容标准的TTL逻辑,是一款高电压、高电流双全桥驱动器,能够驱动感性负载,例如继电器、电磁阀、直流电机、步进电机等。
两个独立的使能信号用于使能或禁能设备,每一个桥的下管射极相连,射极引脚可以连接相应的采样电阻,用以过流保护,芯片的逻辑供电与负载供电分离,以使芯片可以工作在更低的逻辑电压下。
这个芯片那么多引脚,对于各引脚的功能定义,我们可以通过数据手册来了解:从下往上数,按照序号,1脚和15脚是:电机电流(或叫桥驱动电流)检测引脚;2、3脚是A桥输出引脚,可接一个直流电机;4脚是负载驱动供电引脚,这个引脚和地之间必须要接一个100nF的无感电容;5脚和7脚是A桥信号输入,兼容TTL电平;6脚和11脚是使能输入,兼容TTL,低电平禁能,高电平使能;8脚是地,GND;9脚是逻辑供电,该引脚到地必须连接一个100nF的电容;10脚和12脚是B 桥信号输入,同样兼容TTL逻辑电平;13脚和14脚是B桥输出,可接一个直流电机。
在这里需要提一下,是关于1脚和15脚:当需要对电机电流进行检测时,分别在sense A、B两个引脚上串接个小电阻,当A、B两个桥的电流(电机电流)流过两个电阻时转换成电压,这个电压被送到控制L298工作的上位机(或控制电路),上位机就根椐这个电压的高低判断L298是否工作正常。
如果这个电压超过设计上限时,上位机就判L298有故障,可采取如下保护措施:1、停止步进脉冲输出,关断电机电流。
2、给EN脚一个低电平,关闭L298。
如sense不用,就直接将sense A、B两脚接地。
L298N电机驱动模块详解

L298N电机驱动器使用说明书之五兆芳芳创作注意:本说明书中添加超链接的按CTRL并点击连接,便可看到内容.L298N是ST公司生产的一种高电压、大电流电机驱动芯片.该芯片采取15脚封装.主要特点是:任务电压高,最高任务电压可达46V;输出电流大,瞬间峰值电流可达3A,持续任务电流为2A;额外功率25W.内含两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机、继电器线圈等理性负载;采取尺度逻辑电平信号控制;具有两个使能控制端,在不受输入信号影响的情况下允许或禁止器件任务有一个逻辑电源输入端,使内部逻辑电路部分在低电压下任务;可以外接检测电阻,将变更量反响给控制电路.使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机.扼要说明:一、尺寸:80mmX45mm二、主要芯片:L298N、光电耦合器三、任务电压:控制信号直流5V;电电机压直流3V~46V(建议使用36伏以下)四、五、额外功率:25W特点:1、具有信号指示.2、转速可调3、抗搅扰能力强4、具有过电压和过电流庇护5、可单独控制两台直流电机6、可单独控制一台步进电机7、PWM脉宽平滑调速8、可实现正反转9、采取光电隔离六、有详细使用说明书七、提供相关软件八、提供例程及其学习资料驱动器结构详解3.直流电机调速PWM脉宽信号输入端.(控制步进电机或控制直流电机无需调速时,保持此状态)5.光电隔离(抗搅扰)6.焦点芯片(L298N)实例一:步进电机的控制实例步进电机是数字控制电机,它将脉冲信号转酿成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此很是适合于单片机控制.步进电机可分为反响式步进电机(简称VR)、永磁式步进电机(简称PM)和混杂式步进电机(简称HB).一、步进电机最大特点是:1、它是通过输入脉冲信号来进行控制的.三、基来源根底理作用如下:两相四拍任务模式时序图:(1)控制换相顺序1、通电换相这一进程称为脉冲分派.例如:1、两相四线步进电机的四拍任务方法,其各相通电顺序为(ABA’-B’)依次循环.《例一、步进电机正转两相四拍程序》(通电控制脉冲必须严格依照这一顺序辨别控制A,B相的通断.)2、两相四线步进电机的四拍任务方法,其各相通电顺序为: (A-AB-B-BA’-A’-A’B’B’-B’A)例二、步进电机正转两相八拍程序》依次循环.(出于对力矩、平稳、噪音及削减角度等方面考虑.往往采取八拍任务方法)参考下例:《例四、步进电机反转两相八拍程序》(3)控制步进电机的速度如果给步进电机发一个控制脉冲,它就转一步,再发一个脉冲,它会再转一步.两个脉冲的距离越短,步进电机就转得越快.调整单片机收回的脉冲频率,就可以对步进电机进行调速.(注意:如果脉冲频率的速度大于了电机的反响速度,那么步进电机将会出现失步现象).参考下例:《例五、步进电机两相四拍调速程序》《例六、步进电机两相八拍调速程序》(4)四相电机的控制程序如图:按CTRL并点击(驱动器控制四相步进电机接线图)如图:按CTRL并点击(驱动器控制四相步进电机接线图)《例八、四相步进电机正转八拍程序》《例九、四相步进电机反转四拍程序》《例十、四相步进电机反转八拍程序》《例十一、四相步进电机四拍调速程序》《例十二、四相步进电机八拍调速程序》《例十二、四相步进电机八拍调速程序》《例十三、四相步进电机八拍调速程序办法二》以下为参考程序:《例十三、四相步进电机八拍调速程序办法二》以下为参考程序:《例十四、步进电机分档控制》《例十四、步进电机分档控制》《例十五、步进电机每按一下转1.8度》《例十六、步进电机每按一下转3.6度》实例二:直流电机的控制实例使用直流/步进两用驱动器可以驱动两台直流电机.辨别为M1和M2.引脚A,B可用于输入PWM脉宽调制信号对电机进行调速控制.(如果无须调速可将两引脚接5V,使电机任务在最高速状态,既将短接帽短接)实现电机正反转就更容易了,输入信号端IN1接高电平输入端IN2接低电平,电机M1正转.(如果信号端IN1接低电平,IN2接高电平,电机M1反转.)控制另一台电机是同样的方法,输入信号端IN3接高电平,输入端IN4接低电平,电机M2正转.(反之则反转),PWM信号端A控制M1调速,PWM 信号端B控制M2调速.可参考下图表:。
L298N适用说明

L298N电机驱动模块
接线、测试及使用方法介绍:
控制端的接线说明(隔离和不隔离都适用本说明)(这个问题是有些动手能力比较差的买家常问的问题,因此在此详细说明一下):
当IN1输入高电平(5V)时,对应的输出端口A就会输出稍微小于电机供电端输入的电压,如电机供电输入12V,这是A端口和GND 之间的电压就是11V多。
当IN2输入高电平(5V)时,对应的输出端口B就会输出稍微小于电机供电端输入的电压,如电机供电输入12V,这是B端口和GND 之间的电压就是11V多。
当IN3输入高电平(5V)时,对应的输出端口C就会输出稍微小于电机供电端输入的电压,如电机供电输入12V,这是C端口和GND 之间的电压就是11V多。
当IN4输入高电平(5V)时,对应的输出端口D就会输出稍微小于电机供电端输入的电压,如电机供电输入12V,这是D端口和GND 之间的电压就是11V多。
因此,当IN1输入5v ,IN2输入0V,A和GND之间的电压是11V多,B和GND之间的电压就是0V,这样A和B端的电压就是12V,这样电机1就正转;当IN1输入5V,IN2输出0V时,电机1就反转。
IN3和IN4也是根据这里原理控制电机2的正反转。
如果是步进电机,控制IN1到IN4的时序就能控制步进电机的正反转。
调速:
如果不需要调速时将PWMB、PWMA和5V之间的短路帽插上,这样电机就会全速运行。
如果需要调速,取下PWMB、PWMA和5V之间的短路帽,在PWMB、PWMA端输入PWM信号来控制电机的转速。
步进电机出了可以输入PWM信号来控制步进电机的转速外还可以控制输入时序来控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.产品说明产品说明::
本L298N 驱动模块,采用ST 公司原装全新的L298N 芯片,采用SMT 工艺稳定性高,采用高质量铝电解电容,使电路稳定工作。
可以直接驱动两路3-16V 直流电机,并提供了5V 输出接口(输入最低只要6V),可以给5V 单片机电路系统供电(低纹波系数),支持3.3V MCU ARM 控制,可以方便的控制直流电机速度和方向,也可以控制2相步进电机,5线4相步进电机。
是智能小车必备利器。
:
产品参数:
.产品参数
1.驱动芯片:L298N双H桥直流电机驱动芯片
2.驱动部分端子供电范围Vs:+5V~+16V ; 如需要板内取电,则供电范围Vs:+6V~+16V
3.驱动部分峰值电流Io:2A
4.逻辑部分端子供电范围Vss:+5V~+7V(可板内取电+5V)
5.逻辑部分工作电流范围:0~36mA
6.控制信号输入电压范围(IN1 IN2 IN3 IN4):
低电平:-0.3V≤Vin≤1.5V
高电平:2.3V≤Vin≤Vss
7.使能信号输入电压范围(ENA ENB):
低电平:-0.3≤Vin≤1.5V(控制信号无效)
高电平:2.3V≤Vin≤Vss(控制信号有效)
8.最大功耗:20W(温度T=75℃时)
9.存储温度:-25℃~+130℃
10.驱动板尺寸:55mm*45mm*33mm(带固定铜柱和散热片高度)
12.其他扩展:控制方向指示灯、逻辑部分板内取电接口。
3.接口说明接口说明::
图中蓝色端子为电机驱动输出端与驱动电源输入端,排针处为电机控制
逻辑输入端与5V 电源输出端
OUT4 OUT3 OUT2 OUT1 控制电机输出端 VDD GND 为驱动电源输入端输入电压+6-16V。