阀门电动执行器控制模块设计
基于SolidWorks的防爆精小型阀门电动执行器设计

基于SolidWorks 的防爆精小型阀门电动执行器设计Design of explosion proof fine valve electric actuator based on SolidWorks丁时锋,李清香,黄 尧,匡仁瑞,俞承建DING Shi-feng, LI Qing-xiang, HUANG Yao, KUANG Ren-rui, YU Cheng-jian(九江学院 机械与材料工程学院,九江 332005)摘 要:依据防爆精小型阀门电动执行器的技术要求,完成了电动执行器总体方案设计和传动机构设计,选用交流异步电动机驱动,详细给出了各级传动参数。
以SolidWorks软件为设计平台,完成了电动执行器的三维参数化建模和虚拟样机装配。
应用Simulation有限元分析模块对电动执行器传动轴进行了静态与疲劳分析,得出了轴的静态应力、位移分析结果及使用寿命、损坏百分比情况。
据所设计虚拟样机及有限元分析结果制作的实物样机用于某煤矿井下生产现场,能够准确启闭控制阀门,性能良好。
关键词:SolidWorks;防爆精小型阀门;电动执行器;有限元分析中图分类号:TH122 文献标识码:B 文章编号:1009-0134(2020)07-00165-04收稿日期:2019-04-03作者简介:丁时锋(1975 -),男,湖北人,副教授,硕士,研究方向为机电产品设计及电液控制技术。
0 引言阀门广泛应用于工业、电力、石油、化工、交通运输等部门行业,在对阀门实行远程自动控制过程中,电动执行器是一种重要现场驱动装置与执行部件。
阀门电动执行器是一种典型的机电一体化集成装置,其性能的好坏直接影响阀门的调节控制。
目前电动执行器产品主要有DKJ 角行程电动执行机构和DKZ 直行程电动执行机构两种,一般将其与阀门配合联接,构成角行程或直行程控制的电动调节阀[1~5]。
在某煤矿井下生产现场,周围是粉尘与易爆气体环境,由于工作环境恶劣、其电动执行机构必须具有防尘防爆性能。
电动执行器的设计_毕业设计论文

毕业设计:电动执行器设计摘要电动执行器被广泛应用于各种工业自动化过程的控制环节,能够精确地实现远程控制。
主要由伺服放大器和执行器两大部分组成。
电动执行器接受调节器来的4-20mA的直流信号,将其线性地转换成机构转角或直线位置位移,用以操作风门、挡板、阀门等调节机构,以实现自动调节。
本设计的重点是设计电动执行器的控制部分。
控制部分主要由单片机和可控硅组成。
其中单片机选用AT89C2051,AT89C2051单片机是51系列单片机的一个成员,是8051单片机的简化版。
AT89C2051构成的单片机系统是具有结构最简单、造价最低廉、效率最高的微控制系统,省去了外部的RAM、ROM和接口器件,减少了硬件开销,节省了成本,提高了系统的性价比。
可控硅选用BTA16。
本设计的电动执行器的控制部分主要是控制伺服电机的正反转。
关键词:电动执行器;控制;单片机;可控硅;电机Electric actuator designABSTRACTElectric actuators are widely used in various industrial automation control links, which can realize remote control precisely. Mainly by the servo amplifier and the actuator is composed of two parts, Electric actuator for DC signal regulator to 4~20mA, the linear conversion mechanism of the angular or linear displacement, to operate a damper, baffle, valve adjustment mechanism, in order to achieve automatic adjustment. The point of this design is to control the design of electric actuator part.Control part is mainly composed of single-chip microcomputer and controlled silicon. The SCM AT89C2051, AT89C2051 microcontroller is a member of the 51 Series MCU, is a simplified version of the 8051 single chip microcomputer. AT89C2051 constitute the SCM system is the most simple structure, low cost, most efficient micro-control system, eliminating the external RAM, ROM and the interface device, reduces the hardware cost, saves the cost, enhances the system performance. Silicon controlled rectifier using BTA16. The control part of the design of the electric actuator is the main positive inversion control servo motor.Keywords: electric actuator, Control; MCU; thyristor; motor目录第一章绪论 ------------------------------------------------------------------------------------------------------------- 11.1设计的背景和意义-------------------------------------------------------------------------------------------- 11.2概述 ---------------------------------------------------------------------------------------------------------------- 11.3电动执行器的性能特点 ------------------------------------------------------------------------------------- 21.4 电动执行器的发展-------------------------------------------------- 2第二章总体设计方案------------------------------------------------------------------------------------------- 52.1 电动执行器的结构框图---------------------------------------------- 52.2 单片机的选取------------------------------------------------------ 62.2.1单片机的内部结构----------------------------------------------------------------------------------- 62.2.2软硬件的开发-------------------------------------------------- 62.2.3引脚说明------------------------------------------------------ 72.2.4主要性能------------------------------------------------------ 82.3 输入电路的设计---------------------------------------------------- 92.4 防止振荡电路的设计----------------------------------------------- 102.5 信号的比较------------------------------------------------------- 132.6可控硅的选择与说明------------------------------------------------ 142.7 光电耦合器------------------------------------------------------- 162.8 晶振电路--------------------------------------------------------- 182.9 开关电源模块----------------------------------------------------- 192.10 系统总体电路设计------------------------------------------------ 202.10.1系统设计内容------------------------------------------------ 202.10.2电压跟随器的作用-------------------------------------------- 21第三章控制电机的程序和设计流程图-------------------------------------------------------------- 233.1 流程图----------------------------------------------------------- 23第四章电动执行器故障分析与维护------------------------------------------------------------------- 253.1 注意事项--------------------------------------------------------- 253.2 故障分析与维护--------------------------------------------------- 25结论 -------------------------------------------------------------------------------------------------------------------------- 27 致谢 -------------------------------------------------------------------------------------------------------------------------- 28 参考文献------------------------------------------------------------------------------------------------------------------ 29第一章绪论1.1设计的背景和意义电动执行器在自动控制系统中的作用是接受来自控制器的控制信号,通过电动执行器本身开度的变化,控制阀体等节流件的开度,达到控制流量的目的。
阀门电动执行器控制模块设计

阀门电动执行器控制模块设计一、设计目的和要求电气控制技术综合实践是电气工程及其自动化专业学生在所有专业课结束时进行的一次课程设计,是一个综合运用专业知识的过程。
其目的在于全面检验学生对专业基础课和专业课知识的掌握情况,提高知识综合运用能力和动手实践能力。
设计包括确定控制任务、系统总体方案设计、硬件系统设计、控制软件的设计、系统调试、性能测试等方面的要求,以便使学生掌握电气控制系统设计的总体思路和方法。
二、设计内容及步骤1 任务提出电动执行器是工业过程控制中的重要设备,它接收来自调节器的模拟信号(一般是4~20mA 电流信号)或上位机的数字信号, 将其转换为电动执行器相对应的机械位移(转角、直线或多转)并自动改变操作变量(调节阀、风门、挡板开度等),以达到对被调参数(温度、压力、流量、液位等)进行自动调节的目的,使生产过程按预定要求进行。
本课题要求设计一个阀门电动执行器控制模块。
1.1 对象参数:(1)电动机为单相异步电动机,额定功率10W,额定电流0.16A,外接电容CBB61、1.5uF500V。
(2)电源:220V±10%,50Hz。
(3)环境温度:-25~80℃。
(4)环境湿度:≤95%RH。
1.2 基本功能要求:(1)输入4~20mA或1~5V控制信号,相应阀门开度在0~100%之间变化。
(2)输入信号失效,位置保持原位。
(3)可就地手动操作。
(4)死区可以调整。
1.3 扩展功能要求(选做)(1)过力矩保护。
(2)行程限位保护。
(3)定位误差:≤1%。
(4)灵敏度:0.025%(1/4096)。
三、阀门电动执行器控制模块工作原理电动执行器主要由控制器、电机和减速器三部分组成,由上位调节装置给出的1~5V电压信号Us,减速器输出的直线位移信号x(或角位移信号θ)经位置检测装置后形成位置反馈信号Uf,这两个信号经比较和放大后控制电机的运转,电机带动减速机构产生相应的直线位移或转角位移。
CPA100-220调节阀执行器阀门控制模块
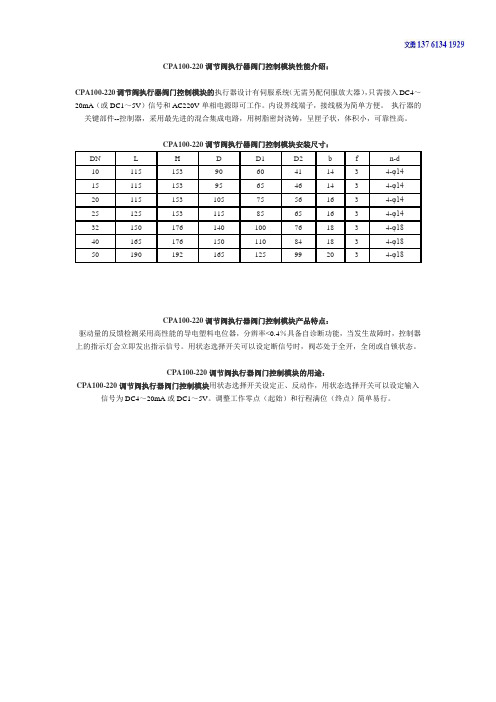
CPA100-220调节阀执行器阀门控制模块性能介绍:
CPA100-220调节阀执行器阀门控制模块的执行器设计有伺服系统(无需另配伺服放大器),只需接入DC4~20mA(或DC1~5V)信号和AC220V单相电源即可工作。
内设界线端子,接线极为简单方便。
执行器的关键部件--控制器,采用最先进的混合集成电路,用树脂密封浇铸,呈匣子状,体积小,可靠性高。
CPA100-220调节阀执行器阀门控制模块安装尺寸:
DN L H D D1 D2 b f n-d
10 115 153 90 60 41 14 3 4-φ14
15 115 153 95 65 46 14 3 4-φ14
20 115 153 105 75 56 16 3 4-φ14
25 125 153 115 85 65 16 3 4-φ14
32 150 176 140 100 76 18 3 4-φ18
40 165 176 150 110 84 18 3 4-φ18
50 190 192 165 125 99 20 3 4-φ18
CPA100-220调节阀执行器阀门控制模块产品特点:
驱动量的反馈检测采用高性能的导电塑料电位器,分辨率<0.4%具备自诊断功能,当发生故障时,控制器上的指示灯会立即发出指示信号。
用状态选择开关可以设定断信号时,阀芯处于全开,全闭或自锁状态。
CPA100-220调节阀执行器阀门控制模块的用途:
CPA100-220调节阀执行器阀门控制模块用状态选择开关设定正、反动作,用状态选择开关可以设定输入信号为DC4~20mA或DC1~5V。
调整工作零点(起始)和行程满位(终点)简单易行。
电动执行器的设计_毕业设计论文
毕业设计:电动执行器设计摘要电动执行器被广泛应用于各种工业自动化过程的控制环节,能够精确地实现远程控制。
主要由伺服放大器和执行器两大部分组成。
电动执行器接受调节器来的4-20mA的直流信号,将其线性地转换成机构转角或直线位置位移,用以操作风门、挡板、阀门等调节机构,以实现自动调节。
本设计的重点是设计电动执行器的控制部分。
控制部分主要由单片机和可控硅组成。
其中单片机选用AT89C2051,AT89C2051单片机是51系列单片机的一个成员,是8051单片机的简化版。
AT89C2051构成的单片机系统是具有结构最简单、造价最低廉、效率最高的微控制系统,省去了外部的RAM、ROM和接口器件,减少了硬件开销,节省了成本,提高了系统的性价比。
可控硅选用BTA16。
本设计的电动执行器的控制部分主要是控制伺服电机的正反转。
关键词:电动执行器;控制;单片机;可控硅;电机Electric actuator designABSTRACTElectric actuators are widely used in various industrial automation control links, which can realize remote control precisely. Mainly by the servo amplifier and the actuator is composed of two parts, Electric actuator for DC signal regulator to 4~20mA, the linear conversion mechanism of the angular or linear displacement, to operate a damper, baffle, valve adjustment mechanism, in order to achieve automatic adjustment. The point of this design is to control the design of electric actuator part.Control part is mainly composed of single-chip microcomputer and controlled silicon. The SCM AT89C2051, AT89C2051 microcontroller is a member of the 51 Series MCU, is a simplified version of the 8051 single chip microcomputer. AT89C2051 constitute the SCM system is the most simple structure, low cost, most efficient micro-control system, eliminating the external RAM, ROM and the interface device, reduces the hardware cost, saves the cost, enhances the system performance. Silicon controlled rectifier using BTA16. The control part of the design of the electric actuator is the main positive inversion control servo motor.Keywords: electric actuator, Control; MCU; thyristor; motor目录第一章绪论 ------------------------------------------------------------------------------------------------------------- 11.1设计的背景和意义-------------------------------------------------------------------------------------------- 11.2概述 ---------------------------------------------------------------------------------------------------------------- 11.3电动执行器的性能特点 ------------------------------------------------------------------------------------- 21.4 电动执行器的发展-------------------------------------------------- 2第二章总体设计方案------------------------------------------------------------------------------------------- 52.1 电动执行器的结构框图---------------------------------------------- 52.2 单片机的选取------------------------------------------------------ 62.2.1单片机的内部结构----------------------------------------------------------------------------------- 62.2.2软硬件的开发-------------------------------------------------- 62.2.3引脚说明------------------------------------------------------ 72.2.4主要性能------------------------------------------------------ 82.3 输入电路的设计---------------------------------------------------- 92.4 防止振荡电路的设计----------------------------------------------- 102.5 信号的比较------------------------------------------------------- 132.6可控硅的选择与说明------------------------------------------------ 142.7 光电耦合器------------------------------------------------------- 162.8 晶振电路--------------------------------------------------------- 182.9 开关电源模块----------------------------------------------------- 192.10 系统总体电路设计------------------------------------------------ 202.10.1系统设计内容------------------------------------------------ 202.10.2电压跟随器的作用-------------------------------------------- 21第三章控制电机的程序和设计流程图-------------------------------------------------------------- 233.1 流程图----------------------------------------------------------- 23第四章电动执行器故障分析与维护------------------------------------------------------------------- 253.1 注意事项--------------------------------------------------------- 253.2 故障分析与维护--------------------------------------------------- 25结论 -------------------------------------------------------------------------------------------------------------------------- 27 致谢 -------------------------------------------------------------------------------------------------------------------------- 28 参考文献------------------------------------------------------------------------------------------------------------------ 29第一章绪论1.1设计的背景和意义电动执行器在自动控制系统中的作用是接受来自控制器的控制信号,通过电动执行器本身开度的变化,控制阀体等节流件的开度,达到控制流量的目的。
阀门电动执行装置设计毕业设计论文

毕业设计(论文)阀门电动执行装置设计Valve electric actuator design毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
智能阀门电动执行器设计与测试
智能阀门电动执行器设计与测试摘要:智能阀门在工业上的控制应用已经逐渐取代了机械式阀门控制系统,由于在工业生产中的应用对阀门控制系统有着迫切的要求,对智能阀门控制精度、控制速度和控制灵活度都有极高的标准。
近年来,国内智能阀门的控制方法使用机械式阀门定位控制较多,然而国外对智能阀门定位控制的研究,故障发生的频率较高,使智能阀门在实际因公众较少使用。
关键词:智能阀门;电动执行器设计;测试引言阀门广泛应用于电力、水利、化工等行业并发挥着关键作用。
其执行机构用于阀门控制,是提高阀门控制精度、安全系数以及响应速度的关键所在。
针对国内阀门普遍存在的控制精度低、稳定性及安全性差、智能化水平不高的缺陷,国内外科研机构对阀门电动执行器展开了一系列的研究,在机电一体化、先进控制策略、智能通信等方面取得了突出成果。
1基于信息技术的阀门智能控制系统的设计阀门智能控制系统的硬件设计包括CAN通信接口、单元控制器和阀门智能控制器节点3大部分。
采用微控制器技术,实现了阀门的数字控制和智能控制;利用CAN总线技术,构建两级总线阀门智能控制系统,实现阀门的集中控制和远程控制。
本系统采用的是CAN控制器和CAN收发器结合的通信接口,实现单元控制器和智能控制器节点之间的通信。
该控制器使用的是SJA1000型号;CAN收发器使用的是PCA82C250型号,能够快速接受和发送信号;微处理器采用的是AT89C52单片机。
该模块中利用了光电隔离电路,有效地避免了总线的干扰引入系统。
单元控制器模块利用两个COU架构,一级CPU含有两个CAN接口,与通信系统相连接,分别与一级总线、二级总线相连接,两个总线上的传播速率能够不一样,在实际应用中根据总线中节点的分布距离进而选取合适的传送速率,进行CPU显示驱动和人机接口。
在阀门智能控制器节点的模块中,通过使用单片机来控制单项异步电动机的正反转,实现阀门的智能开关响应,在阀门处接入一个开度反馈,实现对阀门的开度准确控制,单片机也是经过CAN通信接口与总线进行通信。
阀门电动执行装置设计
阀门电动执行装置设计一、引言阀门电动执行装置是一种能够实现阀门自动开启、关闭和调节的装置。
随着自动化技术的发展,阀门电动执行装置在工业、化工、石油、天然气等领域得到了广泛应用。
本文将介绍阀门电动执行装置的设计原理、结构和工作原理,以及设计时需要考虑的一些关键因素。
二、设计原理1.电机选择:根据阀门的类型和需要的工作扭矩,选择适合的电机。
通常情况下,选择步进电机、伺服电机或直流电机。
2.传动装置设计:根据阀门的类型和运动要求,设计适当的传动装置,如蜗轮蜗杆传动、齿轮传动或皮带传动。
3.电气控制系统设计:设计一个合理的电气控制系统,实现对电动执行装置的远程控制、自动控制和监测。
三、结构设计1.阀门:根据具体的工艺要求和介质特性选择合适的阀门类型和规格。
2.执行机构:将电动机的输出功率转化为阀门的开启和关闭力矩的装置,通常包括电机支架、高低减速机构、连杆和阀门执行机构。
3.传动装置:将电机的转动传递给阀门的装置,通常采用蜗轮蜗杆传动、齿轮传动、皮带传动等方式。
4.电控装置:实现对电动执行装置的控制和监测,包括电机控制器、传感器、行程开关和信号传输装置。
四、工作原理1.开启:控制电机正转,电机通过传动装置带动执行机构产生开启扭矩,使阀门逐渐开启。
2.关闭:控制电机反转,电机通过传动装置带动执行机构产生闭合扭矩,使阀门逐渐关闭。
3.调节:通过控制电机的转速和运动方向,以及执行机构的设计,实现对阀门开度的精确控制。
五、设计关键因素在进行阀门电动执行装置的设计时,需要考虑以下的关键因素:1.载荷计算:根据阀门的类型、尺寸和工况要求,计算阀门的开启、关闭和调节时的扭矩和力矩。
2.传动选型:根据载荷计算的结果,选择合适的传动装置,保证传动的可靠性和精度。
3.动力选择:根据传动装置的选型结果,选择合适的电机类型和功率,确保电机能够满足阀门的工作要求。
4.控制系统设计:设计合理的控制系统,实现对电动执行装置的远程控制、自动控制和监测。
智能阀门电动执行机构控制系统建模及总体方案设计
智能阀门电动执行机构控制系统建模及总体方案设计
林志
【期刊名称】《科学技术创新》
【年(卷),期】2024()11
【摘要】本文主要探究了适用于智能阀门的电动执行机构控制系统的建模方法和设计方案。
该系统由控制模块、通信模块、电机驱动模块等组成,利用传感器获取当前位置信息,与给定位置信息对比后,利用控制算法求出信号误差并生成控制指令,驱动电机运行从而实现对阀门开度的控制。
该系统的控制模块采用闭环控制,执行模块采用电流、速度、位置三环控制,确保在高压力、大流量工作环境下,也能实现精确控制、实时响应,在满足实用性的基础上对延长智能阀门的使用寿命有积极帮助。
【总页数】4页(P37-40)
【作者】林志
【作者单位】扬州市超能电动阀门有限公司
【正文语种】中文
【中图分类】TH138.52
【相关文献】
1.多转式智能阀门电动执行机构控制系统设计
2.一种基于PROFIBUS-DP/V1现场总线的智能型阀门电动执行机构
3.智能多转式电动阀门执行机构控制系统设计
4.
提高核电厂智能型阀门电动执行机构运行可靠性的设备管理方法探讨5.非智能型阀门电动执行机构改造在电厂中的应用
因版权原因,仅展示原文概要,查看原文内容请购买。
电动阀门智能控制器的设计
书山有路勤为径,学海无涯苦作舟
电动阀门智能控制器的设计
以AT80C2051 作为微控制器设计电动阀门智能控制器,完成了电动阀门的位置检测、远程控制信号转换、参数整定与灵敏度调整、阀门电机驱动电路及键盘、显示等硬件电路设计,在建立数学模型的基础上,设计并验证了系统的P
在现代工业自动控制中,调节阀是最主要的执行器件之一,在石油、化工、电力、水利等行业发挥着重要的作用。
但国内电动调节阀技术与国外相比还有很大差距,国内电动调节阀普遍具有结构不合理,控制精度低,安全性能差,不能很好地进行人机通话、难于现场标定和维修等缺陷。
随着电子技术、控制技术及通讯技术的发展,国内阀门厂家纷纷对电动调节阀进行研究,各项指标和性能都有所提高,但是相应的成本也提高不少,价格比较昂贵的。
为此研究一款价格实惠、结构简单、功能齐全、便于现场操作和集中控制的电动调节阀。
1、硬件结构 1.1、总体结构
系统的硬件电路主要由阀门的位置反馈信号检测、远端控制信号的转换
和现场参数整定与灵敏度调整电路所构成的模拟量输入通道、A/D 转换、伺服电机驱动及减速运行的输出电路、D/A 转换和外围键盘显示等电路以及上位机远程通讯等组成,如1.2、输入通道电路设计
输入通道主要由阀门位置检测信号、远端控制中心信号、现场参数整定
与灵敏度调整电路与A/D 转换电路组成。
用安装在阀门电动机执行机构上的位置变送器来检测实际开度反馈信号,位置变送器是高性能的导电塑料精密旋转电位器,具有较高分辨力的、高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
阀门电动执行器控制模块设计
一、设计目的和要求
电气控制技术综合实践是电气工程及其自动化专业学生在所有专业课结束时进行的一次课程设计,是一个综合运用专业知识的过程。
其目的在于全面检验学生对专业基础课和专业课知识的掌握情况,提高知识综合运用能力和动手实践能力。
设计包括确定控制任务、系统总体方案设计、硬件系统设计、控制软件的设计、系统调试、性能测试等方面的要求,以便使学生掌握电气控制系统设计的总体思路和方法。
二、设计内容及步骤
1 任务提出
电动执行器是工业过程控制中的重要设备,它接收来自调节器的模拟信号(一般是4~20mA 电流信号)或上位机的数字信号, 将其转换为电动执行器相对应的机械位移(转角、直线或多转)并自动改变操作变量(调节阀、风门、挡板开度等),以达到对被调参数(温度、压力、流量、液位等)进行自动调节的目的,使生产过程按预定要求进行。
本课题要求设计一个阀门电动执行器控制模块。
1.1 对象参数:
(1)电动机为单相异步电动机,额定功率10W,额定电流0.16A,外接电容CBB61、1.5uF500V。
(2)电源:220V±10%,50Hz。
(3)环境温度:-25~80℃。
(4)环境湿度:≤95%RH。
1.2 基本功能要求:
(1)输入4~20mA或1~5V控制信号,相应阀门开度在0~100%之间变化。
(2)输入信号失效,位置保持原位。
(3)可就地手动操作。
(4)死区可以调整。
1.3 扩展功能要求(选做)
(1)过力矩保护。
(2)行程限位保护。
(3)定位误差:≤1%。
(4)灵敏度:0.025%(1/4096)。
三、阀门电动执行器控制模块工作原理
电动执行器主要由控制器、电机和减速器三部分组成,由上位调节装置给出的1~5V电压信号Us,减速器输出的直线位移信号x(或角位移信号θ)经位置检测装置后形成位置反馈信号Uf,这两个信号经比较和放大后控制电机的运转,电机带动减速机构产生相应的直线位移或转角位移。
四、硬件原理图
电路总原理图 1
系统总体方案
将给定的1V~5V直流信号与模拟阀门位置的电位器分压得到的电压进行比差动放大,根据差动放大结果分别接通PNP或者NPN两个不同的三极管,三极管接通后光耦得电,触点接通,220V电机驱动电路分别得电,使电机实现正转或者反转。
为了判断给定信号是否小于1V,无法判定是线路断掉还是刚上电时信号还没给上,所以我们设定,当输入端的信号小于1V时,让比较器的输出端驱动光耦接
通让其接地。
这时,比较器的输出不再经过三极管,也就不会进行正反转。
在前面电路中,我们要保证运放比较器的负端要得到5v可调的电压,用一个可调大小的电位器来当作电机里面用于负反馈确定电机当前位置的电位器。
当运放比较器的正端输入大于负端时,输出为正电压,接通正转电路的三极管实现正转。
反之,则接通反转电路实现电机反转。
为了得到稳定的5v电源,我们用一个稳压二极管来稳压,并且通过一个同相比例放大电路来提高电路前段的带负载的能力。
放大倍数为(Rf/R1)+1。
若方案可行,我们将会规定这里的放大倍数为1.5倍左右。
驱动主电路里的比较电路,我们选用反相比例运算电路,负端接稳压二极管经过同相比例放大电路后的电压可调范围约为1~5V。
而正端则是接输入信号为
1~5V的给定信号。
反馈线路则是用比例和积分并联来确保基准电压。
并且在反馈端接入电位器来调节放大倍数。
因为是反相比例运算电路,其放大倍数为Rf/R1,我们这里大概放大倍数为48倍左右,并且有一定范围可调。
之后用一个5.6V的稳压二极管和二极管串联,并且通过三极管的b e两端0.7V 的电压差,大概需要7v的电压来驱动光耦。
4.1电源模块
4.1.1 ±12v稳压电源
两相220v交流电经过变压器降压,再经过整流滤波稳压后(电容起着滤波的作用、7812和7912起着稳压的作用),使它输出较为稳定的+12V与-12V电压。
为控制电路提供电源。
4.1.2 +12V电压稳压输出+5V
用LM236精确三端稳压管进行稳压,输出稳定的5V电压,通过一个同相比例放大电路来提高电路前段的带负载的能力。
4.1.3 输入电压优化
在输入端加了250Ω采样电阻,将电流信号变为电压信号。
防止输入电压过大,加了一个12V的稳压管。
4.2 差分放大电路
正端则是接输入信号为1~5V的可调给定信号。
负端输入的为阀门反馈信号(通过齿轮调节电位器的反馈电压),反馈线路则是用比例和积分并联来确保基准电压。
并且在反馈端接入1k电位器来调节放大倍数,也就是用来调节死区。
4.3 控制正反转
P点电压通过一个5.6V的稳压二极管和二极管的串联,从而控制三极管通断,来控制电机正反转。
稳压管D5和D7的作用是设置死区,为了防止电机受到干扰信号而频繁的启动停止,会影响电机的使用寿命。
两个开关为手动控制开关,当开关闭合时三极管被短路,此时电机转动。
4.4 驱动电机电路
以光电晶闸管来传输电路通断信息以避免信号之间干扰,起到控制电机正反转的效果,并用1k限流电阻来驱动发光二极管使之正常工作
电阻R15与电容C7是一个缓冲电路,目的是保护双向进闸管。
4.5 低压保护电路
用比较器判断输入电压是否小于1V,小于1V则电路P点接地,电路处于低压保护状态
五、心得体会
本次学习让我了解了电路的设计步骤,对电路设计有了一个初步的认识。
在此感谢老师的指点,在老师的帮助下设计出来了一个能够正常稳定工作的电路。
电路实验过程中发现了几处因为电阻参数设置不行而导致电路无法正常工作。
比如电路的放大倍数过高,导致死区过小无法很好地进行控制。
光耦合器件,因为采用10k电阻所以导致驱动电流太小无法正常工作。