MEMS陀螺标度因数误差分析及分段插值补偿
MEMS陀螺误差模型标定实验与分析

MEMS陀螺误差模型标定实验与分析李勋;张欣;孙朔冬;鲍其莲【摘要】In this paper, two simplified linear and nonlinear models were established for MEMS gyroscopes static errors as well as a random model for random errors exiting in gyroscopes. Parameters of static models were estimated by least square method. The parameters of random error models were given by Allan variance analysis. The experiment results of two MEMS gyroscopes showed that the characteristic parameters are determined by given methods.%陀螺仪的误差模型与标定对于陀螺仪误差补偿非常关键.本论文针对陀螺仪的误差,分别建立了静态一阶与二阶简化模型以及随机误差模型,通过采用最小二乘法与Allan方差分析法进行了参数标定.最后,通过MEMS陀螺的实验结果获得了陀螺的特性参数,验证了模型及标定方法的有效性.【期刊名称】《电子设计工程》【年(卷),期】2017(025)017【总页数】4页(P164-167)【关键词】陀螺仪;误差模型;最小二乘法;Allan方差【作者】李勋;张欣;孙朔冬;鲍其莲【作者单位】深圳供电局有限公司广东深圳 518048;深圳供电局有限公司广东深圳 518048;上海交通大学电子信息与电气工程学院,上海200240;上海交通大学电子信息与电气工程学院,上海200240【正文语种】中文【中图分类】TN967.2微惯性器件是MEMS发展的重点,如硅微加速度计、硅微陀螺仪和硅微惯性测量组合等,硅微惯性器件相较于传统陀螺,具有轻便易于安装、使用寿命长、可靠性高、耐冲击、易于批量生产等特点,在汽车、无人机、等导航系统中具有广泛应用。
MEMS陀螺仪零位误差分析与处理

MEMS陀螺仪零位误差分析与处理陈旭光;杨平;陈意【摘要】Study on zero position error of MEMS gyroscope has a great value on improving the accuracy of inertial navigation system. Allan variance analysis melhod was adopted to evaluate on zero position error of MEMS gyroscope. A kind of dynamic zero offset compensation algorithm was presented to eliminate the zero offset error. HDR( Heuristic Drift Reduction) was also improved and the compensation accuracy of original algorithm was increased effectively. Finally, Allan variance analysis method was adopted to evaluate on the compensated zero position error. Test had been done with the platform of gyro-equipped indoor mobile robot Voyager-lIA and the results show precision was increased significantly with the improved algorithm.%研究微机械陀螺仪的零位误差对提高惯性导航精度具有重要意义.采用Allan方差分析法对MEMS陀螺仪的零位误差做了综合评定,提出了一种动态的零值偏移误差补偿算法来滤除陀螺仪的零值偏移误差,还对启发式漂移消减法HDR(Heuristic Drift Reduction)做了改进,有效地提高了原算法的补偿精度.最后,再次采用Allan方差分析法对补偿后的零位误差进行评定,并以Voyager-IIA机器人为平台进行试验,结果证明了改进后的算法能显著的提高陀螺仪的输出精度.【期刊名称】《传感技术学报》【年(卷),期】2012(025)005【总页数】5页(P628-632)【关键词】MEMS陀螺仪;零位误差;启发式漂移消减法;动态补偿;Allan方差分析【作者】陈旭光;杨平;陈意【作者单位】电子科技大学机械电子工程学院,成都 611731;电子科技大学机械电子工程学院,成都 611731;电子科技大学机械电子工程学院,成都 611731【正文语种】中文【中图分类】V241.5微电子机械系统MEMS(Micro-Electro-Mechanical System)陀螺仪以其尺寸小、质量轻、价格低的优点越来越受到人们的重视,但是精度较低限制了它的应用领域。
MEMS-IMU误差分析补偿与实验研究共3篇

MEMS-IMU误差分析补偿与实验研究共3篇MEMS-IMU误差分析补偿与实验研究1MEMS-IMU误差分析补偿与实验研究MEMS-IMU是现代导航技术中不可或缺的部分。
在导航、飞行控制、车载导航、医疗设备等领域中,MEMS-IMU已经被广泛应用。
MEMS-IMU的核心是由加速度计和陀螺仪构成的惯性测量单元,可以测量物体在三个方向的加速度和角速度。
但是由于受到多种因素影响,如环境温度、加速度计和陀螺仪的制造工艺和精度等等,MEMS-IMU的测量结果中存在着各种误差,因此在实际应用中需要进行误差分析和补偿。
MEMS-IMU误差来源主要有几部分:零偏误差、尺度因数误差、非正交误差、温度漂移误差以及振动干扰误差。
其中,零偏误差是指在静止时,MEMS-IMU的输出不为零值,可能是由于制造工艺等原因导致的。
尺度因数误差是指MEMS-IMU的输出信号与实际物理量之间的比例误差。
非正交误差是指MEMS-IMU的三个方向之间存在一定的耦合,导致误差的传输,造成角速度或加速度量纲的不一致。
温度漂移误差是指在不同温度环境下,MEMS-IMU的输出信号会发生变化。
振动干扰误差是指由于外部环境的振动、冲击等干扰,导致MEMS-IMU的输出出现异常。
为了准确测量物体在三个方向的加速度和角速度,需要对MEMS-IMU的误差进行分析和补偿。
误差分析的目的是找出每种误差源并对其进行定量分析。
误差补偿的目的是根据误差分析结果对MEMS-IMU的测量结果进行修正,提高其测量精度。
误差补偿方法主要有两种:基于标定的补偿方法和基于模型的补偿方法。
前者通过根据实验数据拟合出误差模型参数,再降低误差的影响。
后者通过模型分析和仿真,推导出误差模型,然后根据模型进行误差补偿。
为了验证误差分析和补偿方法的效果,我们在实验室中进行了多组实验。
首先,我们对MEMS-IMU进行了标定,得到了相应的误差模型。
然后,通过基于标定的补偿方法和基于模型的补偿方法对误差进行了补偿。
mems陀螺随机误差建模与补偿

mems陀螺随机误差建模与补偿近些年,MEMS(Micro-electromechanical Systems)技术的快速发展对工程领域的数据采集技术带来了普遍的影响。
随着MEMS技术的应用,陀螺传感器作为一种重要的传感器技术,广泛应用于航空、航天、汽车行业及陆域的水文测量等多个领域。
但是,MEMS陀螺传感器在使用过程中,会遭受来自环境影响、温度影响、电磁干扰等一系列外部因素对其精度造成影响,甚至会导致其测量数据出现一定程度的随机误差。
而由随机误差引起的系统失稳问题已经成为影响MEMS陀螺精度的主要原因之一。
为了克服MEMS陀螺随机误差,首先要建立它们的误差模型。
这使得信号处理系统能更准确地模拟真实环境中陀螺传感器受到随机影响的行为,从而更好地满足陀螺精度校准和传感器精度补偿的需求。
目前有很多可用于建立随机误差模型的方法,如差分培根谱法,基于时域均方根值的系统灵敏度分析,改进的统计函数建模和基于最大似然估计的方法等。
经过模型建立,就可以采用不同的补偿方法来解决MEMS陀螺随机误差问题,这其中包括在传感器输出端采用反馈补偿(Feedback compensation)、自适应补偿(Adaptive compensation)和一般带宽低通特性补偿(Low-pass filter)等。
首先,反馈补偿技术是一种经典的陀螺补偿方法,它通过不断的检测陀螺的转速信号,通过调整控制器的输入获取环路系统的反馈信号,从而达到陀螺精度补偿的效果。
其次,自适应补偿技术也可以有效地抵消MEMS陀螺随机误差。
它通过利用虚拟输入和虚拟输出的抽样时间来不断学习和更新陀螺传感器的误差模型,有效补偿其随机误差。
此外,还可以使用一般带宽低通特性补偿技术,其原理是通过利用低通滤波器对传感器输出数据进行滤波,以实现补偿MEMS陀螺传感器随机误差的目的。
最后,基于改进统计方法的补偿技术也是被广泛使用的一种补偿方式,它将多次采集的陀螺传感器的原始输出数据进行分析,利用改进的统计函数把随机噪声模型应用到陀螺传感器的原始数据中,从而补偿随机误差。
MEMS陀螺误差辨识与补偿

2010年第29卷第3期 传感器与微系统(T r a n s d u c e r a n dM i c r o s y s t e mT e c h n o l o g i e s)M E M S陀螺误差辨识与补偿谈振藩,张勤拓(哈尔滨工程大学自动化学院,黑龙江哈尔滨150001)摘 要:由于制造工艺等原因,M E M S陀螺的随机漂移非常大,严重影响了系统的性能。
通过自制的基于M E M S的捷联惯导系统的相关实验,对M E M S陀螺的确定性误差和随机误差分别进行了辨识和补偿。
完成确定性误差补偿,对M E M S陀螺随机误差进行了时间序列分析,并建立了A R模型,根据所选模型参数建立了随机误差的系统方程,采用经典卡尔曼滤波进行随机误差补偿。
实验结果说明:无论是静态下还是动态下,补偿后信号的方差都大大下降,说明了滤波效果较为明显,具有一定的工程应用价值。
关键词:M E M S陀螺;时间序列分析;A R模型;卡尔曼滤波中图分类号:T P212 文献标识码:A 文章编号:1000—9787(2010)03—0039—03E r r o r i d e n t i f i c a t i o na n dc o m p e n s a t i o no f ME MSg y r o s c o p eT A NZ h e n-f a n,Z H A N GQ i n-t u o(C o l l e g e o f A u t o m a t i o n,H a r b i nE n g i n e e r i n g U n i v e r s i t y,H a r b i n150001,C h i n a)A b s t r a c t:M E M Sg y r o's r a n d o m d r i f t i s v e r yl a r g e,b e c a u s eo f t h em a n u f a c t u r i n gp r o c e s sa n do t h e r r e a s o n s,w h i c hs e r i o u s l y a f f e c t o n s y s t e mp e r f o r m a n c e.T h r o u g h e x p e r i m e n t s o f M E M S s t r a p d o w n i n e r t i a l n a v i g a t i o ns y s t e m,d e t e r m i n i s t i c a n ds t o c h a s t i c e r r o r w a s i d e n t i f i e da n dc o m p e n s a t e d.A f t e r d e t e r m i n i s t i ce r r o r w a s c o m p e n s a t e d,t h es t o c h a s t i ce r r o r w a s a n a l y z e d b a s e d o nt i m e s e r i e s a n dA Rm o d e l w a s s e t u p.S y s t e m e q u a t i o no f s t o c h a s t i ce r r o rw a s e s t a b l i s h e d b a s e d o nt h e s e l e c t e dm o d e l a n dt h ee r r o r w a s c o m p e n s a t e db y K a l m a nF i l t e r.T e s t r e s u l t s s h o wt h a t v a r i a n c e o f M E M S g y r o s c o p e s t o c h a s t i c e r r o r r e d u c e d g r e a t l y a f t e r f i l t e r,w h i c h i l l u s t r a t e s t h e f i l t e r i n g e f f e c t i so b v i o u s,a n d h a s a c e r t a i nv a l u e o f e n g i n e e r i n g a p p l i c a t i o n.K e yw o r d s:M E M S g y r o s c o p e;t i m e s e r i e s a n a l y s i s;A Rm o d e l;K a l m a nf i l t e r0 引 言微机电系统(m i c r o-e l e c t r o-m e c h a n i c a l-s y s t e m,M E M S)陀螺仪已经出现了近二十年[1],与其他陀螺相比,M E M S陀螺在体积、成本、功耗和抗冲击能力等方面都存在很大优势,但由于早期精度较低,并没有引起重视。
mems陀螺随机误差建模与补偿

mems陀螺随机误差建模与补偿
MEMS陀螺随机误差建模与补偿是采用数学方法模拟微机电系统(MEMS)所产生的随机振动误差,并对其进行补偿,以改善其可靠性和精度。
随机误差建模和补偿通常利用一个模型,它利用从陀螺仪反馈出来的位置、速度或加速度信息来模拟陀螺仪的随机噪声。
具体而言,这种模型可以以不同方式建立,从而有效地模拟MEMS陀螺仪所产生的位置、速度、加速度和频率误差。
随机误差建模的第一步是将反馈的位置、速度或加速度信息转换为功率谱,以便更好地分析误差的特性。
然后将模型化成一定长度的时域过程,然后根据这一过程对误差参数进行估计。
最后,通过拟合功率谱和参数估计来判断模型的准确性,并确定MEMS的随机误差补偿方案。
随机误差补偿一般可以采用两种方式实现,即:信号补偿和结构补偿。
信号补偿通常是使用一些滤波器来减小模型的噪声,以改善信号的精度。
结构补偿则是对陀螺仪的结构进行改进,以抑制误差的源头,甚至抵消部分误差,从而获得更好的精度。
MEMS陀螺仪所产生的随机误差主要来自于设备内部的失真、电磁抖动和湿度抖动等因素,这些误差可利用MEMS陀螺随机误差建模与补偿技术加以抑制,以改进陀螺仪的精度和可靠性。
MEMS惯性传感器技术的误差补偿及可靠性研究_李瑞养
84
数字技术 与应用
应用研究
表 1 失效信息 表 3 可靠性试验项目
表 2 失效机理与外界关系
模式,最大化系统共振振幅;二是提高检测模态的质量因 子QS ,一 般是通过真空手段来降低它的阻尼,提高质量因子。 美国佐治亚理 工学院在2008年采用一种使用自动模态匹配技术的音叉振动板陀 螺( M 2 - TFG ),此陀螺的驱动模态和检测模态间的频率差为0,从 而获得了很好的噪声水平和较小的零偏漂移 [2]。
4 MEMS惯性传感器发展趋势
近年来MEMS惯性传感器的性能迅速的提升,目前正由速率级 向战术级精度迈进,MEMS惯性技术随着系统技术的进步和工艺水 平的提高不断发展;未来的发展趋势为:(1)MEMS惯性传感器将向 微型化、 高精度方向发展;(2)多轴MEMS惯性传感器成为趋势;(3) MEMS惯性传感器性能要求将侧重于误差漂移、 迟滞效应小;(4)多 MEMS惯性传感器片上集成化、 智能化成为新的发展方向。
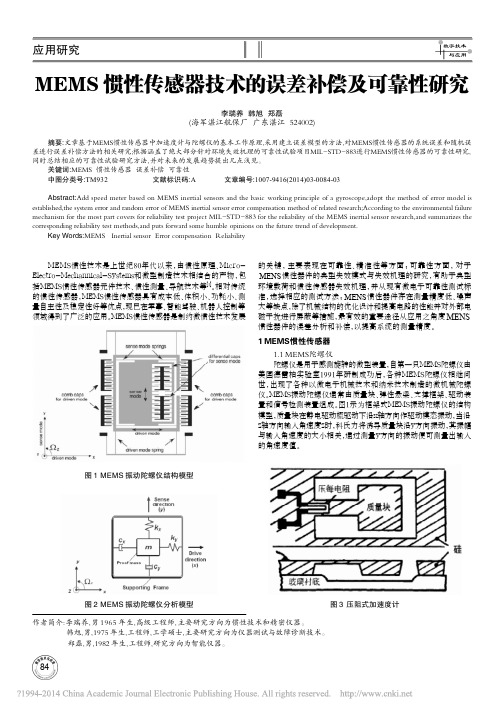
图 1 MEMS 振动陀螺仪结构模型
图 2 MEMS 振动陀螺仪分析模型 作者简介:李瑞养,男 1965 年生,高级工程师,主要研究方向为惯性技术和精密仪器。 韩旭,男,1975 年生,工程师,工学硕士,主要研究方向为仪器测试与故障诊断技术。 郑磊,男,1982 年生,工程师,研究方向为智能仪器。
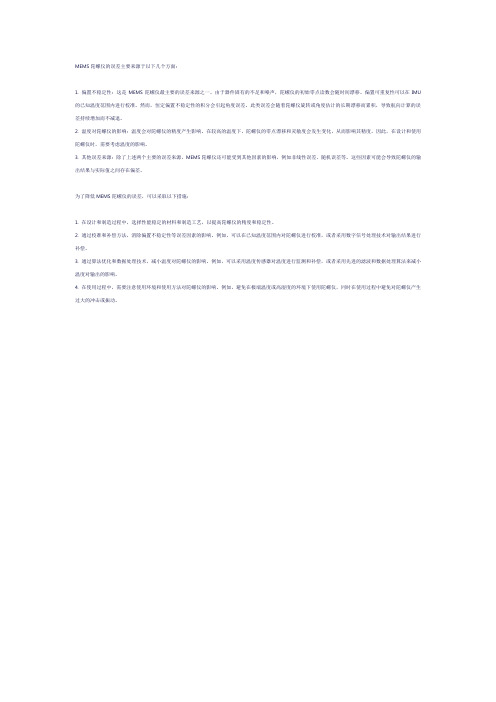
图 3 压阻式加速度计
MENS 振动型陀螺的分析模型如2所示, kx 是驱动模态, k y 检 测振动模态弹性系数, cx 与 c y 是系统的阻尼。 MENS振动陀螺仪一
般通过交流电压应用于静电梳状驱动器来驱动它的振动。 因图2中 系统由于频率为 的电压驱动,在 x 轴方向作驱动模态振动,因此 方程可以表示为:
d 2 x d x c x k x x F 0 s in t d t 2 d t 当沿z轴方向有旋转角速度Ωs 运行,将会有沿 y 轴方向(垂于 x z 平面)的可理奥历力,使得质量块在 y 轴方向的振动,即测试 m
mems陀螺仪误差
MEMS陀螺仪的误差主要来源于以下几个方面:
1. 偏置不稳定性:这是MEMS陀螺仪最主要的误差来源之一。
由于器件固有的不足和噪声,陀螺仪的初始零点读数会随时间漂移。
偏置可重复性可以在IMU 的已知温度范围内进行校准。
然而,恒定偏置不稳定性的积分会引起角度误差。
此类误差会随着陀螺仪旋转或角度估计的长期漂移而累积,导致航向计算的误差持续增加而不减退。
2. 温度对陀螺仪的影响:温度会对陀螺仪的精度产生影响。
在较高的温度下,陀螺仪的零点漂移和灵敏度会发生变化,从而影响其精度。
因此,在设计和使用陀螺仪时,需要考虑温度的影响。
3. 其他误差来源:除了上述两个主要的误差来源,MEMS陀螺仪还可能受到其他因素的影响,例如非线性误差、随机误差等。
这些因素可能会导致陀螺仪的输出结果与实际值之间存在偏差。
为了降低MEMS陀螺仪的误差,可以采取以下措施:
1. 在设计和制造过程中,选择性能稳定的材料和制造工艺,以提高陀螺仪的精度和稳定性。
2. 通过校准和补偿方法,消除偏置不稳定性等误差因素的影响。
例如,可以在已知温度范围内对陀螺仪进行校准,或者采用数字信号处理技术对输出结果进行补偿。
3. 通过算法优化和数据处理技术,减小温度对陀螺仪的影响。
例如,可以采用温度传感器对温度进行监测和补偿,或者采用先进的滤波和数据处理算法来减小温度对输出的影响。
4. 在使用过程中,需要注意使用环境和使用方法对陀螺仪的影响。
例如,避免在极端温度或高湿度的环境下使用陀螺仪,同时在使用过程中避免对陀螺仪产生过大的冲击或振动。